
Review of Nonlocal-in-Time Damping Models in the Dynamics of Structures



Abstract
:1. Introduction
2. Mathematical Modeling of the Internal Friction
3. Non-Classical Models of Composite and Viscoelastic Materials
4. Nonlocal Damping Models
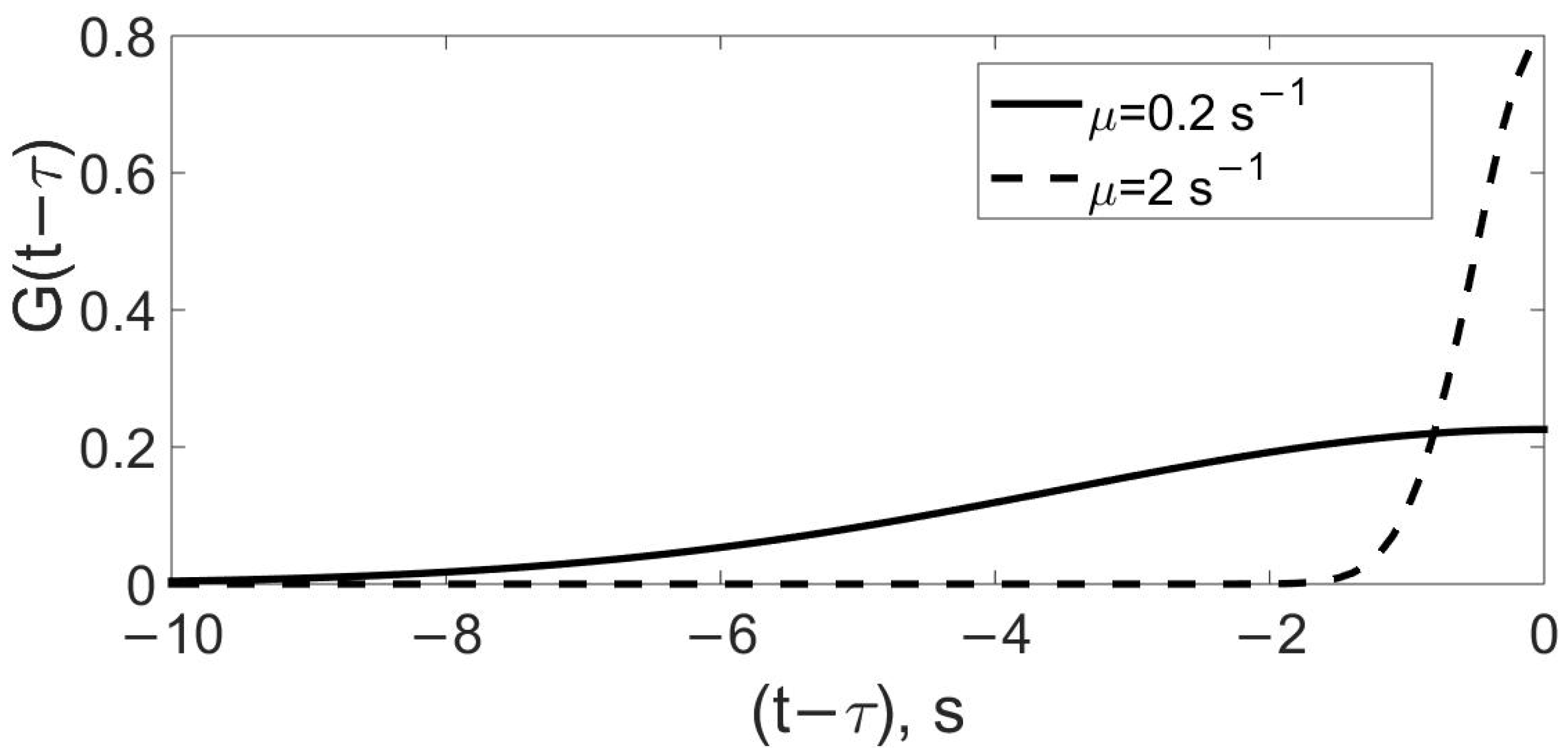
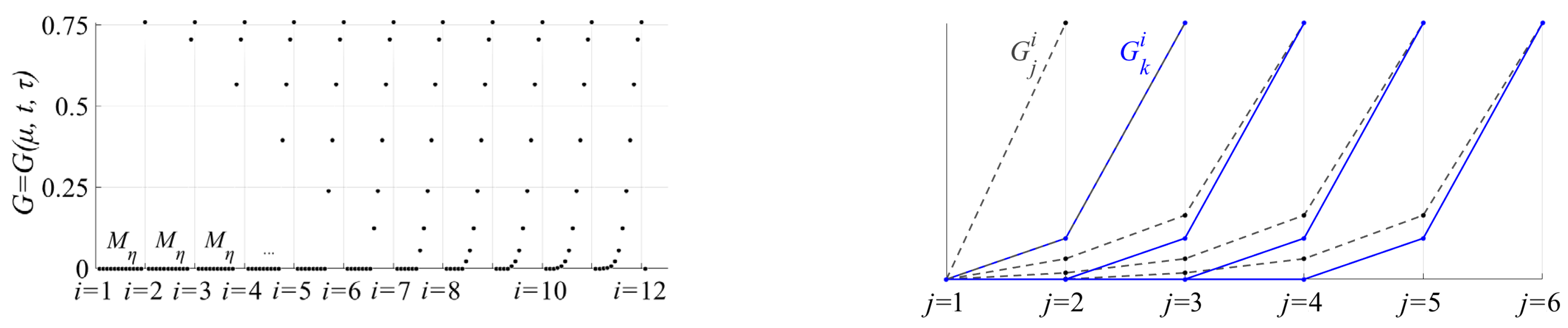
5. Damping-with-Memory Model
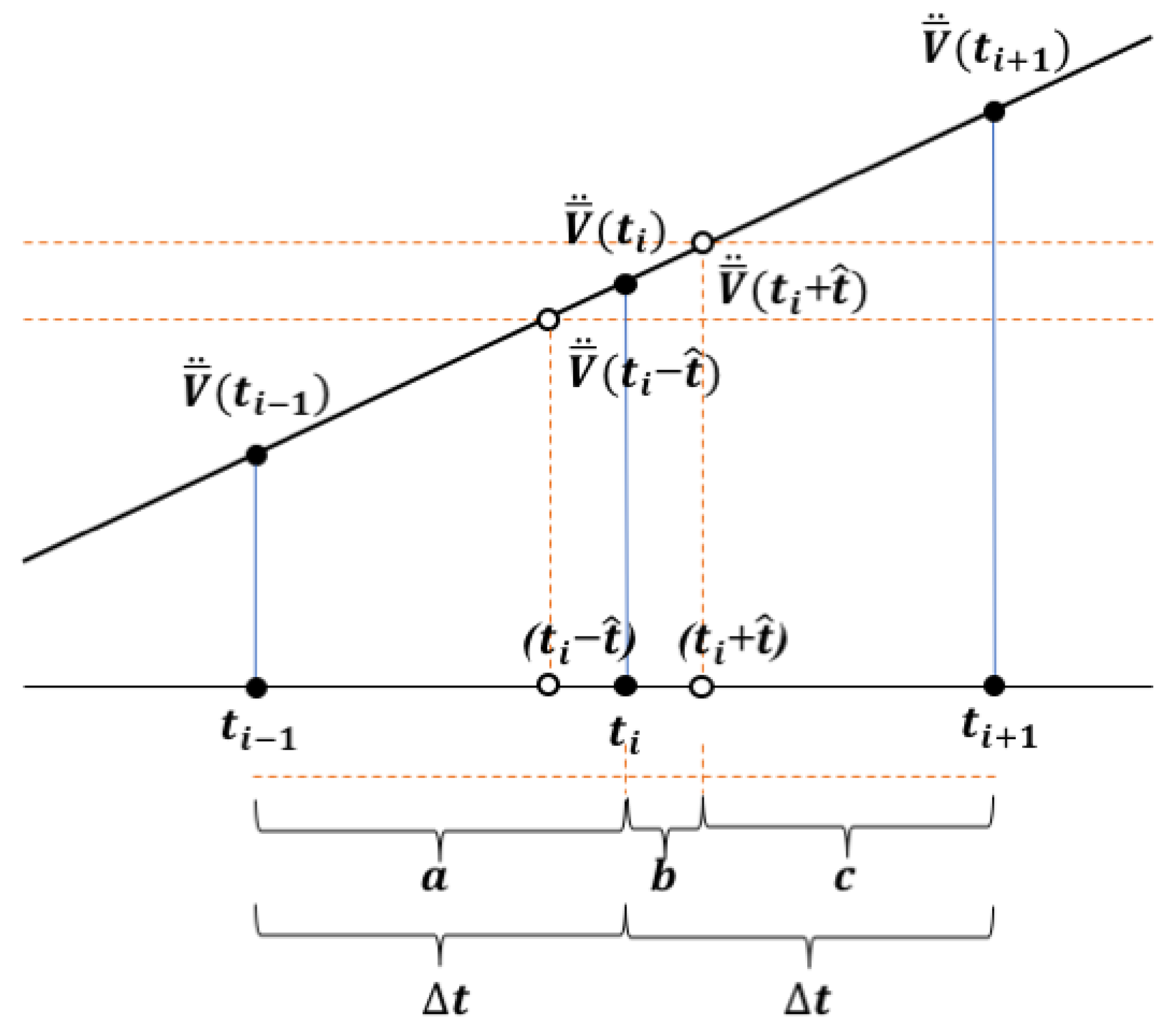
6. Equilibrium Equation Solving with the Method of Central Differences
7. Modified FEA Model Considering Nonlocal Damping Solved by the Implicit Scheme
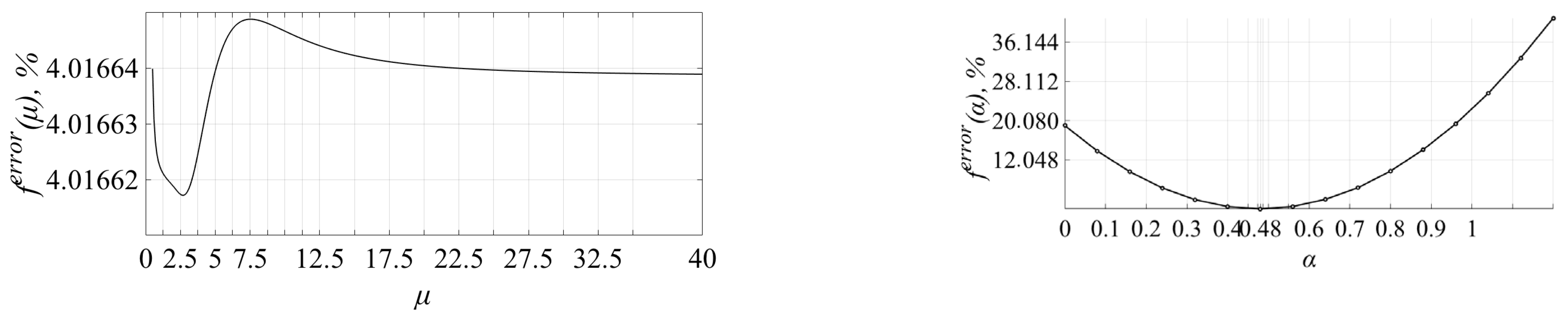
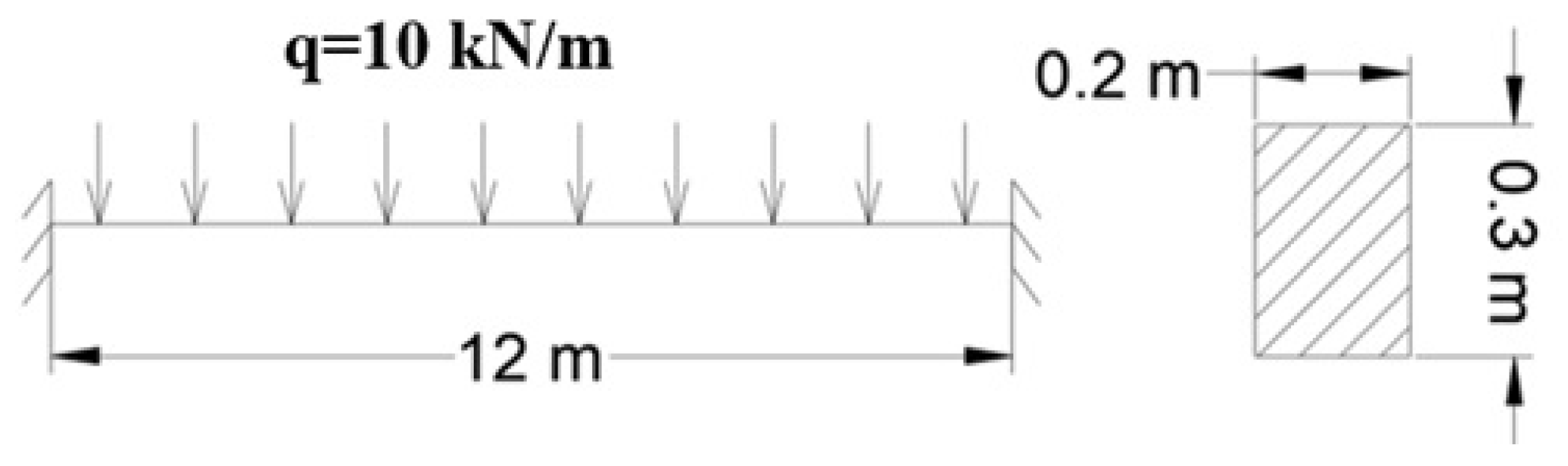
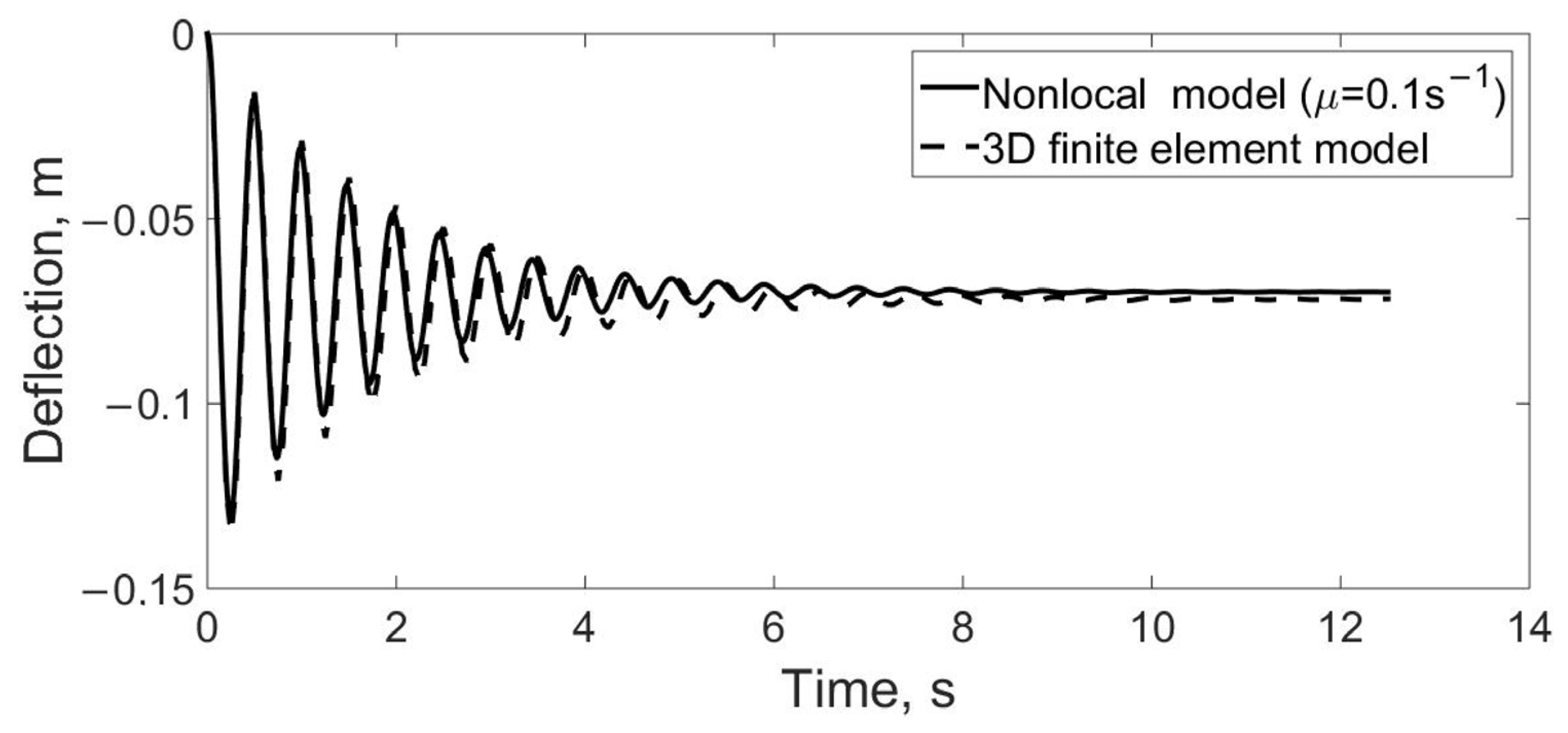
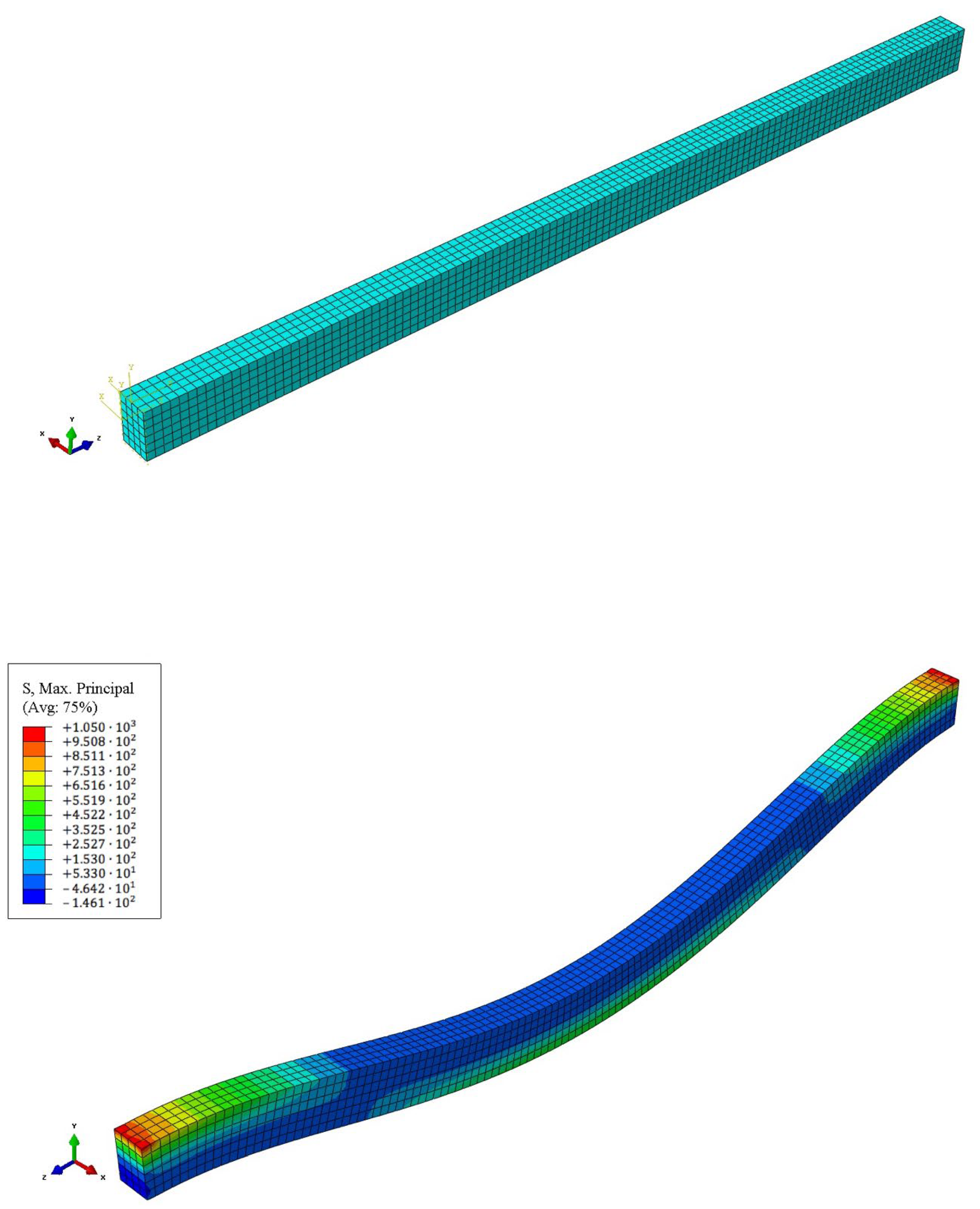
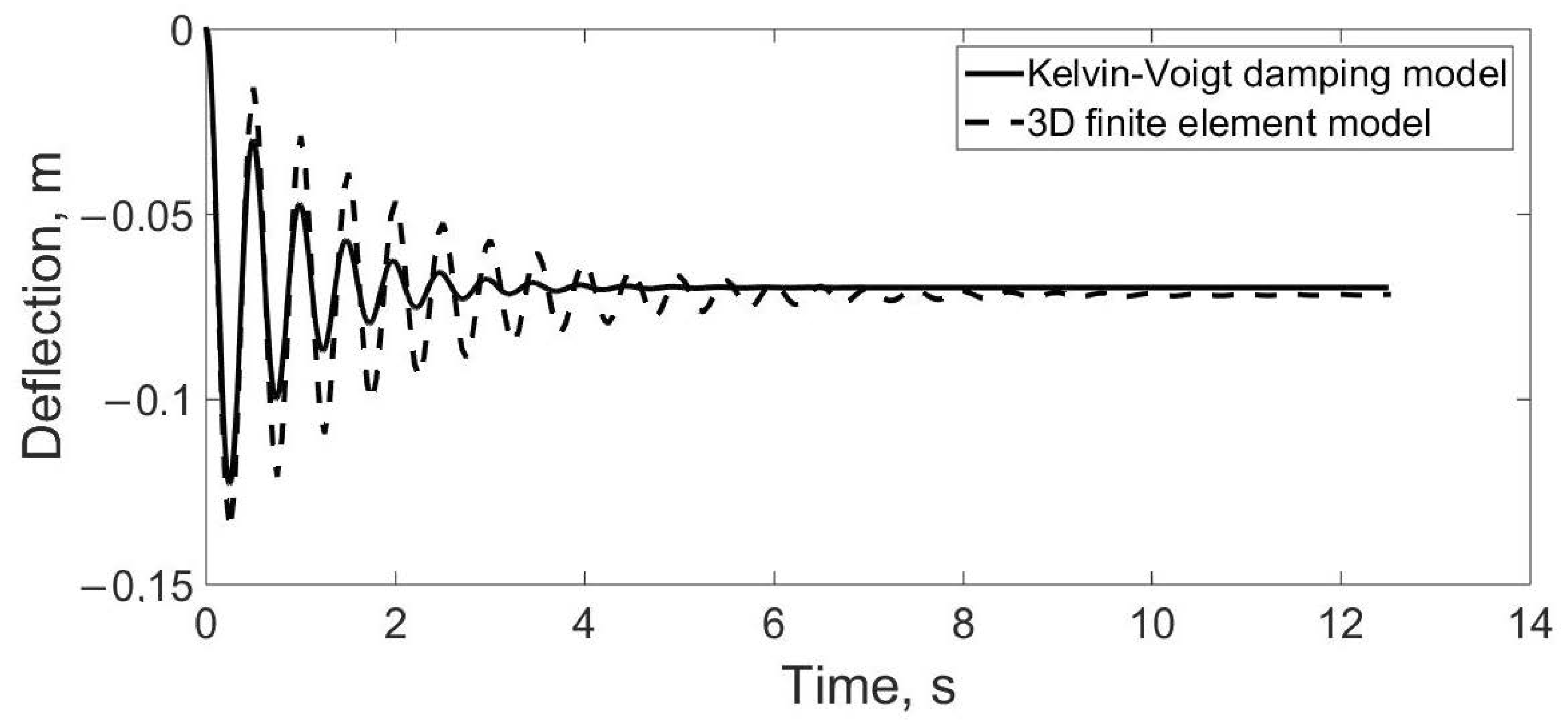
8. Numerical Example and Results for the Beam Model
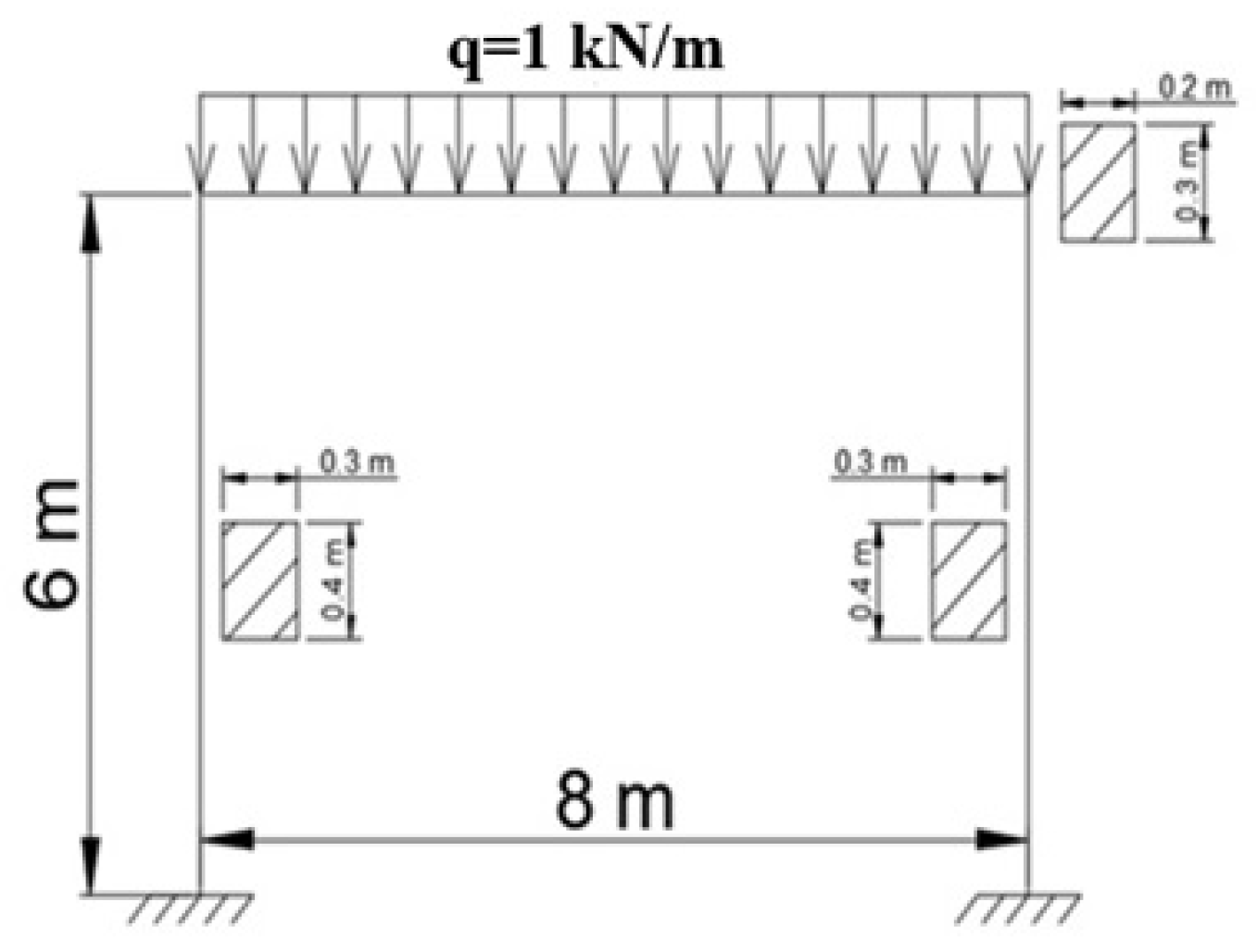
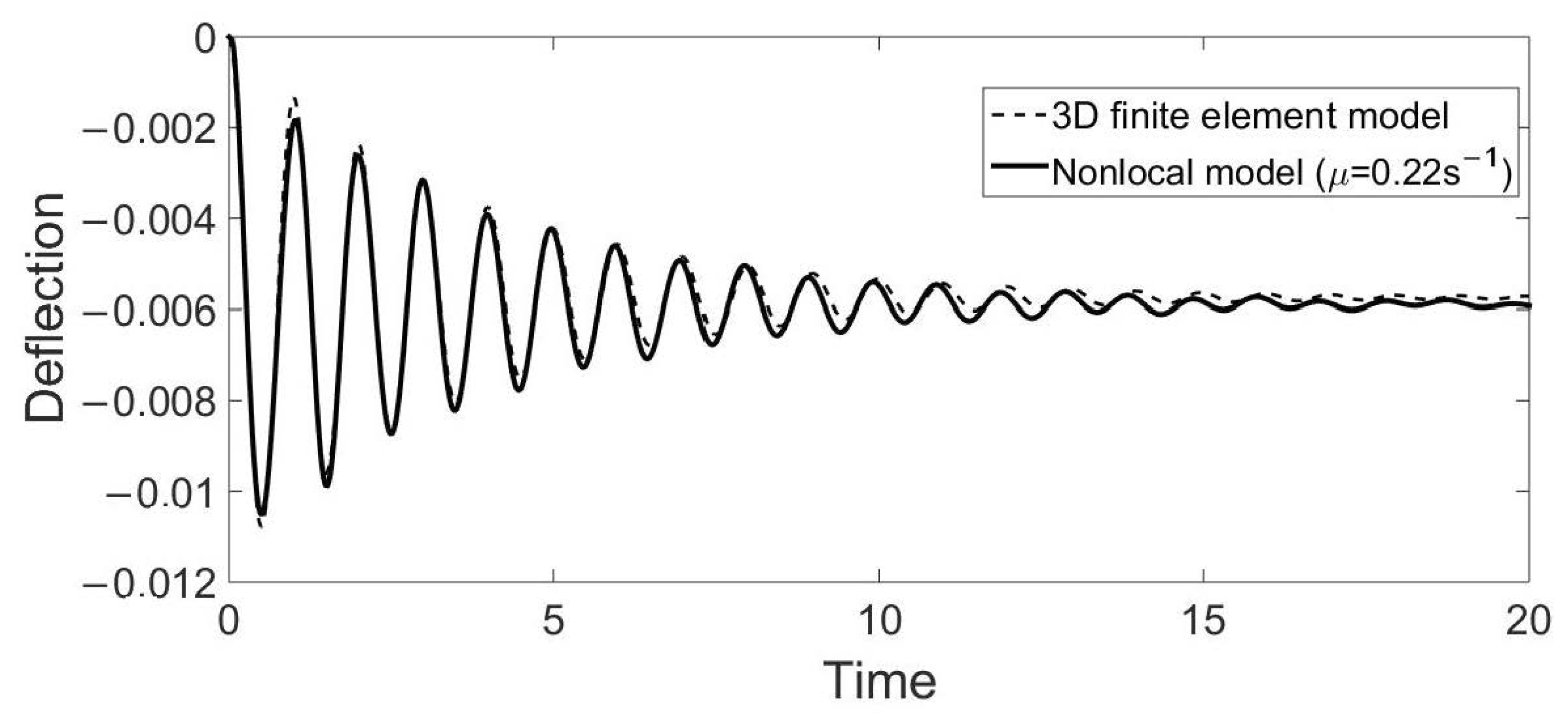
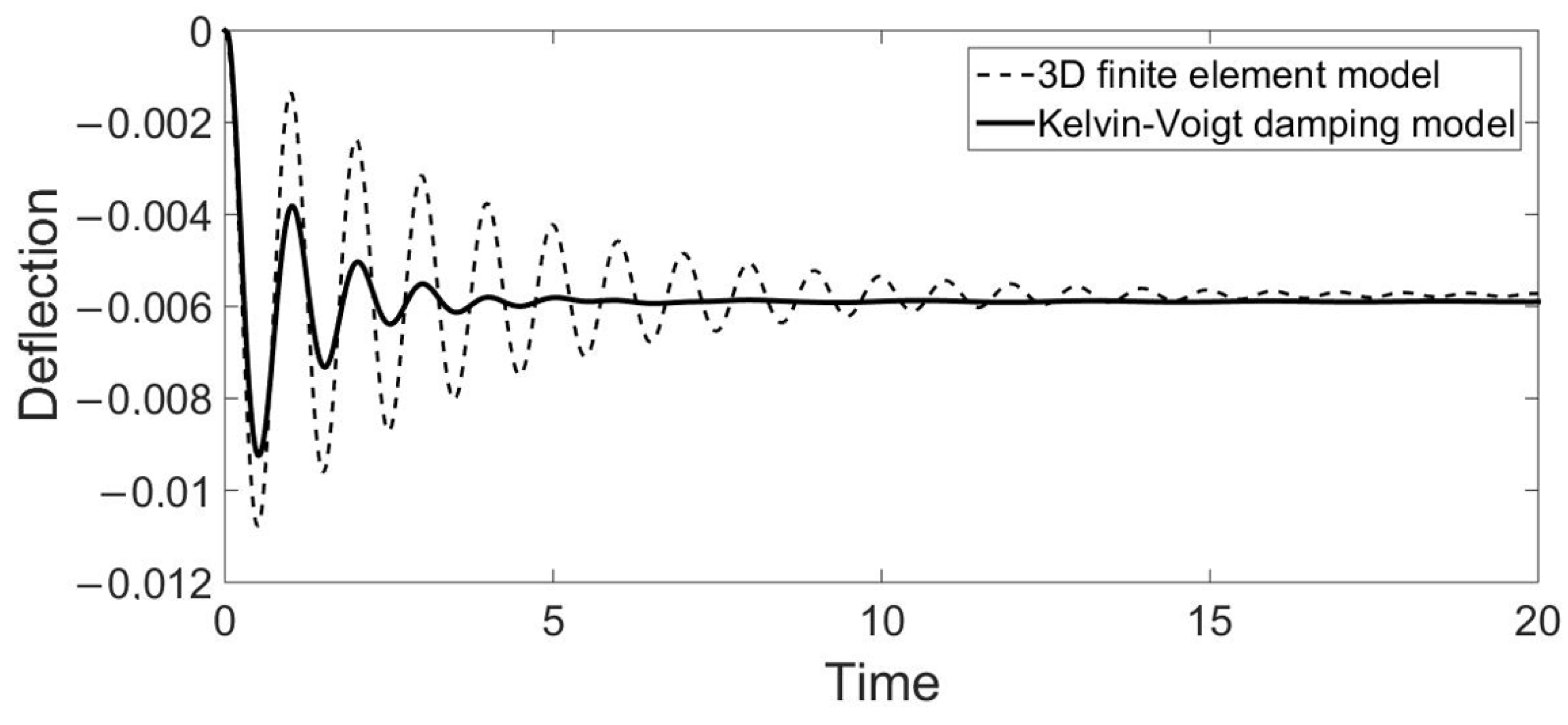
9. Modeling of Composite Frame Vibrations Considering Nonlocal-in-Time Damping Model
10. Numerical Results for the Frame Model
11. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jones, R.M. Mechanics of Composite Materials, 2nd ed.; Taylor & Francis: Abingdon, UK, 1999. [Google Scholar]
- Pobedrja, B.E. Mechanics of Composite Materials; MGU: Moscow, Russia, 1984. (In Russian) [Google Scholar]
- Banks, H.T.; Inman, D.J. On damping mechanisms in beams. J. Appl. Mech. 1991, 58, 716–723. [Google Scholar] [CrossRef]
- Lei, Y.; Friswell, M.I.; Adhikari, S. A Galerkin method for distributed systems with non-local damping. Int. J. Solids Struct. 2006, 43, 3381–3400. [Google Scholar] [CrossRef] [Green Version]
- Postnikov, V.S. Internal Friction in Metals; Metallurgia: Moscow, Russia, 1974. (In Russian) [Google Scholar]
- Tseitlin, A.I.; Kusainov, A.A. Role of Internal Friction in Dynamic Analysis of Structures; Taylor & Francis: Abingdon, UK, 1999. [Google Scholar] [CrossRef]
- Sorokin, E.S. On the Theory of Internal Friction during Vibrations of Elastic Systems; Gosstroyizdat: Moscow, Russia, 1960. [Google Scholar]
- Shitikova, M.V. Fractional operator viscoelastic models in dynamic problems of mechanics of solids: A review. Mech. Solids 2022, 57, 1–33. [Google Scholar] [CrossRef]
- Shitikova, M.V.; Krusser, A.I. Models of viscoelastic materials: A review on historical development and formulation. Adv. Struct. Mater. 2022, 175, 285–326. [Google Scholar] [CrossRef]
- Tschoegl, N. The Phenomenological Theory of Linear Viscoelastic Behavior: An Introduction; Springer: Berlin, Germany, 1989. [Google Scholar]
- Ferry, J.D. Viscoelastic Properties of Polymers; John Wiley & Sons: Hoboken, NJ, USA, 1980. [Google Scholar]
- Fung, Y.C. Foundations of Solid Mechanics; Prentice-Hall: New York, NY, USA, 1965. [Google Scholar]
- Rabotnov, Y.N. Elements of Hereditary Solid Mechanics; Mir Publishers: Moscow, Russia, 1980. [Google Scholar]
- Voigt, W. Lehrbuch der Kristallphysik (mit Ausschluß der Kristalloptik); B.G. Teubner Verlag (Johnson Reprint Corporation): Stuttgart, Germany, 1966. [Google Scholar]
- Maxwell, J.C. On the dynamical theory of gases. Phil. Trans. R. Soc. 1867, 49, 49–88. [Google Scholar] [CrossRef]
- Nashif, A.; Jones, D.; Henderson, J. Vibration Damping; Wiley: Hoboken, NJ, USA, 1984. [Google Scholar]
- Adhikari, S. Damping Models for Structural Vibration. Ph.D. Thesis, Trinity College, Cambridge, UK, 2000. [Google Scholar]
- Adhikari, S.; Woodhouse, J. Identification of damping. Part 2: Non-viscous damping. J. Sound Vib. 2001, 243, 63–88. [Google Scholar] [CrossRef] [Green Version]
- Eremeyev, V.A.; Lurie, S.A.; Solyaev, Y.O.; dell’Isola, F. On the well posedness of static boundary value problem within the linear dilatational strain gradient elasticity. Z. Angew. Math. Phys. 2020, 71, 182. [Google Scholar] [CrossRef]
- Rossikhin, Y.A.; Shitikova, M.V. Application of fractional calculus for dynamic problems of solid mechanics: Novel trends and recent results. Appl. Mech. Rev. 2010, 63, 010801. [Google Scholar] [CrossRef]
- Rossikhin, Y.A.; Shitikova, M.V. Fractional operator models of viscoelasticity. In Encyclopedia of Continuum Mechanics; Altenbach, H., Öchsner, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 2, pp. 971–982. [Google Scholar] [CrossRef]
- Rossikhin, Y.A.; Shitikova, M.V. Fractional calculus in structural mechanics. In Handbook of Fractional Calculus with Applications; Applications in Engineering, Life and Social Sciences, Part A; Baleanu, D., Lopes, A.M., Eds.; De Gruyter: Berlin, Germany, 2019; Volume 7, pp. 159–192. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Jirásek, M. Nonlocal integral formulations of plasticity and damage: Survey of progress. J. Eng. Mech. 2002, 128, 1119–1149. [Google Scholar] [CrossRef] [Green Version]
- Di Paola, M.; Failla, G.; Pirrotta, A.; Sofi, A.; Zingales, M. The mechanically based non-local elasticity: An overview of main results and future challenges. Phil. Trans. R. Soc. A 2013, 371, 20120433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zorica, D. Hereditariness and non-locality in wave propagation modelling. Theor. Appl. Mech. 2020, 47, 19–31. [Google Scholar] [CrossRef]
- Rahimi, Z.; Rezazadeh, G.; Sumelka, W. A non-local fractional stress–strain gradient theory. Int. J. Mech. Mat. Des. 2020, 16, 265–278. [Google Scholar] [CrossRef]
- Alotta, G.; Failla, G.; Zingales, M. Finite-element formulation of a nonlocal hereditary fractional-order Timoshenko beam. J. Eng. Mech. 2017, 143, D4015001. [Google Scholar] [CrossRef]
- Flügge, W. Viscoelasticity, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1975. [Google Scholar]
- Eringen, A.C.; Edelen, D.G.B. Nonlocal elasticity. Int. J. Eng. Sci. 1972, 10, 233–248. [Google Scholar] [CrossRef]
- Pisano, A.A.; Fuschi, P. Closed form solution for non-local elastics bar in tension. Int. J. Solids Struct. 2003, 40, 13–23. [Google Scholar] [CrossRef]
- Polizzotto, C. Nonlocal elasticity and related variational principles. Int. J. Solids Struct. 2001, 38, 42–43. [Google Scholar] [CrossRef]
- Fuschi, P.; Pisano, A.A.; Polizzotto, C. Size effects of small-scale beams addressed with a strain-difference based nonlocal elasticity theory. Int. J. Mech. Sci. 2019, 151, 661–671. [Google Scholar] [CrossRef]
- Ahmadi, G. Linear theory of non-local viscoelasticity. Int. J. Non-Linear Mech. 1975, 10, 253–258. [Google Scholar] [CrossRef]
- Barretta, R.; Marotti de Sciarra, F.; Pinnola, F.P. On the nonlocal bending problem with fractional hereditariness. Meccanica 2021, 57, 807–820. [Google Scholar] [CrossRef]
- Boltzmann, L. Zur Theorie der elastischen Nachwirkung. Ann. Phys. Chem. 1876, 7, 624–657. [Google Scholar]
- Volterra, V. Leçons sur les Fonctions de Lignes; Cauthier-Villard: Paris, France, 1913. [Google Scholar]
- Rabotnov, Y.N. Equilibrium of an elastic medium with after-effect. Prikl. Mat. Meh. 1948, 12, 81–91. English Trans.: Fract. Calc. Appl. Anal. 2014, 17, 684–696(In Russian) [Google Scholar] [CrossRef]
- Rabotnov, Y.N. Creep Problems in Structural Members; Nauka: Moscow, Russia, 1966; English Edition by North-Holland: Amsterdam, Holland, 1969. (In Russian) [Google Scholar]
- Kunin, I.A. Theory of Elastic Media with Microstructure. In The Nonlocal Theory of Elasticity; Nauka: Moscow, Russia, 1975; English Edition: Elastic Media with Microstructure I: One-Dimensional Models. Springer Series in Solid-State Sciences 26; Springer: Heidelberg, Germany, 1982; (In Russian). [Google Scholar] [CrossRef]
- Karličić, D.; Cajić, M.; Murmu, T.; Adhikari, S. Nonlocal longitudinal vibration of viscoelastic coupled double-nanorod systems. Eur. J. Mech. A/Solids 2015, 49, 183–196. [Google Scholar] [CrossRef]
- Karličić, D.; Cajić, M.; Adhikari, S.; Kozic, P.; Murmu, T. Vibrating nonlocal multi-nanoplate system under inplane magnetic field. Eur. J. Mech. A/Solids 2017, 64, 29–45. [Google Scholar] [CrossRef] [Green Version]
- Ghavanloo, E.; Shaat, M. General nonlocal Kelvin–Voigt viscoelasticity: Application to wave propagation in viscoelastic media. Acta Mech. 2022, 233, 57–67. [Google Scholar] [CrossRef]
- Potapov, V.D. Stability via nonlocal continuum mechanics. Int. J. Solids Struct. 2013, 50, 637–641. [Google Scholar] [CrossRef]
- Potapov, V.D. On the stability of a rod under deterministic and stochastic loading with allowance for nonlocal elasticity and nonlocal material damping. J. Mach. Manuf. Reliab. 2015, 44, 6–13. [Google Scholar] [CrossRef]
- Russell, D.L. On mathematical models for the elastic beam with frequency-proportional damping. In Control and Estimation in Distributed Parameter Systems; Banks, H.T., Ed.; SIAM: Philadelphia, PA, USA, 1992; pp. 125–169. [Google Scholar] [CrossRef]
- Adhikari, S.; Friswell, M.I.; Lei, Y. Modal analysis of nonviscously damped beams. J. Appl. Mech. 2007, 74, 1026–1030. [Google Scholar] [CrossRef]
- Friswell, M.I.; Adhikari, S.; Lei, Y. Non-local finite element analysis of damped beams. Int. J. Solids Struct. 2007, 44, 7564–7576. [Google Scholar] [CrossRef]
- Friswell, M.I.; Adhikari, S.; Lei, Y. Vibration analysis of beams with non-local foundations using the finite element method. Int. J. Num. Meth. Eng. 2007, 71, 1365–1386. [Google Scholar] [CrossRef]
- Lei, Y.; Murmu, T.; Adhikari, S.; Friswell, M.I. Dynamic characteristics of damped viscoelastic nonlocal Euler–Bernoulli beams. Eur. J. Mech. A Solids 2013, 42, 125–136. [Google Scholar] [CrossRef]
- Lei, Y.; Adhikari, S.A.; Friswell, M.I. Vibration of nonlocal Kelvin–Voigt viscoelastic damped Timoshenko beams. Int. J. Eng. Sci. 2013, 66–67, 1–13. [Google Scholar] [CrossRef]
- Adhikari, S.; Karličić, D.; Liu, X. Dynamic stiffness of nonlocal damped nano-beams on elastic foundation. Eur. J. Mech. A Solids 2021, 86, 104144. [Google Scholar] [CrossRef]
- Gonzalez-Lopez, S.; Fernandez-Saez, J. Vibrations in Euler–Bernoulli beams treated with non-local damping patches. Comput. Struct. 2012, 108–109, 125–134. [Google Scholar] [CrossRef]
- Puthanpurayil, A.M.; Carr, A.J.; Dhakal, R.P. Application of nonlocal elasticity continuum damping models in nonlinear dynamic analysis. Bull. Earthq. Eng. 2018, 16, 6269–6297. [Google Scholar] [CrossRef]
- Cavalcanti, M.M.; Domingos Cavalcanti, V.N.; Ma, T.F. Exponential decay of the viscoelastic Euler-Bernoulli equation with a nonlocal dissipation in general domains. Diff. Integral Equ. 2004, 17, 495–510. [Google Scholar] [CrossRef]
- Jorge Silva, M.A.; Narciso, V. Long-time behavior for a plate equation with nonlocal weak damping. Diff. Integral Equ. 2014, 27, 931–948. [Google Scholar]
- Jorge Silva, M.A.; Narciso, V. Attractors and their properties for a class of nonlocal extensible beams. Discret. Contin. Dyn. Syst. 2015, 35, 985–1008. [Google Scholar] [CrossRef]
- Jorge Silva, M.A.; Narciso, V. Long-time dynamics for a class of extensible beams with nonlocal nonlinear damping. Evol. Equ. Control Theory 2017, 6, 437–470. [Google Scholar] [CrossRef] [Green Version]
- Jorge Silva, M.A.; Narciso, V.; Vicente, A. On a beam model related to flight structures with nonlocal energy damping. Discret. Contin. Dyn. Syst. Ser. B 2019, 24, 3281–3298. [Google Scholar] [CrossRef] [Green Version]
- Gomes Tavares, E.H.; Jorge Silva, M.A.; Narciso, V. Long-time dynamics of Balakrishnan–Taylor extensible beams. J. Dyn. Diff. Equ. 2020, 32, 1157–1175. [Google Scholar] [CrossRef]
- Zhao, C.; Meng, F.; Zhong, C. The well-posedness and attractor on an extensible beam equation with nonlocal weak damping. Discret. Contin. Dyn. Syst. Ser. B 2023, 28, 2884–2910. [Google Scholar] [CrossRef]
- Potapov, V.D. On the stability of columns under stochastic loading taking into account nonlocal damping. J. Mach. Manuf. Reliab. 2012, 41, 284–290. [Google Scholar] [CrossRef]
- Potapov, V.D. Stability of a flat arch subjected to deterministic and stochastic loads taking into account nonlocal damping. J. Mach. Manuf. Reliab. 2013, 42, 450–456. [Google Scholar] [CrossRef]
- Potapov, V.D.; Shepitko, E.S. Computer modeling of nonlinear system vibrations with allowance for nonlocal damping. Int. J. Comput. Civ. Struct. Eng. 2018, 14, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Fyodorov, V.S.; Sidorov, V.N.; Shepitko, E.S. Nonlocal damping consideration for the computer modelling of linear and nonlinear systems vibrations under the stochastic loads. IOP Conf. Ser. Mat. Sci. Eng. 2018, 456, 012040. [Google Scholar] [CrossRef]
- Shepitko, E.S.; Sidorov, V.N. Defining of nonlocal damping model parameters based on composite beam dynamic behavior numerical simulation results. IOP Conf. Ser. Mat. Sci. Eng. 2019, 675, 012056. [Google Scholar] [CrossRef] [Green Version]
- Fyodorov, V.S.; Sidorov, V.N.; Shepitko, E.S. Computer simulation of composite beams dynamic behavior. Mat. Sci. Forum 2020, 974, 687–692. [Google Scholar] [CrossRef]
- Sidorov, V.N.; Badina, E.S.; Detina, E.P. Nonlocal in time model of material damping in composite structural elements dynamic analysis. Int. J. Comput. Civ. Struct. Eng. 2021, 17, 14–21. [Google Scholar] [CrossRef]
- Sidorov, V.N.; Badina, E.S. Nonlocal numerical damping model in beam dynamics simulation. Lect. Notes Civ. Eng. 2022, 189, 357–363. [Google Scholar] [CrossRef]
- Sidorov, V.N.; Badina, E.S.; Detina, E.P. Modified Newmark method for the dynamic analysis of composite structural elements considering damping with memory. Mech. Compos. Mat. Struct. 2022, 28, 98–111. [Google Scholar] [CrossRef]
- Sidorov, V.N.; Badina, E.S.; Detina, E.P. A modified implicit scheme for the numerical dynamic analysis of beam elements considering nonlocal in time internal damping. Lect. Notes Civ. Eng. 2023, 308, 226–234. [Google Scholar] [CrossRef]
- Bathe, K.J.; Wilson, E.L. Numerical Methods in Finite Element Analysis; Prentice Hall: New York, NY, USA, 1976. [Google Scholar]
- Alexandrov, A.V.; Potapov, V.D.; Zylev, V.B. Structural Mechanics. Book 2. Dynamics and Stability of the Elastic Systems; Vysshaya shkola: Moscow, Russia, 2008. (In Russian) [Google Scholar]
- Sidorov, V.N. Mechanics of Materials; Architecture-S: Moscow, Russia, 2013. [Google Scholar]
- Landherr, J.C. Dynamic Analysis of a FRP Deployable Box Beam. Master’s Thesis, Queen’s University, Kingston, ON, Canada, 2008. [Google Scholar]
- Lim, R.A. Structural Monitoring of a 10 m Fiber Reinforced Polymer Bridge Subjected to Severe Damage. Master’s Thesis, Queen’s University, Kingston, ON, Canada, 2016. [Google Scholar]
- Xie, A. Development of an FRP Deployable Bridge. Master’s Thesis, Royal Military College of Canada, Kingston, ON, Canada, 2007. [Google Scholar]
- Sidorov, V.N.; Badjina, E.S.; Detina, E.P.; Shitikova, M.V. Numerical simulation of the frame structure dynamic behavior by the application of the nonlocal in time damping model. In Proceedings of the 1st International Conference on Mathematical Modelling in Mechanics and Engineering, Belgrade, Serbia, 8–10 September 2022. [Google Scholar]
- Sidorov, V.N.; Badina, E.S.; Detina, E.P. Computer simulation of the composite frame structures vibrations considering nonlocal in time internal damping. Mech. Compos. Mat. Struct. 2022, 28, 543–552. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Classical Models of Damping due to Internal Friction | ||
|---|---|---|
| Kelvin–Voigt model | [3,8,50,63,66] | |
| Sorokin’s complex stiffness model | [3] | |
| Nonlocal models of damping due to internal friction | ||
| Internal friction model nonlocal-in-spatial coordinate x | [3,50,63,64,65,66] | |
| Internal friction model nonlocal-in-time t | [3,67,68,69,70] | |
| Kernel Functions for Nonlocal-in-Space Damping Models | |||
|---|---|---|---|
| Exponential kernel function | [50,63,64,65,66] | ||
| Error kernel function | [3,50,53] | ||
| Hat kernel function | [50] | ||
| Triangular kernel function | [50] | ||
| Kernel functions for nonlocal-in-time damping models | |||
| Exponential kernel function | [67] | ||
| Error kernel function | [67,69,70,71] | ||
| Young’s modulus in the longitudinal direction Elong | 17.2 GPa |
| Young’s modulus in the transverse direction Etrans | 12.2 GPa |
| Poisson’s ratio in the longitudinal direction μlong | 0.32 |
| Poisson’s ratio in the transverse direction μtrans | 0.15 |
| density of the material ρ | 1900 kg/m3 |
| Damping coefficient (critical fraction) | 0.042 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sidorov, V.; Shitikova, M.; Badina, E.; Detina, E. Review of Nonlocal-in-Time Damping Models in the Dynamics of Structures. Axioms 2023, 12, 676. https://doi.org/10.3390/axioms12070676
Sidorov V, Shitikova M, Badina E, Detina E. Review of Nonlocal-in-Time Damping Models in the Dynamics of Structures. Axioms. 2023; 12(7):676. https://doi.org/10.3390/axioms12070676
Chicago/Turabian StyleSidorov, Vladimir, Marina Shitikova, Elena Badina, and Elena Detina. 2023. "Review of Nonlocal-in-Time Damping Models in the Dynamics of Structures" Axioms 12, no. 7: 676. https://doi.org/10.3390/axioms12070676
APA StyleSidorov, V., Shitikova, M., Badina, E., & Detina, E. (2023). Review of Nonlocal-in-Time Damping Models in the Dynamics of Structures. Axioms, 12(7), 676. https://doi.org/10.3390/axioms12070676