
Phase Portraits of Families VII and VIII of the Quadratic Systems

Abstract
:1. Introduction and Statement of the Main Results
- (a)
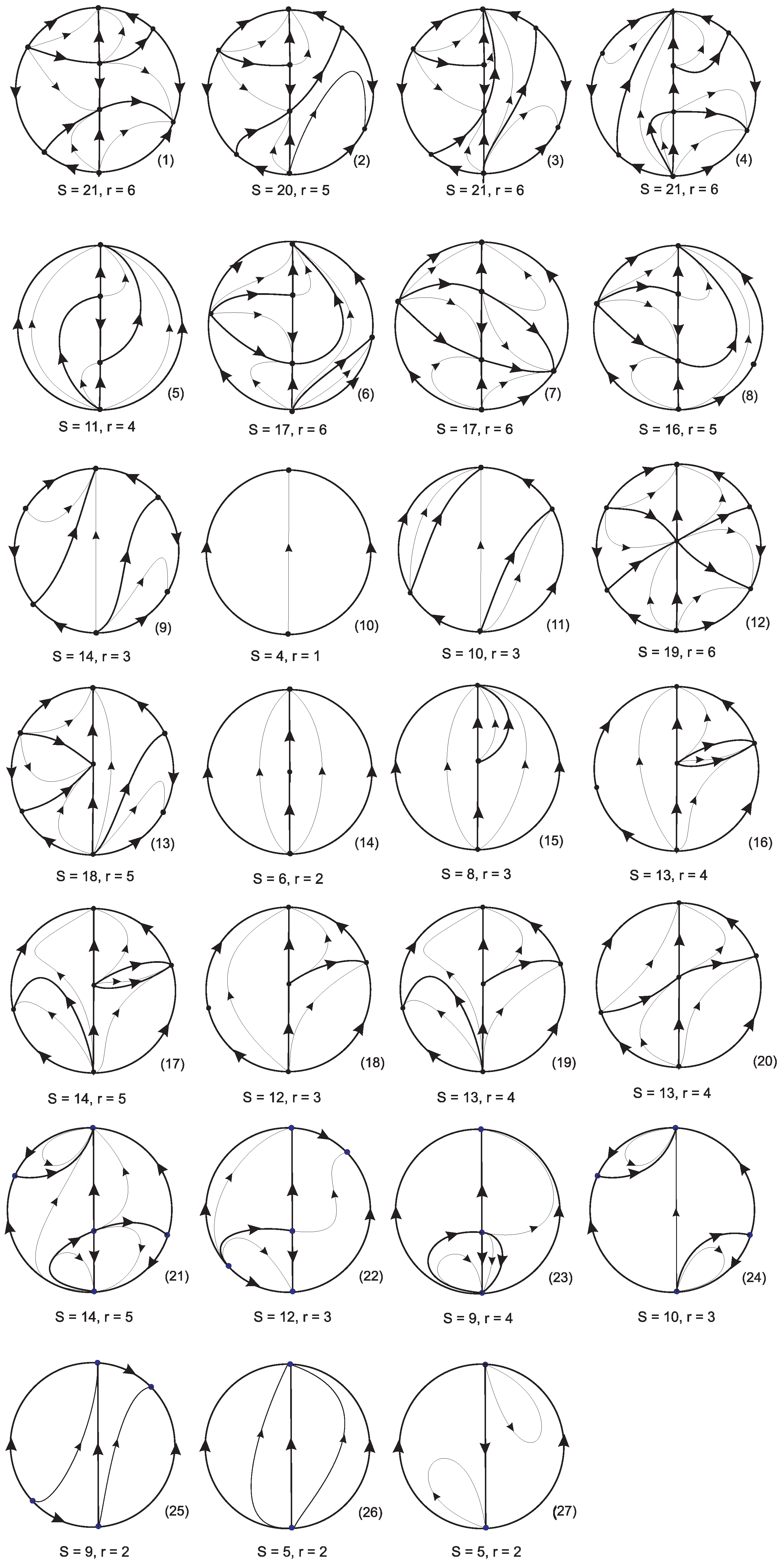
- The family of quadratic systems VII has 27 topologically different phase portraits in the Poincaré disc.
- (b)
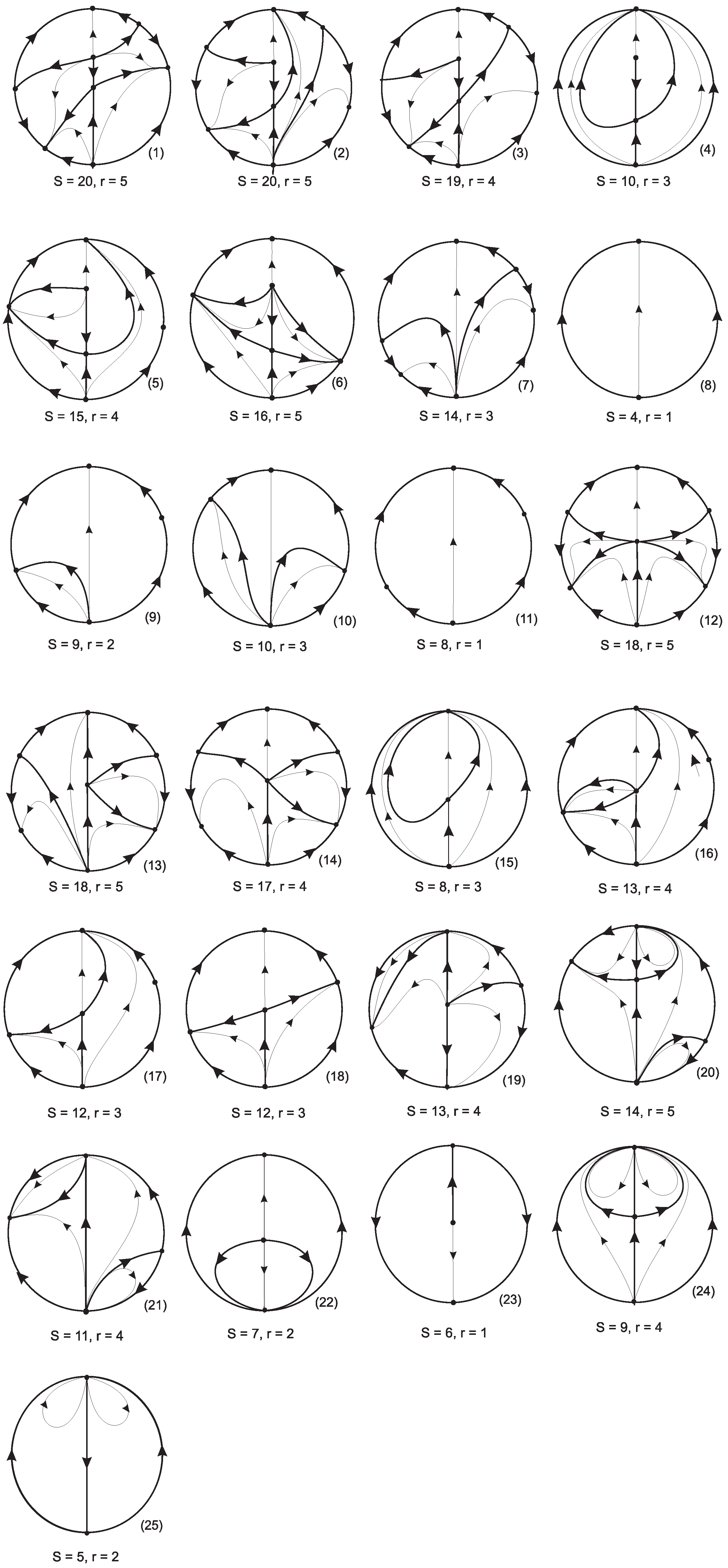
- The family of quadratic systems VIII has 25 topologically different phase portraits in the Poincaré disc.
2. Preliminary Definitions
2.1. Equilibrium Points
2.2. Poincaré Compactification
2.3. Phase Portraits on the Poincaré Disc
3. Proof of Statement (a) of Theorem 1
3.1. Finite Equilibrium Points
- (a)
- If , the differential system (2) has two finite equilibria that are semi-hyperbolic saddle-nodes.
- (b)
- If , the differential system (2) has no finite equilibria.
- (c)
- .
- (c.1)
- If , the differential system (2) has one finite equilibrium point p that is a nilpotent saddle-node.
- (c.2)
- .
- (c.2.1)
- (c.2.2)
- (c.2.3)
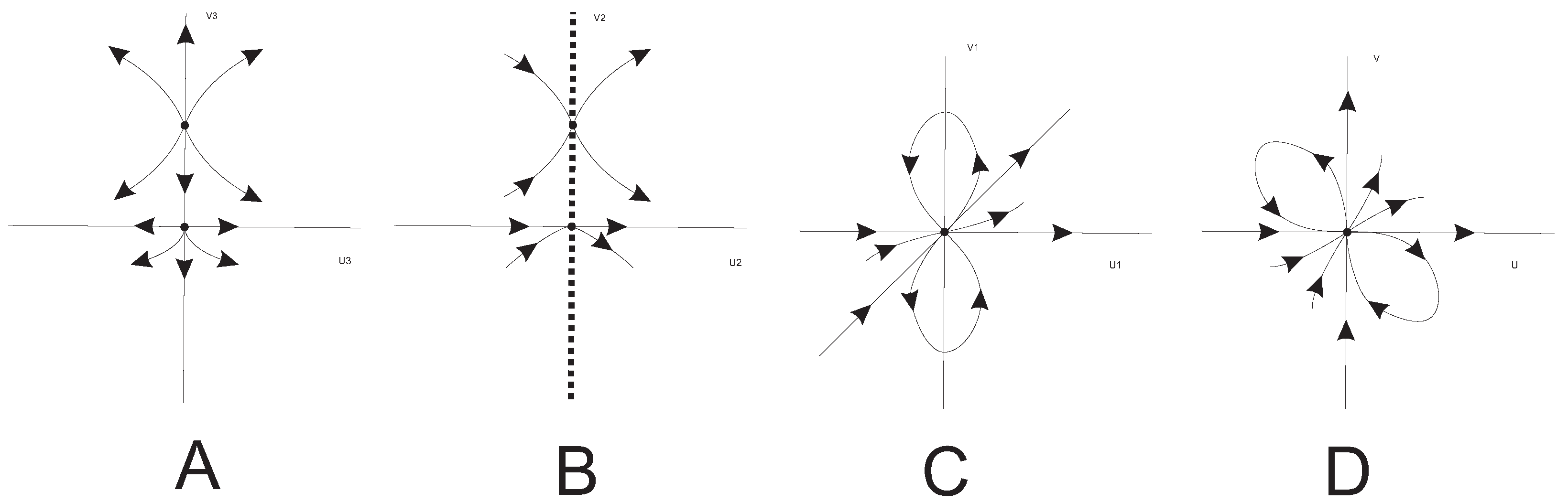
3.2. The Infinite Equilibrium Points in Chart U1
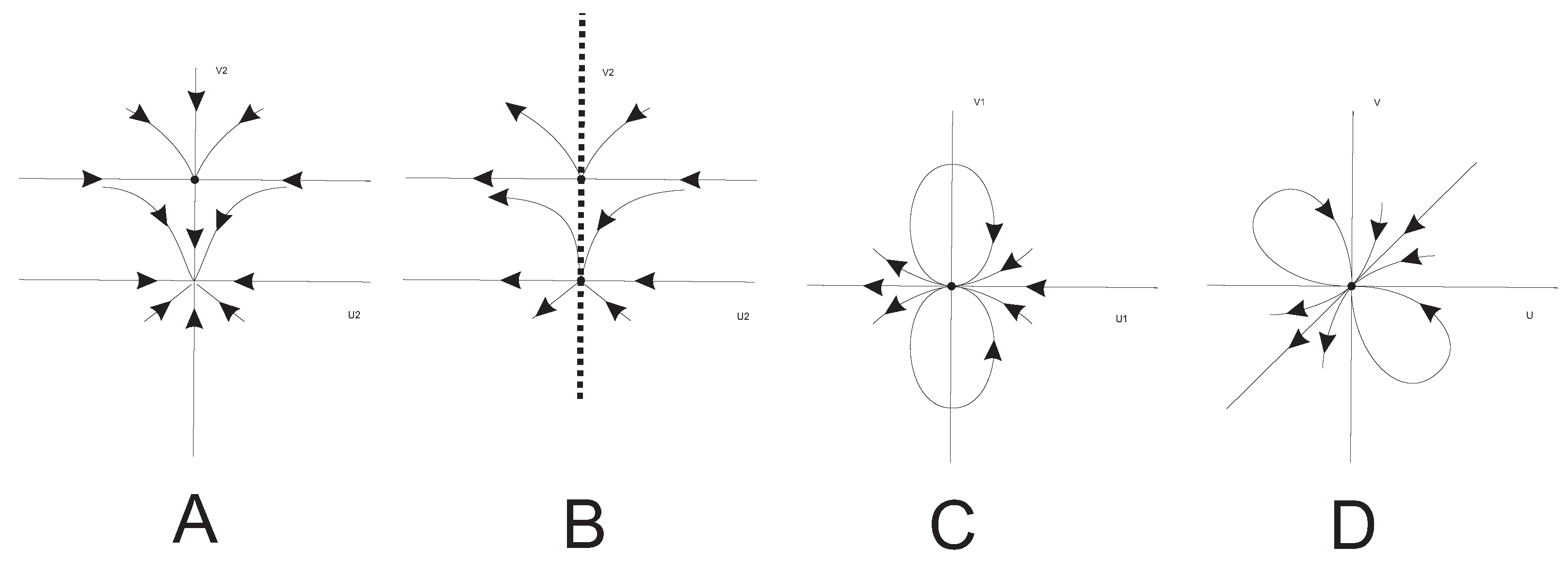
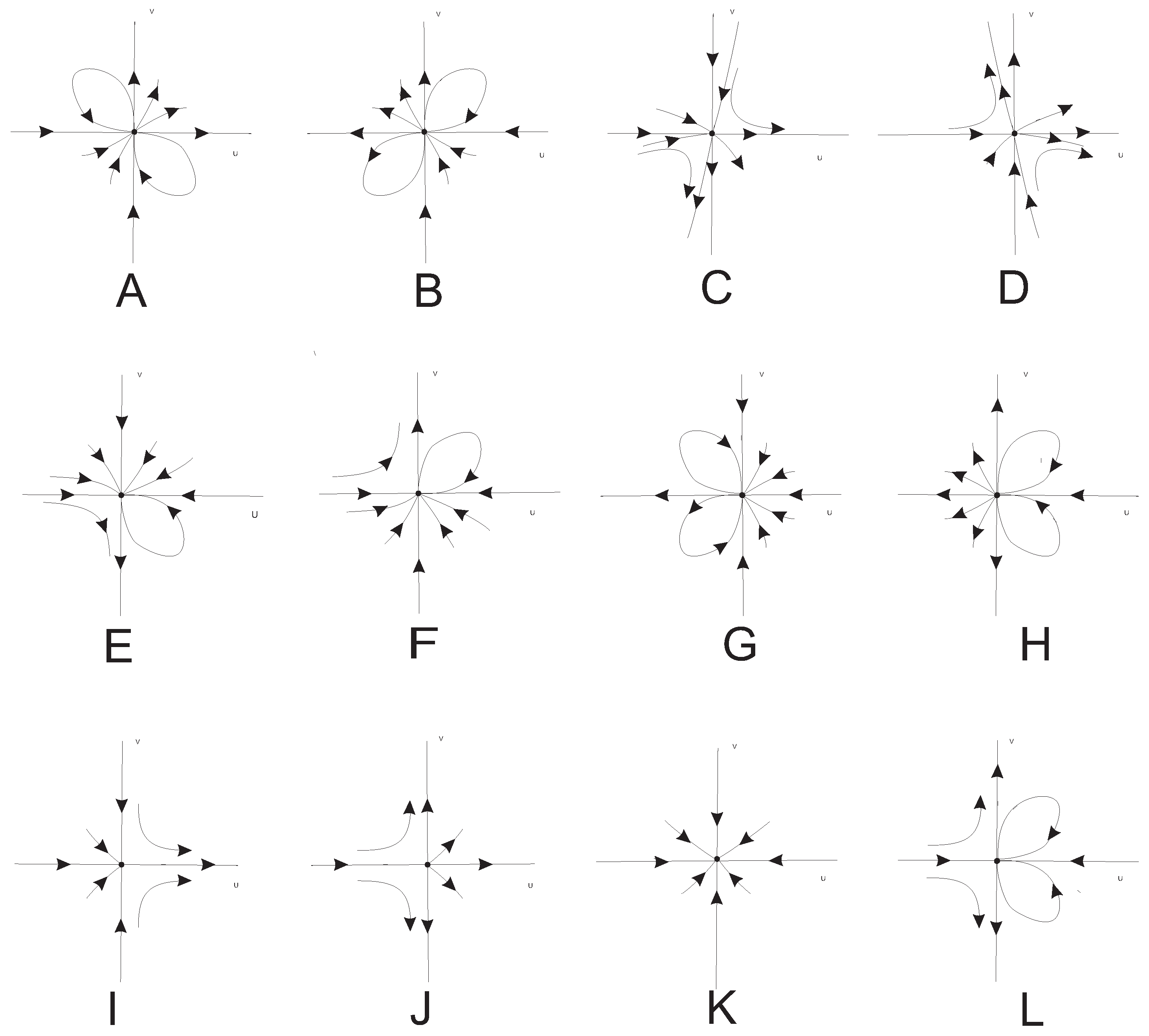
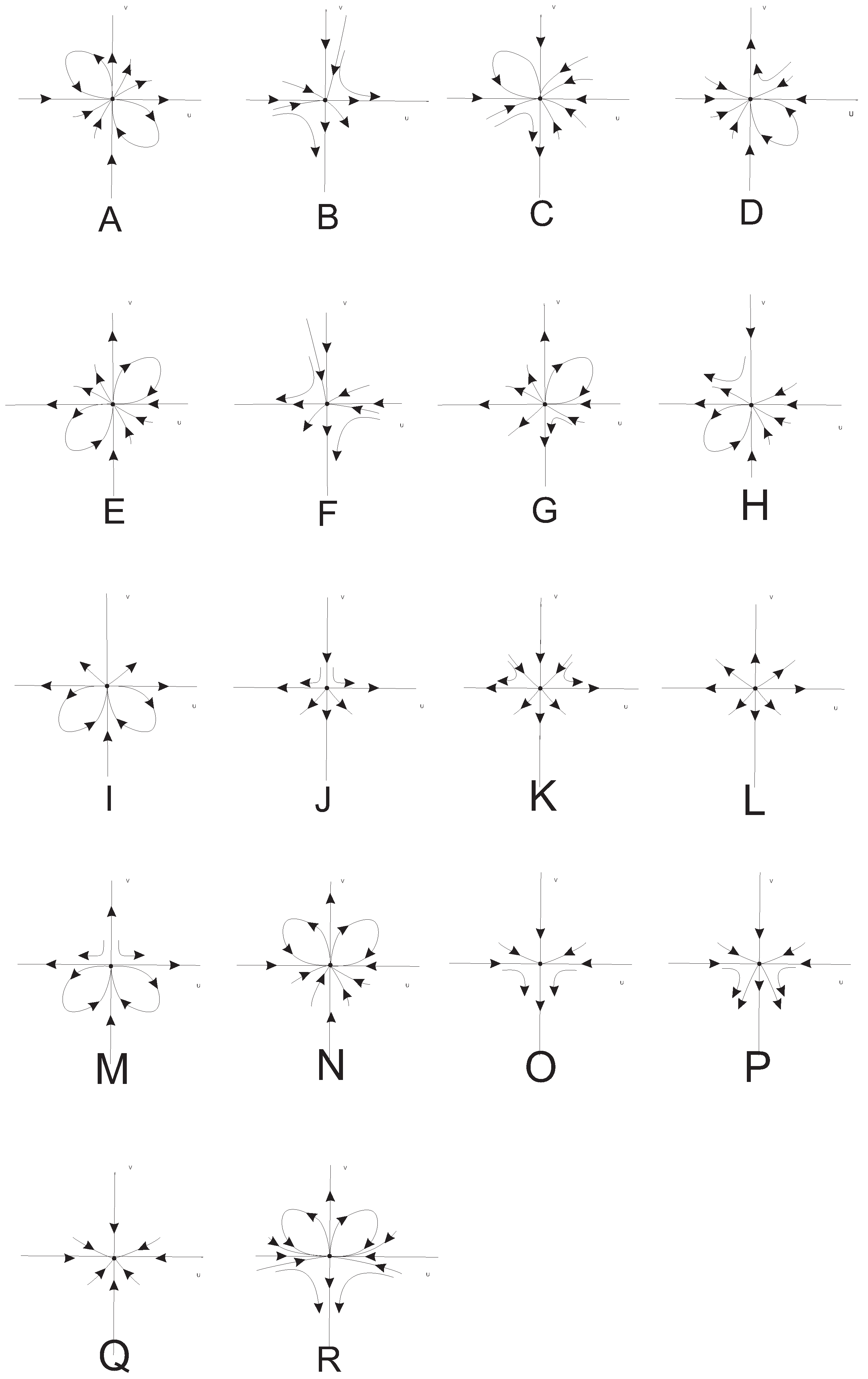
3.3. The Infinite Equilibrium Point at the Origin of Chart U2
- , and in Figure 5A;
- , and in Figure 5B;
- , and in Figure 5C;
- , and in Figure 5D;
- , , and in Figure 5E;
- , , and , then is a straight line of the equilibrium points;
- , , and in Figure 5F;
- , , and , then is a straight line of the equilibrium points;
- , , and in Figure 5G;
- , , and in Figure 5H;
- , , and in Figure 5I;
- , , and in Figure 5J;
- , , and in Figure 5K;
- , , and in Figure 5L;
- , and , then is a straight line of the equilibrium points.
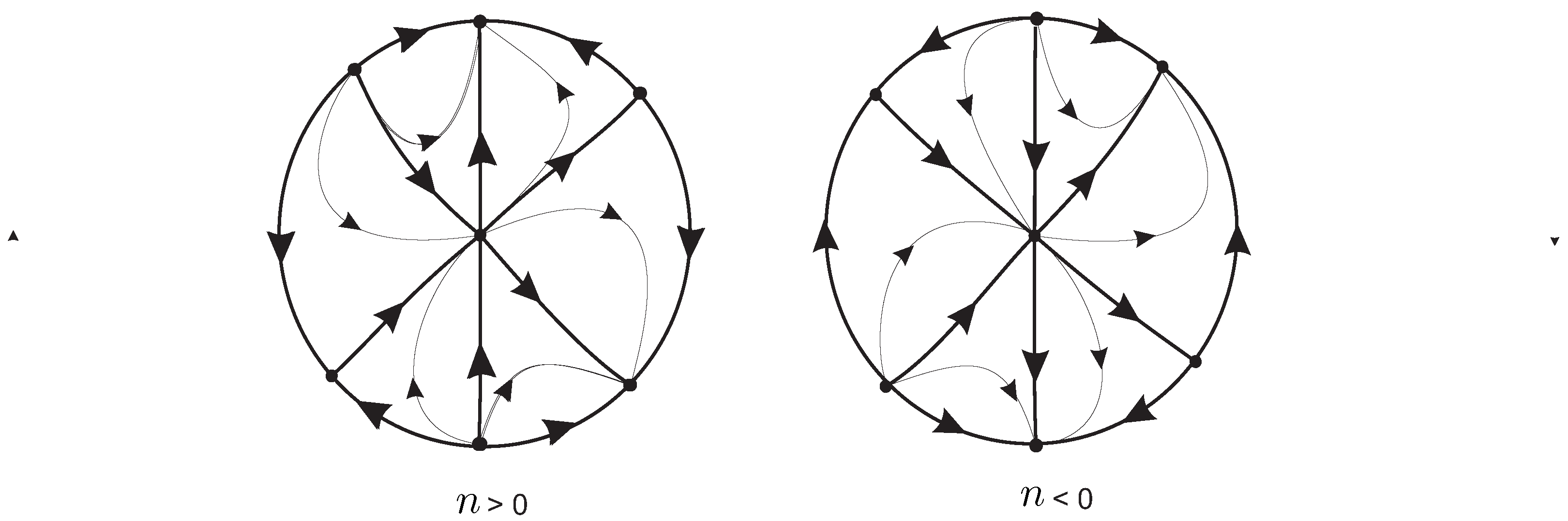
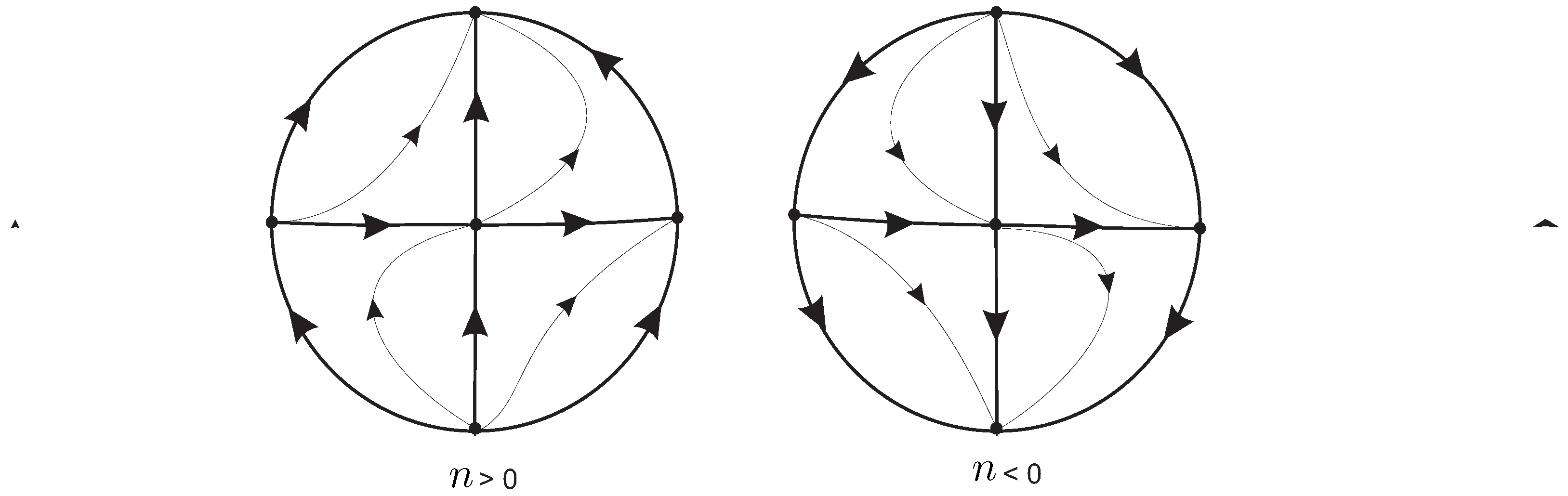
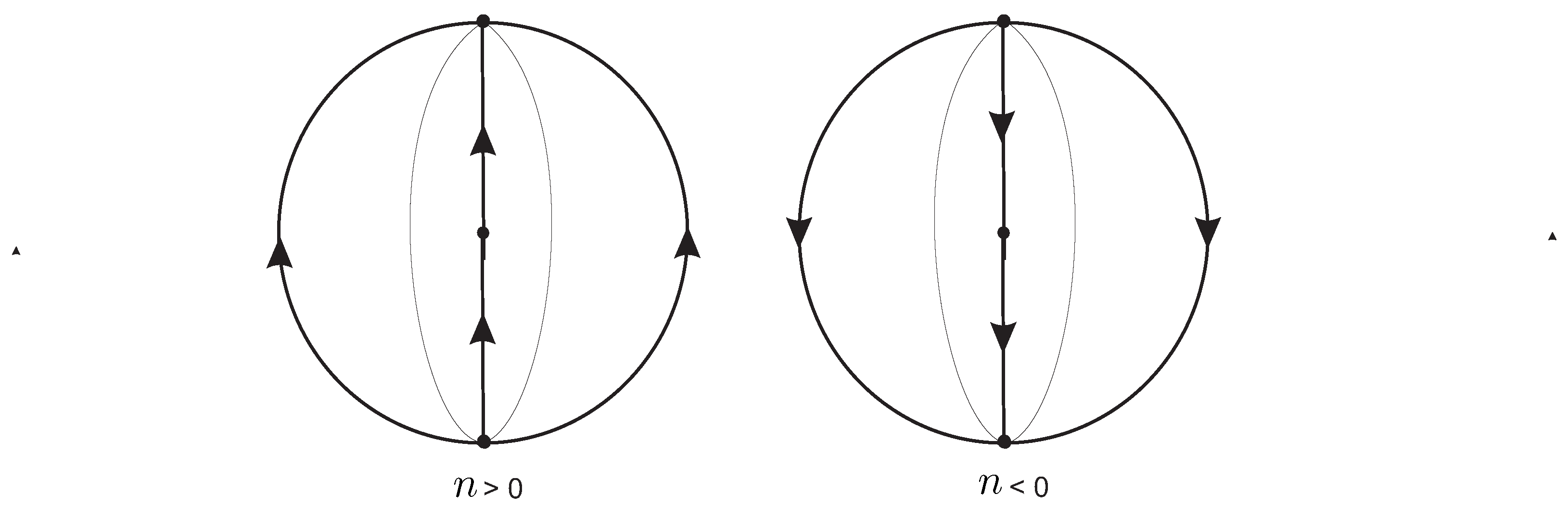
3.4. The Global Phase Portraits
- , and from Figure 7(5);
- , and in Figure 7(6–8);
- , , and in Figure 7(9);
- , , and in Figure 7(10);
- , , in Figure 7(11);
- , , and from Figure 7(12,13);
- , , and in Figure 7(14,15);
- , , in Figure 7(16–20).


- , , , and in Figure 7(24); The cases with are symmetric with respect to the origins of coordinates of all the preceding cases.
- , , and in Figure 7(25); The cases with are symmetric with respect to the origins of coordinates of all the preceding cases.
- , , and in Figure 7(26);
- , , and in Figure 7(27).
4. Proof of Statement (b) Theorem 1
4.1. Finite Equilibrium Points
4.2. The Infinite Equilibrium Points in Chart
4.3. The Infinite Equilibrium Point at the Origin of Chart
- , and in Figure 9B;
- , , , and in Figure 9C;
- , , and , in Figure 9D;
- , and in Figure 9E;
- , and in Figure 9F;
- , , and in Figure 9G;
- , , and in Figure 9H;
- , , and in Figure 9I;
- , , and in Figure 9J;
- , , and in Figure 9K;
- , , , and in Figure 9L;
- , , , and in Figure 9M;
- , , , and in Figure 9N;
- , , and in Figure 9O;
- , , and in Figure 9P;
- , , , and in Figure 9Q;
- , , , and in Figure 9R.
4.4. The Global Phase Portraits
- (i)
- , , and ;
- (ii)
- , , , and ;
- (iii)
- , , , and ;
- (iv)
- , , and ;
- (v)
- , , , and ;
- (vi)
- , , , and ;
- (vii)
- , , and ;
- (viii)
- , , , and ;
- (ix)
- , , , and ;
- (x)
- , , and ;
- (xi)
- , , , and ;
- (xii)
- , , , and ;
- (xiii)
- , , and ;
- (xiv)
- , , , and ;
- (xv)
- , , , and .
- , , and in Figure 11(4);
- , , , and in Figure 11(5);
- , , , and , in this case, the phase portrait is symmetric with respect to the straight line of the phase portrait of the previous case;
- , , , and in Figure 11(6);
- , , and in Figure 11(7);
- , , and in Figure 11(8);
- , , , and in Figure 11(9);
- , , , and ; this case is a symmetric phase portrait with respect to the straight line of the previous phase phase portrait;
- , , , and in Figure 11(10,11);
- , , and from Figure 11(12–14);
- , , and in Figure 11(15);
- , , and in Figure 11(16,17);
- , , , and in Figure 11(18); The cases with are symmetric with respect to the straight line in all preceding cases;
- , in Figure 11(19);
- , in Figure 11(20);
- , , and in Figure 11(21);
- , , and ; this case has a symmetric phase portrait with respect to in the previous case; Phase portraits of cases and are symmetric with respect to the straight line
- of the phase portraits of cases and
- , , and in Figure 11(22);
- , , and ; this case has a symmetric phase portrait with respect to the axis;
- , , and in Figure 11(23);
- , , and in Figure 11(24);
- , , and ; the phase portrait of this case is symmetric with respect to the straight line in the previous phase portrait;
- , , , and in Figure 11(25);
- , , , and ; the phase portrait of this case is symmetric with respect to the straight line in the previous phase portrait;
- , , , and ; this case has the same phase portrait as Figure 11(8);
- , , , and ; this case has the symmetric phase portrait with respect to the straight line in the phase portrait of Figure 11(8).
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Coppel, W.A. A Survey of Quadratic Systems. J. Differ. Equ. 1966, 2, 293–304. [Google Scholar] [CrossRef]
- Büchel, W. Zur topologie der durch eine gewöhnliche differentialgleichung erster ordnung und ersten grades definierten kurvenschar. Mitteil. Math. Gesellsch. Hambg. 1904, 4, 33–68. [Google Scholar]
- Chicone, C.; Tian, J. On general properties of quadratic systems. Am. Math. Mon. 1982, 89, 167–178. [Google Scholar] [CrossRef]
- Artés, J.C.; Llibre, J.; Schlomiuk, D.; Vulpe, N. Geometric Configurations of Singularities of Planar Polynomial Differential Systems. A Global Classification in the Quadratic Case; Birkhäuser: Basel, Switzerland, 2021. [Google Scholar]
- Reyn, J. Phase Portraits of Planar Quadratic Systems; Mathematics and Its Applications; Springer: Berlin/Heidelberg, Germany, 2007; Volume 583. [Google Scholar]
- Ye, Y.; Cai, S.L. Theory of Limit Cycles; Transl. Math. Monogr.; American Mathematical Soc.: Providence, RI, USA, 1986; Volume 66. [Google Scholar]
- Gasull, A.; Li-Ren, S.; Llibre, J. Chordal quadratic systems. Rocky Mt. J. Math. 1986, 16, 751–782. [Google Scholar] [CrossRef]
- Dumortier, F.; Llibre, J.; Artés, J.C. Qualitative Theory of Planar Differential Systems; Universitext; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Álvarez, M.J.; Ferragud, A.; Jarque, X. A survey on the blow up technique. Int. J. Bifur. Chaos 2011, 21, 3103–3118. [Google Scholar] [CrossRef]
- González, E.A. Generic properties of polynomial vector fields at infinity. Trans. Am. Math. Soc. 1969, 143, 201–222. [Google Scholar] [CrossRef]
- Neumann, D. Classification of continuous flows on 2-manifolds. Proc. Am. Math. Soc. 1975, 48, 73–81. [Google Scholar] [CrossRef]
- Markus, L. Quadratic differential equations and non-associative algebras. Ann. Math. Stud. 1960, 45, 185–213. [Google Scholar]
- Peixoto, L.M.M. Dynamical Systems; University of Bahia–Acad. Press: New York, NY, USA, 1973; pp. 389–420. [Google Scholar]
- Date, T. Classification and analysis of two-dimensional real homogeneous quadratic differential equation systems. J. Differ. Equ. 1979, 21, 311–334. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| s | 4 | 5 | 6 | 8 | 9 | 9 | 10 | 11 | 12 |
| r | 1 | 2 | 2 | 3 | 4 | 2 | 3 | 4 | 3 |
| p.p. | 10 | 26, 27 | 14 | 15 | 23 | 25 | 11, 24 | 5 | 18, 22 |
| s | 13 | 14 | 14 | 16 | 17 | 18 | 19 | 20 | 21 |
| r | 4 | 3 | 5 | 5 | 6 | 5 | 6 | 5 | 6 |
| p.p. | 16, 19, 20 | 9 | 17, 21 | 8 | 6, 7 | 13 | 12 | 2 | 1, 3, 4 |
| s | 4 | 5 | 6 | 7 | 8 | 8 | 9 | 9 | 10 | 11 |
| r | 1 | 2 | 1 | 2 | 1 | 3 | 2 | 4 | 3 | 4 |
| p.p. | 8 | 25 | 23 | 22 | 11 | 15 | 9 | 24 | 4, 10 | 21 |
| s | 12 | 13 | 14 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| r | 3 | 4 | 3 | 5 | 4 | 5 | 4 | 5 | 4 | 5 |
| p.p. | 17, 18 | 16, 19 | 7 | 20 | 5 | 6 | 14 | 12, 13 | 3 | 1, 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cairó, L.; Llibre, J. Phase Portraits of Families VII and VIII of the Quadratic Systems. Axioms 2023, 12, 756. https://doi.org/10.3390/axioms12080756
Cairó L, Llibre J. Phase Portraits of Families VII and VIII of the Quadratic Systems. Axioms. 2023; 12(8):756. https://doi.org/10.3390/axioms12080756
Chicago/Turabian StyleCairó, Laurent, and Jaume Llibre. 2023. "Phase Portraits of Families VII and VIII of the Quadratic Systems" Axioms 12, no. 8: 756. https://doi.org/10.3390/axioms12080756
APA StyleCairó, L., & Llibre, J. (2023). Phase Portraits of Families VII and VIII of the Quadratic Systems. Axioms, 12(8), 756. https://doi.org/10.3390/axioms12080756