Collocation Methods for Volterra Integral and Integro-Differential Equations: A Review


Abstract
:1. Introduction
2. One Step Collocation Methods for VIES
2.1. Exact One-Step Collocation Methods
2.2. Discretized One-Step Collocation Methods
3. Multistep Collocation Methods for VIEs
3.1. Exact Multistep Collocation
- i.
- the given functions describing the VIE (1) satisfy , .
- ii.
- the starting error is .
- iii.
- , whereand ρ denotes the spectral radius.
- the hypothesis of the Theorem 1 hold with .
- the collocation parameters are the solution of the systemwith
3.2. Discretized Multistep Collocation
- the hypothesis of the Theorem 3 hold with .
- the collocation parameters are the solution of the system (17).
4. Two Step Almost Collocation Collocation Methods for VIEs
4.1. Diagonally Implicit TSAC Methods for VIEs
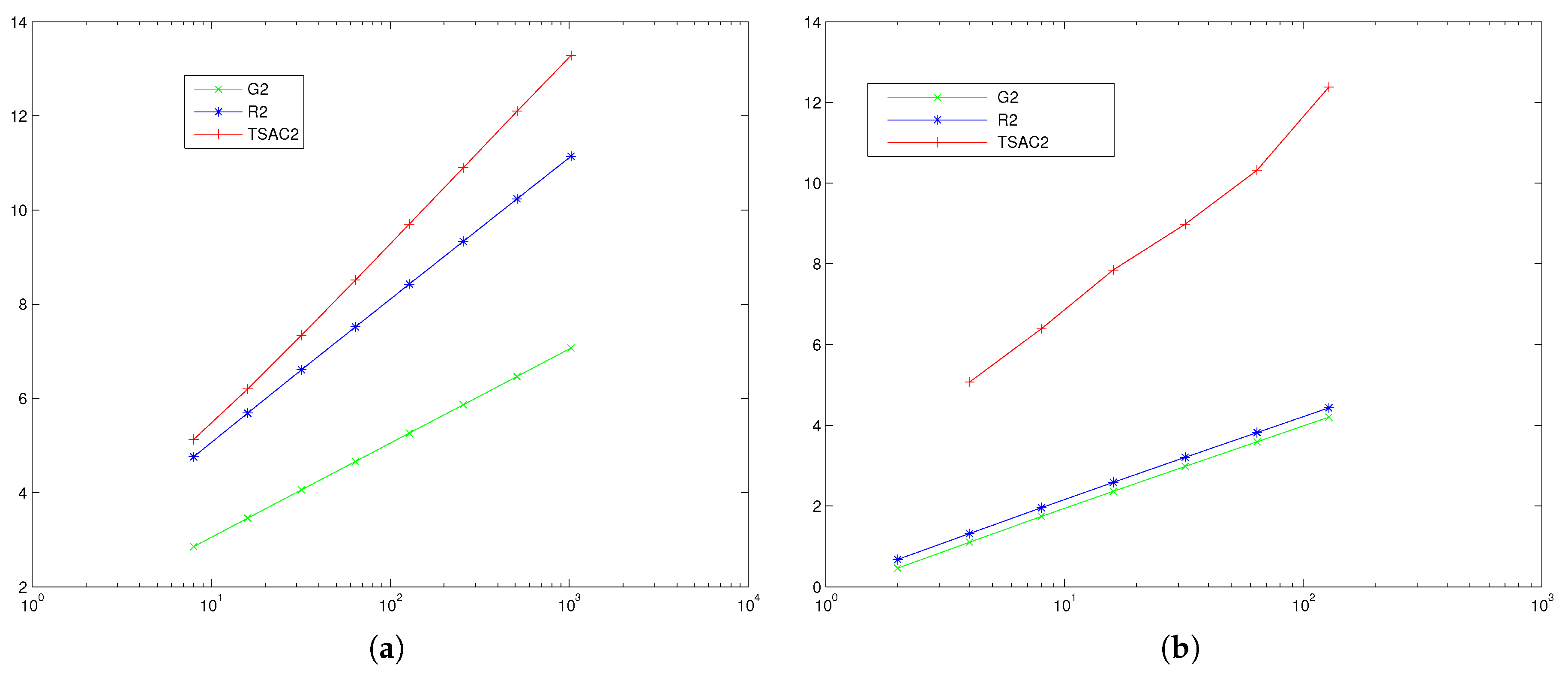
4.2. Numerical Results
- the non stiff VIEwith exact solution ;
- the stiff VIEwith and exact solution . This is a stiff problem because it is equivalent to the Prothero-Robinson problem for ODEs.
- G2: 1 point Gauss collocation, ;
- R2: 2 points Radau collocation, ;
- TSAC2: 2 points TSAC method, .
5. One-Step Collocation Methods for VIDEs
5.1. Exact One-Step Collocation Methods
5.2. Discretized One-Step Collocation Methods
6. Multistep Collocation for VIDEs
6.1. Exact Multistep Collocation
6.2. Discretized Multistep Collocation
6.3. Convergence Analysis
- and and have bounded derivatives with respect to y;
- the starting error satisfies , for any .
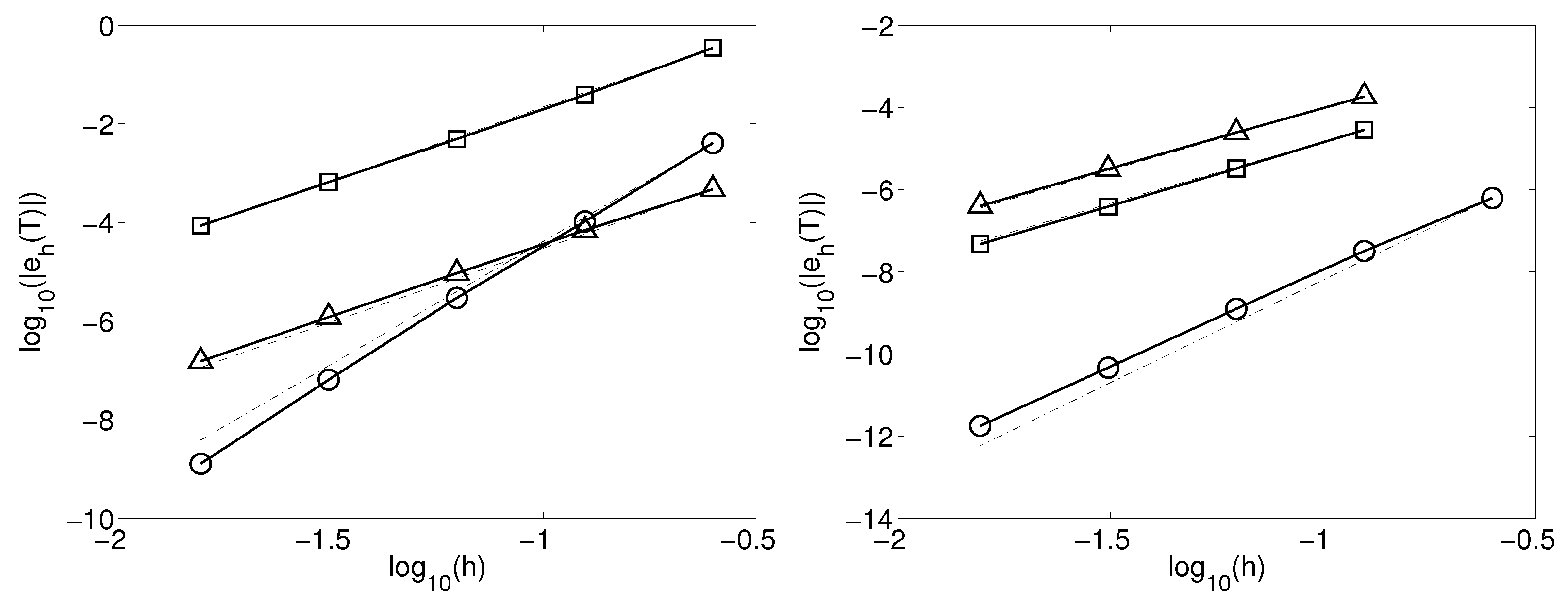
6.4. Numerical Results
- TS3: superconvergent discretized two-step collocation method, with and , with order ;
- TS3b: two-step discretized collocation method, with and , , , with uniform order 3;
- TS5: superconvergent discretized two-step collocation method, with and , with order .
7. Conclusions
Funding
Conflicts of Interest
References
- Bonaccorsi, S.; Fantozzi, M. Volterra Integro-Differential Equations with Accretive Operators and Non-Autonomous Perturbations. J. Integral Equ. Appl. 2006, 18, 437–470. [Google Scholar] [CrossRef] [Green Version]
- Brunner, H. Collocation Methods for Volterra Integral and Related Functional Equations; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Brunner, H.; van der Houwen, P.J. The Numerical Solution of Volterra Equations; CWI Monographs, 3; Elsevier Science Ltd.: Amsterdam, The Netherlands, 1986. [Google Scholar]
- Hoppensteadt, F.C.; Jackiewicz, Z.; Zubik-Kowal, B. Numerical solution of Volterra integral and integro-differential equations with rapidly vanishing convolution kernels. BIT Numer. Math. 2007, 47, 325–350. [Google Scholar] [CrossRef]
- Hrusa, W.J.; Renardy, M. A model problem in one-dimensional viscoelasticity with a singular kernel. In Volterra Integrodifferential Equations in Banach Spaces and Applications; Pitman Research Notes in Mathematics; da Prato, G., Iannelli, M., Eds.; Longman Scientific & Technical: Harlow, UK; Wiley: New York, NY, USA, 1989; Volume 190, pp. 221–230. [Google Scholar]
- Nohel, J.A.; Rogers, R.C.; Tzavaras, A.E. Hyperbolic conservation laws in viscoelasticity. In Volterra Integro Differential Equations in Banach Spaces and Applications; Da Prato, G., Iannelli, M., Eds.; Pitman Research Notes in Mathematics Series, 190; Longman Science Technology: Harlow, UK, 1989; pp. 320–338. [Google Scholar]
- Coleman, J.P.; Duxbury, S.C. Mixed collocation methods for y = f(x,y). J. Comput. Appl. Math. 2000, 126, 47–75. [Google Scholar] [CrossRef]
- Brunner, H.; Makroglou, A.; Miller, R.K. Mixed interpolation collocation methods for first and second order Volterra integro-differential equations with periodic solution. Appl. Numer. Math. 1997, 23, 381–402. [Google Scholar] [CrossRef]
- Braś, M.; Cardone, A.; Jackiewicz, Z.; Welfert, B. Order reduction phenomenon for general linear methods. J. Comput. Appl. Math. 2015, 290, 44–64. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 2nd ed.; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations. II. In Springer Series in Computational Mathematics; Springer: Berlin, Germany, 1991; Volume 14. [Google Scholar]
- D’Ambrosio, R.; Paternoster, B. Two-step modified collocation methods with structured coefficient matrices for ordinary differential equations. Appl. Numer. Math. 2012, 62, 1325–1334. [Google Scholar] [CrossRef]
- Capobianco, G.; Conte, D.; Paternoster, B. Construction and implementation of two-step continuous methods for Volterra Integral Equations. Appl. Numer. Math 2017, 119, 239–247. [Google Scholar] [CrossRef]
- Cardone, A.; Conte, D. Multistep collocation methods for Volterra integro-differential equations. Appl. Math. Comput. 2013, 221, 770–785. [Google Scholar] [CrossRef]
- Cardone, A.; Conte, D.; Paternoster, B. A family of multistep collocation methods for Volterra integro-differential equations. AIP Conf. Proc. 2009, 1168, 358–361. [Google Scholar] [CrossRef]
- Conte, D.; Paternoster, B. Multistep collocation methods for Volterra Integral Equations. Appl. Numer. Math. 2009, 59, 1721–1736. [Google Scholar] [CrossRef]
- Conte, D.; D’Ambrosio, R.; Paternoster, B. Two-step diagonally-implicit collocation-based methods for Volterra Integral Equations. Appl. Numer. Math. 2012, 62, 1312–1324. [Google Scholar] [CrossRef]
- Conte, D.; Jackiewicz, Z.; Paternoster, B. Two-step almost collocation methods for Volterra integral equations. Appl. Math. Comput. 2008, 204, 839–853. [Google Scholar] [CrossRef]
- Guillou, A.; Soulé, J.L. La résolution numérique des problèmes différentiels aux conditions initiales par des méthodes de collocation. Rev. Fr. Inform. Rech. Opér. 1969, 3, 17–44. [Google Scholar] [CrossRef] [Green Version]
- Lie, I. The stability function for multistep collocation methods. Numer. Math. 1990, 57, 779–787. [Google Scholar] [CrossRef]
- Lie, I.; Nørsett, S. Superconvergence for multistep collocation. Math. Comput. 1989, 52, 65–79. [Google Scholar] [CrossRef]
- Braś, M.; Cardone, A. Construction of Efficient General Linear Methods for Non-Stiff Differential Systems. Math. Model. Anal. 2012, 17, 171–189. [Google Scholar] [CrossRef]
- Braś, M.; Cardone, A.; D’Ambrosio, R. Implementation of explicit Nordsieck methods with inherent quadratic stability. Math. Model. Anal. 2013, 18, 289–307. [Google Scholar] [CrossRef]
- Jackiewicz, Z. General Linear Methods for Ordinary Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Darania, P. Superconvergence analysis of multistep collocation method for delay Volterra integral equations. Comput. Methods Differ. Equ. 2016, 4, 205–216. [Google Scholar]
- Darania, P.; Pishbin, S. High-order collocation methods for nonlinear delay integral equation. J. Comput. Appl. Math. 2017, 326, 284–295. [Google Scholar] [CrossRef]
- Fazeli, S.; Hojjati, G. Numerical solution of Volterra integro-differential equations by superimplicit multistep collocation methods. Numer. Algorithms 2015, 68, 741–768. [Google Scholar] [CrossRef]
- Fazeli, S.; Hojjati, G.; Shahmorad, S. Multistep Hermite collocation methods for solving Volterra integral equations. Numer. Algorithms 2012, 60, 27–50. [Google Scholar] [CrossRef]
- Fazeli, S.; Hojjati, G.; Shahmorad, S. Super implicit multistep collocation methods for nonlinear Volterra integral equations. Math. Comput. Model. 2012, 55, 590–607. [Google Scholar] [CrossRef]
- Fazeli, S.; Hojjati, G.; Shahmorad, S. Multistep collocation and iterated multistep collocation methods for solving two-dimensional Volterra integral equations. J. Mod. Methods Numer. Math. 2015, 6, 1–21. [Google Scholar] [CrossRef]
- Ma, J.; Xiang, S. A collocation boundary value method for linear Volterra integral equations. J. Sci. Comput. 2017, 71, 1–20. [Google Scholar] [CrossRef]
- Sheng, C.; Wang, Z.; Guo, B. A multistep Legendre-Gauss spectral collocation method for nonlinear Volterra integral equations. SIAM J. Numer. Anal. 2014, 52, 1953–1980. [Google Scholar] [CrossRef]
- Lopez-Fernandez, M.; Lubich, C.; Schadle, A. Adaptive, fast, and oblivious convolution in evolution equations with memory. SIAM J. Sci. Comput. 2008, 30, 1015–1037. [Google Scholar] [CrossRef]
- Lopez-Fernandez, M.; Lubich, C.; Schadle, A. Fast and oblivious convolution quadrature. SIAM J. Sci. Comput. 2006, 28, 421–438. [Google Scholar]
- Crisci, M.R.; Russo, E.; Vecchio, A. Stability results for one-step discretized collocation methods in the numerical treatment of Volterra integral equations. Math. Comput. 1992, 58, 119–134. [Google Scholar] [CrossRef]
- Crisci, M.R.; Russo, E.; Jackiewicz, Z.; Vecchio, A. Global stability of exact collocation methods for Volterra integro-differential equations. Atti Sem. Mat. Fis. Univ. Modena 1991, 39, 527–536. [Google Scholar]
- Crisci, M.R.; Russo, E.; Vecchio, A. Stability of Collocation Methods for Volterra Integro-Differential Equations. J. Integral Equ. Appl. 1992, 4, 491–507. [Google Scholar] [CrossRef]
- Cardone, A.; Messina, E.; Vecchio, A. An adaptive method for Volterra–Fredholm integral equations on the half line. J. Comput. Appl. Math. 2009, 228, 538–547. [Google Scholar] [CrossRef]
- Conte, D.; D’Ambrosio, R.; Paternoster, B. GPU acceleration of waveform relaxation methods for large differential systems. Numer. Algorithms 2016, 71, 293–310. [Google Scholar] [CrossRef]
- Conte, D.; Paternoster, B. Parallel methods for weakly singular Volterra Integral Equations on GPUs. Appl. Numer. Math. 2017, 114, 30–37. [Google Scholar] [CrossRef]
- Cardone, A.; Jackiewicz, Z.; Sandu, A.; Zhang, H. Extrapolated Implicit-Explicit Runge-Kutta Methods. Math. Model. Anal. 2014, 19, 18–43. [Google Scholar] [CrossRef]
- Conte, D.; D’Ambrosio, R.; Jackiewicz, Z.; Paternoster, B. A practical approach for the derivation of two-step Runge-Kutta methods. Math. Model. Anal. 2012, 17, 65–77. [Google Scholar] [CrossRef]
- Conte, D.; D’Ambrosio, R.; Jackiewicz, Z.; Paternoster, B. Numerical search for algebraically stable two-step continuous Runge-Kutta methods. J. Comput. Appl. Math. 2013, 239, 304–321. [Google Scholar] [CrossRef]
- Cardone, A.; Conte, D.; Paternoster, B. Two-step collocation methods for fractional differential equations. Discret. Contin. Dyn. Syst. Ser. B 2017, 22, 1–17. [Google Scholar] [CrossRef]
- Burrage, K.; Cardone, A.; D’Ambrosio, R.; Paternoster, B. Numerical solution of time fractional diffusion systems. Appl. Numer. Math. 2017, 116, 82–94. [Google Scholar] [CrossRef]
- Conte, D.; Paternoster, B. Modified Gauss-Laguerre exponential fitting based formulae. J. Sci. Comput. 2016, 69, 227–243. [Google Scholar] [CrossRef]
- Ixaru, L.G.; Paternoster, B. A Gauss quadrature rule for oscillatory integrands. Comput. Phys. Commun. 2001, 133, 177–188. [Google Scholar] [CrossRef]
- Cardone, A.; D’Ambrosio, R.; Paternoster, B. High order exponentially fitted methods for Volterra integral equations with periodic solution. Appl. Numer. Math. 2017, 114, 18–29. [Google Scholar] [CrossRef]
- Cardone, A.; Ixaru, L.G.; Paternoster, B.; Santomauro, G. Ef-Gaussian direct quadrature methods for Volterra integral equations with periodic solution. Math. Comput. Simul. 2015, 110, 125–143. [Google Scholar] [CrossRef]
- Cardone, A.; D’Ambrosio, R.; Paternoster, B. Exponentially fitted IMEX methods for advection—Diffusion problems. J. Comput. Appl. Math. 2017, 316, 100–108. [Google Scholar] [CrossRef]
- D’Ambrosio, R.; Moccaldi, M.; Paternoster, B. Adapted numerical methods for advection-reaction-diffusion problems generating periodic wavefronts. Comput. Math. Appl. 2017, 74, 1029–1042. [Google Scholar] [CrossRef]
- D’Ambrosio, R.; Paternoster, B. Numerical solution of reaction–diffusion systems of λ − ω type by trigonometrically fitted methods. J. Comput. Appl. Math. 2016, 294, 436–445. [Google Scholar] [CrossRef]
- D’Ambrosio, R.; De Martino, G.; Paternoster, B. General Nystrom methods in Nordsieck form: Error analysis. J. Comput. Appl. Math. 2016, 292, 694–702. [Google Scholar] [CrossRef]
- Butcher, J.; D’Ambrosio, R. Partitioned general linear methods for separable Hamiltonian problems. Appl. Numer. Math. 2017, 117, 69–86. [Google Scholar] [CrossRef]
- Muftahov, I.; Tynda, A.; Sidorov, D. Numeric solution of Volterra integral equations of the first kind with discontinuous kernels. J. Comput. Appl. Math. 2017, 313, 119–128. [Google Scholar] [CrossRef]
- Sidorov, D.N. On parametric families of solutions of Volterra integral equations of the first kind with piecewise smooth kernel. Differ. Equ. 2013, 49, 210–216. [Google Scholar] [CrossRef]
- Boykov, I.V.; Tynda, A.N. Numerical methods of optimal accuracy for weakly singular Volterra integral equations. Ann. Funct. Anal. 2015, 6, 114–133. [Google Scholar] [CrossRef] [Green Version]
- Castro, L.P.; Ramos, A. Hyers–Ulam–Rassias stability for a class of nonlinear Volterra integral equations. Banach J. Math. Anal. 2009, 3, 36–43. [Google Scholar] [CrossRef]
- Brzdek, J.; Eghbali, N. On approximate solutions of some delayed fractional differential equations. Appl. Math. Lett. 2016, 54, 31–35. [Google Scholar] [CrossRef]
- Bahyrycz, A.; Brzdek, J.; Lesniak, Z. On approximate solutions of the generalized Volterra integral equation. Nonlinear Anal. Real World Appl. 2014, 20, 59–66. [Google Scholar] [CrossRef]
- Gachpazan, M.; Baghani, O. Hyers-Ulam stability of nonlinear integral equation. Fixed Point Theory Appl. 2010, 2010, 927640. [Google Scholar] [CrossRef]
- Jung, S.M. A fixed point approach to the stability of a Volterra integral equation. Fixed Point Theory Appl. 2007, 2007, 057064. [Google Scholar] [CrossRef]
- Morales, J.R.; Rojas, E.M. Hyers–Ulam and Hyers–Ulam–Rassias stability of nonlinear integral equations with delay. Int. J. Nonlinear Anal. Appl. 2011, 2, 1–7. [Google Scholar]
- Kythy, P.K.; Puri, P. Computational Methods for Linear Integral Equations; Birkhauser: Boston, MA, USA, 2002. [Google Scholar]
- Muftahov, I.R.; Sidorov, D.N.; Sidorov, N.A. Lavrentiev regularization of integral equations of the first kind in the space of continuous functions. Izvestiya Irkutskogo Gosudarstvennogo Universiteta 2016, 15, 62–77. [Google Scholar]
- Muftahov, I.; Sidorov, D.; Zhukov, A.; Panasetsky, D.; Foley, A.; Li, Y.; Tynda, A. Application of Volterra Equations to Solve Unit Commitment Problem of Optimised Energy Storage and Generation. arXiv, 2016; arXiv:1608.05221. [Google Scholar]





{kind=link}
{kind=link}
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardone, A.; Conte, D.; D’Ambrosio, R.; Paternoster, B. Collocation Methods for Volterra Integral and Integro-Differential Equations: A Review. Axioms 2018, 7, 45. https://doi.org/10.3390/axioms7030045
Cardone A, Conte D, D’Ambrosio R, Paternoster B. Collocation Methods for Volterra Integral and Integro-Differential Equations: A Review. Axioms. 2018; 7(3):45. https://doi.org/10.3390/axioms7030045
Chicago/Turabian StyleCardone, Angelamaria, Dajana Conte, Raffaele D’Ambrosio, and Beatrice Paternoster. 2018. "Collocation Methods for Volterra Integral and Integro-Differential Equations: A Review" Axioms 7, no. 3: 45. https://doi.org/10.3390/axioms7030045
APA StyleCardone, A., Conte, D., D’Ambrosio, R., & Paternoster, B. (2018). Collocation Methods for Volterra Integral and Integro-Differential Equations: A Review. Axioms, 7(3), 45. https://doi.org/10.3390/axioms7030045