A Convex Model for Edge-Histogram Specification with Applications to Edge-Preserving Smoothing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Compute the probability density function of I, , , where denotes the intensity values, denotes the number of pixels whose value equals to , and n is the total number of pixels in I.
- With the probability density function , compute the cumulative density function of I.
- With serving as a probability density function, compute the cumulative density function .
- For , replace by , where .
2. Our Model
2.1. Proposed Convex Model
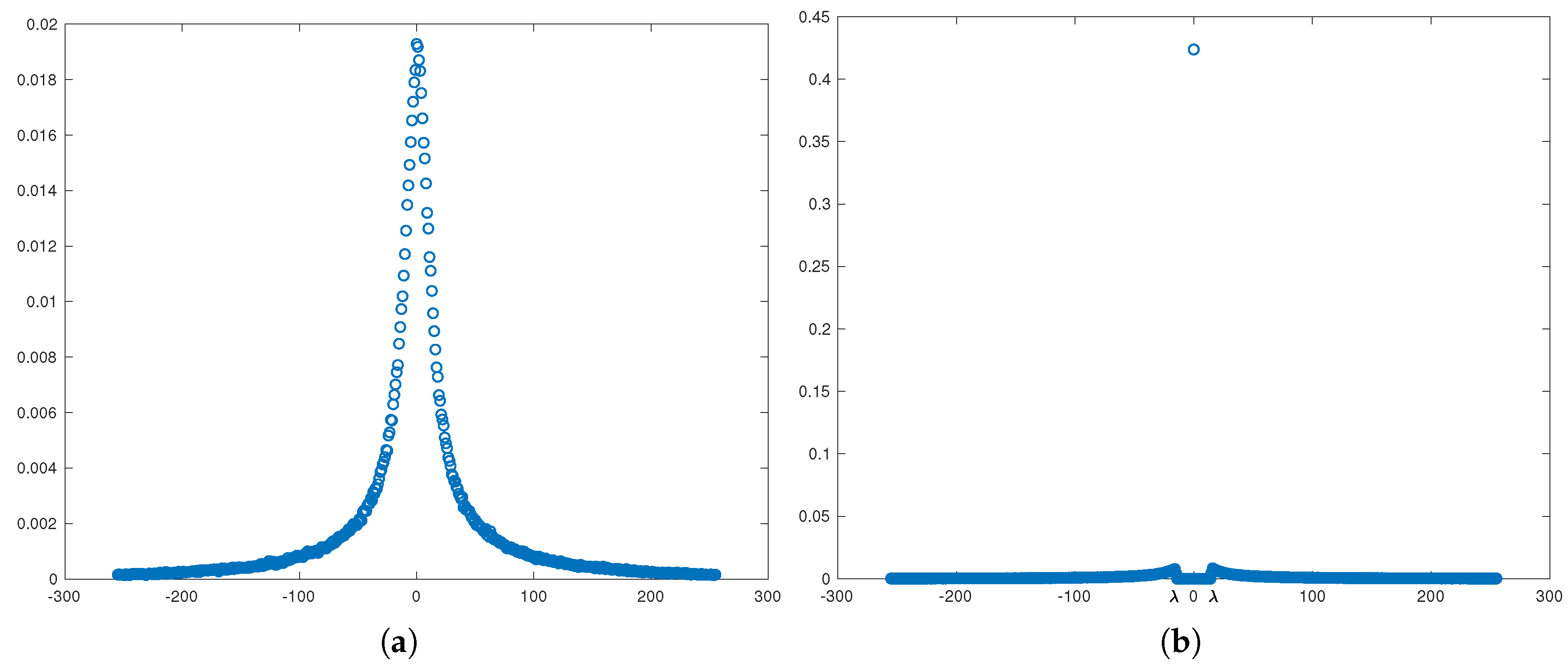
2.2. Construction of Target Edge-Histogram
2.3. Gaussian Smoothing and Iterations
2.4. Convex Set
3. Applications and Comparisons
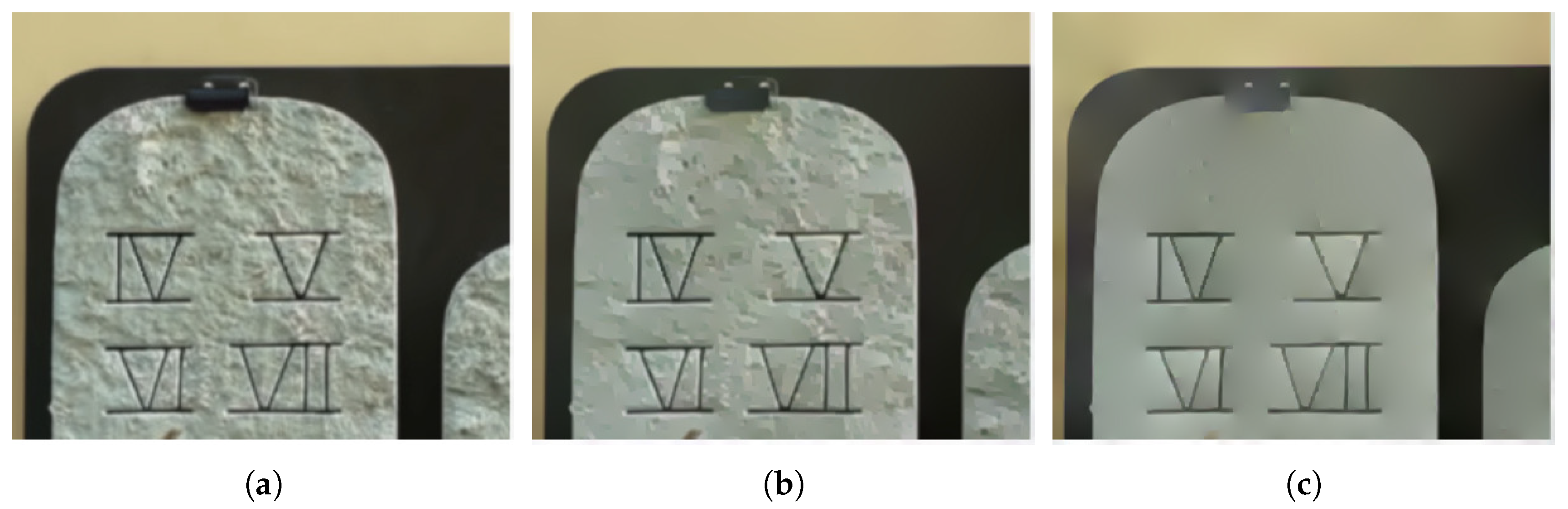
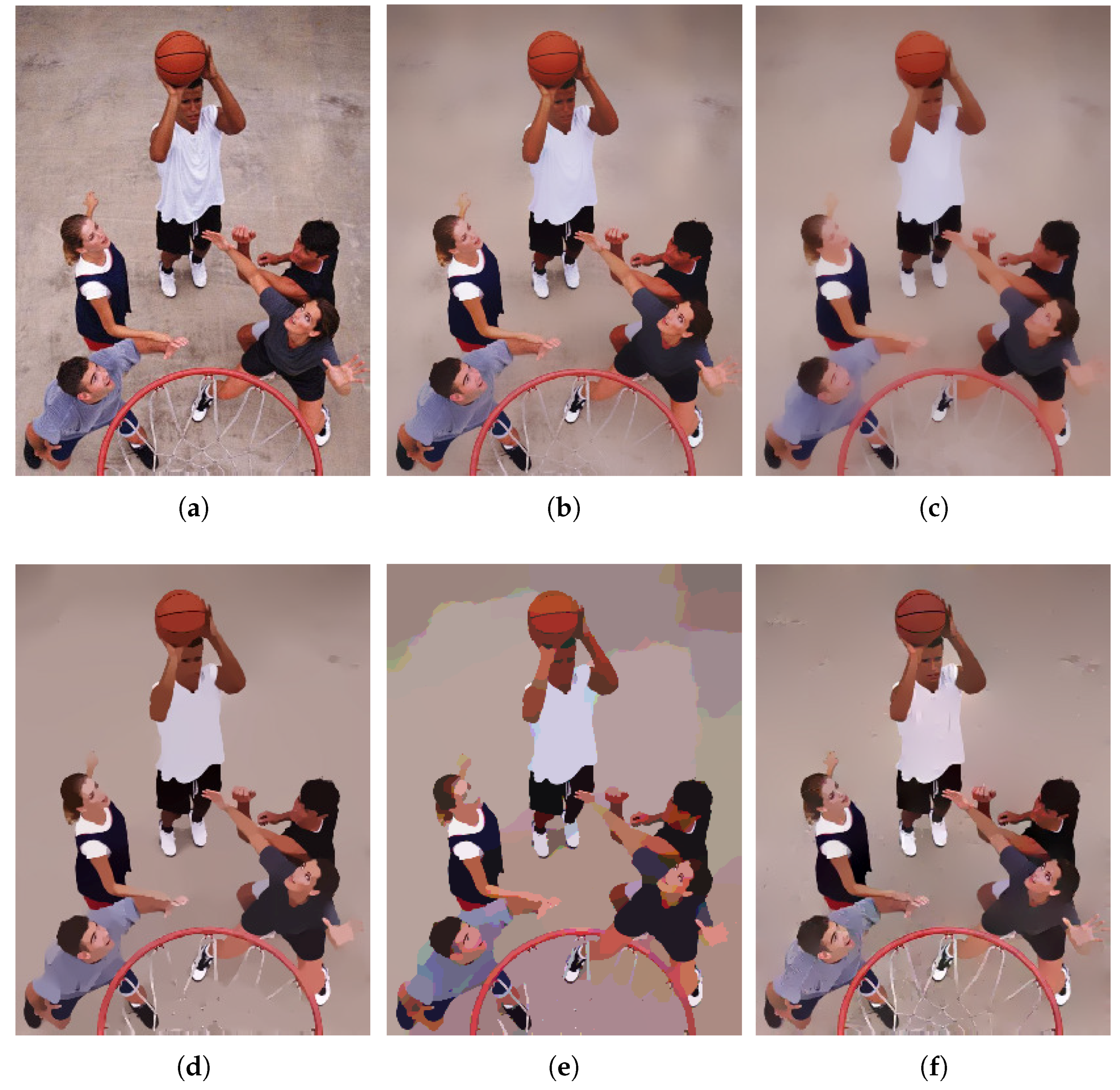
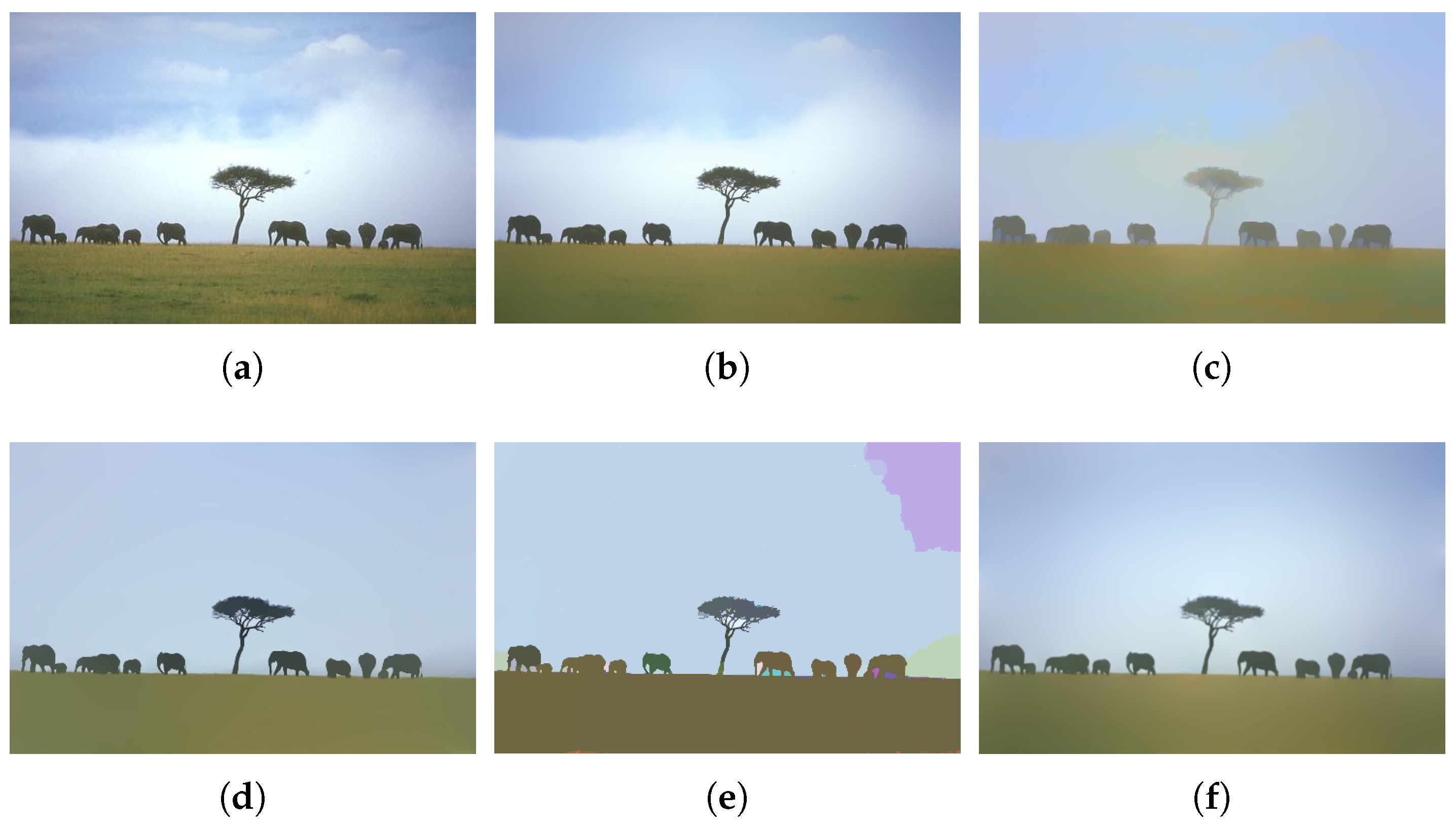
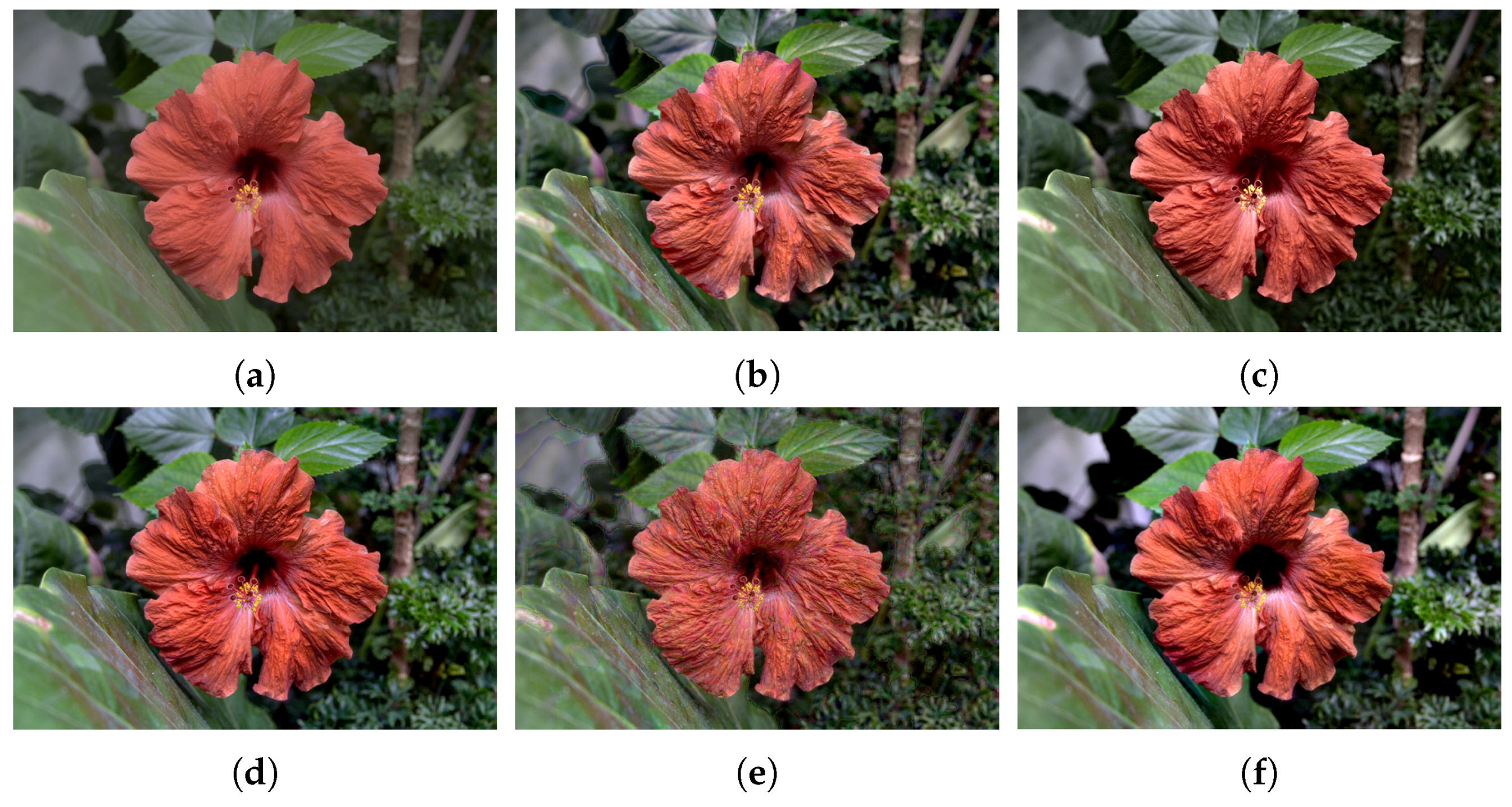
3.1. Image Abstraction
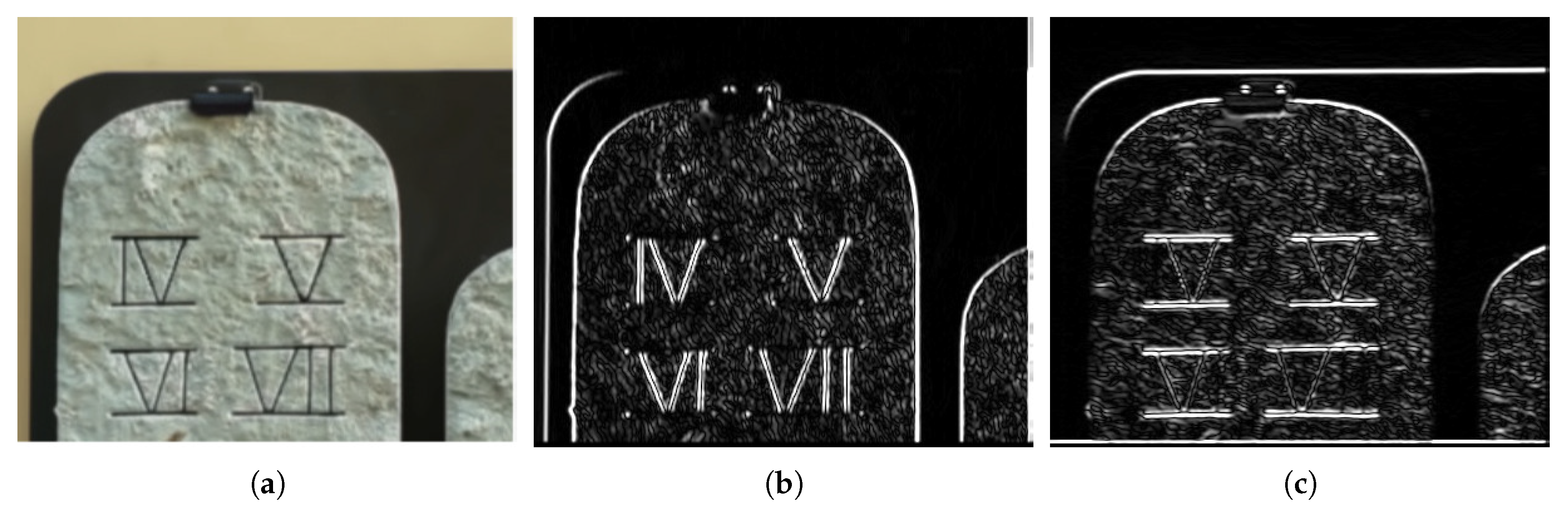
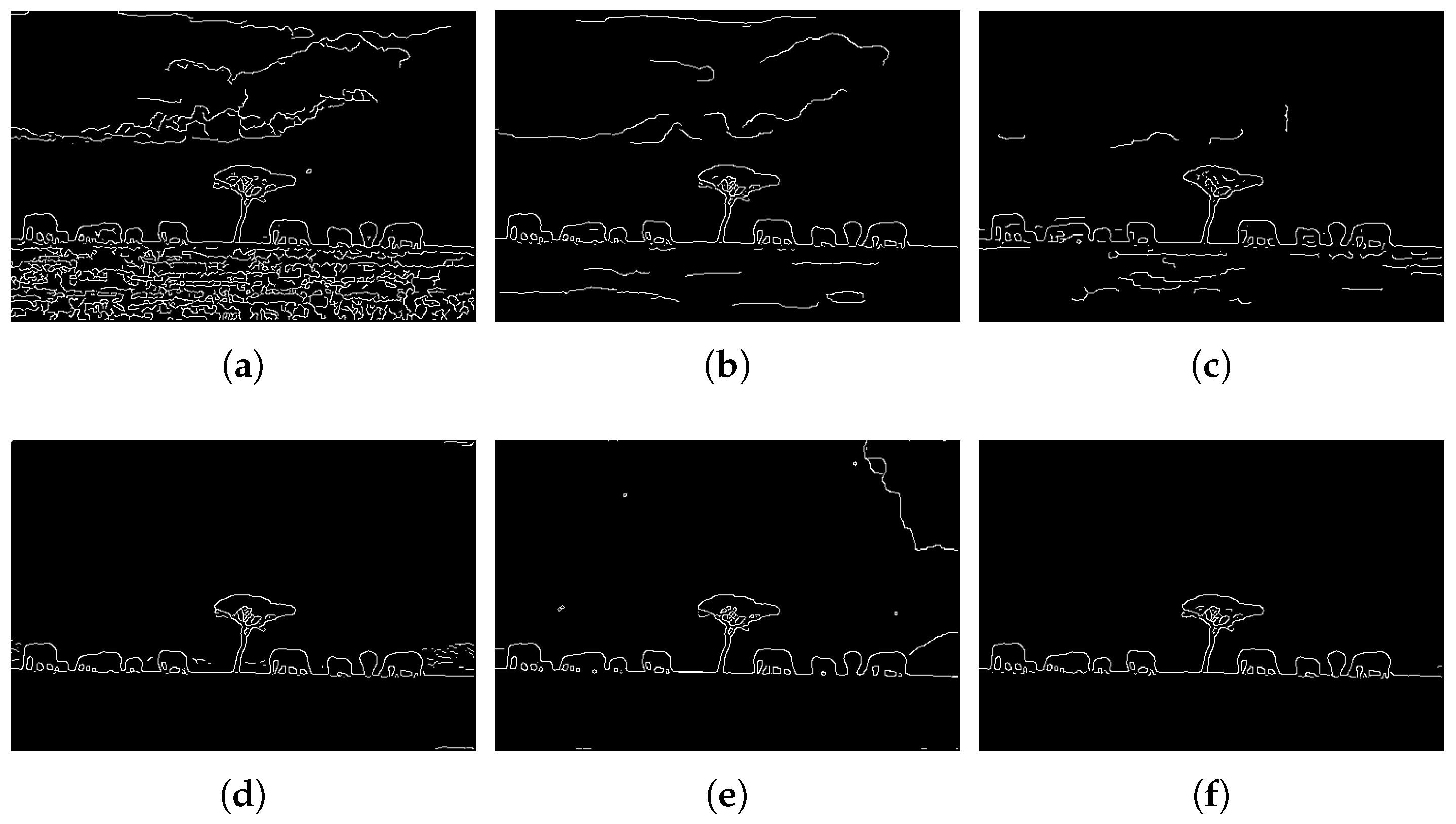
3.2. Edge Extraction
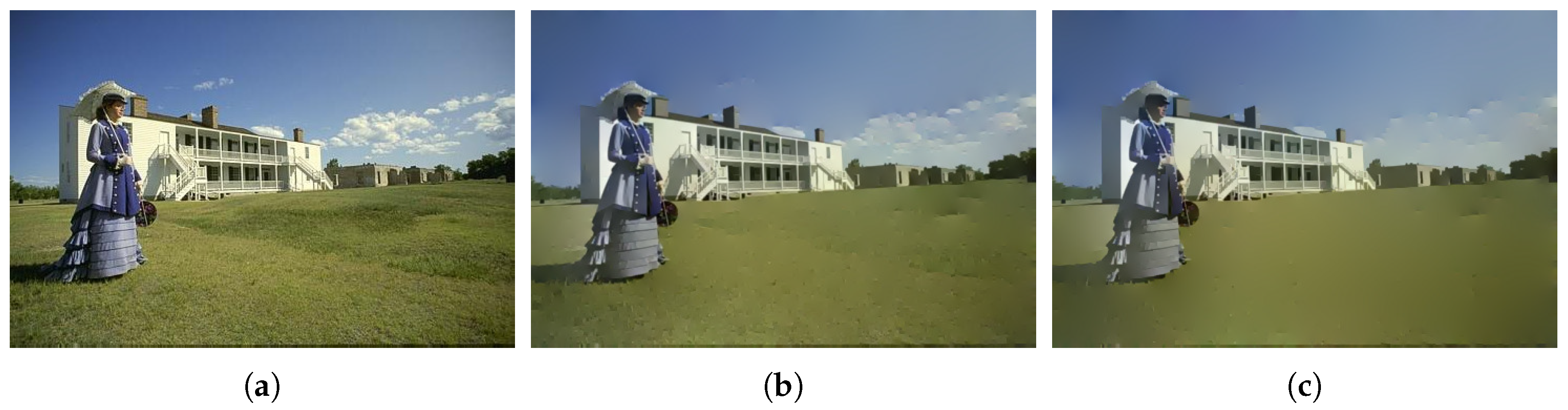
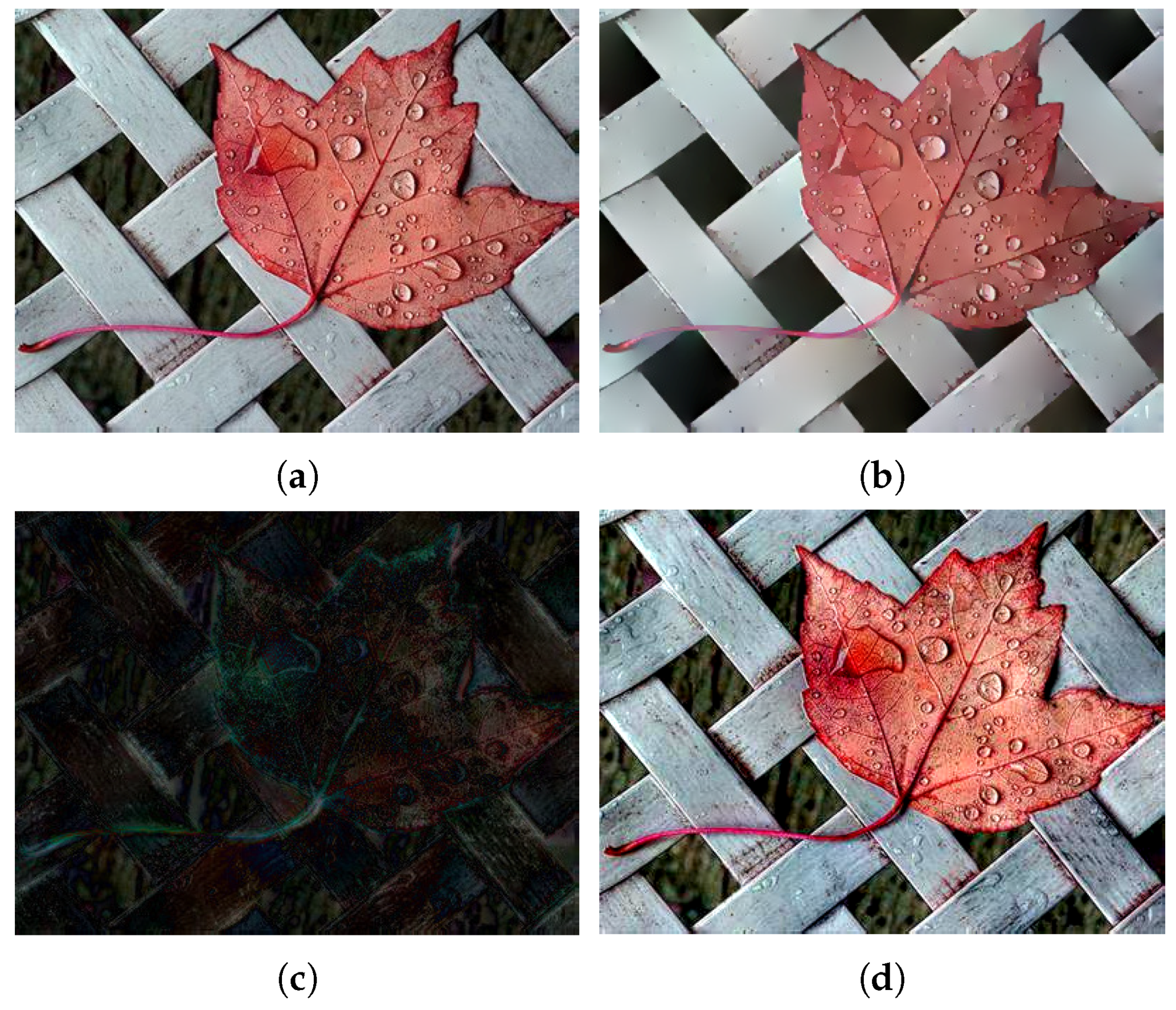
3.3. Details Exaggeration
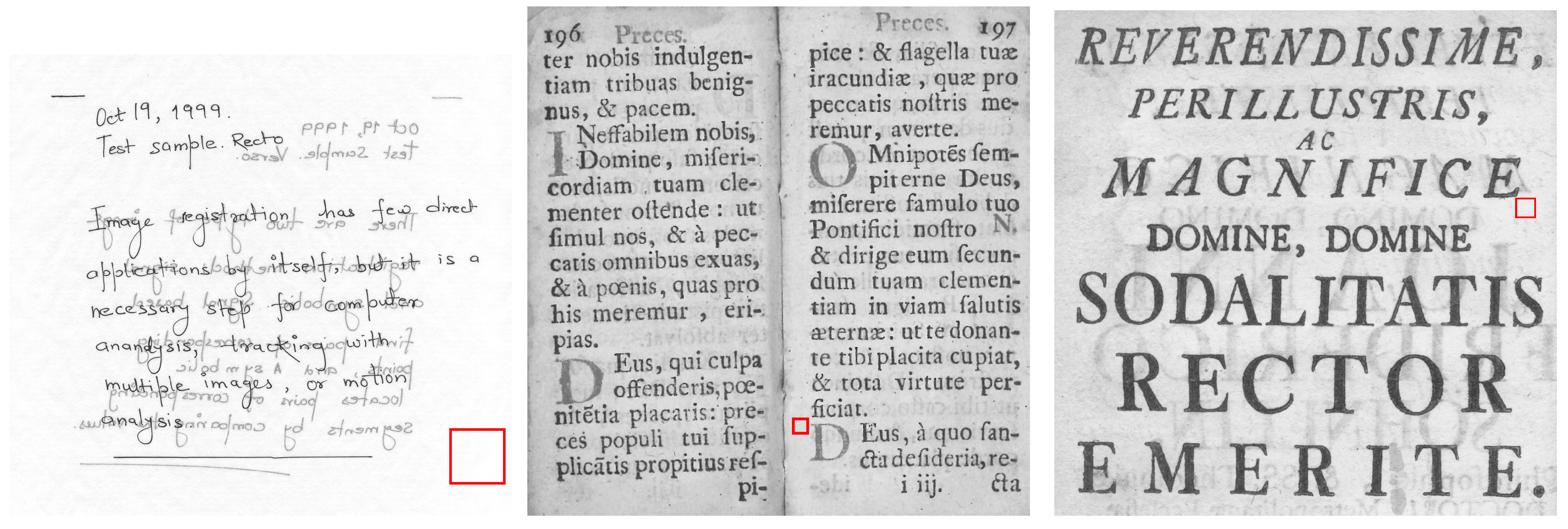
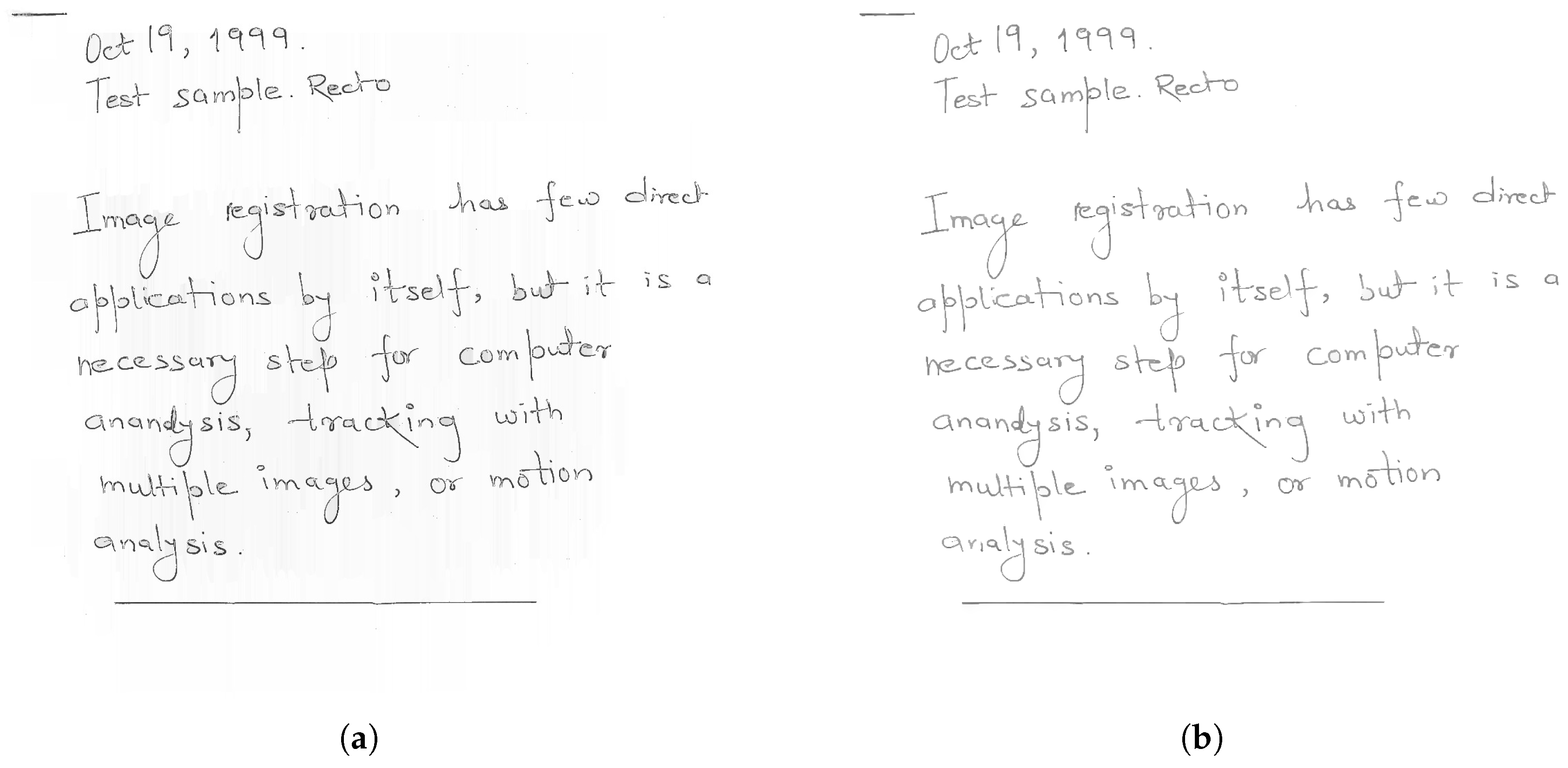
3.4. Scan-Through Removal
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, S.; Tseng, C. Color image enhancement using histogram equalization method without changing hue and saturation. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics-Taiwan, Taipei, Taiwan, 12–14 June 2017; pp. 305–306. [Google Scholar]
- Lim, S.; Isa, N.; Ooi, C.; Toh, K. A new histogram equalization method for digital image enhancement and brightness preservation. Signal Image Video Process. 2015, 9, 675–689. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Q.; Zhang, B. Image enhancement based on equal area dualistic sub-image histogram equalization method. IEEE Trans. Consum. Electron. 1999, 45, 68–75. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, D.; Li, Y.; Chen, L. Otsu’s thresholding method based on gray level-gradient two-dimensional histogram. In Proceedings of the 2010 2nd International Asia Conference on Informatics in Control, Automation and Robotics, Wuhan, China, 6–7 March 2010; Volume 3, pp. 282–285. [Google Scholar]
- Tobias, O.; Seara, R. Image segmentation by histogram thresholding using fuzzy sets. IEEE Trans. Image Process. 2002, 11, 1457–1465. [Google Scholar] [CrossRef] [PubMed]
- Thomas, G. Image segmentation using histogram specification. In Proceedings of the 2008 15th IEEE International Conference on Image Processing, San Diego, CA, USA, 12–15 October 2008; pp. 589–592. [Google Scholar]
- Coltuc, D.; Bolon, P.; Chassery, J. Exact histogram specification. IEEE Trans. Image Process. 2006, 15, 1143–1152. [Google Scholar] [CrossRef] [PubMed]
- Sen, D.; Pal, S. Automatic exact histogram specification for contrast enhancement and visual system based quantitative evaluation. IEEE Trans. Image Process. 2011, 20, 1211–1220. [Google Scholar] [CrossRef] [PubMed]
- Nikolova, M.; Wen, Y.; Chan, R. Exact histogram specification for digital images using a variational approach. J. Math. Imaging Vis. 2013, 46, 309–325. [Google Scholar] [CrossRef]
- Zhu, S.; Mumford, D. Prior learning and Gibbs reaction-diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 1236–1250. [Google Scholar] [Green Version]
- Mignotte, M. An energy-based model for the image edge-histogram specification problem. IEEE Trans. Image Process. 2012, 21, 379–386. [Google Scholar] [CrossRef] [PubMed]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Zhu, Q.; Yeh, M.; Cheng, K.; Avidan, S. Fast human detection using a cascade of histograms of oriented gradients. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 2, pp. 1491–1498. [Google Scholar]
- Déniz, O.; Bueno, G.; Salido, J.; De la Torre, F. Face recognition using histograms of oriented gradients. Pattern Recognit. Lett. 2011, 32, 1598–1603. [Google Scholar] [CrossRef]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Black, M.; Sapiro, G.; Marimont, D.; Heeger, D. Robust anisotropic diffusion. IEEE Trans. Image Process. 1998, 7, 421–432. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision, Bombay, India, 7 January 1998; pp. 839–846. [Google Scholar] [Green Version]
- Paris, S.; Durand, F. A fast approximation of the bilateral filter using a signal processing approach. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 568–580. [Google Scholar]
- Weiss, B. Fast median and bilateral filtering. ACM Trans. Graph. 2006, 25, 519–526. [Google Scholar] [CrossRef]
- Chen, J.; Paris, S.; Durand, F. Real-time edge-aware image processing with the bilateral grid. ACM Trans. Graph. 2007, 26, 1–9. [Google Scholar] [CrossRef]
- Farbman, Z.; Fattal, R.; Lischinski, D.; Szeliski, R. Edge-preserving decompositions for multi-scale tone and detail manipulation. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef]
- Rudin, L.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Physica D 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Chambolle, A. An algorithm for total variation minimization and applications. J. Math. Imaging Vis. 2004, 20, 89–97. [Google Scholar]
- Xu, L.; Lu, C.; Xu, Y.; Jia, J. Image smoothing via L0 gradient minimization. ACM Trans. Graph. 2011, 30, 1–12. [Google Scholar]
- Cheng, X.; Zeng, M.; Liu, X. Feature-preserving filtering with L0 gradient minimization. Comput. Graph. 2014, 38, 150–157. [Google Scholar] [CrossRef]
- Storath, M.; Weinmann, A.; Demaret, L. Jump-sparse and sparse recovery using Potts functionals. IEEE Trans. Signal Process. 2014, 62, 3654–3666. [Google Scholar] [CrossRef]
- Nguyen, R.; Brown, M. Fast and effective L0 gradient minimization by region fusion. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 208–216. [Google Scholar]
- Pang, X.; Zhang, S.; Gu, J.; Li, L.; Liu, B.; Wang, H. Improved L0 gradient minimization with L1 fidelity for image smoothing. PLoS ONE 2015, 10, e0138682. [Google Scholar] [CrossRef] [PubMed]
- Ono, S. L0 Gradient Projection. IEEE Trans. Image Process. 2017, 26, 1554–1564. [Google Scholar] [CrossRef] [PubMed]
- Tonazzini, A.; Salerno, E.; Bedini, L. Fast correction of bleed-through distortion in grayscale documents by a blind source separation technique. Int. J. Doc. Anal. Recognit. 2007, 10, 17–25. [Google Scholar] [CrossRef]
- Merrikh-Bayat, F.; Babaie-Zadeh, M.; Jutten, C. Using non-negative matrix factorization for removing show-through. In Proceedings of the International Conference on Latent Variable Analysis and Signal Separation, St. Malo, France, 27–30 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 482–489. [Google Scholar]
- Martinelli, F.; Salerno, E.; Gerace, I.; Tonazzini, A. Nonlinear model and constrained ML for removing back-to-front interferences from recto–verso documents. Pattern Recognit. 2012, 45, 596–605. [Google Scholar] [CrossRef]
- Gerace, I.; Palomba, C.; Tonazzini, A. An inpainting technique based on regularization to remove bleed-through from ancient documents. In Proceedings of the 2016 International Workshop on Computational Intelligence for Multimedia Understanding, Reggio Calabria, Italy, 27–28 October 2016; pp. 1–5. [Google Scholar]
- Salerno, E.; Martinelli, F.; Tonazzini, A. Nonlinear model identification and see-through cancelation from recto–verso data. Int. J. Doc. Anal. Recognit. 2013, 16, 177–187. [Google Scholar] [CrossRef]
- Savino, P.; Bedini, L.; Tonazzini, A. Joint non-rigid registration and restoration of recto-verso ancient manuscripts. In Proceedings of the 2016 International Workshop on Computational Intelligence for Multimedia Understanding, Reggio Calabria, Italy, 27–28 October 2016; pp. 1–5. [Google Scholar]
- Savino, P.; Tonazzini, A. Digital restoration of ancient color manuscripts from geometrically misaligned recto-verso pairs. J. Cult. Herit. 2016, 19, 511–521. [Google Scholar] [CrossRef]
- Sharma, G. Show-through cancellation in scans of duplex printed documents. IEEE Trans. Image Process. 2001, 10, 736–754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tonazzini, A.; Savino, P.; Salerno, E. A non-stationary density model to separate overlapped texts in degraded documents. Signal Image Video Process. 2015, 9, 155–164. [Google Scholar] [CrossRef]
- Estrada, R.; Tomasi, C. Manuscript bleed-through removal via hysteresis thresholding. In Proceedings of the 2009 10th International Conference on Document Analysis and Recognition, Barcelona, Spain, 26–29 July 2009; pp. 753–757. [Google Scholar]
- Tonazzini, A.; Bedini, L.; Salerno, E. Independent component analysis for document restoration. Doc. Anal. Recognit. 2004, 7, 17–27. [Google Scholar] [CrossRef]
- Wolf, C. Document ink bleed-through removal with two hidden markov random fields and a single observation field. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 431–447. [Google Scholar] [CrossRef] [PubMed]
- Sun, B.; Li, S.; Zhang, X.; Sun, J. Blind bleed-through removal for scanned historical document image with conditional random fields. IEEE Trans. Image Process. 2016, 25, 5702–5712. [Google Scholar] [CrossRef] [PubMed]
- Nishida, H.; Suzuki, T. Correcting show-through effects on scanned color document images by multiscale analysis. Pattern Recognit. 2003, 36, 2835–2847. [Google Scholar] [CrossRef]
- Tonazzini, A.; Gerace, I.; Martinelli, F. Multichannel blind separation and deconvolution of images for document analysis. IEEE Trans. Image Process. 2010, 19, 912–925. [Google Scholar] [CrossRef] [PubMed]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Gabay, D.; Mercier, B. A dual algorithm for the solution of nonlinear variational problems via finite element approximation. Comput. Math. Appl. 1976, 2, 17–40. [Google Scholar] [CrossRef]
- Glowinski, R. Lectures on Numerical Methods for Non-Linear Variational Problems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Gonzales, R.; Woods, R. Digital Image Processing; Addison-Welsley: Reading, MA, USA, 1992. [Google Scholar]
- Hyvarinen, A. Fast and robust fixed-point algorithms for independent component analysis. IEEE Trans. Neural Netw. 1999, 10, 626–634. [Google Scholar] [CrossRef] [PubMed] [Green Version]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chan, K.C.K.; Chan, R.H.; Nikolova, M. A Convex Model for Edge-Histogram Specification with Applications to Edge-Preserving Smoothing. Axioms 2018, 7, 53. https://doi.org/10.3390/axioms7030053
Chan KCK, Chan RH, Nikolova M. A Convex Model for Edge-Histogram Specification with Applications to Edge-Preserving Smoothing. Axioms. 2018; 7(3):53. https://doi.org/10.3390/axioms7030053
Chicago/Turabian StyleChan, Kelvin C. K., Raymond H. Chan, and Mila Nikolova. 2018. "A Convex Model for Edge-Histogram Specification with Applications to Edge-Preserving Smoothing" Axioms 7, no. 3: 53. https://doi.org/10.3390/axioms7030053
APA StyleChan, K. C. K., Chan, R. H., & Nikolova, M. (2018). A Convex Model for Edge-Histogram Specification with Applications to Edge-Preserving Smoothing. Axioms, 7(3), 53. https://doi.org/10.3390/axioms7030053