


Geometric Error Analysis of a 2UPR-RPU Over-Constrained Parallel Manipulator




Abstract
:1. Introduction
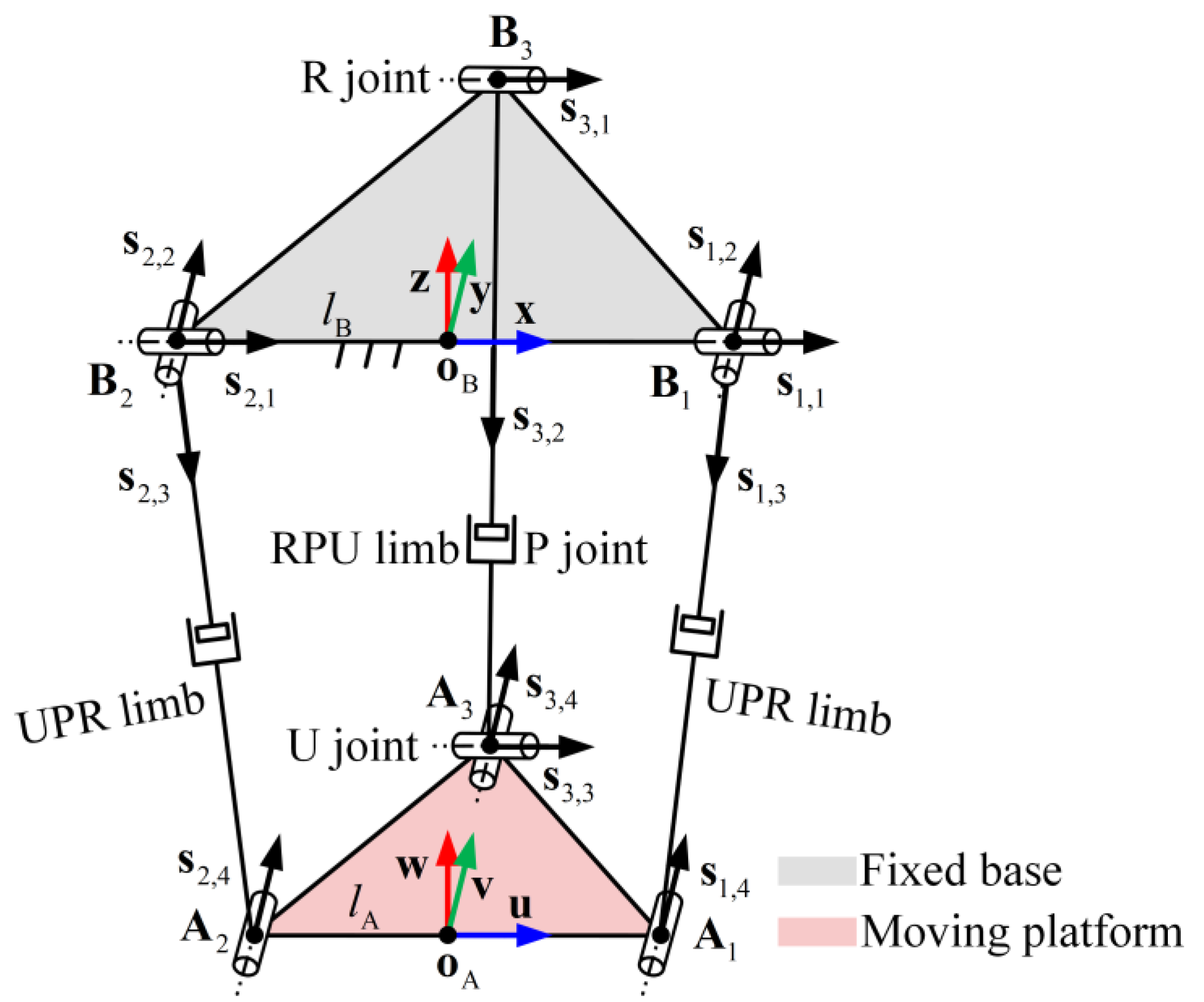
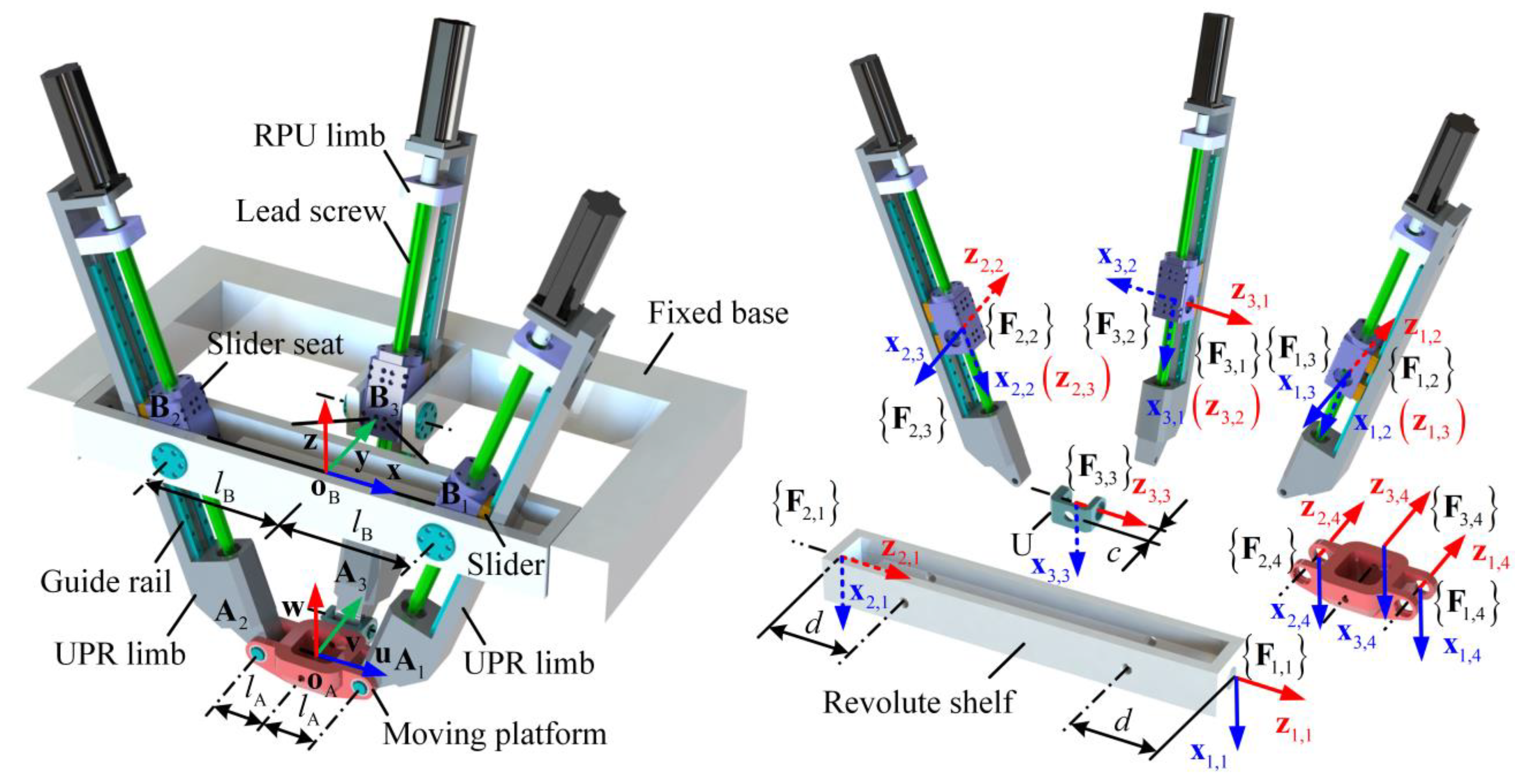
2. 2UPR-RPU Parallel Mechanism
3. Kinematics
3.1. Nominal Inverse Kinematics
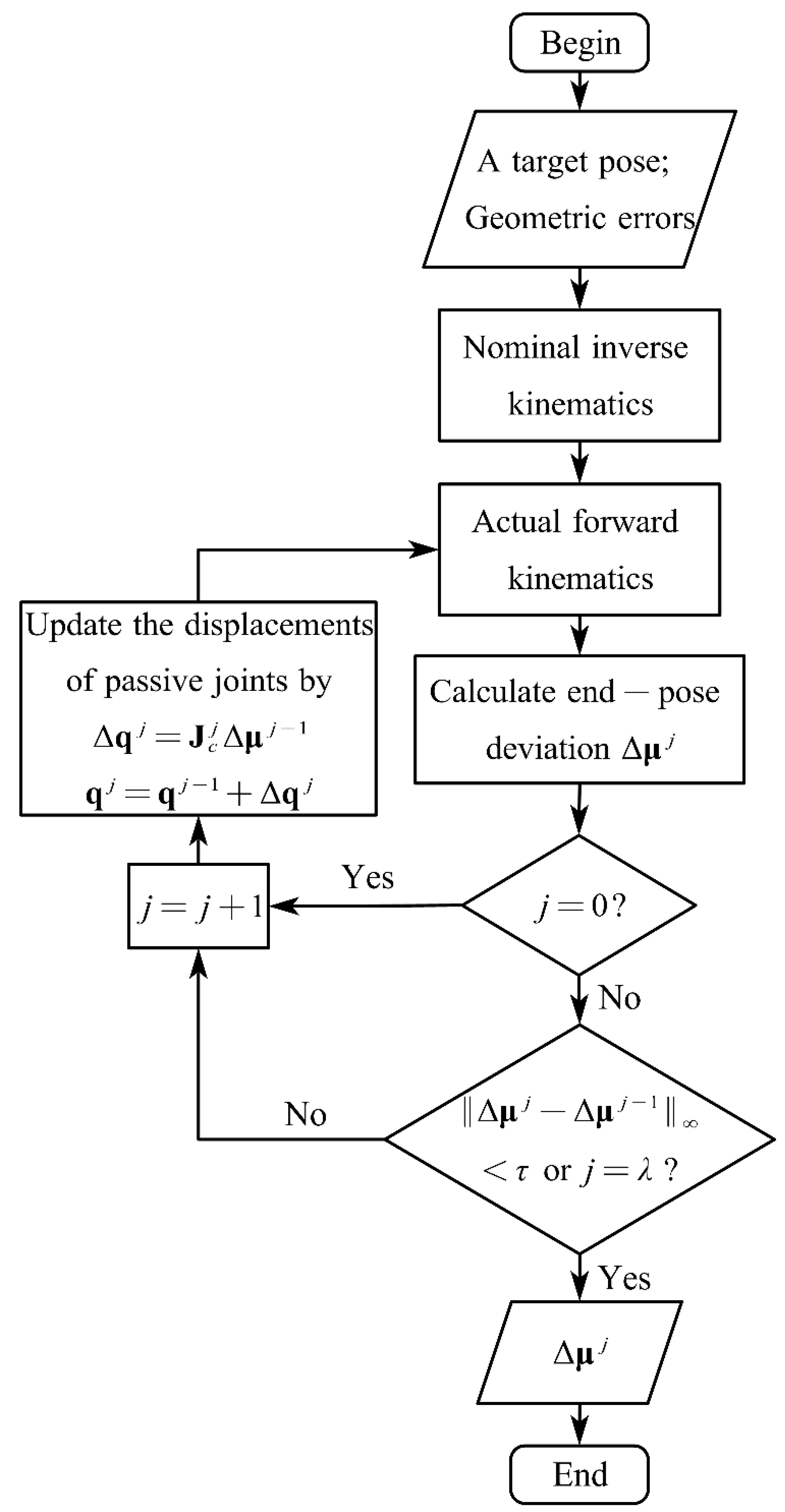
3.2. Actual Forward Kinematics
4. Evaluation Model of Deformations
5. Geometric Error Identification
5.1. Identification Analysis
5.2. Simulation Analysis
6. Sensitivity Analysis
6.1. Sensitivity Indices
6.2. Sensitivity Analysis
6.3. Verification
6.3.1. Average Angular Comprehensive Deformation
6.3.2. Average Linear Comprehensive Deformation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Lie Groups and Lie Algebras
References
- Tang, T.F.; Fang, H.L.; Zhang, J. Hierarchical design, laboratory prototype fabrication and machining tests of a novel 5-axis hybrid serial-parallel kinematic machine tool. Robot. Comput.-Integr. Manuf. 2020, 64, 101944. [Google Scholar] [CrossRef]
- Xie, F.G.; Liu, X.J.; Li, T.M. Type synthesis and typical application of 1T2R-type parallel robotic mechanisms. Math. Probl. Eng. 2013, 2013, 206181. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.C.; Hervé, J.M. Type synthesis of 3-DOF RPR-equivalent parallel mechanisms. IEEE Trans. Robot. 2014, 30, 1333–1343. [Google Scholar] [CrossRef]
- Li, Q.; Xu, L.; Chen, Q.; Ye, W. New family of RPR-equivalent parallel mechanisms: Design and application. Chin. J. Mech. Eng. 2017, 30, 217–221. [Google Scholar] [CrossRef]
- Huang, T.; Dong, C.; Liu, H.; Sun, T.; Chetwynd, D.G. A simple and visually orientated approach for type synthesis of overconstrained 1T2R parallel mechanisms. Robotica 2019, 37, 1161–1173. [Google Scholar] [CrossRef] [Green Version]
- Tang, T.; Fang, H.; Luo, H.; Song, Y.; Zhang, J. Type synthesis, unified kinematic analysis and prototype validation of a family of Exechon inspired parallel mechanisms for 5-axis hybrid kinematic machine tools. Robot. Comput.-Integr. Manuf. 2021, 72, 102181. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, Y.; Yao, J.; Jin, L. A force analysis method for overconstrained parallel mechanisms. China Mech. Eng. 2014, 25, 711–717. [Google Scholar] [CrossRef]
- Chai, X.X.; Xiang, J.N.; Li, Q.C. Singularity analysis of a 2-UPR-RPU parallel mechanism. J. Mech. Eng. Chin. Ed. 2015, 51, 144–151. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Li, T.; Wang, L.; Chen, F. Kinematic error modeling and identification of the over-constrained parallel kinematic machine. Robot. Comput.-Integr. Manuf. 2018, 49, 105–119. [Google Scholar] [CrossRef]
- He, L.; Li, Q.; Zhu, X.; Wu, C.-Y. Kinematic calibration of a three degrees-of-freedom parallel manipulator with a laser tracker. J. Dyn. Syst. Meas. Control 2019, 141, 031009. [Google Scholar] [CrossRef]
- Song, Y.M.; Zhai, Y.P.; Sun, T. Interval analysis based accuracy design of a 3-DOF rotational parallel mechanism. J. Beijing Univ. Technol. 2015, 41, 1620–1626,1755. [Google Scholar]
- Ni, Y.; Zhang, B.; Sun, Y.; Zhang, Y. Accuracy analysis and design of A3 parallel spindle head. Chin. J. Mech. Eng. 2016, 29, 239–249. [Google Scholar] [CrossRef]
- Zhang, J.; Chi, C.C.; Jiang, S.J. Accuracy design of 2UPR-RPS parallel mechanism. Trans. Chin. Soc. Agric. Eng. 2021, 52, 411–420. [Google Scholar] [CrossRef]
- Huang, T.; Whitehouse, D.J.; Chetwynd, D.G. A unified error model for tolerance design, assembly and error compensation of 3-DOF parallel kinematic machines with parallelogram struts. CIRP Ann. 2002, 51, 297–301. [Google Scholar] [CrossRef]
- Zhang, J.T.; Lian, B.B.; Song, Y.M. Geometric error analysis of an over-constrained parallel tracking mechanism using the screw theory. Chin. J. Aeronaut. 2019, 32, 1541–1554. [Google Scholar] [CrossRef]
- Luo, X.; Xie, F.; Liu, X.-J.; Li, J. Error modeling and sensitivity analysis of a novel 5-degree-of-freedom parallel kinematic machine tool. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2019, 233, 1637–1652. [Google Scholar] [CrossRef]
- Wang, W.; Yun, C. Orthogonal experimental design to synthesize the accuracy of robotic mechanism. J. Mech. Eng. Chin. Ed. 2009, 45, 18–24. [Google Scholar] [CrossRef]
- Yao, R.; Zhu, W.B.; Huang, P. Accuracy analysis of stewart platform based on interval analysis method. Chin. J. Mech. Eng. 2013, 26, 29–34. [Google Scholar] [CrossRef]
- Wu, M.; Yue, X.; Chen, W.; Nie, Q.; Zhang, Y. Accuracy analysis and synthesis of asymmetric parallel mechanism based on Sobol-QMC. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 4200–4214. [Google Scholar] [CrossRef]
- Li, X.Y.; Chen, W.Y.; Han, X.G. Accuracy analysis and synthesis of 3-RPS parallel machine based on orthogonal design. J. Beijing Univ. Aeronaut. Astronaut. 2011, 37, 979–984. [Google Scholar] [CrossRef]
- Tai-Ke, Y.; Xi, Z.; Feng, Z.; Li-Min, Z.; Yong, W. Accuracy synthesis of a 3-RPS parallel robot based on manufacturing costs. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 5168–5172. [Google Scholar]
- Liu, H.T.; Pan, Q.; Yin, F.W.; Dong, C.L. Accuracy synthesis of the TriMule hybrid robot. J. Tianjin Univ. Sci. Technol. 2019, 52, 1245–1254. [Google Scholar]
- Tang, T.; Luo, H.; Song, Y.; Fang, H.; Zhang, J. Chebyshev inclusion function based interval kinetostatic modeling and parameter sensitivity analysis for Exechon-like parallel kinematic machines with parameter uncertainties. Mech. Mach. Theory 2021, 157, 104209. [Google Scholar] [CrossRef]
- Yu, D.; Zhao, Q.; Guo, J.; Chen, F.; Hong, J. Accuracy analysis of spatial overconstrained extendible support structures considering geometric errors, joint clearances and link flexibility. Aerosp. Sci. Technol. 2021, 119, 107098. [Google Scholar] [CrossRef]
- Chen, G.; Kong, L.; Li, Q.; Wang, H.; Lin, Z. Complete, minimal and continuous error models for the kinematic calibration of parallel manipulators based on POE formula. Mech. Mach. Theory 2018, 121, 844–856. [Google Scholar] [CrossRef]
- Kong, L.; Chen, G.; Wang, H.; Huang, G.; Zhang, D. Kinematic calibration of a 3-PRRU parallel manipulator based on the complete, minimal and continuous error model. Robot. Comput.-Integr. Manuf. 2021, 71, 102158. [Google Scholar] [CrossRef]
- Sun, T.; Song, Y.; Li, Y.; Xu, L. Separation of comprehensive geometrical errors of a 3-DOF parallel manipulator based on Jacobian matrix and its sensitivity analysis with Monte-Carlo method. Chin. J. Mech. Eng. 2011, 24, 406–413. [Google Scholar] [CrossRef]
- Chen, Y.; Xie, F.; Liu, X.; Zhou, Y. Error modeling and sensitivity analysis of a parallel robot with SCARA (selective compliance assembly robot arm) motions. Chin. J. Mech. Eng. 2014, 27, 693–702. [Google Scholar] [CrossRef]
- Ma, J.G. Kinematics Analysis and Parameter Optimization of 2UPR-RPU Parallel Mechanism. Master’s Thesis, Zhejiang Sci-Tech University, Hangzhou, China, 2014. [Google Scholar] [CrossRef]
- Selig, J.M. Geometric Fundamentals of Robotics; Springer: New York, NY, USA, 2005. [Google Scholar] [CrossRef]
- Dai, J.S. Screw Algebra and Lie Groups and Lie Algebras; Higher Education Press: Beijing, China, 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| {Fi,j} | The Location | Fi,j | xi,j | zi,j |
|---|---|---|---|---|
| {F1,1} | On the revolute shelf | The intersection of the right hole axis of the revolute shelf and the right end face of the revolute shelf | Parallel to the intersection of the front and rear symmetry plane of the right hole of the revolute shelf and the vertical plane of the right hole axis | Coincide with the right hole axis of the revolute shelf |
| Point down | Point outwards | |||
| {F1,2} | On the slider seat | The midpoint of the hole axis of the slider seat | Parallel to the intersection of the slider mounting plane and the vertical plane of the hole axis of the slider seat | Coincide with the hole axis of the slider seat |
| Point to the moving platform | Point to the RPU limb | |||
| {F1,3} | On the lead screw | The intersection of the lead screw axis and the plane passing through z1,2 and perpendicular to the slider mounting plane | Parallel to the intersection of the guide rail plane and the vertical plane of the lead screw axis | Coincide with the lead screw axis |
| Point in the direction opposite to the RPU limb | Point to the moving platform | |||
| {F1,4} | On the moving platform | The midpoint of the right hole axis of the moving platform | Parallel to the intersection of the vertical plane of the right hole axis of the moving platform and the plane constructed with v and w | Coincide with the right hole axis of the moving platform |
| Point down | Point to the RPU limb |
| {Fi,j} | The Location | Fi,j | xi,j | zi,j |
|---|---|---|---|---|
| {F2,1} | On the revolute shelf | The intersection of the left hole axis of the revolute shelf and the left end face of the revolute shelf | Parallel to the intersection of the front and rear symmetry plane of the left hole of the revolute shelf and the vertical plane of the left hole axis | Coincide with the left hole axis of the revolute shelf |
| Point down | Point inwards | |||
| {F2,2} | On the slider seat | The midpoint of the hole axis of the slider seat | Parallel to the intersection of the slider mounting plane and the vertical plane of the hole axis of the slider seat | Coincide with the hole axis of the slider seat |
| Point to the moving platform | Point to the RPU limb | |||
| {F2,3} | On the lead screw | The intersection of the lead screw axis and the plane passing through z2,2 and perpendicular to the slider mounting plane | Parallel to the intersection of the guide rail plane and the vertical plane of the lead screw axis | Coincide with the lead screw axis |
| Point in the direction opposite to the RPU limb | Point to the moving platform | |||
| {F2,4} | On the moving platform | The midpoint of the left hole axis of the moving platform | Parallel to the intersection of the vertical plane of the left hole axis of the moving platform and the plane constructed with v and w | Coincide with the left hole axis of the moving platform |
| Point down | Point to the RPU limb |
| {Fi,j} | The Location | Fi,j | xi,j | zi,j |
|---|---|---|---|---|
| {F3,1} | On the slider seat | The midpoint of the hole axis of the slider seat | Parallel to the intersection of the slider mounting plane and the vertical plane of the hole axis of the slider seat | Coincide with the hole axis of the slider seat |
| Point to the moving platform | Point to the first UPR limb | |||
| {F3,2} | On the lead screw | The intersection of the lead screw axis and the plane passing through z3,1 and perpendicular to the slider mounting plane | Parallel to the intersection of the guide rail plane and the vertical plane of the lead screw axis | Coincide with the lead screw axis |
| Point to the second UPR limb | Point to the moving platform | |||
| {F3,3} | On the U joint | The midpoint of the hole axis of the U joint | Parallel to the intersection of the vertical planes of the two hole axes of the U joint | Coincide with the hole axis of the U joint |
| Point down | Point to the first UPR limb | |||
| {F3,4} | On the moving platform | The intersection of the rear hole axis of the moving platform and the rear end face of the moving platform | Parallel to the intersection of the vertical plane of the rear hole axis of the moving platform and the plane constructed with v and w | Coincide with the rear hole axis of the moving platform |
| Point down | Point to the RPU limb |
| Symbols | Values | Units |
|---|---|---|
| lA | 0.06 | m |
| lB | 0.15 | m |
| c | 0.025 | m |
| d | 0.115 | m |
| Symbols | Group 1 | Group 2 | Group 3 | Units |
|---|---|---|---|---|
| δi,j | 0.005 | 0.001 | 5 × 10−5 | m |
| εi,j | 0.005 | π/180 | π/7200 | rad |
| i | j | ||||||
|---|---|---|---|---|---|---|---|
| 1, 2 | 0 | ✓ | ✓ | – | ✓ | ✓ | |
| 1, 2 | 1 | ✓ | ✓ | – | |||
| 1, 2 | 2 | – | ✓ | ✓ | ✓ | ||
| 1, 2 | 3 | ✓ | – | – | ✓ | ✓ | |
| 1, 2 | 4 | ✓ | ✓ | – | ✓ | ||
| 3 | 0 | – | ✓ | ✓ | |||
| 3 | 1 | – | ✓ | ✓ | |||
| 3 | 2 | – | – | ✓ | ✓ | ||
| 3 | 3 | ✓ | – | – | |||
| 3 | 4 | ✓ | – | ✓ |
| i | j | ||||||
|---|---|---|---|---|---|---|---|
| 1, 2 | 0 | ✓ | ✓ | – | ✓ | ✓ | |
| 1, 2 | 1 | ✓ | ✓ | – | ✓ | ||
| 1, 2 | 2 | – | ✓ | ✓ | ✓ | ||
| 1, 2 | 3 | ✓ | – | – | ✓ | ✓ | |
| 1, 2 | 4 | ✓ | ✓ | – | ✓ | ||
| 3 | 0 | – | ✓ | ✓ | |||
| 3 | 1 | – | ✓ | ✓ | |||
| 3 | 2 | – | – | ✓ | ✓ | ||
| 3 | 3 | ✓ | – | – | |||
| 3 | 4 | ✓ | – | ✓ |
| Symbols | Group 1 | Group 2 | Group 3 | Units |
|---|---|---|---|---|
| The standard deviations of δi,j | 1.6667 × 10−3 | 3.3333 × 10−5 | 1.6667 × 10−5 | m |
| The standard deviations of εi,j | 1.6667 × 10−3 | π/540 | π/21,600 | rad |
| Group Number | Ge5 [mm or °] | Other Geometric Errors [mm or °] | [°] | [°] |
|---|---|---|---|---|
| Group 1 | 0.1 | 0.1 | 0.1430 | 0.0961 |
| Group 2 | 0.01 | 0.1 | 0.1430 | 0.0961 |
| Group 3 | 0.001 | 0.1 | 0.1430 | 0.0961 |
| i | j | [mm] | [mm] | [mm] | [°] | [°] | [°] |
|---|---|---|---|---|---|---|---|
| 1, 2 | 0 | 0.1 | 0.0177 | 0.0381 | – | 0.0054 | 0.0033 |
| 1, 2 | 1 | 0.1 | 0.0174 | 0.1 | 0.0053 | – | 1 |
| 1, 2 | 2 | – | 0.1 | 0.0173 | 0.0056 | 0.0092 | 0.1 |
| 1, 2 | 3 | 0.0174 | 0.1 | – | – | 0.0037 | 0.0056 |
| 1, 2 | 4 | 0.1 | 0.0174 | 0.1 | 0.0028 | – | 0.0022 |
| 3 | 0 | 0.1 | 0.1 | 0.1 | – | 0.0079 | 0.0057 |
| 3 | 1 | – | 0.1 | 0.1 | 0.0083 | 0.0135 | 0.1 |
| 3 | 2 | 0.1 | 0.1 | – | – | 0.0137 | 0.0084 |
| 3 | 3 | 0.1 | 0.1 | 0.1 | 0.0061 | – | – |
| 3 | 4 | 0.1 | 0.1 | 0.1 | 0.0037 | – | 0.0024 |
| Group Number | [°] | [°] | [mm] | [mm] |
|---|---|---|---|---|
| Group 1 | 0.0165 | 0.0118 | 0.0696 | 0.0390 |
| Group 2 | 0.1061 | 0.0714 | 0.8374 | 0.3581 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Wang, B.; Zheng, J. Geometric Error Analysis of a 2UPR-RPU Over-Constrained Parallel Manipulator. Machines 2022, 10, 990. https://doi.org/10.3390/machines10110990
Du X, Wang B, Zheng J. Geometric Error Analysis of a 2UPR-RPU Over-Constrained Parallel Manipulator. Machines. 2022; 10(11):990. https://doi.org/10.3390/machines10110990
Chicago/Turabian StyleDu, Xu, Bin Wang, and Junqiang Zheng. 2022. "Geometric Error Analysis of a 2UPR-RPU Over-Constrained Parallel Manipulator" Machines 10, no. 11: 990. https://doi.org/10.3390/machines10110990
APA StyleDu, X., Wang, B., & Zheng, J. (2022). Geometric Error Analysis of a 2UPR-RPU Over-Constrained Parallel Manipulator. Machines, 10(11), 990. https://doi.org/10.3390/machines10110990