

Vibration Image Representations for Fault Diagnosis of Rotating Machines: A Review


Abstract
:1. Introduction
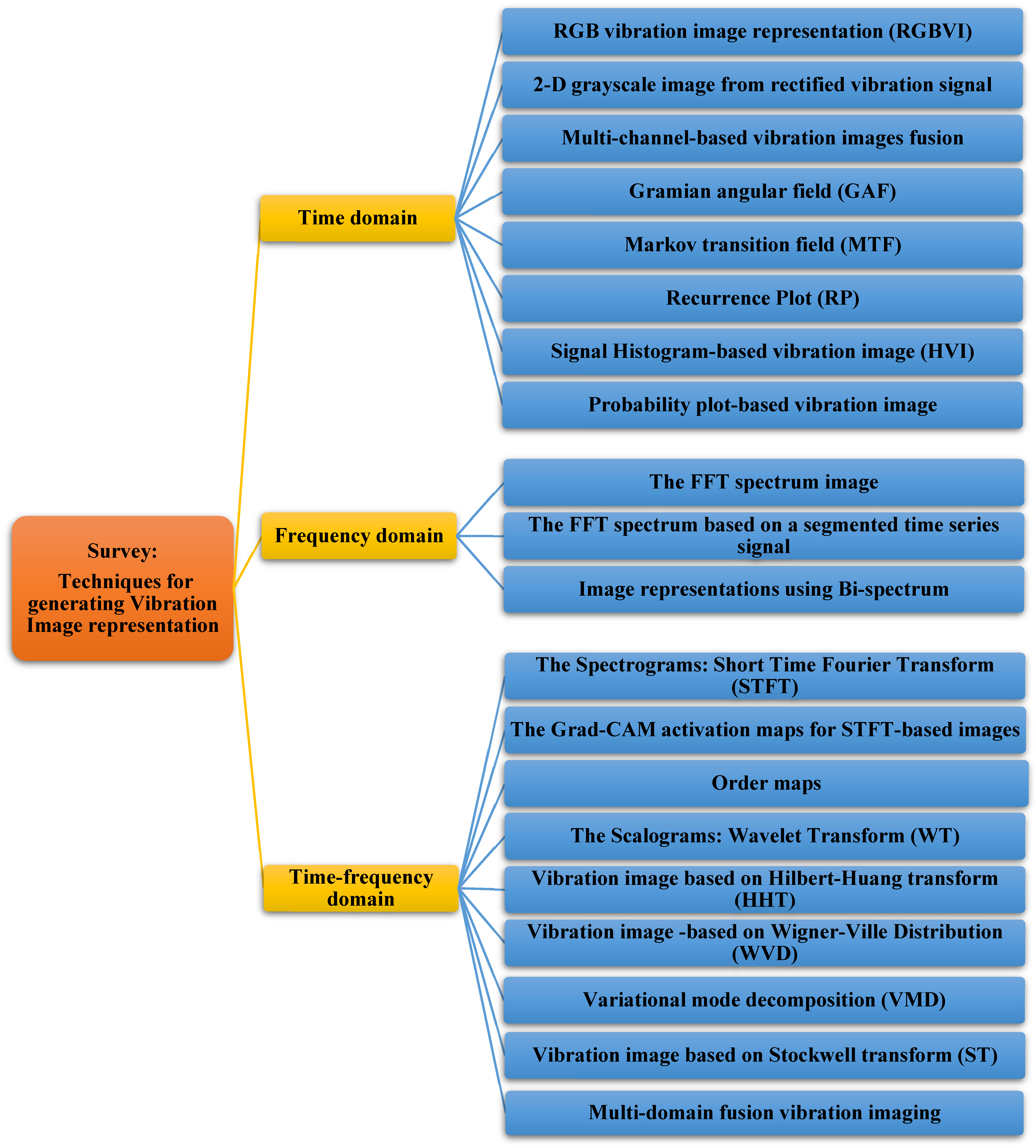
- We summarise the techniques used for the image representations of vibration signals in three signal analysis domains, as shown in Figure 2. The summary includes ten techniques in the time domain, three techniques in the frequency domain, and nine techniques in the time–frequency domain. The latest applications of these techniques in rotating machine fault diagnosis are also discussed.
- With regard to the time domain-based techniques, we present and discuss 2D grayscale, RGBVI, multi-channel fusion, the Gramian transition field, the Markov transition field, the recurrence plot, dominant neighbourhood structure maps (DNS), the signal histogram, and probability plot-based vibration image techniques. With regard to the frequency domain-based techniques, we present and discuss the FFT spectrum and the bi-spectrum, and with regard to the time–frequency domain-based techniques, we present and discuss STFT, STFT-based Grad-CAM, order maps, WT, HHT, Wigner–Ville distribution (WVD), variational mode decomposition (VMD), Stockwell transforms, and multi-domain fusion vibration imaging (MDFVI)-based vibration image representations.
- 3.
- In addition to comprehensively reviewing the development and application of vibration image representation in rotating machine fault diagnosis, we also present the current commonly and publicly available vibration datasets used for fault diagnosis. Finally, we discuss possible future research trends and directions.
2. Time Domain-Based Vibration Image Representations
2.1. Time Series Segmentation-Based Techniques
2.1.1. RGB Vibration Image Representation (RGBVI)
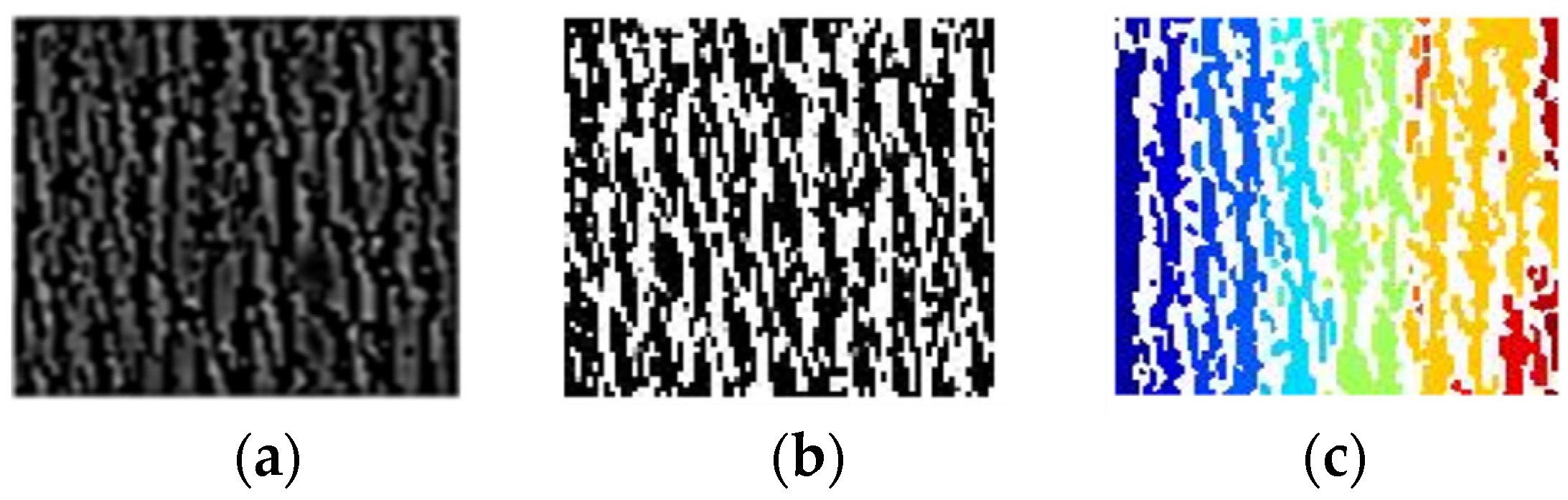
- Convert the grayscale image into a binary image by converting all pixels in the grayscale image with values greater than 1 into white and all other pixels into black.
- Generate a label matrix from the connected components in the binary image with unique values.
- Convert the created label matrix into an RGB-based colour image with a set of colour and texture features of the labeled regions.
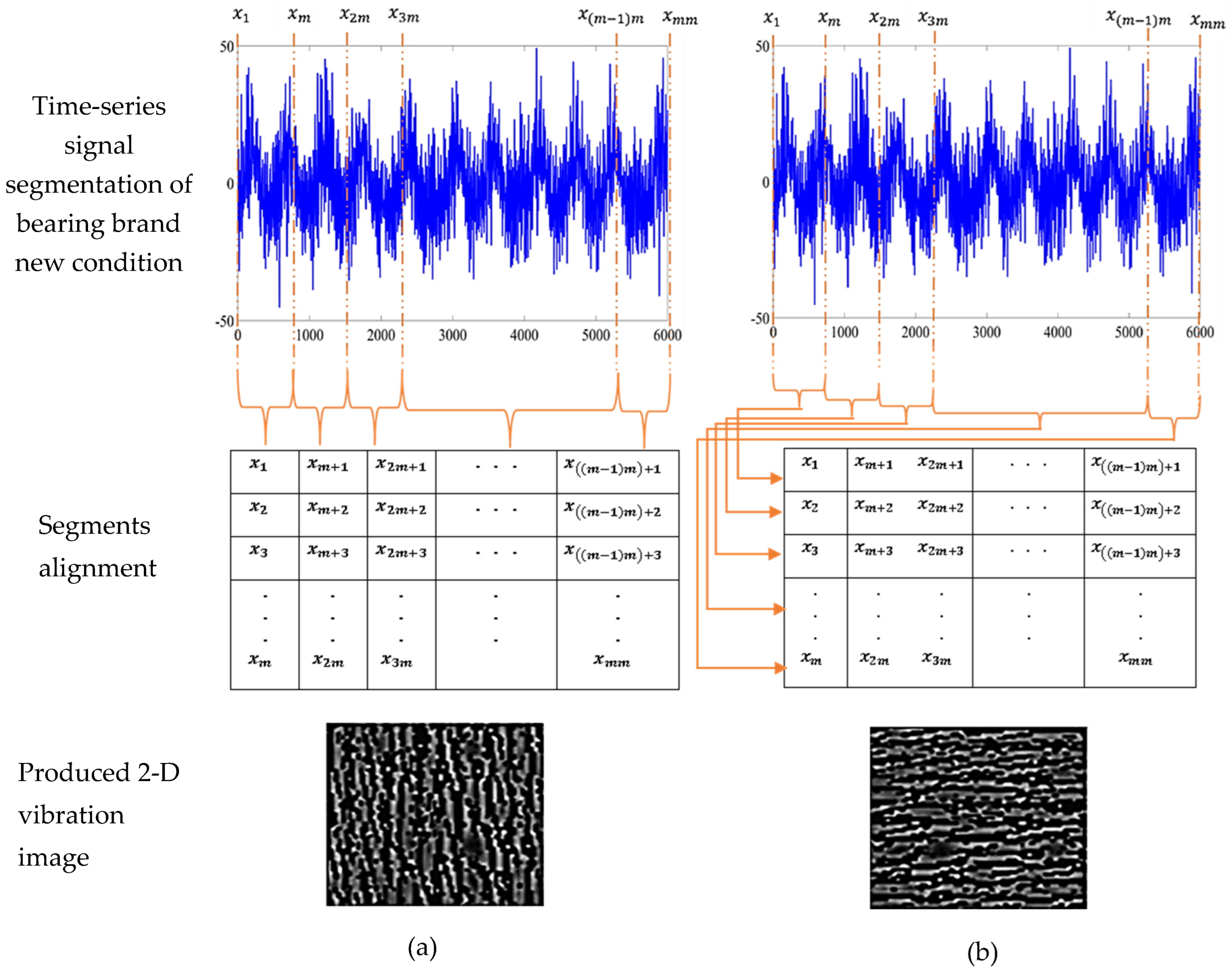
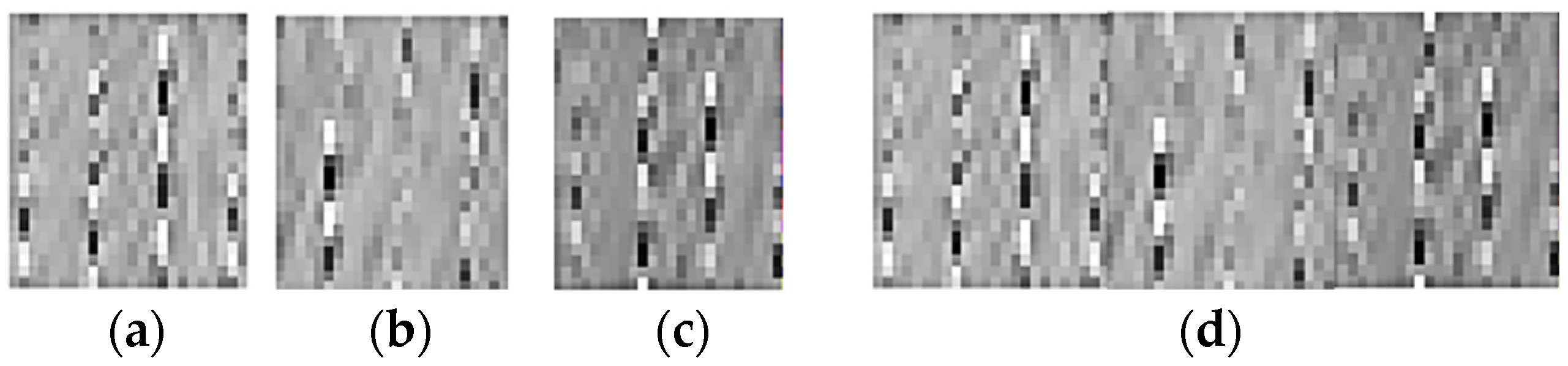
2.1.2. Constructing a 2D Grayscale Image from a Rectified Vibration Signal
2.2. Multi-Channel-Based Vibration Images Fusion
- The three raw signals are randomly segmented to obtain several scalars . Here, is the signal collection channel, and ;
- The scalar products can be computed using the following equation
- The pixel value of the feature images can be calculated using the following equation
2.3. Gramian Angular Field (GAF)
- Given the original collected 1D time series vibration where represents the length of the vibration signal, first is rescaled so all values are in the range [−1, 1] such that
- The rescaled time series is represented in polar coordinates by encoding the value as the angular cosine and the time stamp as the radius such that
- 3.
- The angular perspective is exploited in view of the trigonometric sum between each point to find the time-based correlation inside different time intervals. Thus, the GAF matrix can be defined using the following equation
2.4. Markov Transition Field (MTF)
- Construct a Markov transition matrix by recognising the Q quantile bins of the input signal and allocate each element in to its corresponding quantile such that
- 2.
- The MTF -sized matrix is computed using the following equation
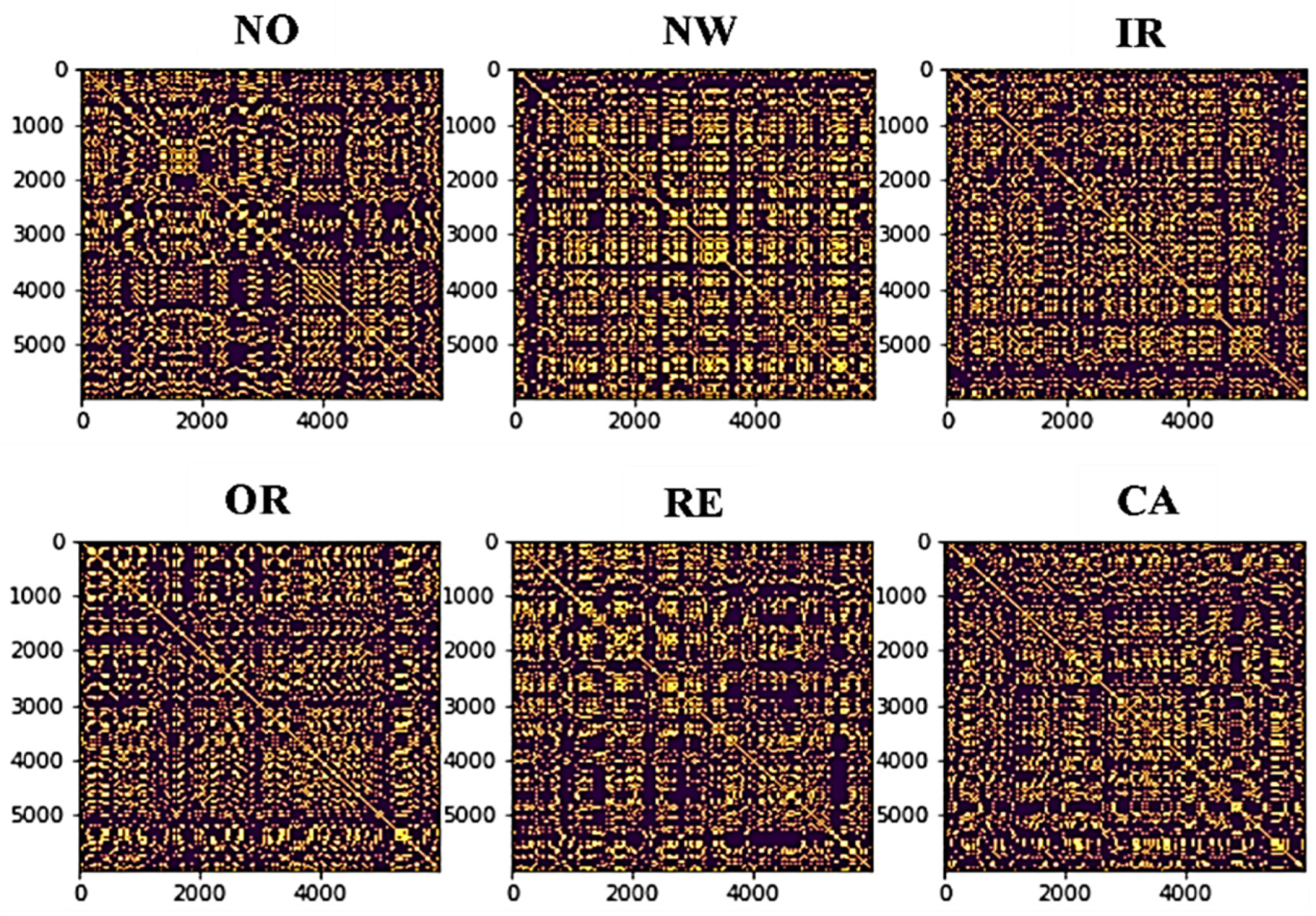
2.5. Recurrence Plot (RP)
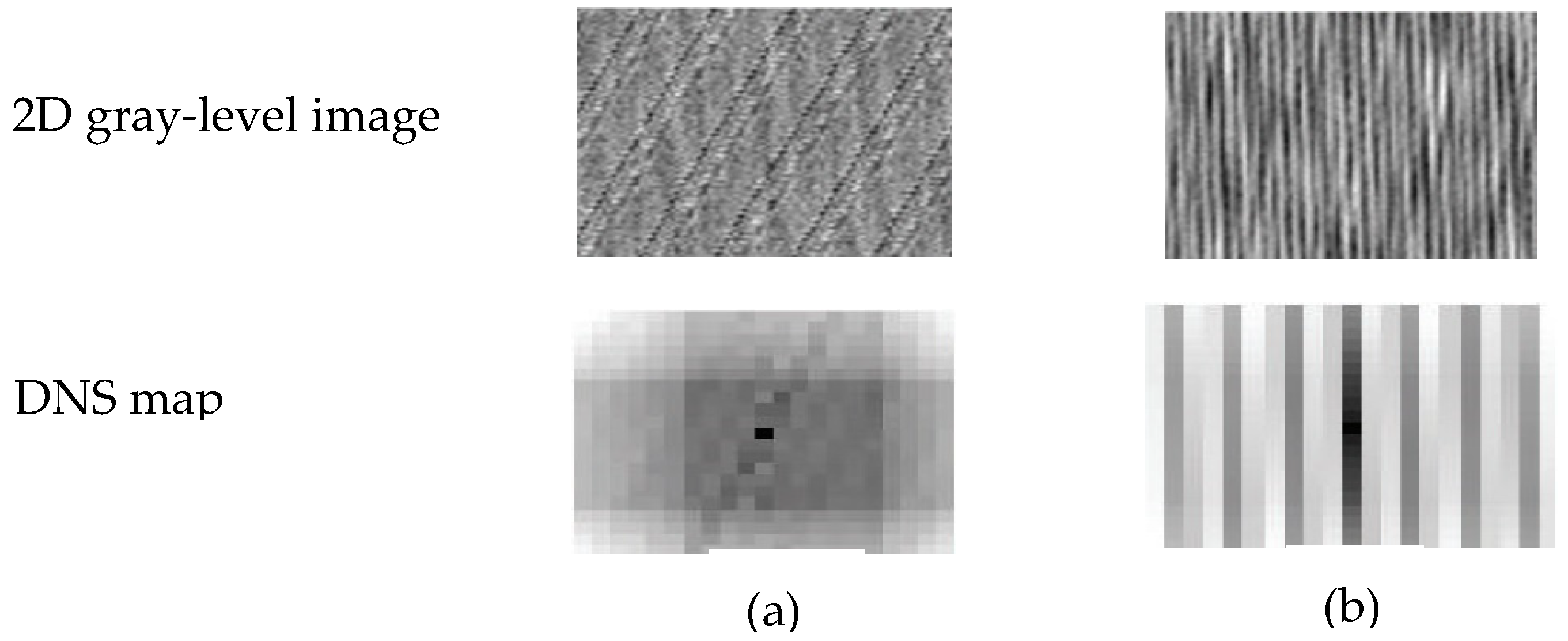
2.6. DNS Map-Based 2D Vibration Image
- Convert the 1D time series vibration signal to a 2D gray-level image. Firstly, in this step, the amplitude of each sample of the time series vibration signal is normalised; then, each sample is assigned the intensity of the corresponding pixel.
- Produce a dominant neighbourhood structure (DNS) map to extract texture features from the 2D gray-level image.
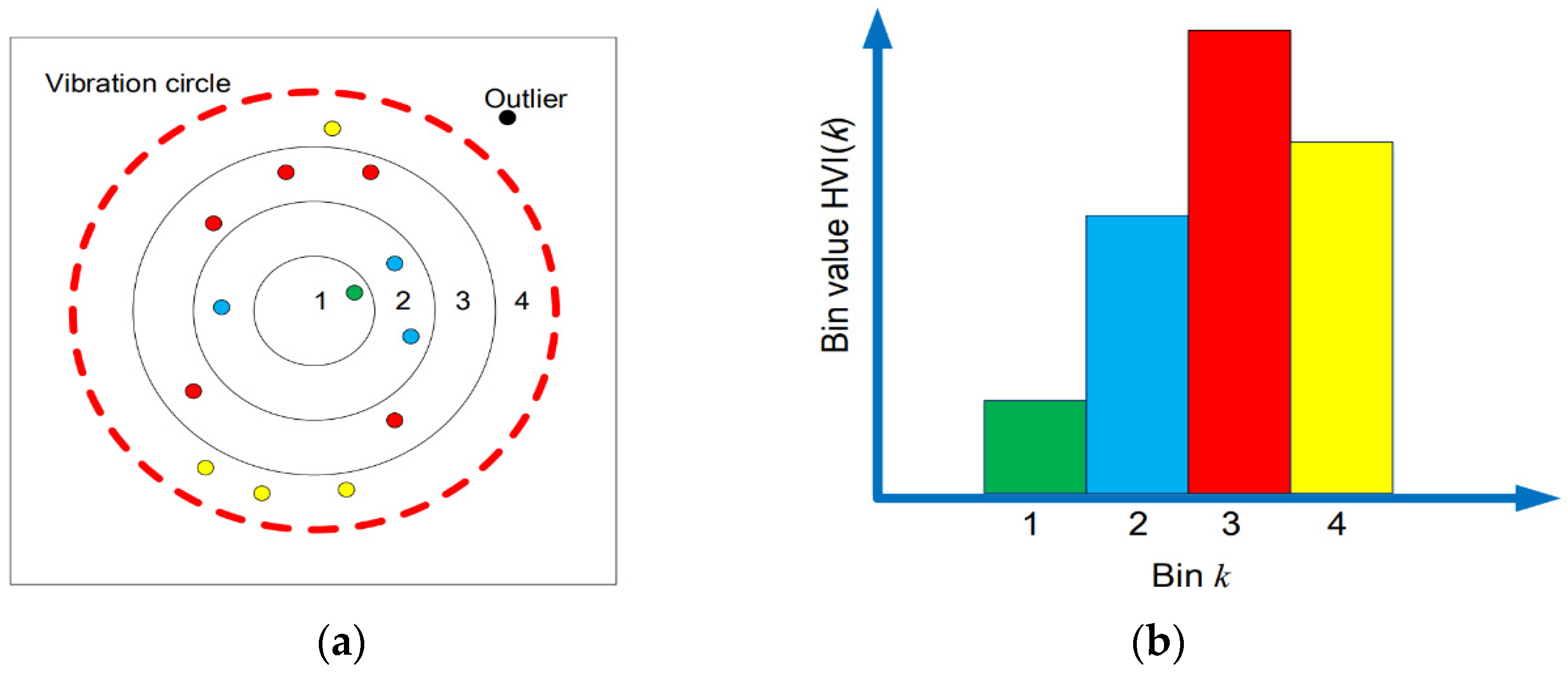
2.7. Signal Histogram-Based Vibration Image (HVI)
- Compute the vibration image center for the vibration sample points, where and is the total number of vibration sample points such that
- Eliminate the unexpected outliers by drawing a vibration circle with the center of and as the radius, which can be computed as follows
- 3.
- Construct the histogram feature by dividing the vibration circle into rings. Here, the bin value of the histogram is set to the number of sample points within the ring.
- 4.
- Normalise the histogram such that
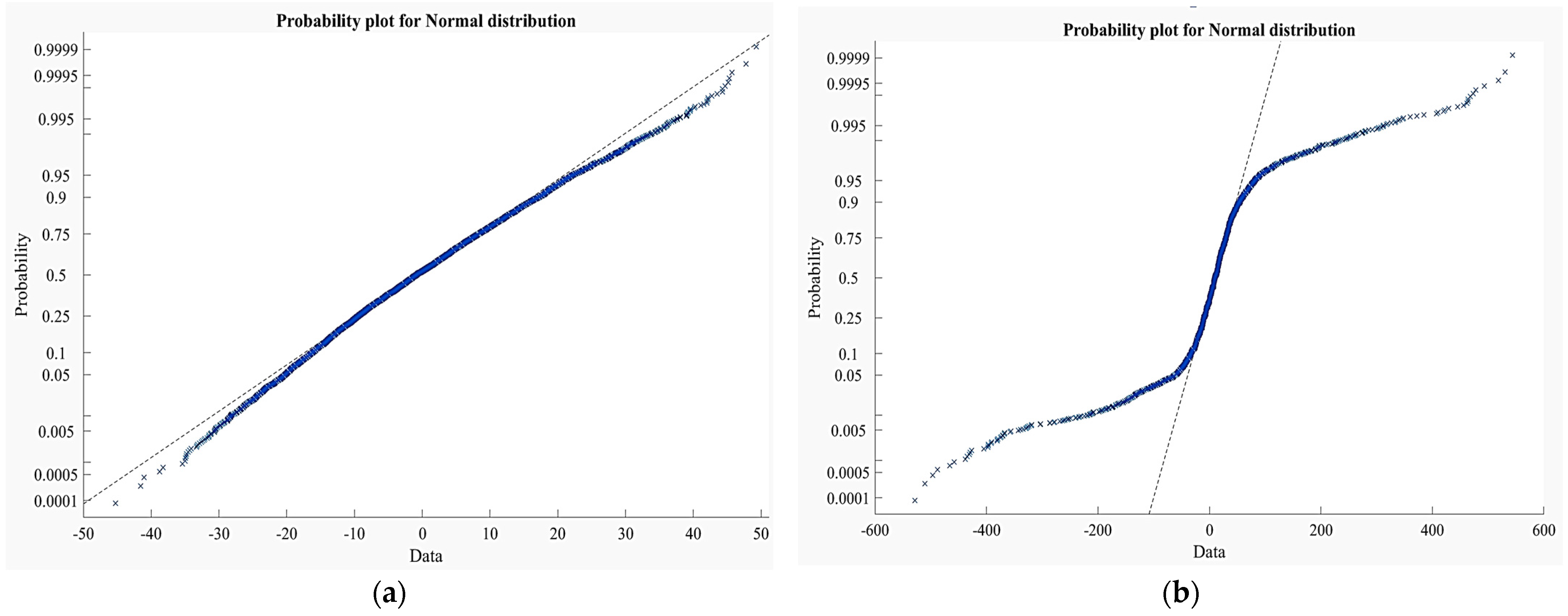
2.8. Probability Plot-Based Vibration Image
3. Frequency Domain-Based Vibration Image Representations
3.1. The FFT Spectrum Image
3.2. The FFT Spectrum Image Based on Segmented Time Series Signal
3.3. Image Representations Using Bi-Spectrum
4. Time–Frequency Domain-Based Vibration Image Representations
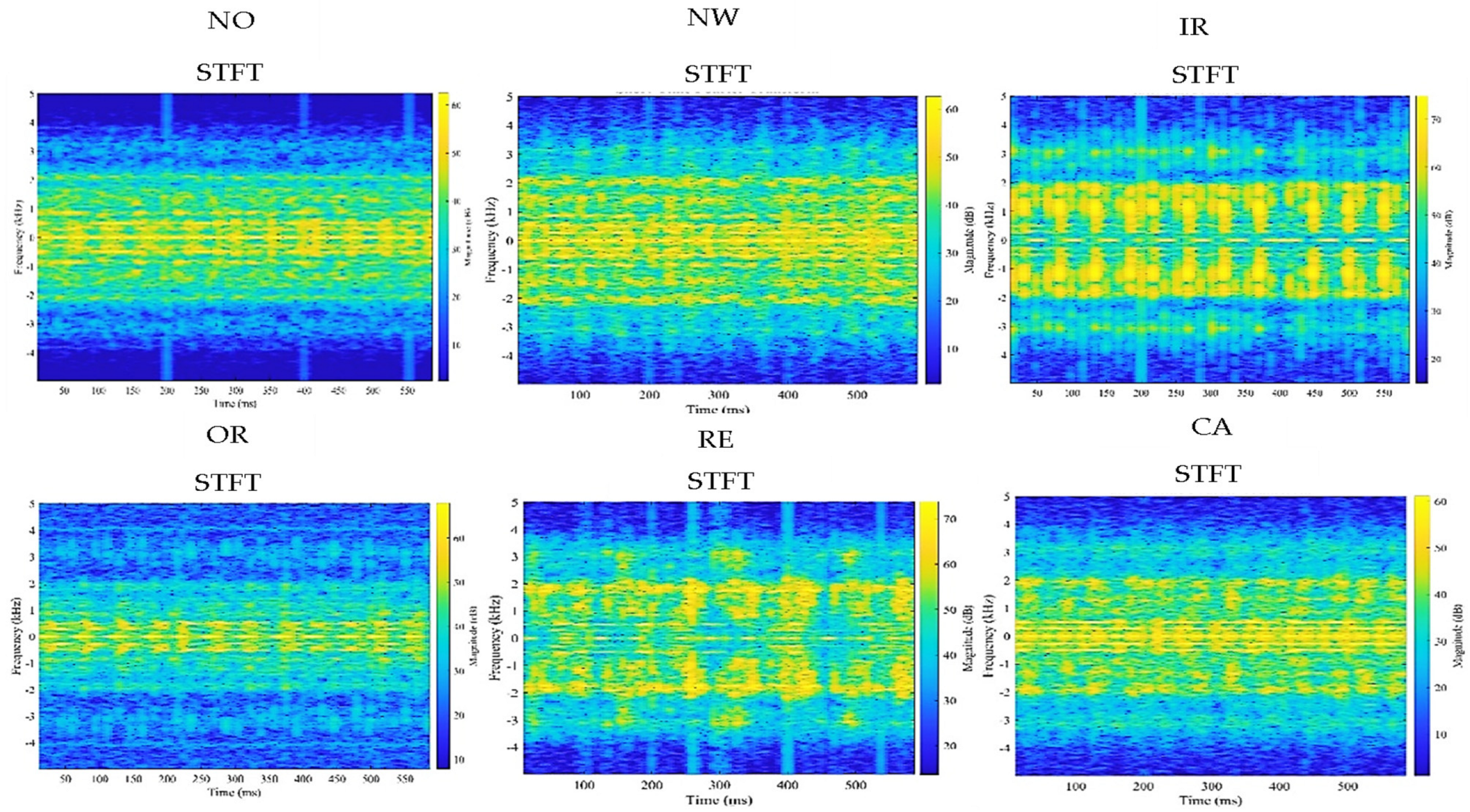
4.1. Short-Time Fourier Transform (STFT)
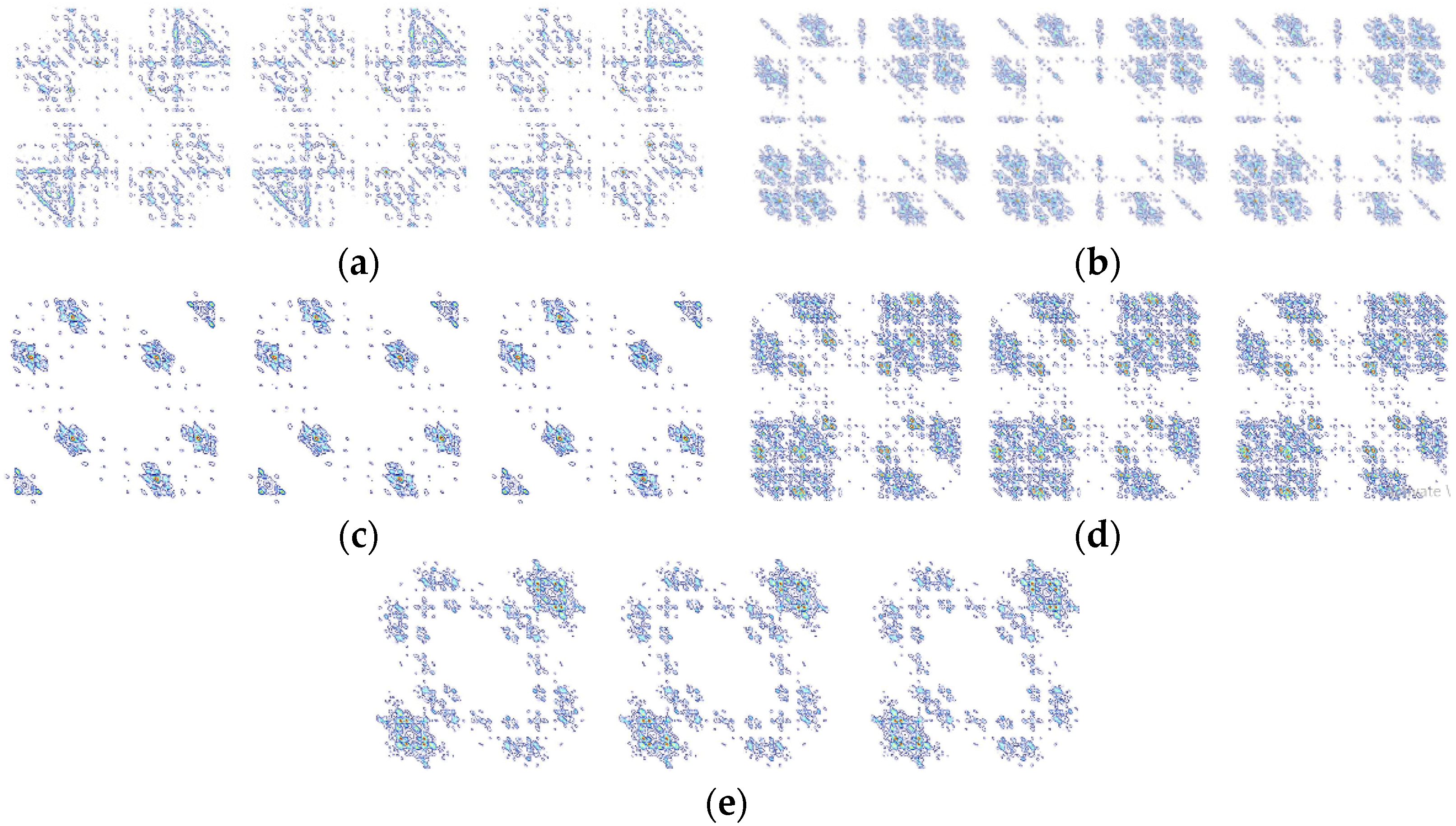
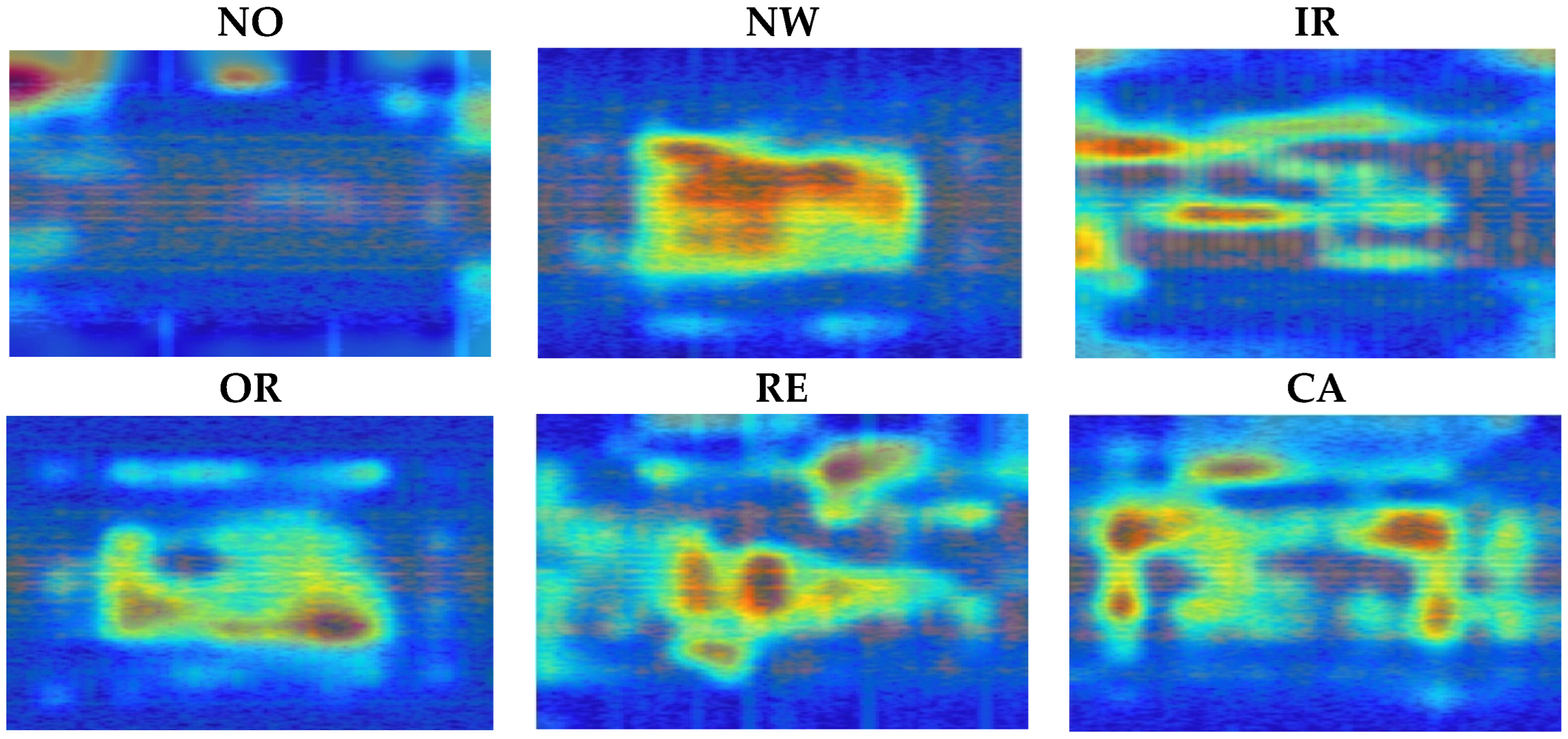
4.1.1. The Grad-CAM Activation Maps for STFT-Based Images
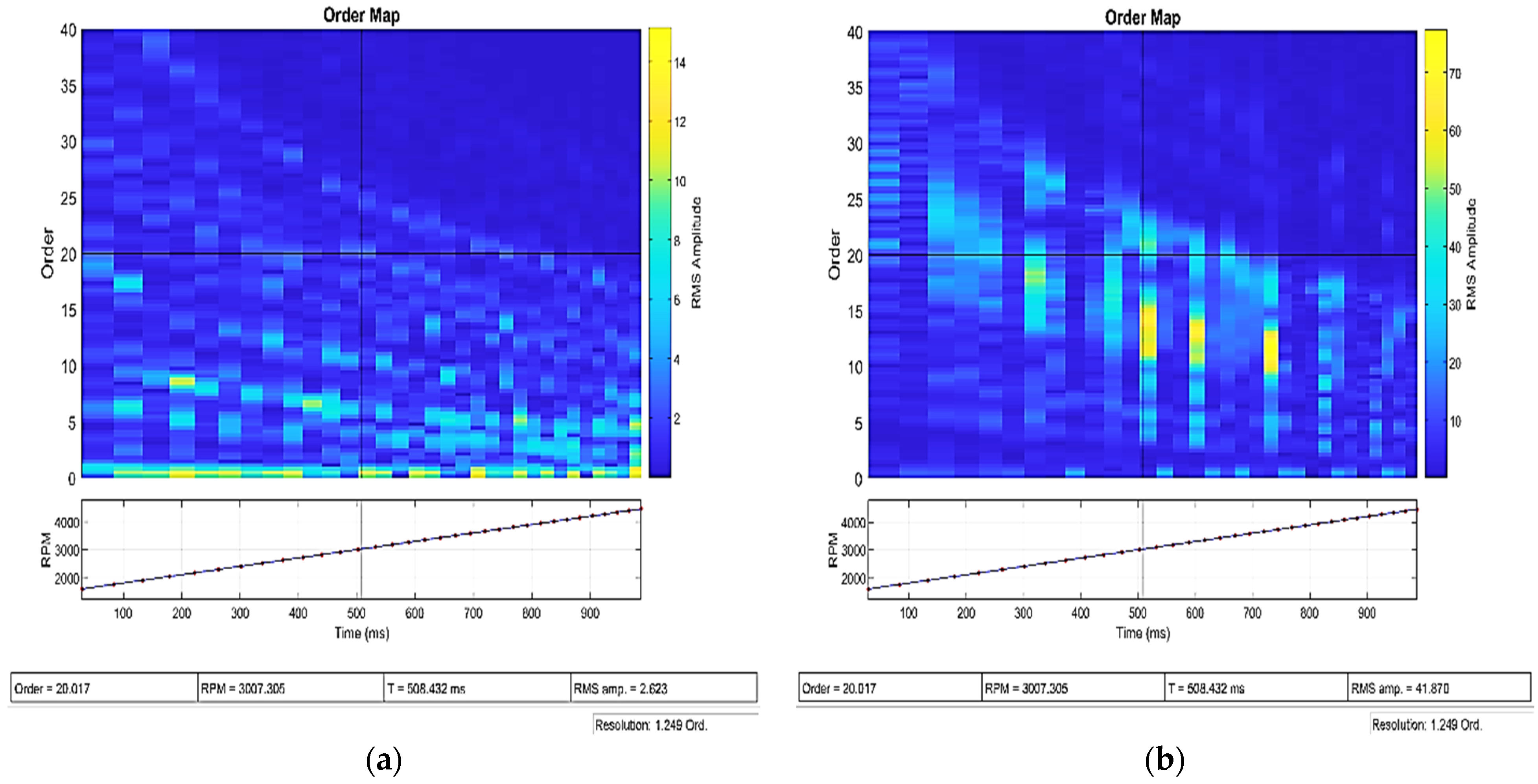
4.1.2. Order Maps
- Tachometer signal processing and rpm extraction.
- Synchronous resampling in the order domain.
- STFT of resampled signal in the order domain.
4.2. Wavelet Transform (WT)
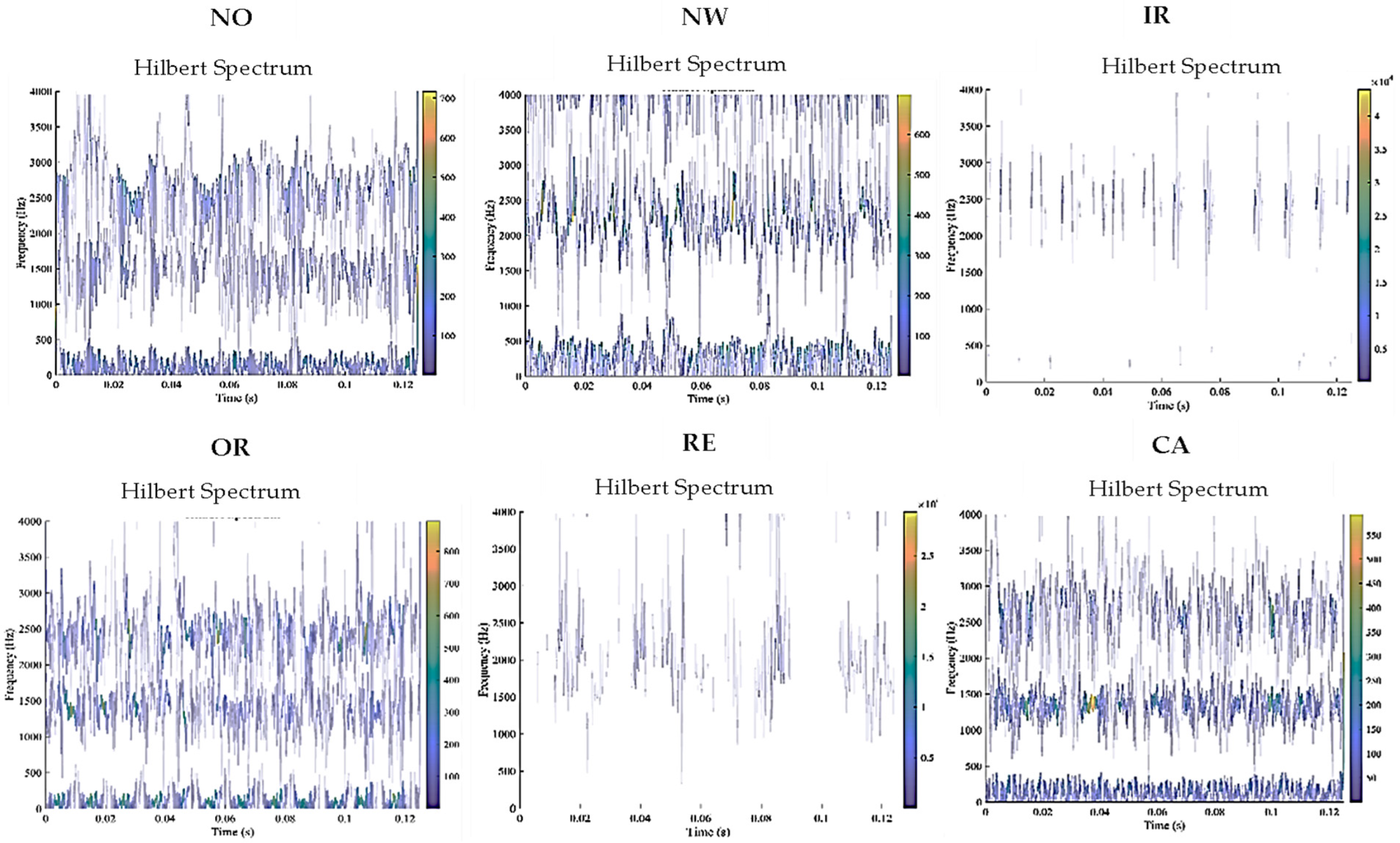
4.3. Hilbert–Huang Transform (HHT)
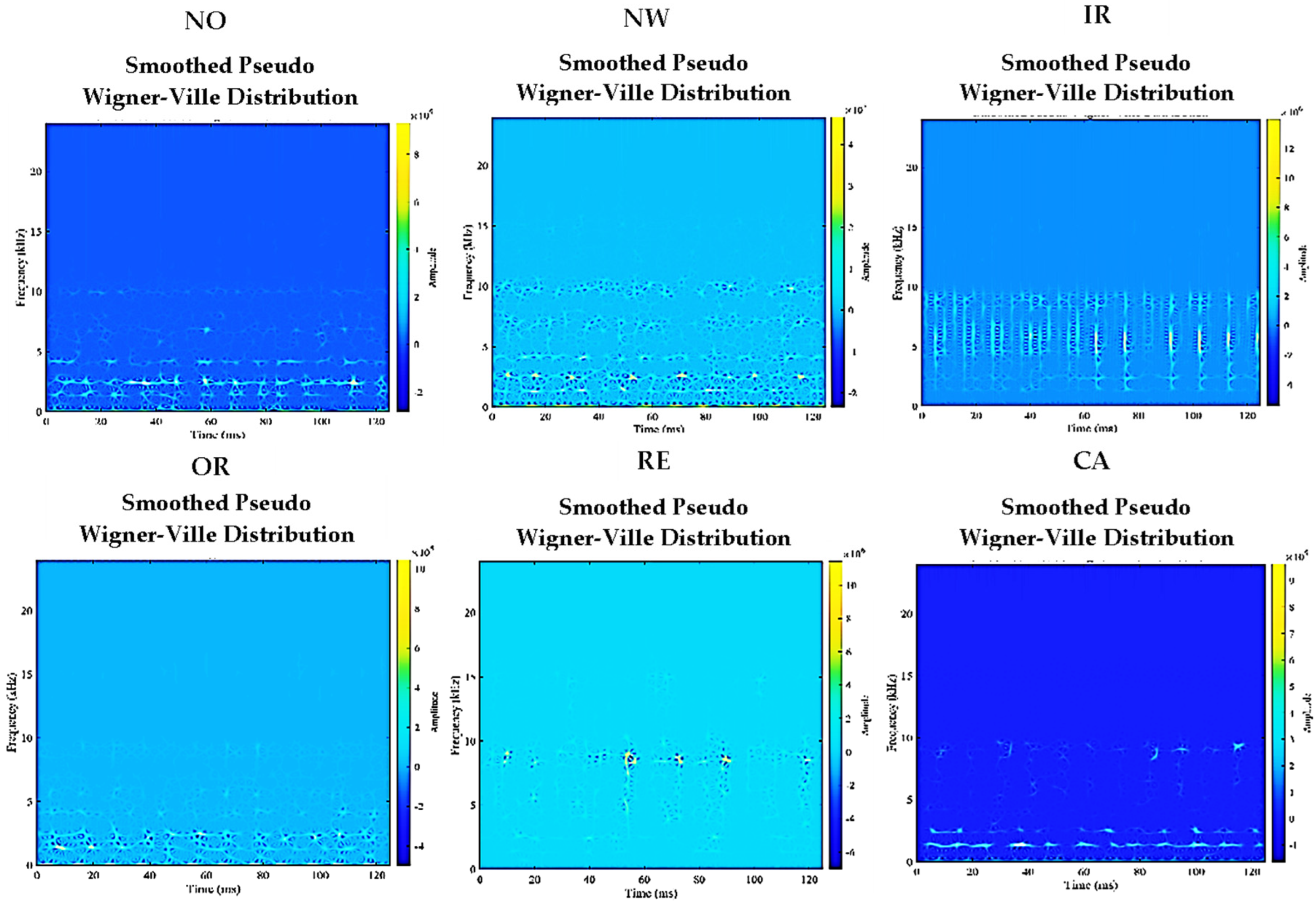
4.4. Wigner–Ville Distribution (WVD)
4.5. Variational Mode Decomposition (VMD)
- Compute the analytic signal using HHT.
- Shift the mode’s frequency spectrum to the baseband.
- Estimate the bandwidth using the Gaussian smoothness of the demodulated signal.
4.6. Stockwell Transform (ST)
4.7. Multi-Domain Fusion Vibration Imaging (MDFVI)
5. Conclusions
- The machine fault diagnosis accuracies are likely to be related to how well the vibration image representations are produced using the various techniques described in this review and to how efficiently they are capable of divulging diverse forms of features for each machine health condition.
- The multi-domain fusion of information features from different domains can generalise the feature space of the vibration-based health condition, which makes it a promising technique to be used for producing vibration images from time series signals.
- The CNN deep learning architecture has been utilised in most of the studies, given its robust performance in image classification.
- Researchers have successfully employed various feature-learning and classification algorithms for fault classification using the produced vibration images. Of these, the deep learning techniques of the CNN-based pre-trained nets for transfer learning, such as ResNet, DenseNet, and LeNet-5, are promising in vibration image-based fault diagnosis. The CNNs have been used extensively with the produced vibration images for their reliability and validity in image classification. They are mainly beneficial for finding patterns in the produced vibration images for detection and classification tasks.
- For further improvement in the performance of CNNs in vibration-based fault diagnosis, future research into the regularization parameters, improvement of the activation functions, development of new loss functions, and construction of new CNN-based network structures will be helpful.
- In most of these studies, the classification accuracy was considered and improved. However, other evaluation measures for the classification model need to be considered, such as recall, precision, F1 score, and ROC graphs.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmed, H.; Nandi, A.K. Condition Monitoring with Vibration Signals: Compressive Sampling and Learning Algorithms for Rotating Machines; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Ahmed, H.; Wong, M.; Nandi, A. Intelligent condition monitoring method for bearing faults from highly compressed measurements using sparse over-complete features. Mech. Syst. Signal Process. 2018, 99, 459–477. [Google Scholar] [CrossRef]
- Ahmed, H.O.A.; Nandi, A.K. Three-Stage Hybrid Fault Diagnosis for Rolling Bearings With Compressively Sampled Data and Subspace Learning Techniques. IEEE Trans. Ind. Electron. 2019, 66, 5516–5524. [Google Scholar] [CrossRef] [Green Version]
- Qu, Y.; He, D.; Yoon, J.; Van Hecke, B.; Bechhoefer, E.; Zhu, J. Gearbox Tooth Cut Fault Diagnostics Using Acoustic Emission and Vibration Sensors—A Comparative Study. Sensors 2014, 14, 1372–1393. [Google Scholar] [CrossRef] [PubMed]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Resendiz-Ochoa, E.; Saucedo-Dorantes, J.J.; Benitez-Rangel, J.P.; Osornio-Rios, R.A.; Morales-Hernandez, L.A. Novel Methodology for Condition Monitoring of Gear Wear Using Supervised Learning and Infrared Thermography. Appl. Sci. 2020, 10, 506. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, H.O.; Wong, M.D.; Nandi, A.K. Classification of bearing faults combining compressive sampling, laplacian score, and support vector machine. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 8053–8058. [Google Scholar]
- Ahmed, H.O.; Wong, M.D.; Nandi, A.K. Effects of deep neural network parameters on classification of bearing faults. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society 2016, Florence, Italy, 24–27 October 2016; pp. 6329–6334. [Google Scholar]
- Seera, M.; Wong, M.D.; Nandi, A.K. Classification of ball bearing faults using a hybrid intelligent model. Appl. Soft Comput. 2017, 57, 427–435. [Google Scholar] [CrossRef]
- Zhang, L.; Nandi, A.K. Fault classification using genetic programming. Mech. Syst. Signal Process. 2007, 21, 1273–1284. [Google Scholar] [CrossRef]
- Jack, L.B.; Nandi, A.K. Support vector machines for detection and characterization of rolling element bearing faults. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2001, 215, 1065–1074. [Google Scholar] [CrossRef]
- Nayana, B.R.; Geethanjali, P. Analysis of Statistical Time-Domain Features Effectiveness in Identification of Bearing Faults From Vibration Signal. IEEE Sens. J. 2017, 17, 5618–5625. [Google Scholar] [CrossRef]
- Sreejith, B.; Verma, A.K.; Srividya, A. Fault diagnosis of rolling element bearing using time-domain features and neural networks. In Proceedings of the IEEE Region 10 and the Third International Conference on Industrial and Information Systems, Kharagpur, India, 8–10 December 2008; Volume 8, pp. 1–6. [Google Scholar]
- Bouguerriou, N.; Haritopoulos, M.; Capdessus, C.; Allam, L. Novel cyclostationarity-based blind source separation algorithm using second order statistical properties: Theory and application to the bearing defect diagnosis. Mech. Syst. Signal Process. 2005, 19, 1260–1281. [Google Scholar] [CrossRef]
- McCormick, A.C.; Nandi, A.K.; Jack, L.B. Application of periodic time-varying autoregressive models to the detection of bearing faults. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1998, 212, 417–428. [Google Scholar] [CrossRef]
- McCormick, A.C.; Nandi, A.K. A comparison of artificial neural networks and other statistical methods for rotating machine condition classification. In Proceedings of the IEE Colloquium on Modeling and Signal Processing for Fault Diagnosis, IET, (Digest No: 1996/260), Leicester, UK, 18 September 1996. [Google Scholar]
- Guo, H.; Jack, L.; Nandi, A. Feature Generation Using Genetic Programming With Application to Fault Classification. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2005, 35, 89–99. [Google Scholar] [CrossRef]
- Elasha, F.; Mba, D.; Ruiz-Carcel, C. A comparative study of adaptive filters in detecting a naturally degraded bearing within a gearbox. Case Stud. Mech. Syst. Signal Process. 2016, 3, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Ahamed, N.; Pandya, Y.; Parey, A. Spur gear tooth root crack detection using time synchronous averaging under fluctuating speed. Measurement 2014, 52, 1–11. [Google Scholar] [CrossRef]
- Ayaz, E. Autoregressive modeling approach of vibration data for bearing fault diagnosis in electric motors. J. Vibroeng. 2014, 16, 2130–2138. [Google Scholar]
- Lin, H.-C.; Ye, Y.-C. Reviews of bearing vibration measurement using fast Fourier transform and enhanced fast Fourier transform algorithms. Adv. Mech. Eng. 2019, 11. [Google Scholar] [CrossRef]
- Farokhzad, S. Vibration Based Fault Detection of Centrifugal Pump by Fast Fourier Transform and Adaptive Neuro-Fuzzy Inference System. J. Mech. Eng. Technol. 2013, 82–87. [Google Scholar] [CrossRef]
- de Jesus Romero-Troncoso, R. Multirate signal processing to improve FFT-based analysis for detecting faults in induction motors. IEEE Trans. Ind. Inform. 2016, 13, 1291–1300. [Google Scholar] [CrossRef]
- McCormick, A.C.; Nandi, A.K. Real-time classification of rotating shaft loading conditions using artificial neural networks. IEEE Trans. Neural Netw. 1997, 8, 748–757. [Google Scholar] [CrossRef]
- Tian, J.; Morillo, C.; Azarian, M.H.; Pecht, M. Motor Bearing Fault Detection Using Spectral Kurtosis-Based Feature Extraction Coupled With K-Nearest Neighbor Distance Analysis. IEEE Trans. Ind. Electron. 2015, 63, 1793–1803. [Google Scholar] [CrossRef]
- Ahmed, H.; Nandi, A.K. Compressive Sampling and Feature Ranking Framework for Bearing Fault Classification With Vibration Signals. IEEE Access 2018, 6, 44731–44746. [Google Scholar] [CrossRef]
- Wang, Y.; Xiang, J.; Markert, R.; Liang, M. Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: A review with applications. Mech. Syst. Signal Process. 2016, 66, 679–698. [Google Scholar] [CrossRef]
- Shakya, P.; Darpe, A.K.; Kulkarni, M.S. Vibration-based fault diagnosis in rolling element bearings: Ranking of various time, frequency and time-frequency domain data-based damage identi cation parameters. Int. J. Cond. Monit. 2013, 3, 53–62. [Google Scholar] [CrossRef]
- Wang, H.; Chen, P. Fuzzy Diagnosis Method for Rotating Machinery in Variable Rotating Speed. IEEE Sens. J. 2010, 11, 23–34. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Z.; Miao, Q.; Zhang, X. Time–frequency analysis based on ensemble local mean decomposition and fast kurtogram for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2018, 103, 60–75. [Google Scholar] [CrossRef]
- Yu, J.; Lv, J. Weak Fault Feature Extraction of Rolling Bearings Using Local Mean Decomposition-Based Multilayer Hybrid Denoising. IEEE Trans. Instrum. Meas. 2017, 66, 3148–3159. [Google Scholar] [CrossRef]
- Halim, E.B.; Shah, S.L.; Zuo, M.J.; Choudhury, M.S. Fault detection of gearbox from vibration signals using time-frequency domain averaging. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 1–6. [Google Scholar]
- Pandhare, V.; Singh, J.; Lee, J. Convolutional Neural Network Based Rolling-Element Bearing Fault Diagnosis for Naturally Occurring and Progressing Defects Using Time-Frequency Domain Features. In Proceedings of the 2019 Prognostics and System Health Management Conference (PHM-Paris), Paris, France, 2–5 May 2019; pp. 320–326. [Google Scholar]
- Staszewski, W.; Worden, K.; Tomlinson, G. Time–frequency analysis in gearbox fault detection using the wigner–ville distribution and pattern recognition. Mech. Syst. Signal Process. 1997, 11, 673–692. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72–73, 303–315. [Google Scholar] [CrossRef]
- Ahmed, H.O.A.; Nandi, A.K. Connected Components-based Colour Image Representations of Vibrations for a Two-stage Fault Diagnosis of Roller Bearings Using Convolutional Neural Networks. Chin. J. Mech. Eng. 2021, 34, 1–21. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Garcia-Ramirez, A.G.; Morales-Hernandez, L.A.; Osornio-Rios, R.A.; Benitez-Rangel, J.P.; Garcia-Perez, A.; Romero-Troncoso, R.D.J. Fault detection in induction motors and the impact on the kinematic chain through thermographic analysis. Electr. Power Syst. Res. 2014, 114, 1–9. [Google Scholar] [CrossRef]
- Bagavathiappan, S.; Lahiri, B.; Saravanan, T.; Philip, J.; Jayakumar, T. Infrared thermography for condition monitoring—A review. Infrared Phys. Technol. 2013, 60, 35–55. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Antonino-Daviu, J.A.; de Jesus Romero-Troncoso, R. Recent Industrial Applications of Infrared Thermography: A Review. IEEE Trans. Ind. Inform. 2019, 15, 615–625. [Google Scholar] [CrossRef]
- Sun, H.X.; Zhang, Y.H.; Luo, F.L. Visual inspection of surface crack on labyrinth disc in aeroengine. Opt. Precis. Eng. 2009, 17, 1187–1195. [Google Scholar]
- Ravikumar, S.; Ramachandran, K.; Sugumaran, V. Machine learning approach for automated visual inspection of machine components. Expert Syst. Appl. 2011, 38, 3260–3266. [Google Scholar] [CrossRef]
- Chauhan, V.; Surgenor, B. A Comparative Study of Machine Vision Based Methods for Fault Detection in an Automated Assembly Machine. Procedia Manuf. 2015, 1, 416–428. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zhou, F.; He, Y. Vision-based fault inspection of small mechanical components for train safety. IET Intell. Transp. Syst. 2016, 10, 130–139. [Google Scholar] [CrossRef]
- Karakose, M.; Yaman, O.; Baygin, M.; Murat, K.; Akın, E. A New Computer Vision Based Method for Rail Track Detection and Fault Diagnosis in Railways. Int. J. Mech. Eng. Robot. Res. 2017, 6, 22–27. [Google Scholar] [CrossRef]
- Ren, Z.; Fang, F.; Yan, N.; Wu, Y. State of the art in defect detection based on machine vision. Int. J. Precis. Eng. Manuf.-Green Technol. 2021, 9, 661–691. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C. Bearings Fault Diagnosis Based on Convolutional Neural Networks with 2-D Representation of Vibration Signals as Input. MATEC Web Conf. 2017, 95, 13001. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, K.; Kaya, Y.; Kuncan, M.; Minaz, M.R.; Ertunç, H.M. An improved feature extraction method using texture analysis with LBP for bearing fault diagnosis. Appl. Soft Comput. 2020, 87, 106019. [Google Scholar] [CrossRef]
- Uddin, J.; Kang, M.; Nguyen, D.V.; Kim, J.-M. Reliable Fault Classification of Induction Motors Using Texture Feature Extraction and a Multiclass Support Vector Machine. Math. Probl. Eng. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- Tang, H.; Gao, S.; Wang, L.; Li, X.; Li, B.; Pang, S. A Novel Intelligent Fault Diagnosis Method for Rolling Bearings Based on Wasserstein Generative Adversarial Network and Convolutional Neural Network under Unbalanced Dataset. Sensors 2021, 21, 6754. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.A.; Kim, J.-M. Automated Bearing Fault Diagnosis Using 2D Analysis of Vibration Acceleration Signals under Variable Speed Conditions. Shock Vib. 2016, 2016, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Guo, Z.; Zhang, L.; Zhang, D. A Completed Modeling of Local Binary Pattern Operator for Texture Classification. IEEE Trans. Image Process. 2010, 19, 1657–1663. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Li, S.; Song, L.; Cui, L. A novel convolutional neural network based fault recognition method via image fusion of multi-vibration-signals. Comput. Ind. 2018, 105, 182–190. [Google Scholar] [CrossRef]
- Wang, Z.; Oates, T. Encoding time series as images for visual inspection and classification using tiled convolutional neural networks. In Proceedings of the Workshops at the Twenty-Ninth AAAI Conference on Artificial Intelligence 2015, Austin, TX, USA, 25–30 January 2015; pp. 1–7. [Google Scholar]
- Garcia, G.R.; Michau, G.; Ducoffe, M.; Gupta, J.S.; Fink, O. Time series to images: Monitoring the condition of industrial assets with deep learning image processing algorithms. arXiv 2020, arXiv:2005.07031. [Google Scholar]
- Han, B.; Zhang, H.; Sun, M.; Wu, F. A New Bearing Fault Diagnosis Method Based on Capsule Network and Markov Transition Field/Gramian Angular Field. Sensors 2021, 21, 7762. [Google Scholar] [CrossRef]
- Yan, J.; Kan, J.; Luo, H. Rolling Bearing Fault Diagnosis Based on Markov Transition Field and Residual Network. Sensors 2022, 22, 3936. [Google Scholar] [CrossRef]
- Jp, E. Recurrence plots of dynamical systems. Europhys. Lett. 1987, 5, 973–977. [Google Scholar]
- Souza, V.M.; Silva, D.F.; Batista, G.E. Extracting texture features for time series classification. In Proceedings of the 2014 22nd International Conference on Pattern Recognition IEEE, Stockholm, Sweden, 24–28 August 2014; pp. 1425–1430. [Google Scholar]
- Kecik, K.; Smagala, A.; Lyubitska, K. Ball Bearing Fault Diagnosis Using Recurrence Analysis. Materials 2022, 15, 5940. [Google Scholar] [CrossRef]
- Yan, X.; Sun, Z.; Zhao, J.; Shi, Z.; Zhang, C.-A. Fault Diagnosis of Active Magnetic Bearing–Rotor System via Vibration Images. Sensors 2019, 19, 244. [Google Scholar] [CrossRef] [Green Version]
- Medina, R.; Macancela, J.-C.; Lucero, P.; Cabrera, D.; Cerrada, M.; Sánchez, R.-V.; Vásquez, R.E. Vibration signal analysis using symbolic dynamics for gearbox fault diagnosis. Int. J. Adv. Manuf. Technol. 2019, 104, 2195–2214. [Google Scholar] [CrossRef]
- Hamadache, M.; Lee, D.; Mucchi, E.; Dalpiaz, G. Vibration-Based Bearing Fault Detection and Diagnosis via Image Recognition Technique Under Constant and Variable Speed Conditions. Appl. Sci. 2018, 8, 1392. [Google Scholar] [CrossRef]
- Pichler, K.; Ooijevaar, T.; Hesch, C.; Kastl, C.; Hammer, F. Data-driven vibration-based bearing fault diagnosis using non-steady-state training data. J. Sens. Sens. Syst. 2020, 9, 143–155. [Google Scholar] [CrossRef]
- Igba, J.; Alemzadeh, K.; Durugbo, C.; Eiriksson, E.T. Analysing RMS and peak values of vibration signals for condition monitoring of wind turbine gearboxes. Renew. Energy 2016, 91, 90–106. [Google Scholar] [CrossRef] [Green Version]
- Nagel, L.; Galeazzi, R.; Voigt, A.J.; Santos, I.F. Fault diagnosis of active magnetic bearings based on Gaussian GLRT detector. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 540–547. [Google Scholar] [CrossRef] [Green Version]
- Yip, L. Analysis and Modeling of Planetary Gearbox Vibration Data for Early Fault Detection; University of Toronto: Toronto, ON, Canada, 2011. [Google Scholar]
- Asnaashari, E.; Sinha, J.K. Crack detection in structures using deviation from normal distribution of measured vibration responses. J. Sound Vib. 2014, 333, 4139–4151. [Google Scholar] [CrossRef]
- Li, W.; Qiu, M.; Zhu, Z.; Wu, B.; Zhou, G. Bearing fault diagnosis based on spectrum images of vibration signals. Meas. Sci. Technol. 2016, 27, 035005. [Google Scholar] [CrossRef]
- Diniz, P.S.R.; da Silva, E.A.B.; Netto, S.L. Digital Signal Processing System Analysis and Design; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar] [CrossRef]
- Cochran, W.T.; Cooley, J.W.; Favin, D.L.; Helms, H.D.; Kaenel, R.A.; Lang, W.W.; Maling, G.C.; Nelson, D.E.; Rader, C.M.; Welch, P.D. What is the fast Fourier transform? Proc. IEEE 1967, 55, 1664–1674. [Google Scholar] [CrossRef]
- Liang, P.; Deng, C.; Wu, J.; Yang, Z.; Zhu, J. Intelligent fault diagnosis of rolling element bearing based on convolutional neural network and frequency spectrograms. In Proceedings of the 2019 IEEE International Conference on Prognostics and Health Management (ICPHM), San Francisco, CA, USA, 17–20 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Amar, M.; Gondal, I.; Wilson, C. Vibration Spectrum Imaging: A Novel Bearing Fault Classification Approach. IEEE Trans. Ind. Electron. 2014, 62, 494–502. [Google Scholar] [CrossRef]
- Youcef Khodja, A.; Guersi, N.; Saadi, M.N.; Boutasseta, N. Rolling element bearing fault diagnosis for rotating machinery using vibration spectrum imaging and convolutional neural networks. Int. J. Adv. Manuf. Technol. 2020, 106, 1737–1751. [Google Scholar] [CrossRef]
- Khanna, S.; Huang, G.; Qiao, L.; Pavlovich, P.A.; Tiwari, S. Research on fan vibration fault diagnosis based on image recognition. J. Vibroeng. 2021, 23, 1366–1382. [Google Scholar] [CrossRef]
- Qiu, M.; Li, W.; Zhu, Z.; Jiang, F.; Zhou, G. Fault Diagnosis of Bearings with Adjusted Vibration Spectrum Images. Shock Vib. 2018, 2018, 1–17. [Google Scholar] [CrossRef]
- Zhang, L.; Jack, L.B.; Nandi, A.K. Fault detection using genetic programming. Mech. Syst. Signal Process. 2005, 19, 271–289. [Google Scholar] [CrossRef]
- Nikias, C.; Mendel, J. Signal processing with higher-order spectra. IEEE Signal Process. Mag. 1993, 10, 10–37. [Google Scholar] [CrossRef]
- McCormick, A.C.; Nandi, A.K. Bispectral and trispectral features for machine condition diagnosis. IEE Proc.-Vis. Image Signal Process. 1999, 146, 229–234. [Google Scholar] [CrossRef]
- Lu, C.; Wang, Y.; Ragulskis, M.; Cheng, Y. Fault Diagnosis for Rotating Machinery: A Method based on Image Processing. PLoS ONE 2016, 11, e0164111. [Google Scholar] [CrossRef] [Green Version]
- Cohen, L. Time-Frequency Analysis; Prentice Hall: Hoboken, NJ, USA, 1995. [Google Scholar]
- Wu, H.; Huang, A.; Sutherland, J.W. Condition-Based Monitoring and Novel Fault Detection Based on Incremental Learning Applied to Rotary Systems. Procedia CIRP 2022, 105, 788–793. [Google Scholar] [CrossRef]
- Zhu, Z.; Peng, G.; Chen, Y.; Gao, H. A convolutional neural network based on a capsule network with strong generalization for bearing fault diagnosis. Neurocomputing 2019, 323, 62–75. [Google Scholar] [CrossRef]
- Zhang, Y.; Xing, K.; Bai, R.; Sun, D.; Meng, Z. An enhanced convolutional neural network for bearing fault diagnosis based on time–frequency image. Measurement 2020, 157, 107667. [Google Scholar] [CrossRef]
- Alexakos, C.; Karnavas, Y.; Drakaki, M.; Tziafettas, I. A Combined Short Time Fourier Transform and Image Classification Transformer Model for Rolling Element Bearings Fault Diagnosis in Electric Motors. Mach. Learn. Knowl. Extr. 2021, 3, 228–242. [Google Scholar] [CrossRef]
- Jian, B.-L.; Su, X.-Y.; Yau, H.-T. Bearing Fault Diagnosis Based on Chaotic Dynamic Errors in Key Components. IEEE Access 2021, 9, 53509–53517. [Google Scholar] [CrossRef]
- Huang, Z.; Zhu, J.; Lei, J.; Li, X.; Tian, F. Tool Wear Monitoring with Vibration Signals Based on Short-Time Fourier Transform and Deep Convolutional Neural Network in Milling. Math. Probl. Eng. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Chen, H.-Y.; Lee, C.-H. Deep Learning Approach for Vibration Signals Applications. Sensors 2021, 21, 3929. [Google Scholar] [CrossRef]
- Liefstingh, M.; Taal, C.; Restrepo, S.E.; Azarfar, A. Interpretation of Deep Learning Models in Bearing Fault Diagnosis. In Proceedings of the Annual Conference of the PHM Society, Virtual, 29 November–2 December 2021; Volume 13, pp. 1–9. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.-Y.; Lee, C.-H. Vibration Signals Analysis by Explainable Artificial Intelligence (XAI) Approach: Application on Bearing Faults Diagnosis. IEEE Access 2020, 8, 134246–134256. [Google Scholar] [CrossRef]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and< 0.5 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Tayyab, S.M.; Chatterton, S.; Pennacchi, P. Intelligent Defect Diagnosis of Rolling Element Bearings under Variable Operating Conditions Using Convolutional Neural Network and Order Maps. Sensors 2022, 22, 2026. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inf. Theory 1990, 36, 961–1005. [Google Scholar] [CrossRef] [Green Version]
- Burrus, C.S.; Gopinath, R.A.; Guo, H.; Odegard, J.E.; Selesnick, I.W. Introduction to Wavelets and Wavelet Transforms a Primer; Prentice Hall: Hoboken, NJ, USA, 1998; Volume 1. [Google Scholar]
- Saxena, M.; Bannet, O.O.; Gupta, M.; Rajoria, R. Bearing Fault Monitoring Using CWT Based Vibration Signature. Procedia Eng. 2016, 144, 234–241. [Google Scholar] [CrossRef] [Green Version]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef] [Green Version]
- Mertins, A.; Mertins, D.A. Signal Analysis: Wavelets, Filter Banks, Time-Frequency Transforms and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1999. [Google Scholar]
- Shen, C.; Wang, D.; Kong, F.; Tse, P.W. Fault diagnosis of rotating machinery based on the statistical parameters of wavelet packet paving and a generic support vector regressive classifier. Measurement 2013, 46, 1551–1564. [Google Scholar] [CrossRef]
- Shi, H.; Chen, J.; Si, J.; Zheng, C. Fault Diagnosis of Rolling Bearings Based on a Residual Dilated Pyramid Network and Full Convolutional Denoising Autoencoder. Sensors 2020, 20, 5734. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Liu, M.; Jiang, Z.; Söffker, D.; Shen, W. Bearing Fault Diagnosis Method Based on Deep Convolutional Neural Network and Random Forest Ensemble Learning. Sensors 2019, 19, 1088. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, S.; Yuan, S.; Zhu, Y.; Li, G. An Integrated Deep Learning Method towards Fault Diagnosis of Hydraulic Axial Piston Pump. Sensors 2020, 20, 6576. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.-C.; Hoang, D.-T.; Tran, X.-T.; Van, M.; Kang, H.-J. A Bearing Fault Diagnosis Method Using Multi-Branch Deep Neural Network. Machines 2021, 9, 345. [Google Scholar] [CrossRef]
- Huang, N.E. Hilbert-Huang Transform and Its Applications; World Scientific: Singapore, 2014. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Verstraete, D.; Ferrada, A.; Droguett, E.L.; Meruane, V.; Modarres, M. Deep Learning Enabled Fault Diagnosis Using Time-Frequency Image Analysis of Rolling Element Bearings. Shock Vib. 2017, 2017, 5067651. [Google Scholar] [CrossRef] [Green Version]
- Wigner, E. On the Quantum Correction For Thermodynamic Equilibrium. Phys. Rev. 1932, 40, 749–759. [Google Scholar] [CrossRef]
- Singru, P.; Krishnakumar, V.; Natarajan, D.; Raizada, A. Bearing failure prediction using Wigner-Ville distribution, modified Poincare mapping and fast Fourier transform. J. Vibroeng. 2018, 20, 127–137. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Wang, L.; Yu, H.; Wang, D.; Nandi, A.K. Utilizing SVD and VMD for Denoising Non-Stationary Signals of Roller Bearings. Sensors 2021, 22, 195. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, C.; Wan, H.; Deng, D.; Nandi, A.K. Bearing fault diagnosis based on optimized variational mode decomposition and 1D convolutional neural networks. Meas. Sci. Technol. 2021, 32, 104007. [Google Scholar] [CrossRef]
- ur Rehman, N.; Aftab, H. Multivariate variational mode decomposition. IEEE Trans. Signal Process. 2019, 67, 6039–6052. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.L. Intelligent fault diagnosis and forecast of time-varying bearing based on deep learning VMD-DenseNet. Sensors 2021, 21, 7467. [Google Scholar] [CrossRef]
- Lin, S.-L. Application Combining VMD and ResNet101 in Intelligent Diagnosis of Motor Faults. Sensors 2021, 21, 6065. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Pang, Y.; Kuai, M. Planetary Gear Fault Diagnosis via Feature Image Extraction Based on Multi Central Frequencies and Vibration Signal Frequency Spectrum. Sensors 2018, 18, 1735. [Google Scholar] [CrossRef] [Green Version]
- Zheng, S.; Zhong, Q.; Chen, X.; Peng, L.; Cui, G. The Rail Surface Defects Recognition via Operating Service Rail Vehicle Vibrations. Machines 2022, 10, 796. [Google Scholar] [CrossRef]
- Wang, Y.; Orchard, J. Fast Discrete Orthonormal Stockwell Transform. SIAM J. Sci. Comput. 2009, 31, 4000–4012. [Google Scholar] [CrossRef]
- Hasan, M.J.; Kim, J.M. Bearing fault diagnosis under variable rotational speeds using stockwell transform-based vibration imaging and transfer learning. Appl. Sci. 2018, 8, 2357. [Google Scholar] [CrossRef] [Green Version]
- Hasan, J.; Islam, M.M.M.; Kim, J.-M. Bearing Fault Diagnosis Using Multidomain Fusion-Based Vibration Imaging and Multitask Learning. Sensors 2021, 22, 56. [Google Scholar] [CrossRef]
- Dong, H.; Lu, J.; Han, Y. Multi-Stream Convolutional Neural Networks for Rotating Machinery Fault Diagnosis under Noise and Trend Items. Sensors 2022, 22, 2720. [Google Scholar] [CrossRef] [PubMed]
- Radosavovic, I.; Kosaraju, R.P.; Girshick, R.; He, K.; Dollár, P. Designing network design spaces. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2020, Seattle, WA, USA, 13–19 June 2020; pp. 10428–10436. [Google Scholar]
- Tan, M.; Le, Q. Efficientnet: Rethinking model scaling for convolutional neural networks. In Proceedings of the International Conference on Machine Learning 2019, Long Beach, CA, USA, 9–15 June 2019; pp. 6105–6114. [Google Scholar]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for mobilenetv3. In Proceedings of the IEEE/CVF International Conference on Computer Vision 2019, Seoul, Republic of Korea, 27–28 October 2019; pp. 1314–1324. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | VIR Technique | Feature Learning and Classification Method | RM Component | Dataset | Best Test Accuracies (%) |
|---|---|---|---|---|---|
| [36] | RGBVI | CNN | Bearing | f = 12 kHz and 48 kHz classes = 10 loads = 3 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 99.9 |
| [47] | Grayscale image | CNN | Bearing | f = 12 kHz classes = 10 loads = 3 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 99.95 98.17 |
| [48] | Grayscale image + LBP | RF, k-NN, naive Bayes, Bayes net, ANN | Bearing | f = 24 kHz classes = 3 | 100 |
| [49] | Grayscale image + DNS | SVM | Motor faults | classes = 88 | 100 |
| [50] | Grayscale image | WGAN-GP + SECNN | Bearing | f = 12 kHz classes = 10 loads = 3 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 99.6 |
| [51] | Rectified signal + LBP | k-NN | Bearing | f = 12 kHz classes = 4 loads = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 |
| [53] | Multi-sensor data fusion | MB-CNN | Bearing and Gear | - | 99.47 |
| [55] | GAF MTF RP | CNN | Flight test helicopters Vibration measurements | f = 1.024 kHz classes = 2 Airbus SAS 2018 Link https://www.research-collection.ethz.ch/handle/20.500.11850/415151 (accessed on 18 November 2022) | |
| [56] | GAF MTF | Capsule networks | f = 12 kHz f = 48 kHz classes = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 99.81 99.51 | |
| [57] | MTF | ResNet CNN | f = 12 kHz classes = 10 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 98.5 | |
| [61] | HVI HOVI | Two-layer AdaBoost | AMB–rotor system | f = 25 kHz classes = 4 | 79.5 84.4 |
| [62] | HOVI SDA PSDA | MSVM | Gearbox | f = 50 kHz classes = 10 loads = 3 | 99.2 99.78 |
| [63] | Probability plot | Absolute value principal component analysis (AVPCA) | Bearing | f = 17.06 kHz classes = 3 | 98.22 |
| Ref | VIR Technique | ML Technique | RM Component | Dataset | Best Test Accuracies (%) |
|---|---|---|---|---|---|
| [69] | The FFT spectrum image | Minimum distance criterion based on the Eigen images | Bearing | classes = 4 loads = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 |
| [72] | The FFT spectrum image | CNN | Bearing | f = 12 kHz classes = 12 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 99.5 |
| [73] | The FFT spectrum image based on segmented time series signal | ANN | Bearing | f = 12 kHz classes = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 |
| [74] | The FFT spectrum image based on a segmented time series signal | CNN | Bearing | f = 25.6 kHz classes = 5 Unit of research in advanced materials (URMA) f = 48 kHz classes = 10 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 99.68 |
| [75] | The FFT spectrum image | ANN | Fan | f = 1.6 kHz classes = 4 | 99.01 |
| [76] | Adjusted FFT Spectrum Image | 2DPCA + NNC | Bearing | f = 12 kHz classes = 4 loads = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 |
| [80] | Image representations using bi-spectrum | Probabilistic neural network PNN | Axial piston hydraulic pump and Self-priming centrifugal pumps | f = 10.239 kHz classes = 5 f = 1 kHz classes = 3 | 98.33 98.71 |
| Ref | VIR Technique | ML Technique | RM Component | Dataset | Best Test Accuracies (%) |
|---|---|---|---|---|---|
| [82] | The STFT spectrogram image | CNN-AE | Rotary system | classes = 5 loads = 4 f = 12 kHz | 99.8 |
| [83] | The STFT spectrogram image | CNN based on a capsule network with an inception block (ICN) | Bearing | f = 48 kHz loads = 3 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) and f = 64 kHz loads = 3 Paderborn University, Faculty of Mechanical Engineering https://mb.uni-paderborn.de/en/kat/main-research/datacenter/bearing-datacenter/data-sets-and-download (accessed on 18 November 2022) | 97.15 |
| [84] | The STFT spectrogram image | CNN using the scaled exponential linear unit (SELU) and hierarchical regularization | Bearing | f = 12 kHz classes = 10 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) and f = 12.8 kHz Classes = 4 Yanshan University, Qinhuangdao, Hebei 066004, P. R. China. Bearings dataset collected from a mechanical vibration simulator | 100 97.81 |
| [85] | The STFT spectrogram image | Image classification transformer (ICT) | Bearing | f = 12 kHz classes = 4 loads = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 98.3 |
| [86] | The STFT spectrogram image | CNN | Bearing | f = 97.6 and 48.8 kHz classes = 3 MFPT Link https://www.mfpt.org/fault-data-sets/ (accessed on 18 November 2022) | 94.99 |
| [87] | The STFT spectrogram image | DCNN | High-speed milling machine | f = 50 kHz milling cutters = 3 | |
| [88] | The STFT spectrogram image | 2DCNN | Bearing and Tool wear | f = 12 kHz classes = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) and f = 100 kHz classes = 2 | 100 100 |
| [89] | The Grad-CAM activation maps for STFT-based images | CNN | Bearing | f = 12 kHz classes = 12 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) and f = 100 kHz classes = 7 | 96.9 88 |
| [91] | The Grad-CAM activation maps for STFT-based images | CNN NN ANFIS | Bearing | f = 12 kHz classes = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 100 96.9 |
| [93] | Order maps | CNN | Locomotive rolling element bearings | f = 25.6 kHz classes = 3 and f = 20 kHz classes = 5 | 98.4 98.6 |
| [100] | CWT | RDPN-FCDAE | Bearing | f = 20 kHz classes = 9 | 98.28 |
| [101] | CWT | CNN with LeNet-5 and RF | Bearing | f = 12 kHz classes = 10 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) and f = 20 kHz classes = 4 Tongji University | 99.73 97.38 |
| [102] | CWT | CNN | Hydraulic axial piston pump | f = 24.5 kHz classes = 5 | 98.44 |
| [103] | Grayscale image + Scalogram | DNN | Bearing | f = 12 kHz classes = 10 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 |
| [107] | STFT WT HHT | CNN | Bearing | f = 97.6 classes = 3 MFPT Link https://www.mfpt.org/fault-data-sets/ (accessed on 18 November 2022) | 91.7 99.9 91.7 |
| [109] | WVD | ANN | Bearing | - | - |
| [113] | VMD | DenseNet | Bearing | f = 200 kHz classes = 5 University of Ottawa Link https://data.mendeley.com/datasets/v43hmbwxpm/2 (accessed on 18 November 2022) | 92.0 |
| [114] | VMD | ResNet 101 | Motor | f = 51.2 kHz classes = 6 the Federal University of Rio de Janeiro Link https://www02.smt.ufrj.br/~offshore/mfs/page_01.html#SEC2 (accessed on 18 November 2022) | 94.0 |
| [115] | VMD | CNN | Planetary Gear | f = 12.8 kHz classes = 4 Spectra Quest Company | 98.75 |
| [116] | VMD | DNN | Rail serviced vehicle | f = 12.8 kHz classes = 4 | 99.75 |
| [118] | DOST | CNN | Bearing | f = 12 kHz classes = 6 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 99.8 |
| [119] | MDFVI Multi-domain fusion of grayscale from raw data, FFT, and envelop analysis | MTL-CNN | Bearing | f = 65.536 kHz classes = 4 and f = 12 kHz classes = 4 CWRU BDC Link https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 18 November 2022) | 100 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, H.O.A.; Nandi, A.K. Vibration Image Representations for Fault Diagnosis of Rotating Machines: A Review. Machines 2022, 10, 1113. https://doi.org/10.3390/machines10121113
Ahmed HOA, Nandi AK. Vibration Image Representations for Fault Diagnosis of Rotating Machines: A Review. Machines. 2022; 10(12):1113. https://doi.org/10.3390/machines10121113
Chicago/Turabian StyleAhmed, Hosameldin Osman Abdallah, and Asoke Kumar Nandi. 2022. "Vibration Image Representations for Fault Diagnosis of Rotating Machines: A Review" Machines 10, no. 12: 1113. https://doi.org/10.3390/machines10121113
APA StyleAhmed, H. O. A., & Nandi, A. K. (2022). Vibration Image Representations for Fault Diagnosis of Rotating Machines: A Review. Machines, 10(12), 1113. https://doi.org/10.3390/machines10121113