
A General Pose Recognition Method and Its Accuracy Analysis for 6-Axis External Fixation Mechanism Using Image Markers


Abstract
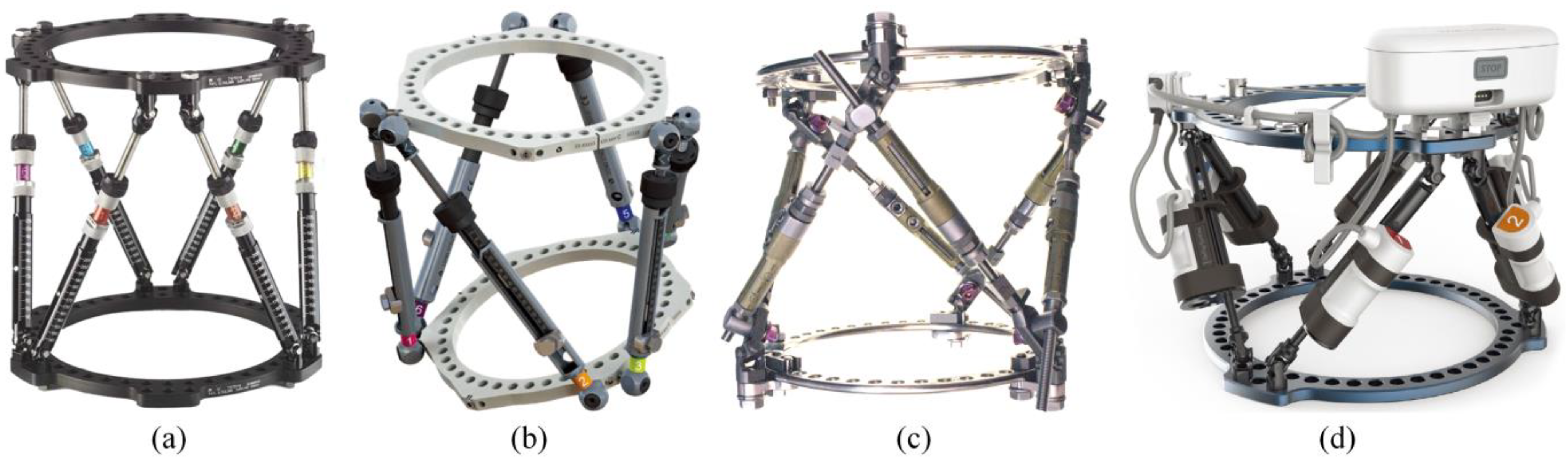
:1. Introduction
2. Descriptions of the Mechanism and Markers
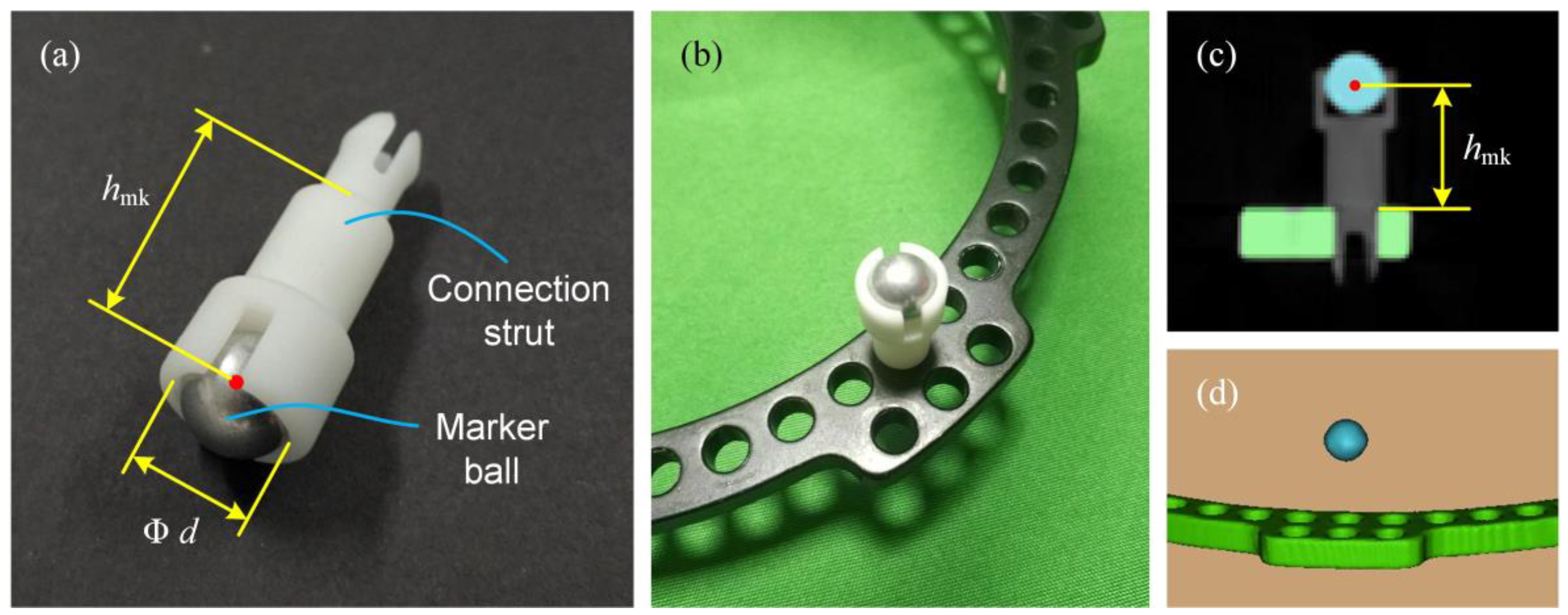
2.1. Image Marker Design
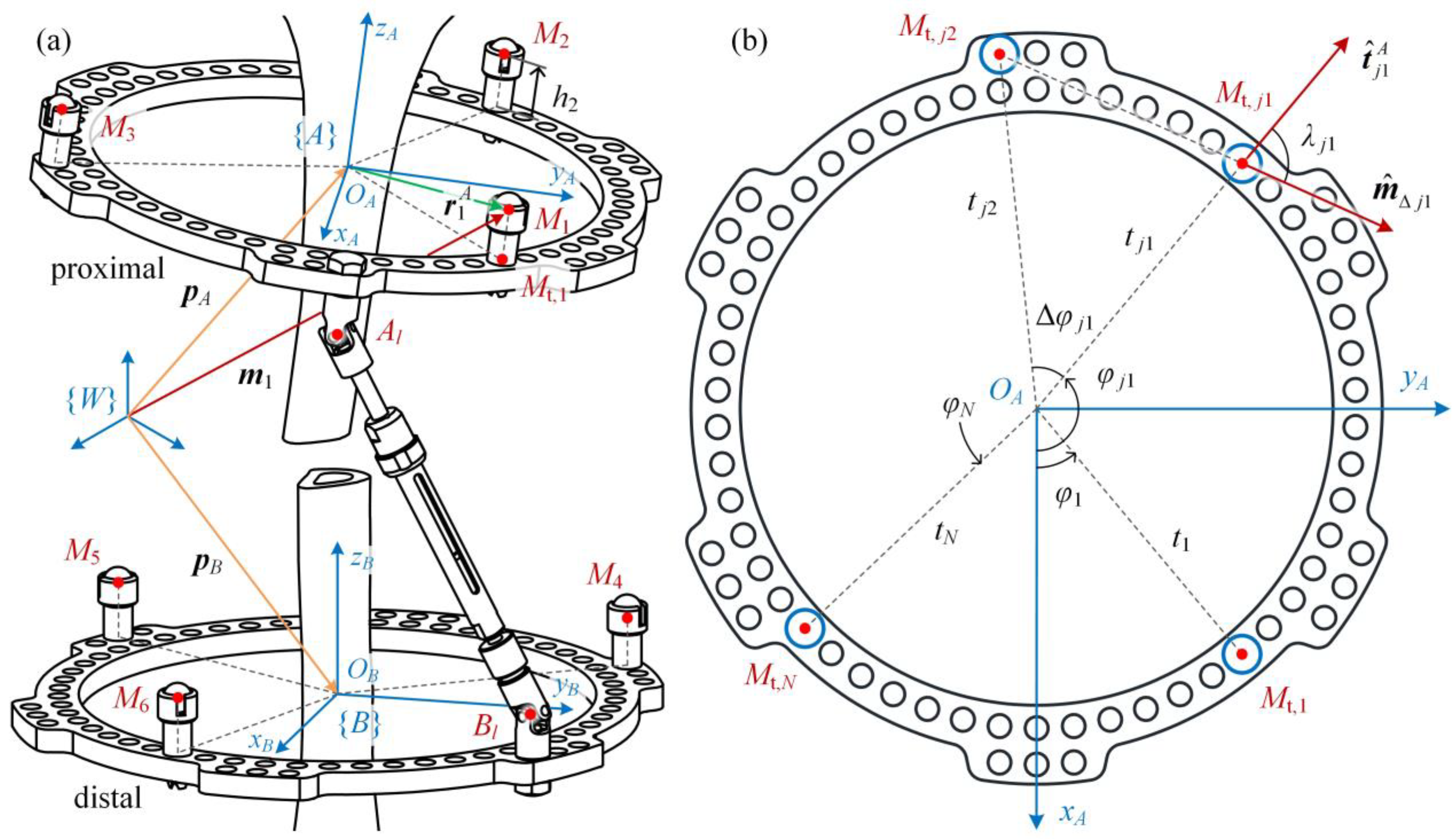
2.2. Pose Description of the Mechanism
2.3. Layout Description of Markers
3. Pose Recognition of the Mechanism
3.1. Establishing Position Relationships of Markers
3.2. Setting Up Marker Groups
3.3. Identifying Pose Parameters of Each Group
3.4. Recognizing the Mechanism’s Pose
4. Marker Layout Principles
4.1. Error Modeling of the Pose Recognition
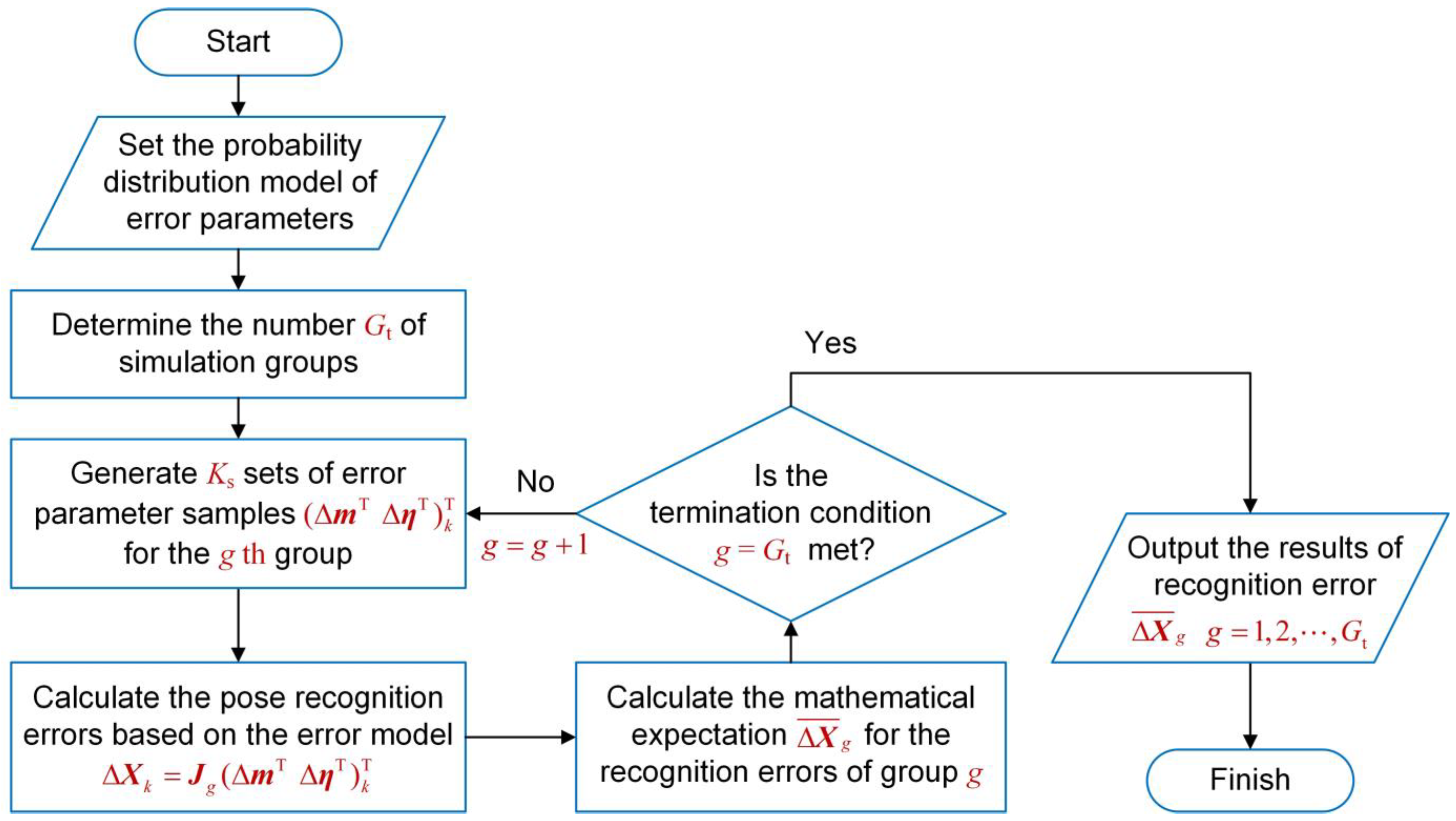
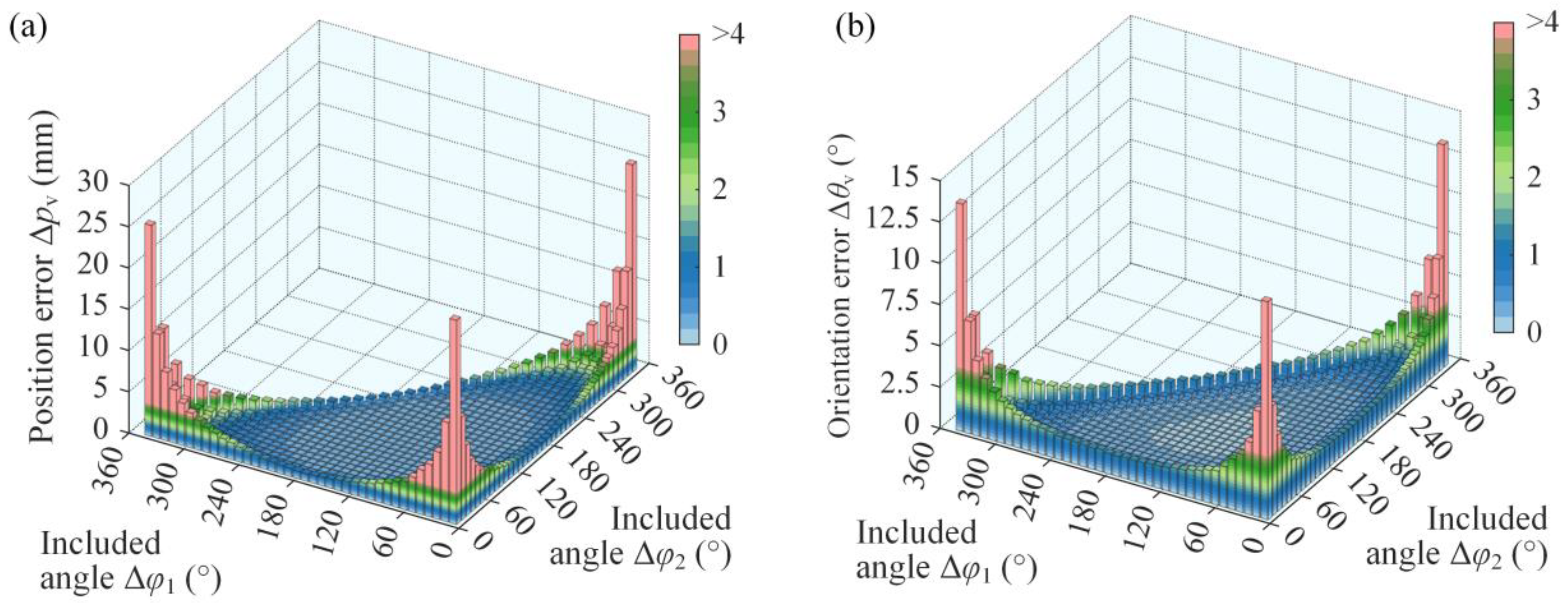
4.2. Analyzing the Effect of Marker Layout Variations
- (1)
- Configure the probability distribution to generate error parameters for each random sampling. A total of simulation groups were set univariately about the marker’s number and sweep angle . For the groups regarding the variation of number, take . For the groups regarding the variation of sweep angle, adopt combinations of discrete angles based on an interval , and ensure that all included angles satisfy the condition .
- (2)
- Generate samples of random error parameters for the simulation group , and calculate the Jacobian matrix for the particular marker layout of this group (given parameters , , and ). The corresponding pose recognition errors of samples are
- (1)
- Take the absolute value of each sample, and calculate their expectation asThe expectation represents the pose recognition accuracy about the marker layout adopted by group .
- (4)
- Repeat steps 2–3 to assess the pose recognition accuracy of all simulation groups. Analyze the trend of pose recognition accuracy versus the variation of layout parameters, and further determine the marker layout principles.
4.3. Determining the Marker Layout Principles
4.3.1. The Number Principle
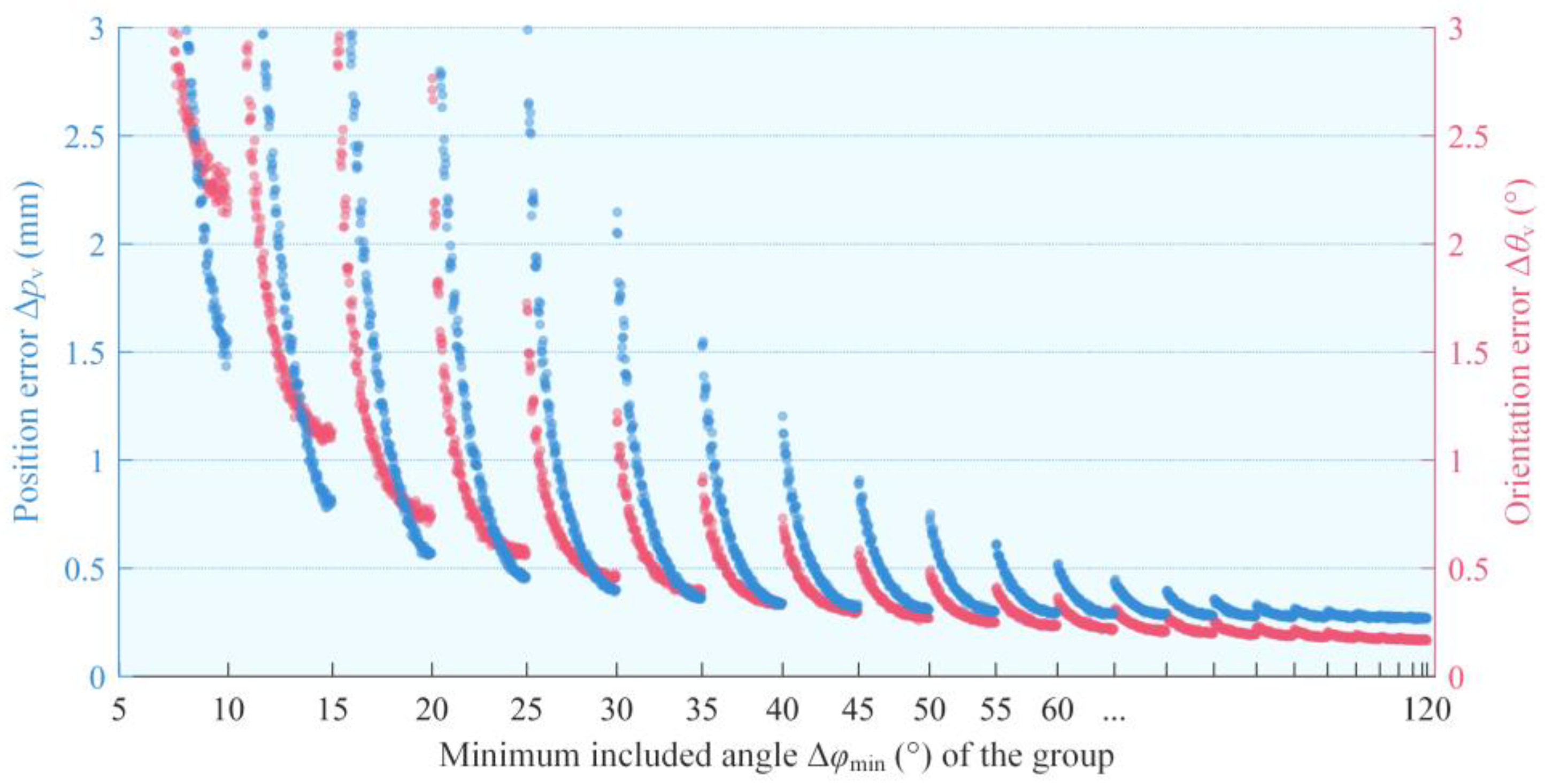
4.3.2. The Sweep Angle Principle
5. Error Compensation Strategy and Experiments
5.1. Compensation for Pose Recognition Errors
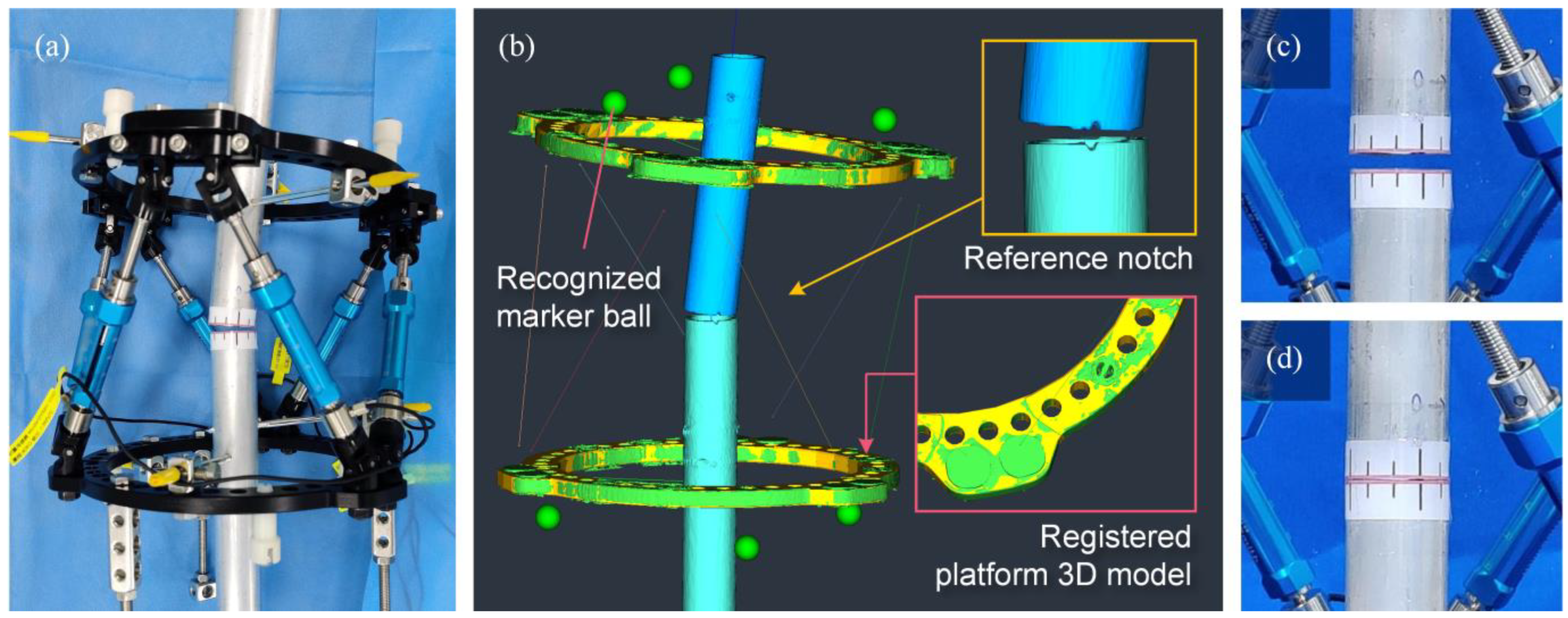
5.2. Model Experiments of Fracture Reduction
- (1)
- Adjust the lengths of limbs 1–6 arbitrarily to construct a random pose of the mechanism, simulating the initial fracture state. Theoretical pose is calculated according to the strut lengths provided by the motor encoders. Meanwhile, the relative initial pose of the cylinders is determined by measuring the point pairs from circumferential scales.
- (2)
- Install the markers following the proposed marker layout principles, and then perform a CT scan and 3D reconstruction of the entire model. The 3D model of the marker balls was obtained by automatic segmentation based on the feature of markers described in Section 2. The 3D models of cylinders and mechanism platforms were used for correction planning in visual, thus they could be obtained easily through approximate manual segmentation. The positions of markers were then identified, and the mechanism’s recognized pose was determined by the proposed pose recognition method. Subsequently, the accuracy of pose recognition was analyzed by calculating the recognition errors . In addition, a visual inspection was performed by registering standard 3D models to the reconstruction models of the platforms, using the recognized poses of frames and .
- (3)
- Using self-developed software, the 3D models of bone segments undergoing reduction motion were manipulated to design the fracture correction plan. The notch on the cylinder served as a reference point for the correction target. The correction motion was determined and the trajectory with target pose was generated. After error compensation, the mechanism executed the compensated trajectory and reduced the fracture model. The effectiveness of fracture reduction was evaluated by measuring the relative final pose of the cylinders.
6. Conclusions
- (1)
- Measuring the pose of 6-axis external fixation mechanism in CT image space served as the foundation of deformity correction planning. The position and orientation parameters were utilized to describe the mechanism’s pose. Image markers were designed and implemented to eliminate subjective measurement errors of pose recognition, and their layout on the mechanism is parametrically described.
- (2)
- Utilizing CT scan and 3D reconstruction, an analytical method was developed for recognizing the mechanism’s pose based on markers. The proposed method encompasses all possible marker layouts that can be implemented in practice, thereby expanding its applicability. In addition, the proposed method has more stable parameter identification compared to numerical methods.
- (3)
- The geometric error model of pose recognition was established. The effect of marker layout variations on the pose recognition errors were investigated. Based on the Monte Carlo method, the probability distribution of error parameters was set, and the single-factor analysis of layout parameters was carried out. The principles of marker layout were established to guide clinical application.
- (4)
- Ten groups of fracture model reduction experiments were conducted. A self-developed 6-axis external fixation mechanism was utilized to execute deformity correction. The results showed that the maximum errors of pose recognition were in position and in orientation, and the average accuracy of correction was 0.214 ± 0.573 mm and −0.031 ± 0.161° after compensation. It was demonstrated that the pose recognition method and accuracy improvements could achieve precise and safe correction of bone deformities.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Taylor, J.C. Perioperative Planning for Two- and Three-Plane Deformities. Foot Ankle Clin. 2008, 13, 69–121. [Google Scholar] [CrossRef] [PubMed]
- Ferreira, N.; Birkholtz, F. Radiographic analysis of hexapod external fixators: Fundamental differences between the Taylor Spatial Frame and TrueLok-Hex. J. Med. Eng. Technol. 2015, 39, 173–176. [Google Scholar] [CrossRef] [PubMed]
- Solomin, L.N.; Paley, D.; Shchepkina, E.; Vilensky, V.A.; Skomoroshko, P.V. A comparative study of the correction of femoral deformity between the Ilizarov apparatus and Ortho-SUV frame. Int. Orthop. 2013, 38, 865–872. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gigi, R.; Mor, J.; Lidor, I.; Ovadia, D.; Segev, E. Auto Strut: A novel smart robotic system for external fixation device for bone deformity correction, a preliminary experience. J. Child. Orthop. 2021, 15, 130–136. [Google Scholar] [CrossRef] [PubMed]
- Gough, V.E. Universal tyre test machine. In Proceedings of the FISITA 9th International Automobile Technical Congress, London, UK, 30 April–5 May 1962; pp. 117–137. [Google Scholar]
- Stewart, D. A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Henderson, D.J.; Barron, E.; Hadland, Y.; Sharma, H.K. Functional Outcomes After Tibial Shaft Fractures Treated Using the Taylor Spatial Frame. J. Orthop. Trauma 2015, 29, e54–e59. [Google Scholar] [CrossRef]
- Floerkemeier, T.; Stukenborg-Colsman, C.; Windhagen, H.; Waizy, H. Correction of Severe Foot Deformities Using the Taylor Spatial Frame. Foot Ankle Int. 2011, 32, 176–182. [Google Scholar] [CrossRef]
- Marangoz, S.; Feldman, D.S.; Sala, D.A.; Hyman, J.E.; Vitale, M.G. Femoral Deformity Correction in Children and Young Adults Using Taylor Spatial Frame. Clin. Orthop. Relat. Res. 2008, 466, 3018–3024. [Google Scholar] [CrossRef] [Green Version]
- Sökücü, S.; Demir, B.; Lapçin, O.; Yavuz, U.; Kabukçuoğlu, Y.S. Perioperative versus postoperative measurement of Taylor Spatial Frame mounting parameters. Acta Orthop. Traumatol. Turc. 2014, 48, 491–494. [Google Scholar] [CrossRef]
- Ahrend, M.-D.; Baumgartner, H.; Ihle, C.; Histing, T.; Schröter, S.; Finger, F. Influence of axial limb rotation on radiographic lower limb alignment: A systematic review. Arch. Orthop. Trauma Surg. 2021, 142, 3349–3366. [Google Scholar] [CrossRef]
- Jamali, A.A.; Meehan, J.P.; Moroski, N.M.; Anderson, M.J.; Lamba, R.; Parise, C. Do small changes in rotation affect measurements of lower extremity limb alignment? J. Orthop. Surg. Res. 2017, 12, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arvesen, J.E.; Watson, J.T.; Israel, H. Effectiveness of Treatment for Distal Tibial Nonunions With Associated Complex Deformities Using a Hexapod External Fixator. J. Orthop. Trauma 2017, 31, e43–e48. [Google Scholar] [CrossRef] [PubMed]
- Eren, I.; Eralp, L.; Kocaoglu, M. Comparative clinical study on deformity correction accuracy of different external fixators. Int. Orthop. 2013, 37, 2247–2252. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Naqui, S.Z.H.; Thiryayi, W.; Foster, A.; Tselentakis, G.; Evans, M.; Day, J.B. Correction of Simple and Complex Pediatric Deformities Using the Taylor-Spatial Frame. J. Pediatr. Orthop. 2008, 28, 640–647. [Google Scholar] [CrossRef]
- Manner, H.M.; Huebl, M.; Radler, C.; Ganger, R.; Petje, G.; Grill, F. Accuracy of complex lower-limb deformity correction with external fixation: A comparison of the Taylor Spatial Frame with the Ilizarov ring fixator. J. Child. Orthop. 2007, 1, 55–61. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yushan, M.; Liu, Z.; Liu, J.; Ma, C.; Yusufu, A. Application of elliptic registration and three-dimensional reconstruction in the postoperative measurement of Taylor spatial frame parameters. Injury 2020, 51, 2975–2980. [Google Scholar] [CrossRef]
- Ahrend, M.-D.; Finger, F.; Grünwald, L.; Keller, G.; Baumgartner, H. Improving the accuracy of patient positioning for long-leg radiographs using a Taylor Spatial Frame mounted rotation rod. Arch. Orthop. Trauma. Surg. 2020, 141, 55–61. [Google Scholar] [CrossRef]
- Dagnino, G.; Georgilas, I.; Tarassoli, P.; Atkins, R.; Dogramadzi, S. Vision-based real-time position control of a semi-automated system for robot-assisted joint fracture surgery. Int. J. Comput. Assist. Radiol. Surg. 2015, 11, 437–455. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Wang, T.; Hu, L.; Zhang, L.; Du, H.; Zhao, L.; Wang, L.; Tang, P. A visual servo-based teleoperation robot system for closed diaphyseal fracture reduction. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2015, 229, 629–637. [Google Scholar] [CrossRef]
- Dagnino, G.; Georgilas, I.; Morad, S.; Gibbons, P.; Tarassoli, P.; Atkins, R.; Dogramadzi, S. Intra-operative fiducial-based CT/fluoroscope image registration framework for image-guided robot-assisted joint fracture surgery. Int. J. Comput. Assist. Radiol. Surg. 2017, 12, 1383–1397. [Google Scholar] [CrossRef]
- Simpson, A.L.; Ma, B.; Slagel, B.; Borschneck, D.P.; Ellis, R.E. Computer-assisted distraction osteogenesis by Ilizarov’s method. Int. J. Med. Robot. Comput. Assist. Surg. 2008, 4, 310–320. [Google Scholar] [CrossRef] [PubMed]
- Tang, P.; Hu, L.; Du, H.; Gong, M.; Zhang, L. Novel 3D hexapod computer-assisted orthopaedic surgery system for closed diaphyseal fracture reduction. Int. J. Med. Robot. Comput. Assist. Surg. 2011, 8, 17–24. [Google Scholar] [CrossRef] [PubMed]
- Hu, L.; Zhang, J.; Li, C.; Wang, Y.; Yang, Y.; Tang, P.; Fang, L.; Zhang, L.; Du, H.; Wang, L. A femur fracture reduction method based on anatomy of the contralateral side. Comput. Biol. Med. 2013, 43, 840–846. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Wang, T.; Hu, L.; Zhang, L.; Du, H.; Wang, L.; Luan, S.; Tang, S.L.A.P. Accuracy Analysis of a Robot System for Closed Diaphyseal Fracture Reduction. Int. J. Adv. Robot. Syst. 2014, 11, 169. [Google Scholar] [CrossRef]
- Faschingbauer, M.; Heuer, H.J.D.; Seide, K.; Wendlandt, R.; Münch, M.; Jürgens, C.; Kirchner, R. Accuracy of a hexapod parallel robot kinematics based external fixator. Int. J. Med. Robot. Comput. Assist. Surg. 2015, 11, 424–435. [Google Scholar] [CrossRef]
- Liu, M.; Li, J.; Sun, H.; Guo, X.; Xuan, B.; Ma, L.; Xu, Y.; Ma, T.; Ding, Q.; An, B. Study on the Modeling and Compensation Method of Pose Error Analysis for the Fracture Reduction Robot. Micromachines 2022, 13, 1186. [Google Scholar] [CrossRef]
- Sun, T.; Zhai, Y.; Song, Y.; Zhang, J. Kinematic calibration of a 3-DoF rotational parallel manipulator using laser tracker. Robot. Comput. Manuf. 2016, 41, 78–91. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, J.; Lian, B.; Sun, T. Kinematic calibration of a 5-DoF parallel kinematic machine. Precis. Eng. 2016, 45, 242–261. [Google Scholar] [CrossRef]
- Liang, X.; Lambrichts, I.; Sun, Y.; Denis, K.; Hassan, B.; Li, L.; Pauwels, R.; Jacobs, R. A comparative evaluation of Cone Beam Computed Tomography (CBCT) and Multi-Slice CT (MSCT). Part II: On 3D model accuracy. Eur. J. Radiol. 2010, 75, 270–274. [Google Scholar] [CrossRef]
- Prevrhal, S.; Fox, J.C.; Shepherd, J.A.; Genant, H.K. Accuracy of CT-based thickness measurement of thin structures: Modeling of limited spatial resolution in all three dimensions. Med. Phys. 2002, 30, 1–8. [Google Scholar] [CrossRef]
- Van Eijnatten, M.; van Dijk, R.; Dobbe, J.; Streekstra, G.; Koivisto, J.; Wolff, J. CT image segmentation methods for bone used in medical additive manufacturing. Med. Eng. Phys. 2018, 51, 6–16. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Lian, B.; Li, Q.; Zhang, Y.; Song, Y.; Yang, Y.; Sun, T. An Error Identification and Compensation Method of a 6-DoF Parallel Kinematic Machine. IEEE Access 2020, 8, 119038–119047. [Google Scholar] [CrossRef]
- He, Z.; Song, Y.; Lian, B.; Sun, T. Kinematic Calibration of a 6-DoF Parallel Manipulator with Random and Less Measurements. IEEE Trans. Instrum. Meas. 2022. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, Y.; Li, H.; Fu, X.; Zhang, X.; Liu, S.; Zhang, J.; Zhang, T. Marker- three dimensional measurement versus traditional radiographic measurement in the treatment of tibial fracture using Taylor spatial frame. BMC Musculoskelet. Disord. 2022, 23, 155. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x (mm) | y (mm) | z (mm) | α (°) | β (°) | γ (°) | |
|---|---|---|---|---|---|---|
| Range | −0.32–0.36 | −0.39–0.40 | −0.23–0.33 | −0.10–0.22 | −0.15–0.21 | −0.12–0.09 |
| Mean | 0.062 | −0.036 | 0.028 | 0.019 | 0.024 | −0.015 |
| Standard deviation | 0.227 | 0.274 | 0.185 | 0.102 | 0.107 | 0.064 |
| x (mm) | y (mm) | z (mm) | α (°) | β (°) | γ (°) | |
|---|---|---|---|---|---|---|
| Range (before) | −12.87–9.78 | −13.19–16.80 | 6.18–20.75 | −7.41–6.76 | −8.32–4.54 | −2.43–3.55 |
| Range (after) | −1.04–0.65 | −0.79–1.05 | 0–1.24 | −0.23–0.18 | −0.26–0.24 | −0.21–0.21 |
| Mean (after) | −0.148 | 0.263 | 0.529 | −0.073 | −0.057 | 0.037 |
| S.D. (after) | 0.618 | 0.496 | 0.412 | 0.178 | 0.158 | 0.139 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Song, Y.; Lian, B.; Sun, T. A General Pose Recognition Method and Its Accuracy Analysis for 6-Axis External Fixation Mechanism Using Image Markers. Machines 2022, 10, 1234. https://doi.org/10.3390/machines10121234
Liu S, Song Y, Lian B, Sun T. A General Pose Recognition Method and Its Accuracy Analysis for 6-Axis External Fixation Mechanism Using Image Markers. Machines. 2022; 10(12):1234. https://doi.org/10.3390/machines10121234
Chicago/Turabian StyleLiu, Sida, Yimin Song, Binbin Lian, and Tao Sun. 2022. "A General Pose Recognition Method and Its Accuracy Analysis for 6-Axis External Fixation Mechanism Using Image Markers" Machines 10, no. 12: 1234. https://doi.org/10.3390/machines10121234
APA StyleLiu, S., Song, Y., Lian, B., & Sun, T. (2022). A General Pose Recognition Method and Its Accuracy Analysis for 6-Axis External Fixation Mechanism Using Image Markers. Machines, 10(12), 1234. https://doi.org/10.3390/machines10121234