
A Calculation Method for Tooth Wear Depth Based on the Finite Element Method That Considers the Dynamic Mesh Force


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Gear Parameters
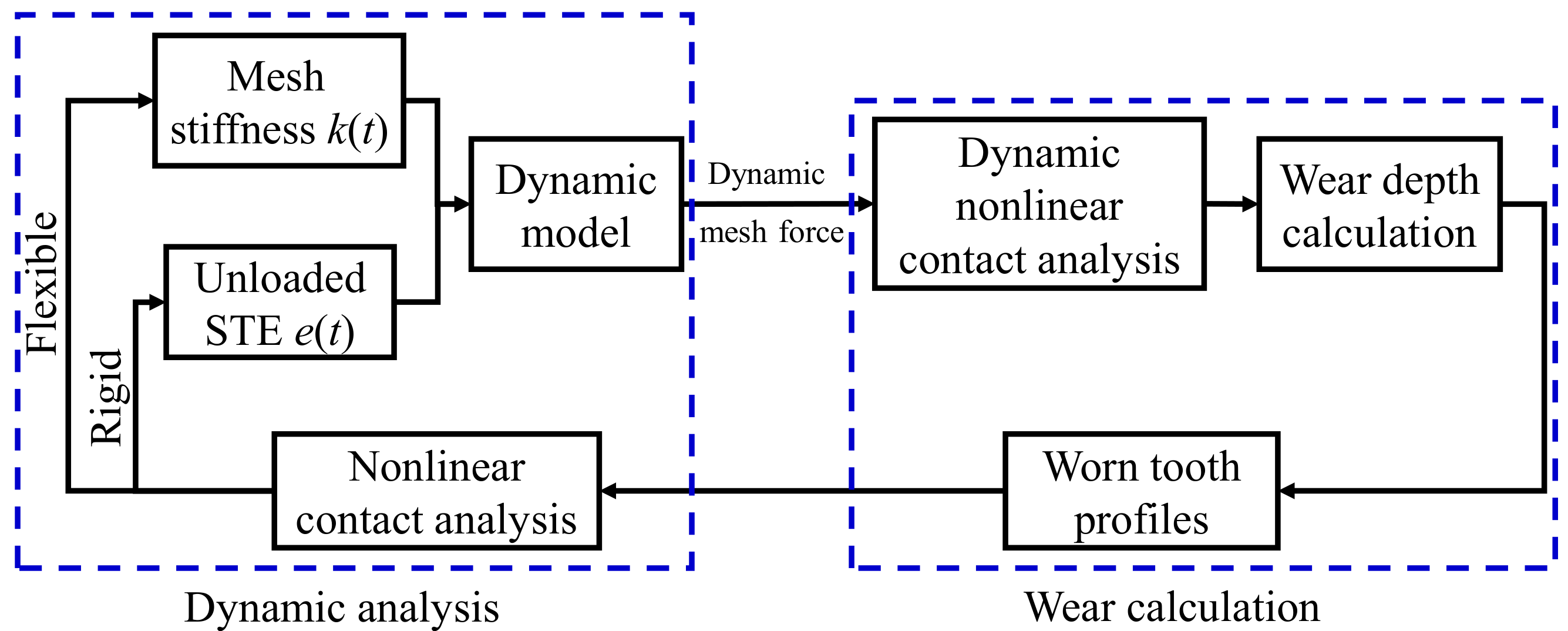
2.2. Methods
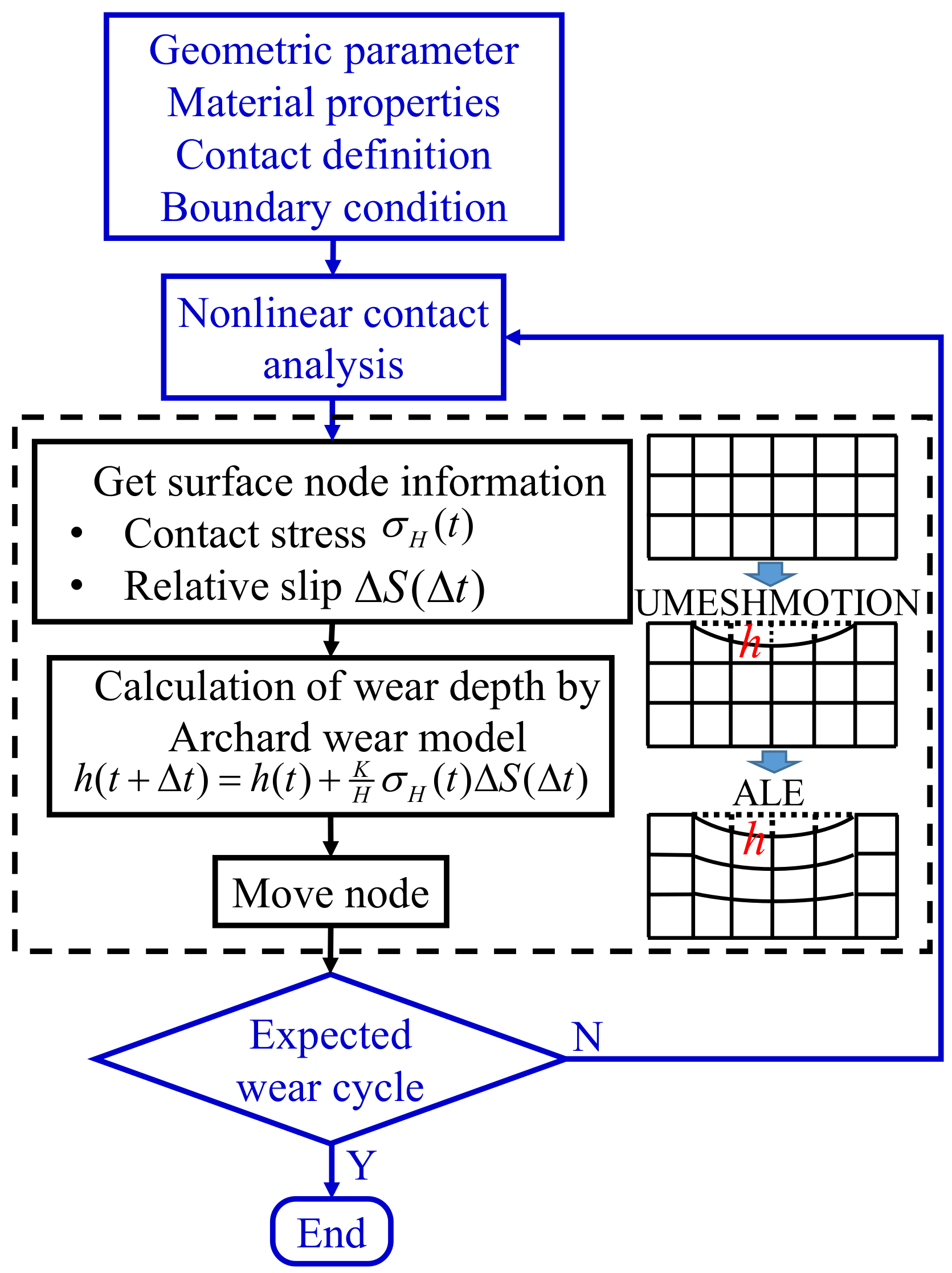
2.2.1. Archard’s Wear Model
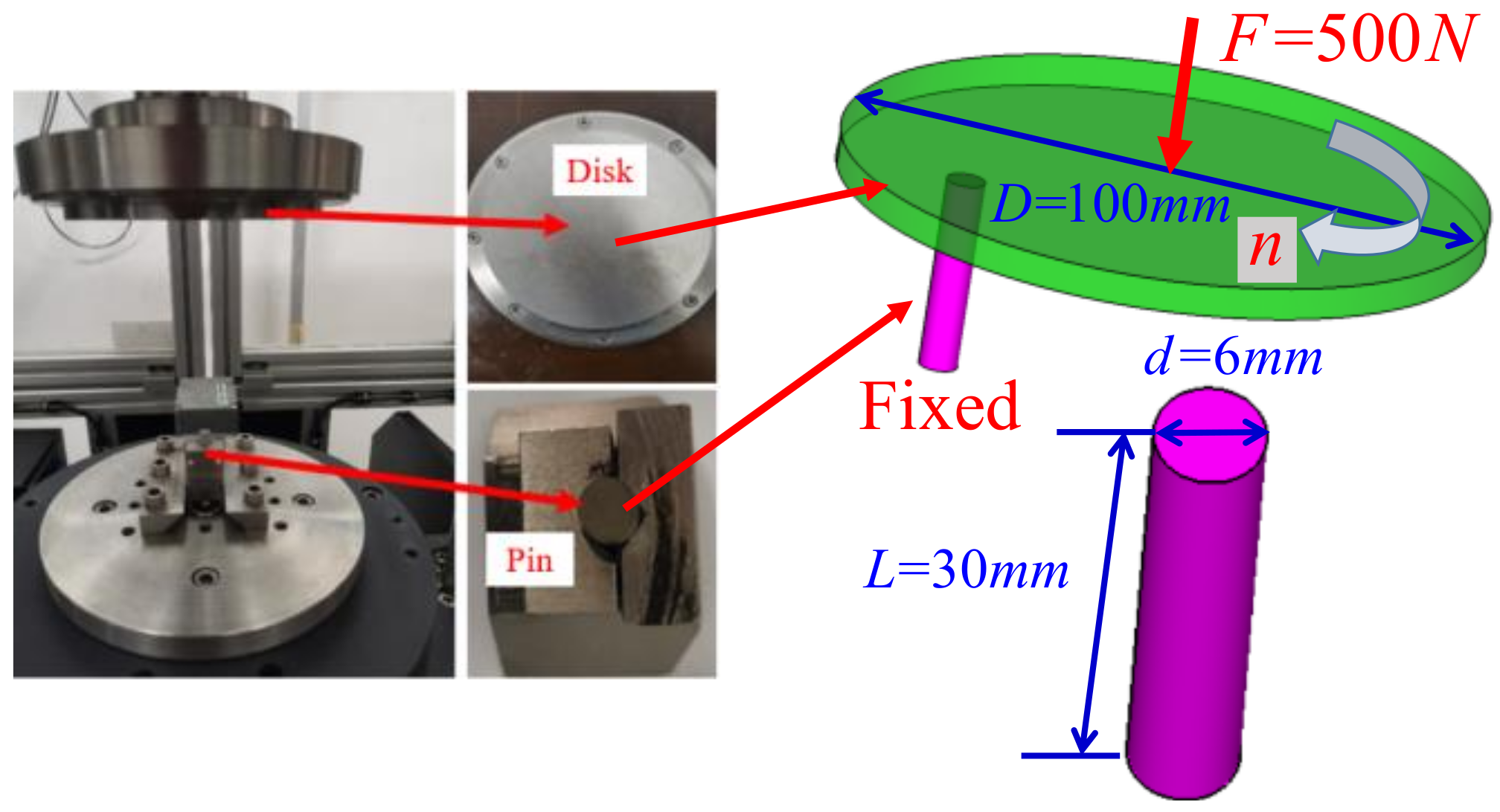
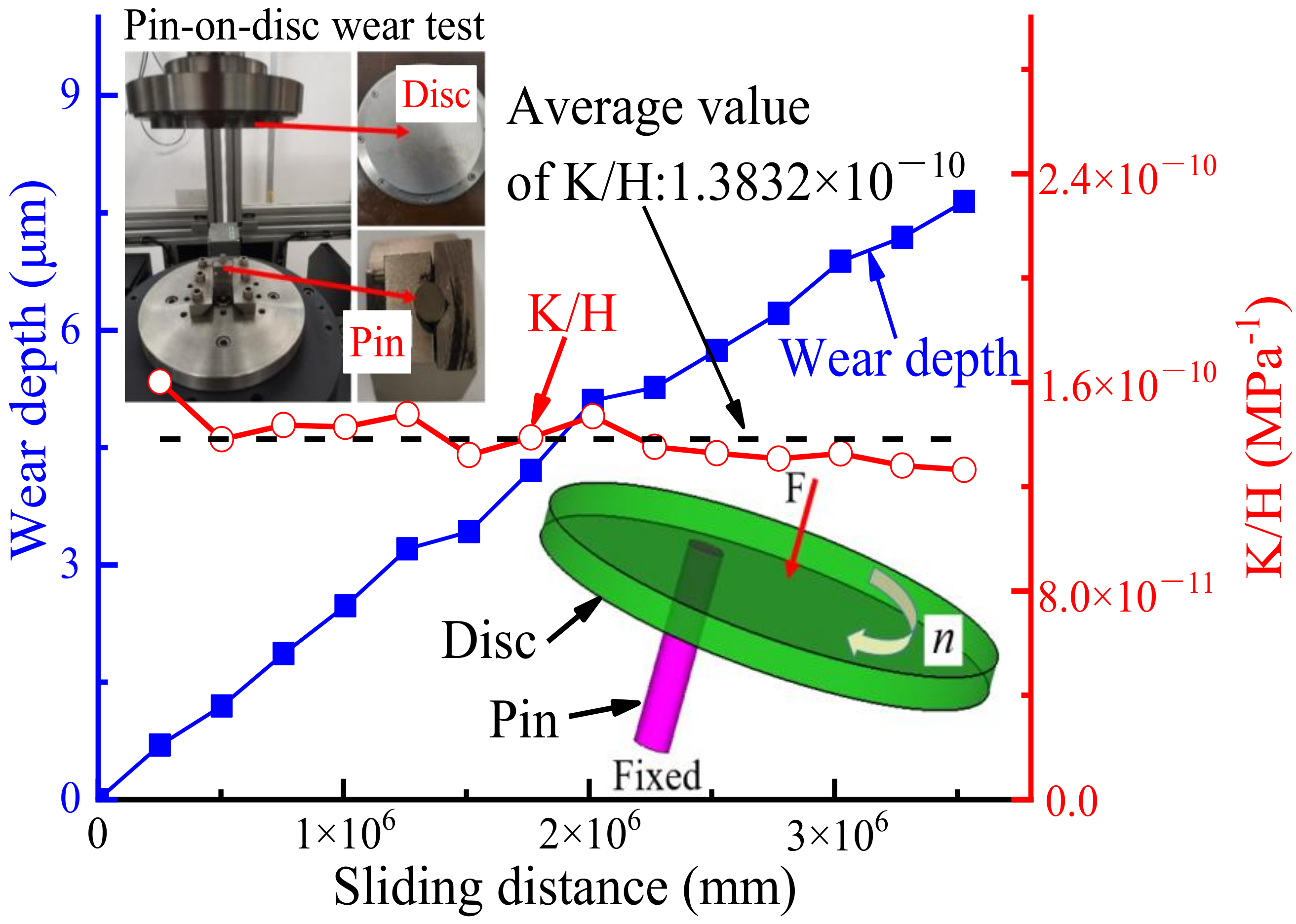
2.2.2. Pin-On-Disc Wear Test and Wear Coefficient Calculation
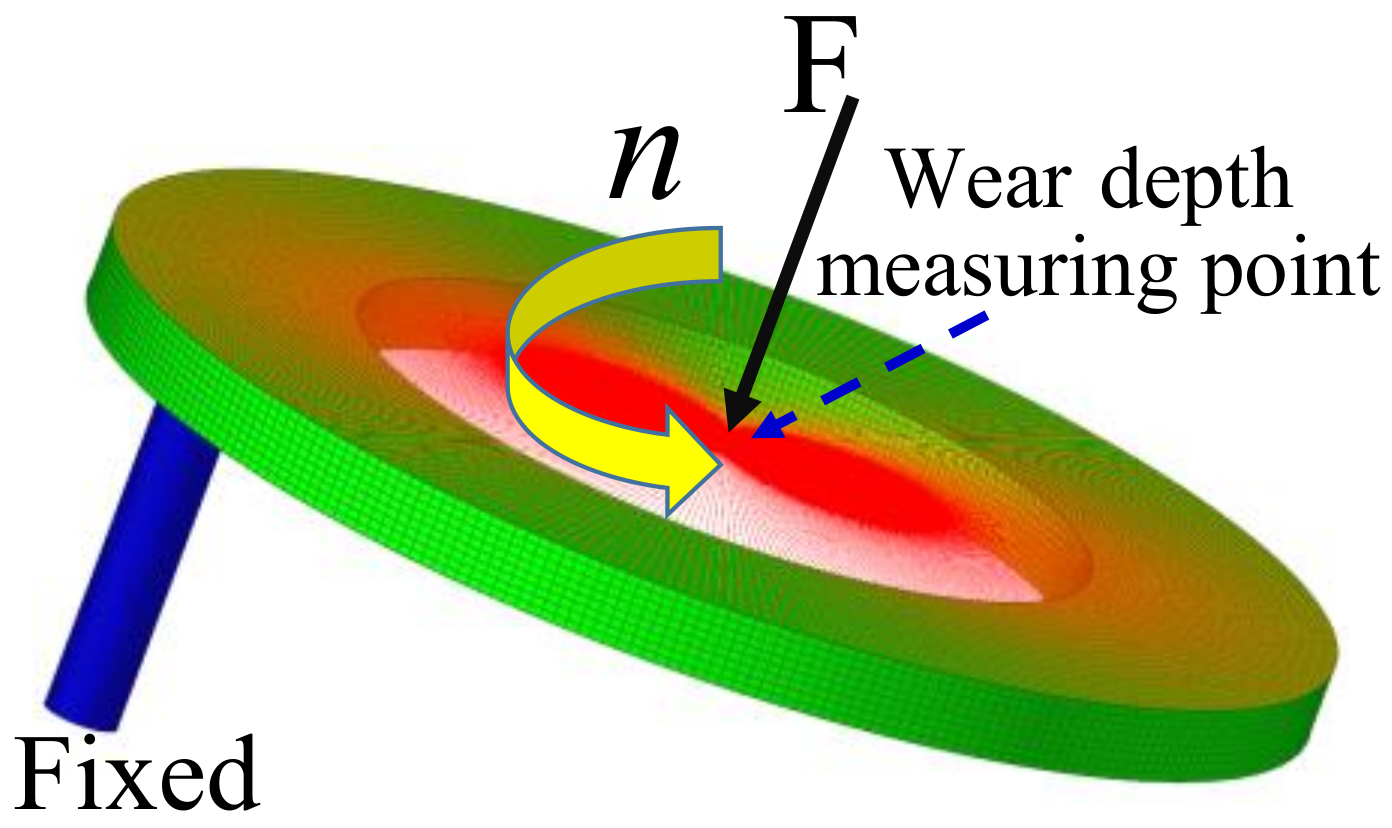
2.2.3. Wear Calculation Method Based on the FEM and Simulation of Pin-On-Disc Wear Test
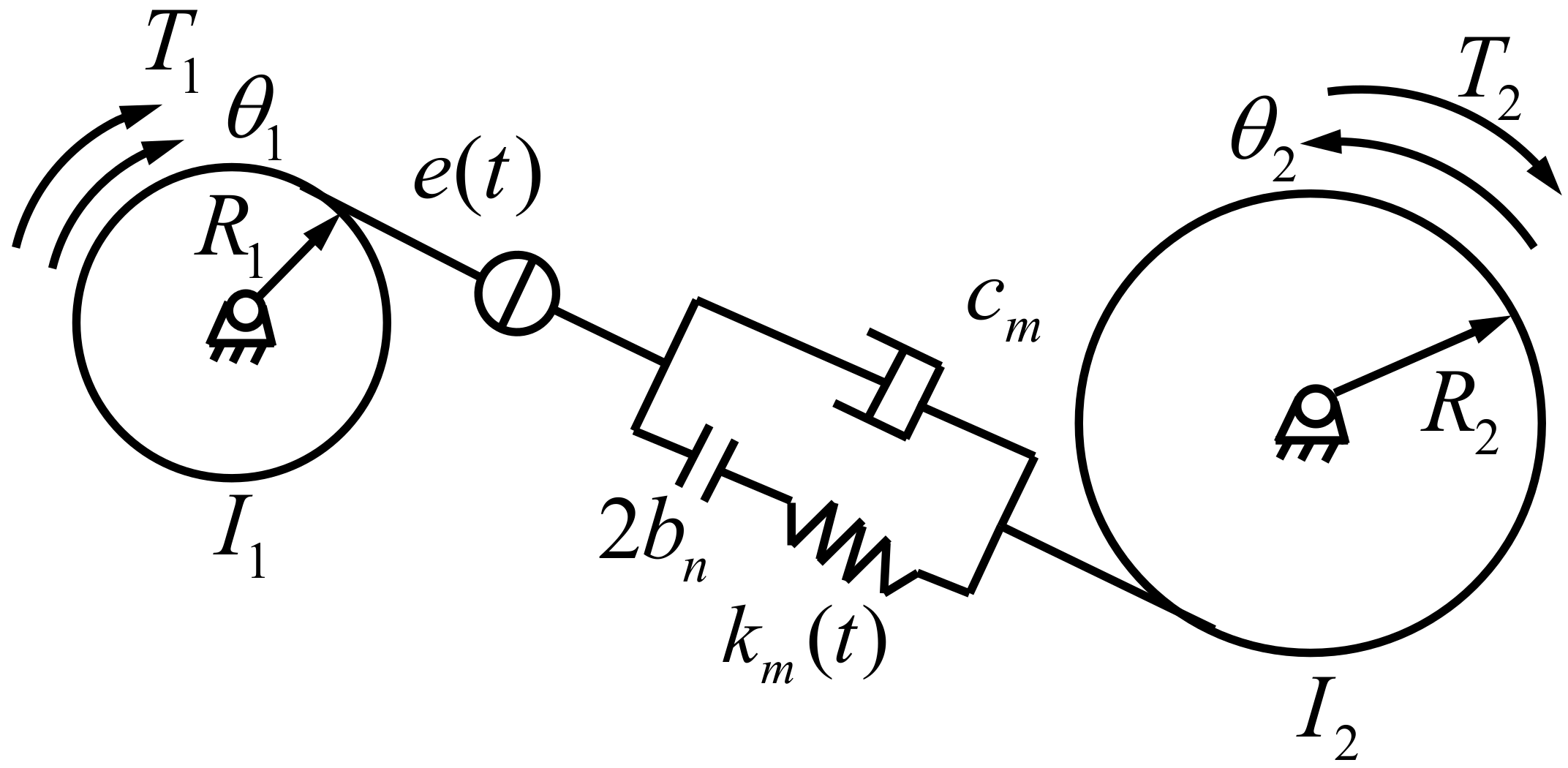
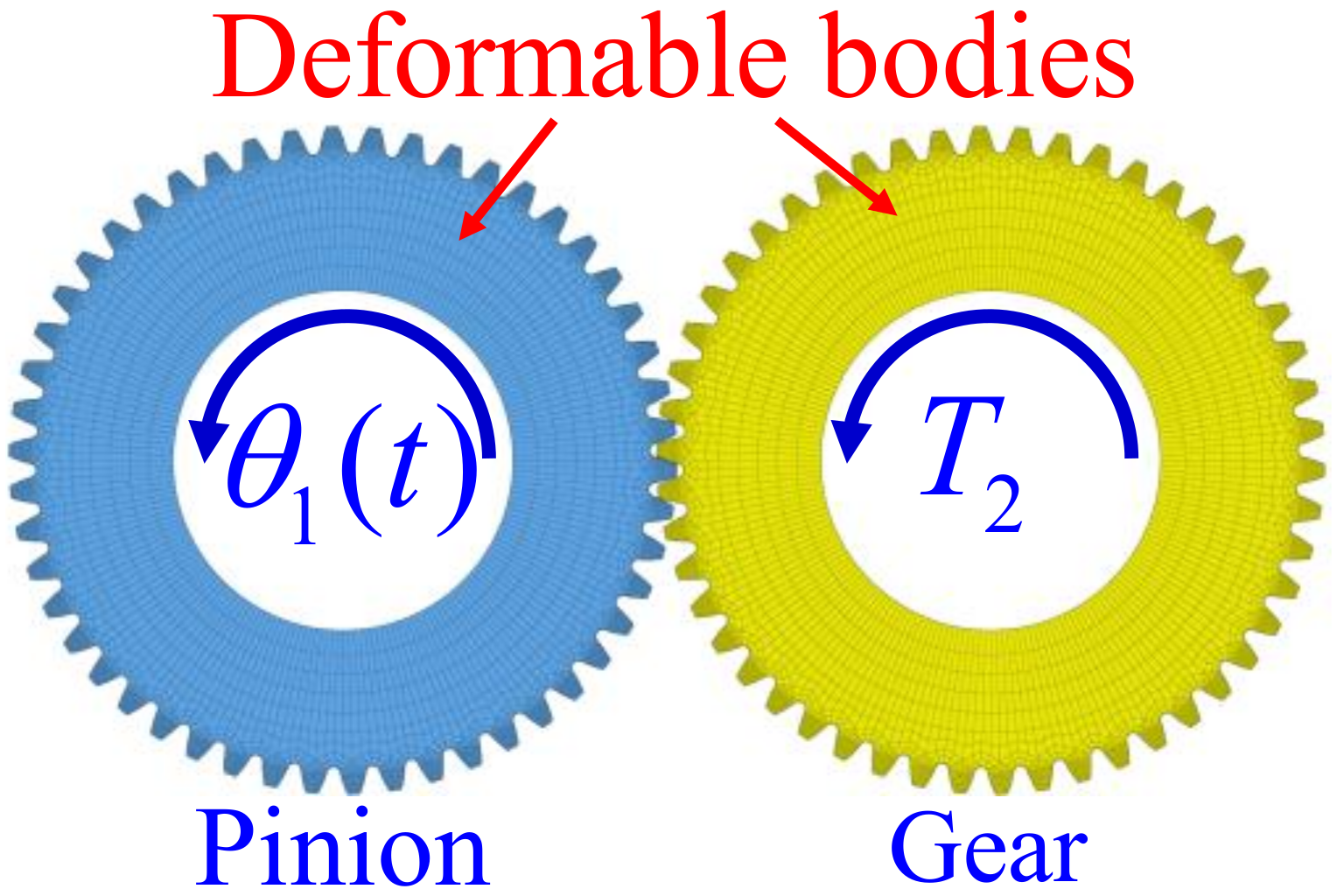
2.2.4. Dynamic Model and Dynamic Mesh Force Calculation
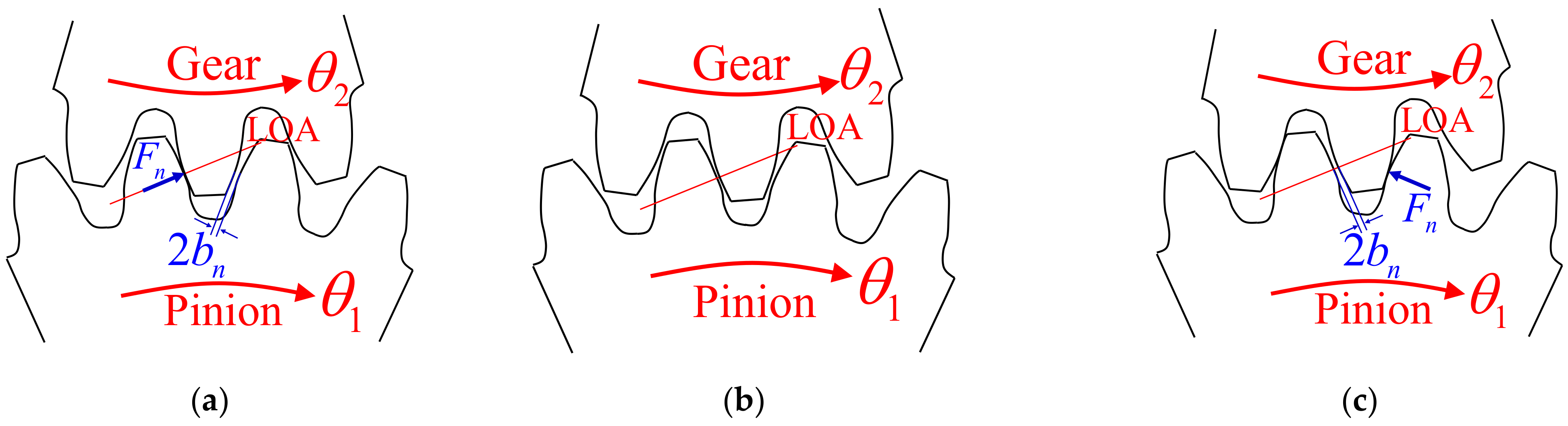
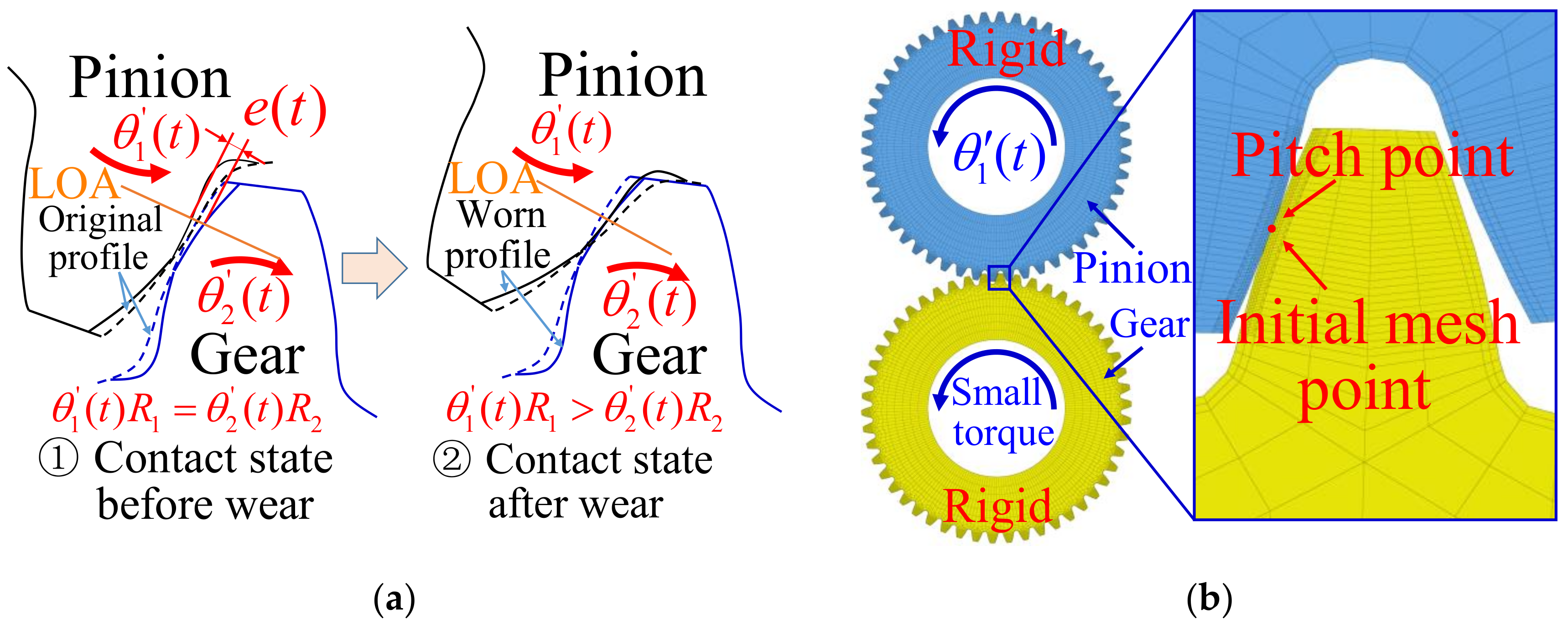
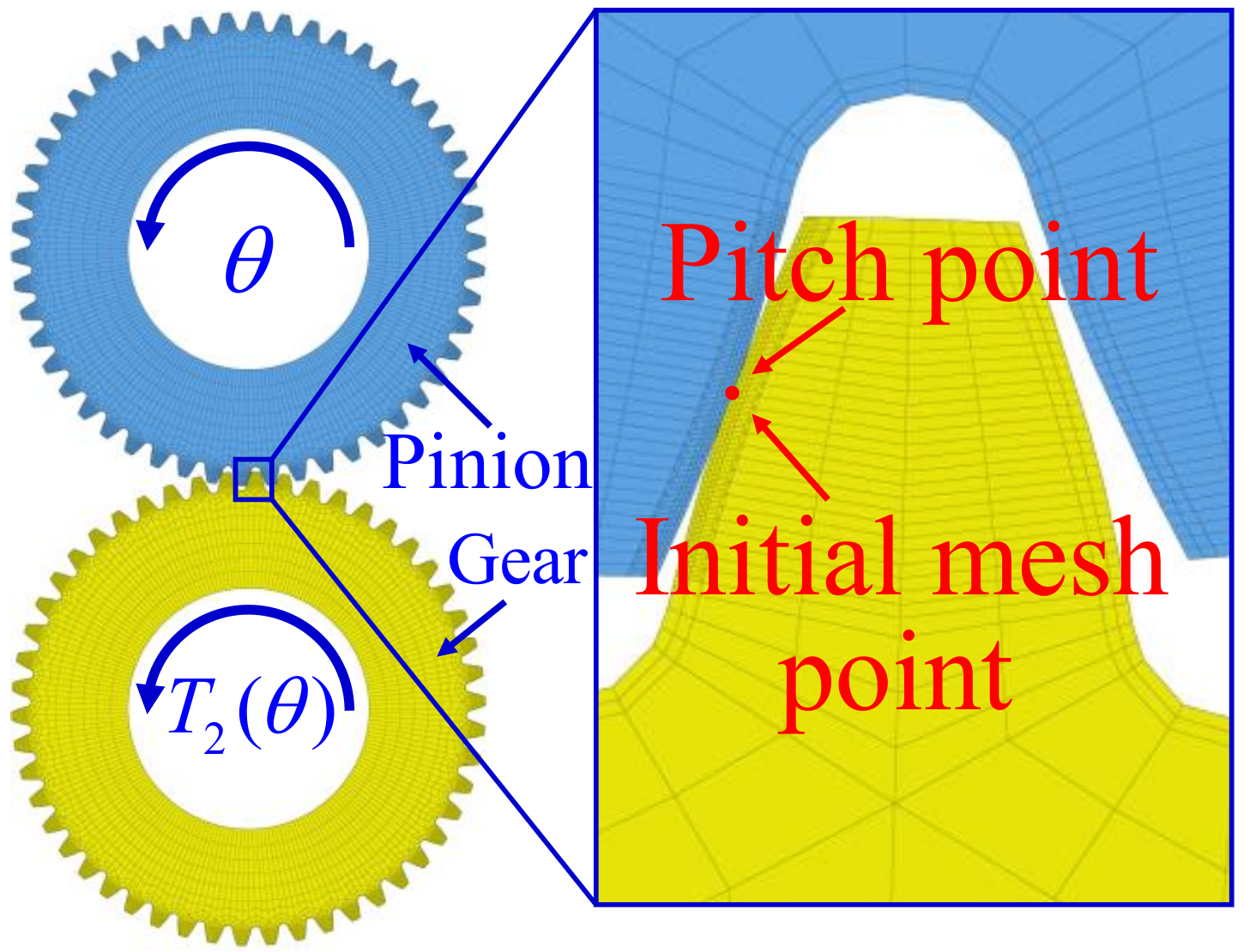
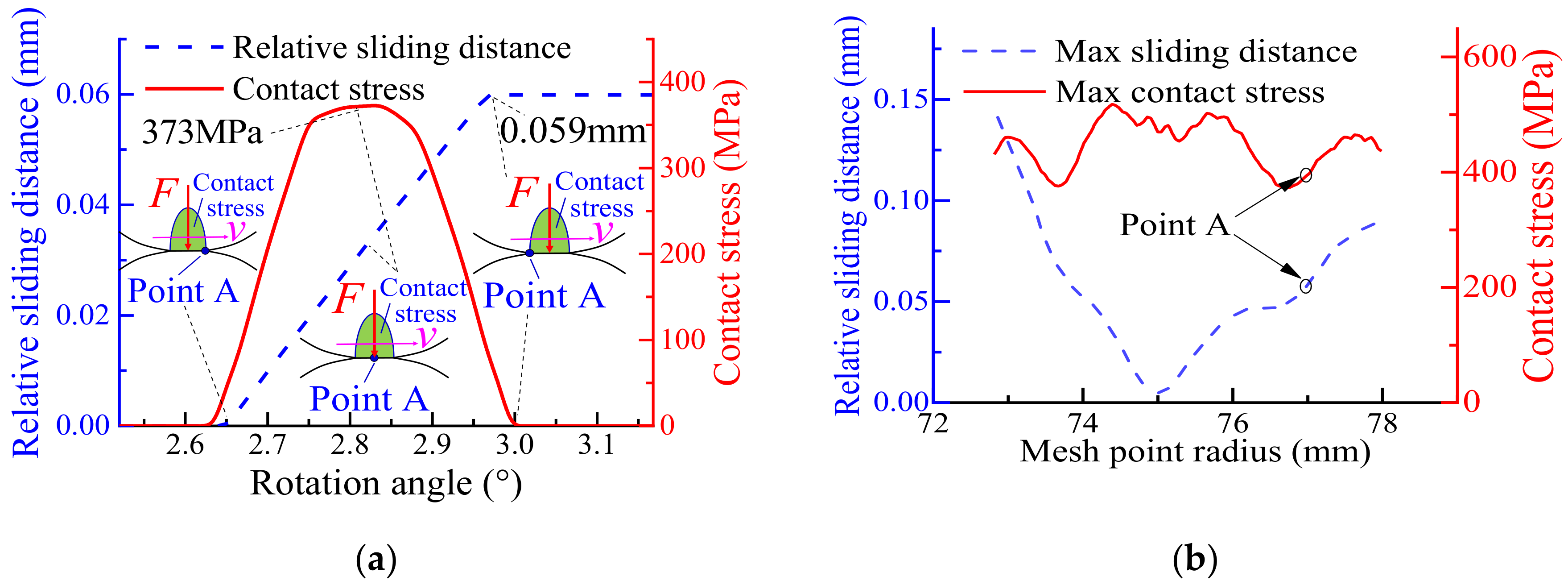
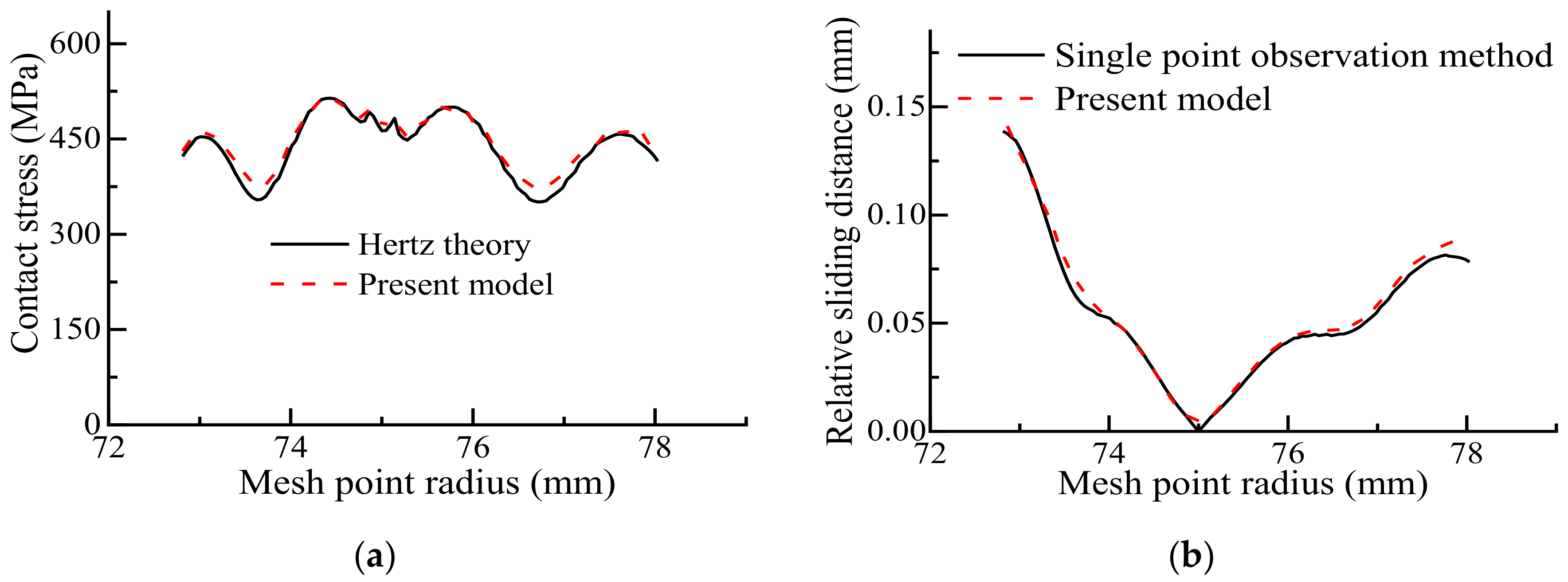
2.2.5. Dynamic Contact Analysis Model and Theoretical Calculation Method
- 1.
- Dynamic contact analysis model based on FEM;
- 2.
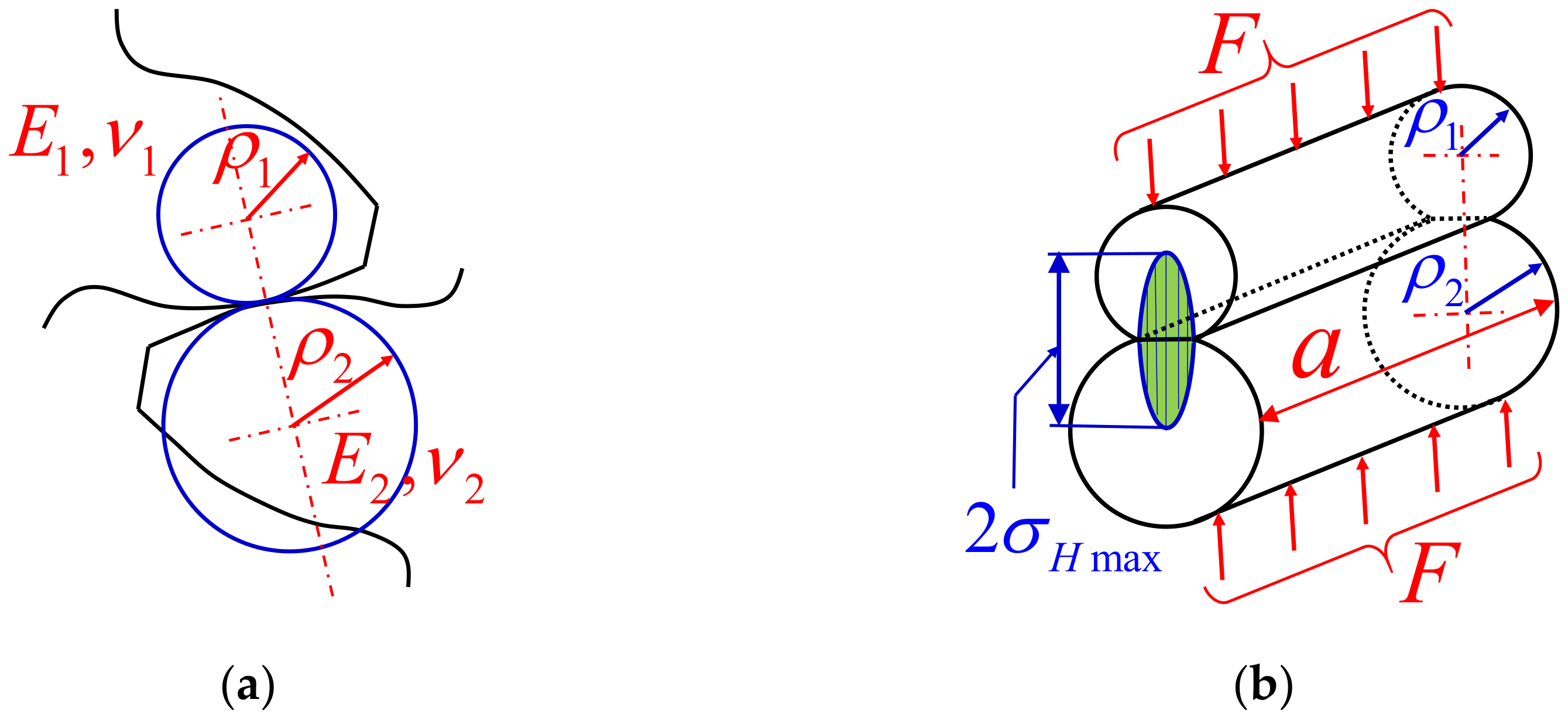
- Max contact stress calculation based on Hertz theory
- 3.
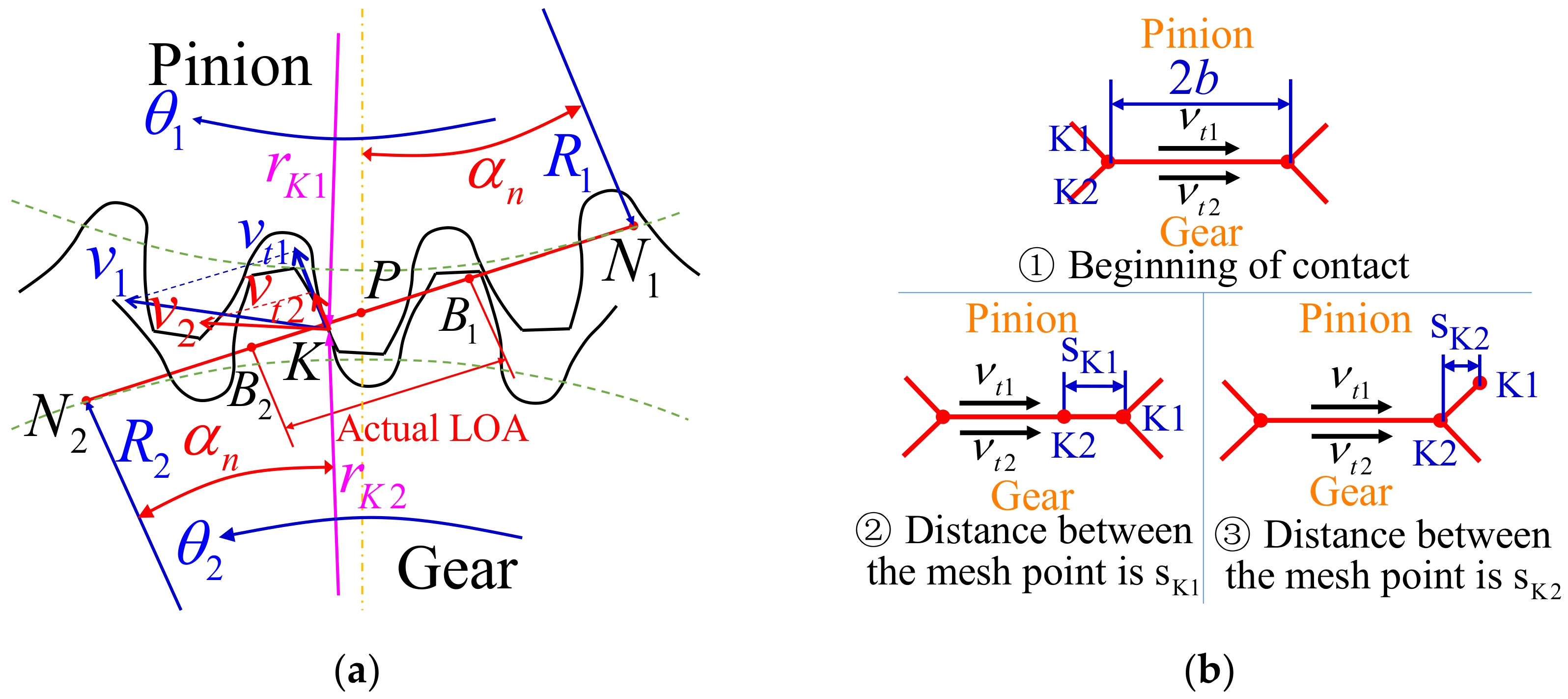
- Max relative sliding distance calculation based on single point observation method
2.2.6. Wear Calculation Method for the Gear Surface
3. Results and Discussion
3.1. Pin-On-Disc Wear Test and Wear Coefficient Calculation Result
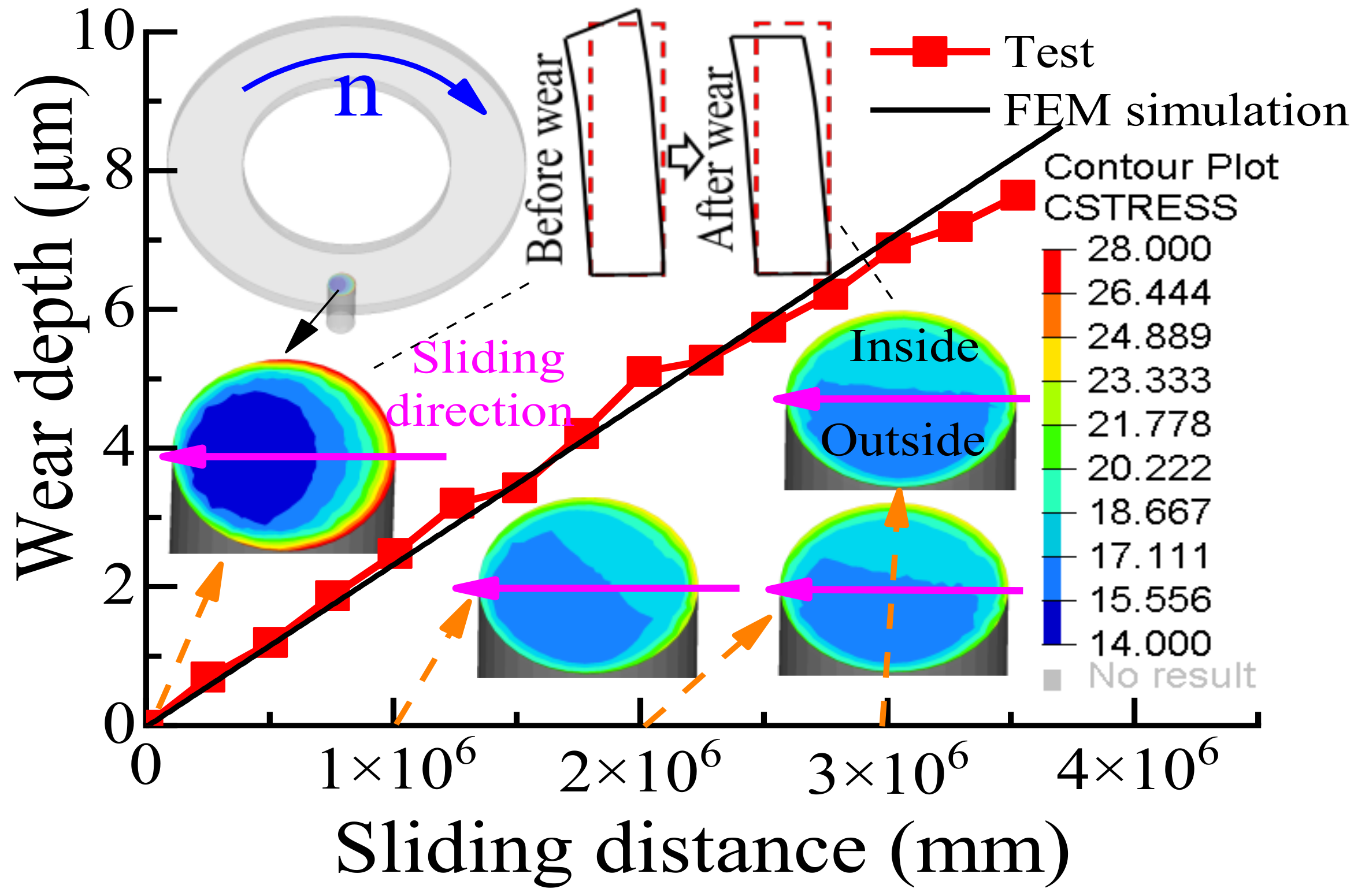
3.2. Simulation Result of Pin-On-Disc Wear Test
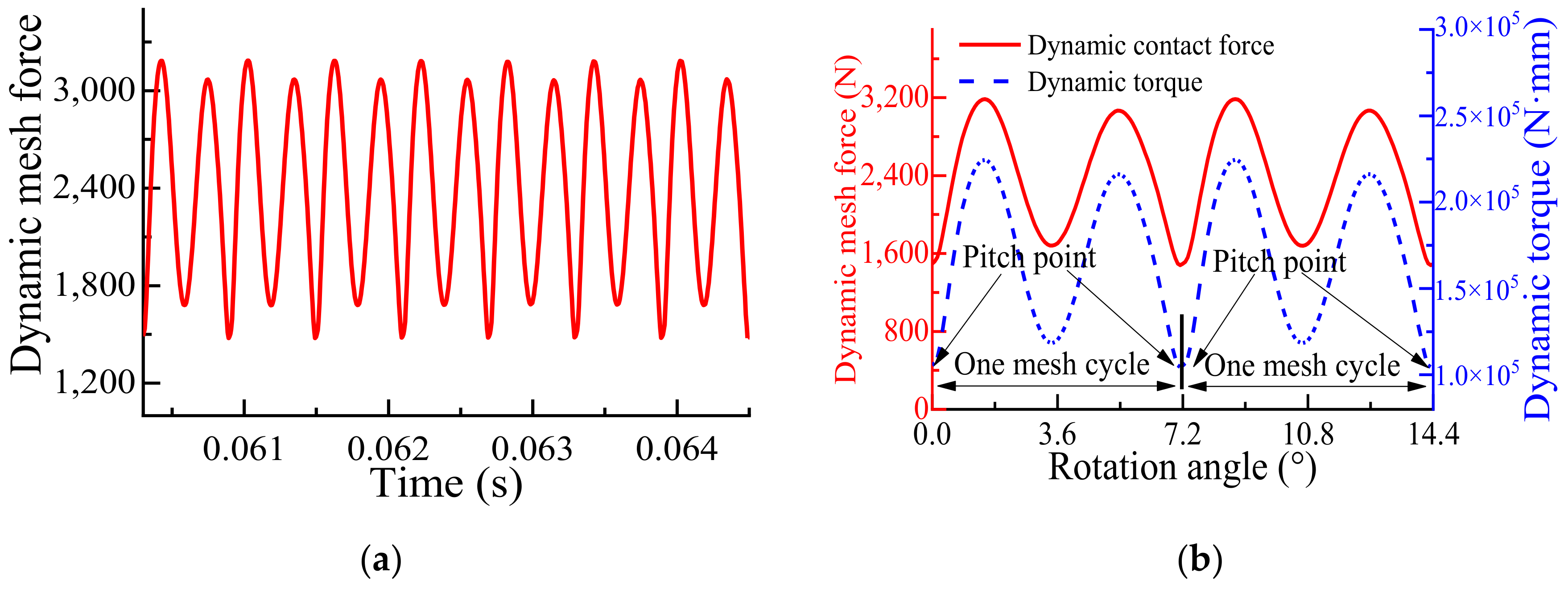
3.3. Dynamic Analysis Result
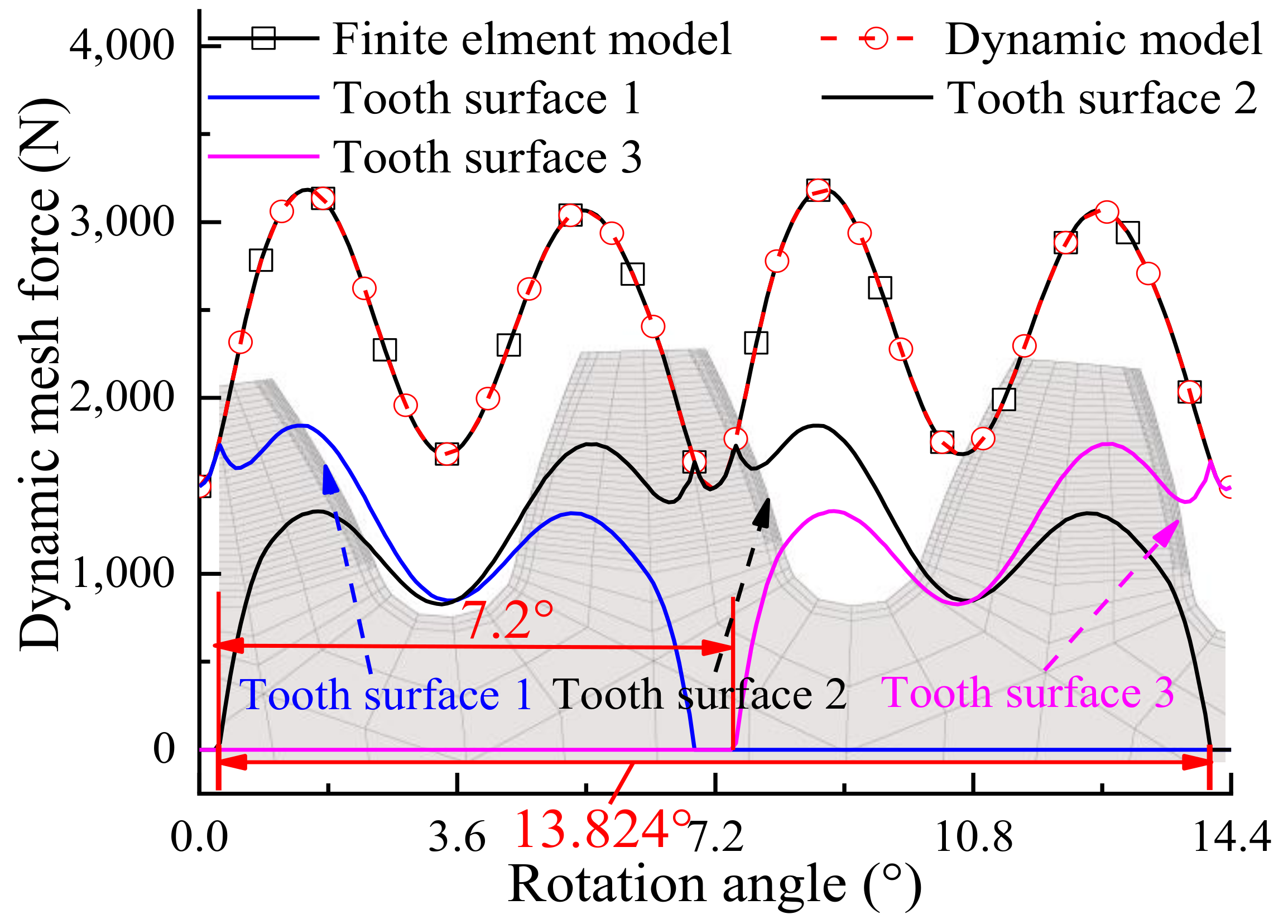
3.4. Dynamic Contact Analysis Result
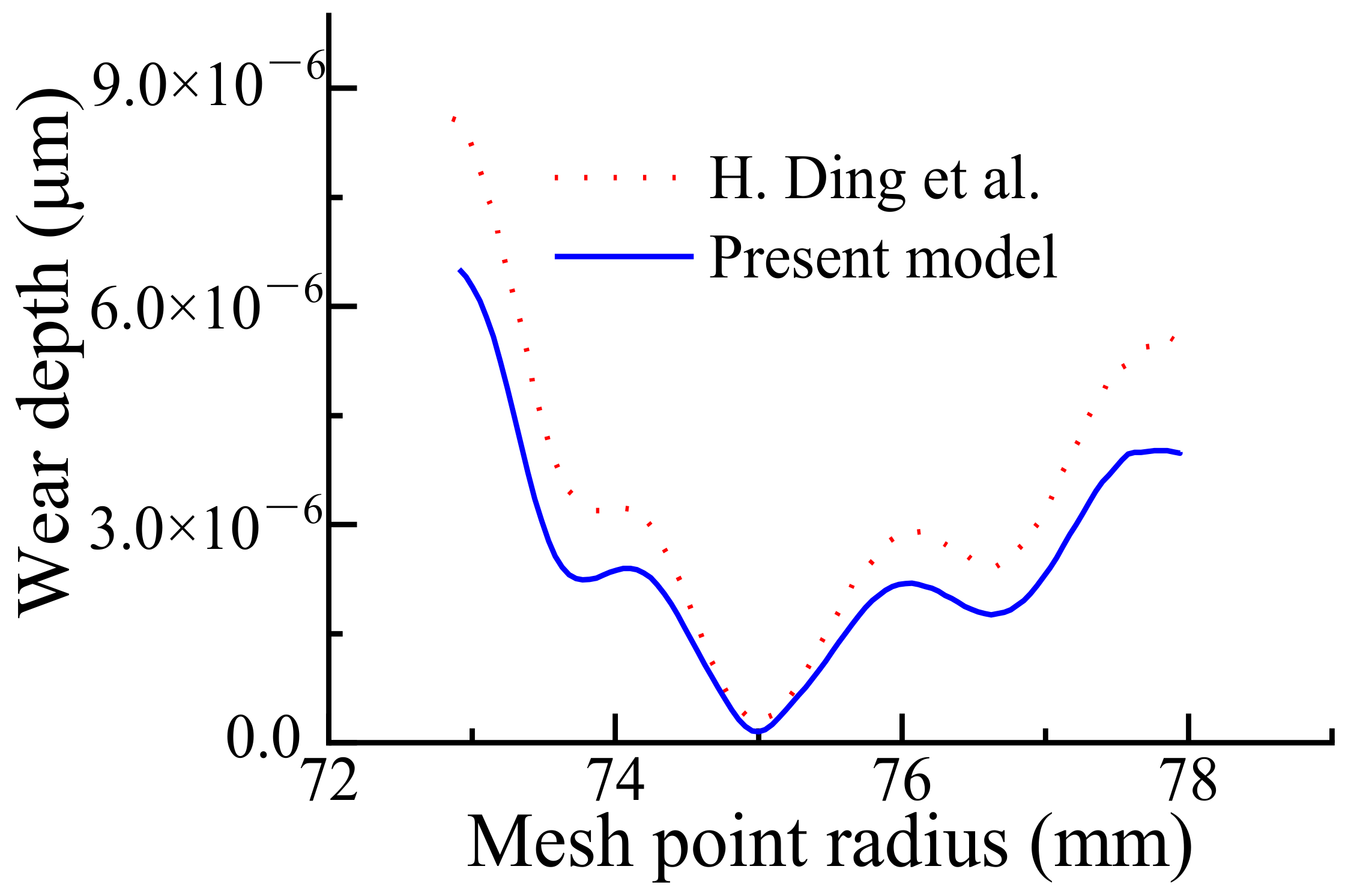
3.5. Wear Depth Calculation Results
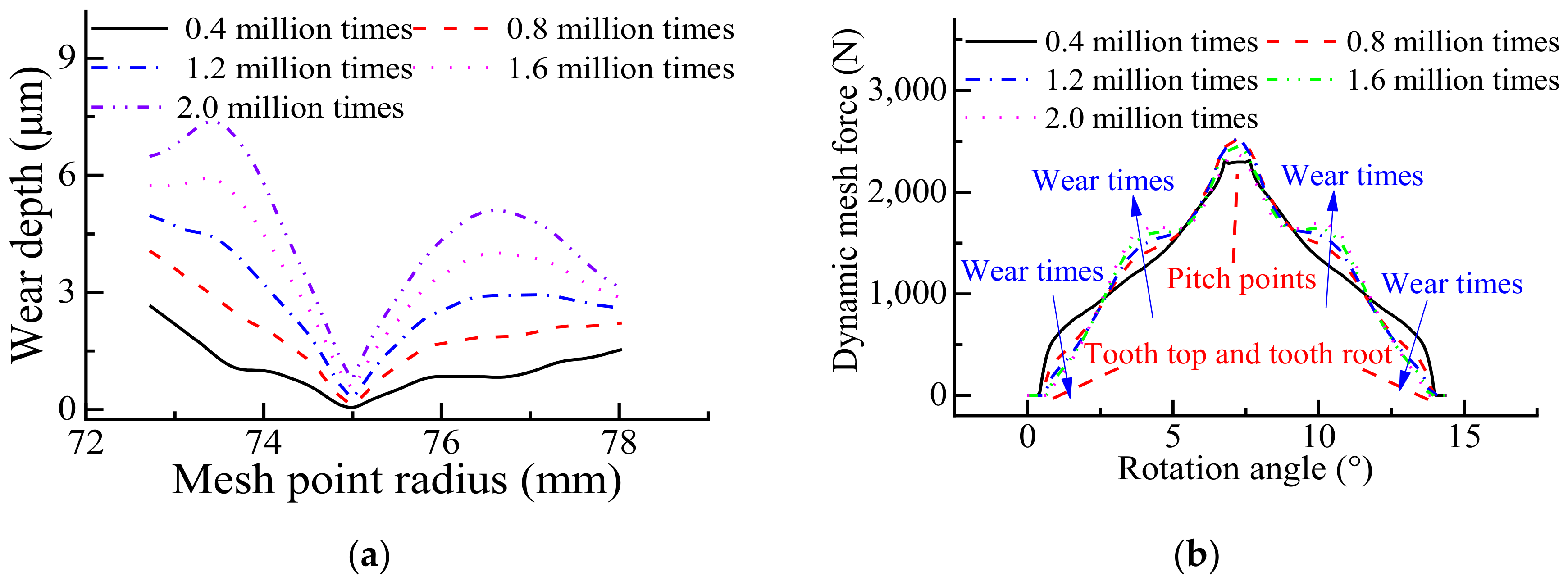
3.5.1. Tooth Surface Wear Depths for Different Wear Times
- wear depth in one mesh process;
- wear depth with different wear times;
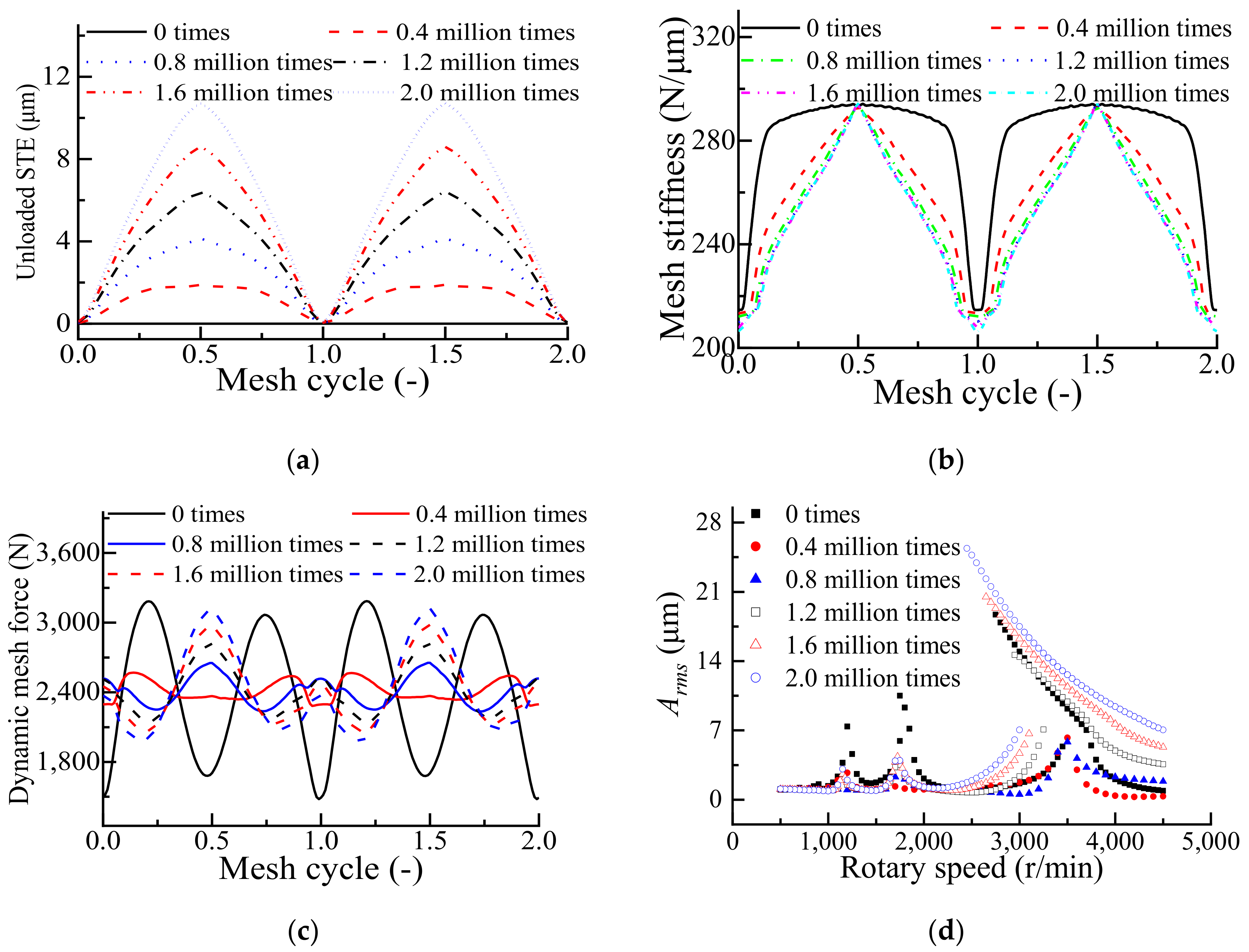
3.5.2. Wear Times Effect on the Dynamic Characteristics
- Wear depth calculation results
4. Conclusions
- To verify the feasibility of the wear depth calculation method and the wear coefficient calculation method, the pin-on-disc wear test and simulation calculation are carried out on steel 20CrMoH as an example. The calculation results are consistent with the test results, indicating the feasibility of the wear depth calculation method and the wear coefficient calculation method.
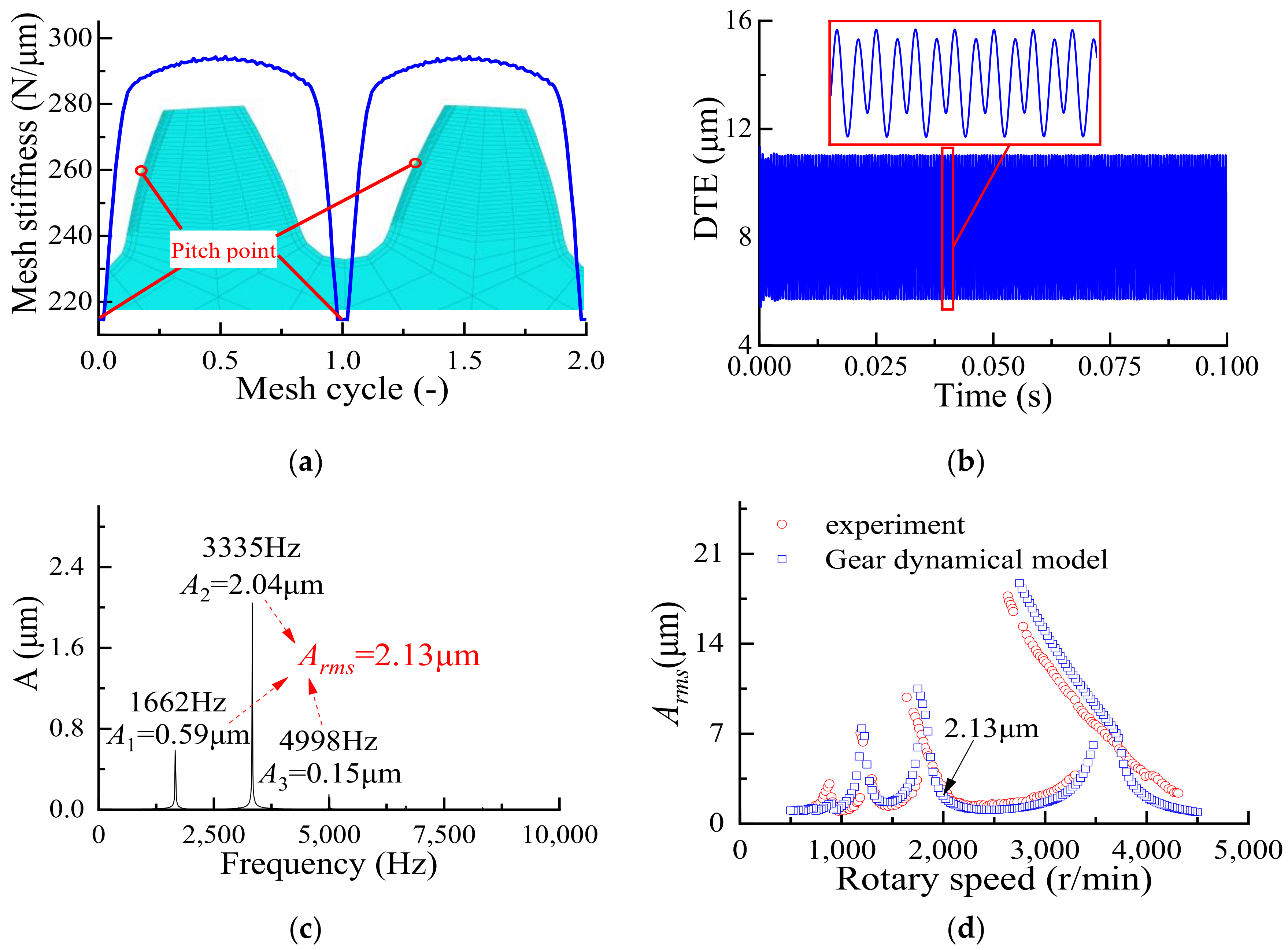
- To verify the correctness of the dynamic model and dynamic contact analysis model, the pair of spur gears in [38] are taken as an example to calculate the equivalent root-mean-square amplitude of the DTE based on the dynamic model and compared with the experimental results to prove the accuracy of the dynamic model. The maximum contact stress and relative sliding distance are calculated by the dynamic contact analysis model and compared to the Hertz theory calculation results, proving the accuracy of the dynamic contact stress model of the tooth surface.
- To analyze the influence of the time-varying characteristics of the tooth contact stress and relative sliding distance on the tooth wear depth, maximum contact stress and maximum relative sliding distance calculation, the time-varying contact stress and time-varying sliding distance are used to calculate the tooth wear depth. The results show that the wear depth calculated without considering the time-varying characteristics is larger than that with the time-varying characteristics.
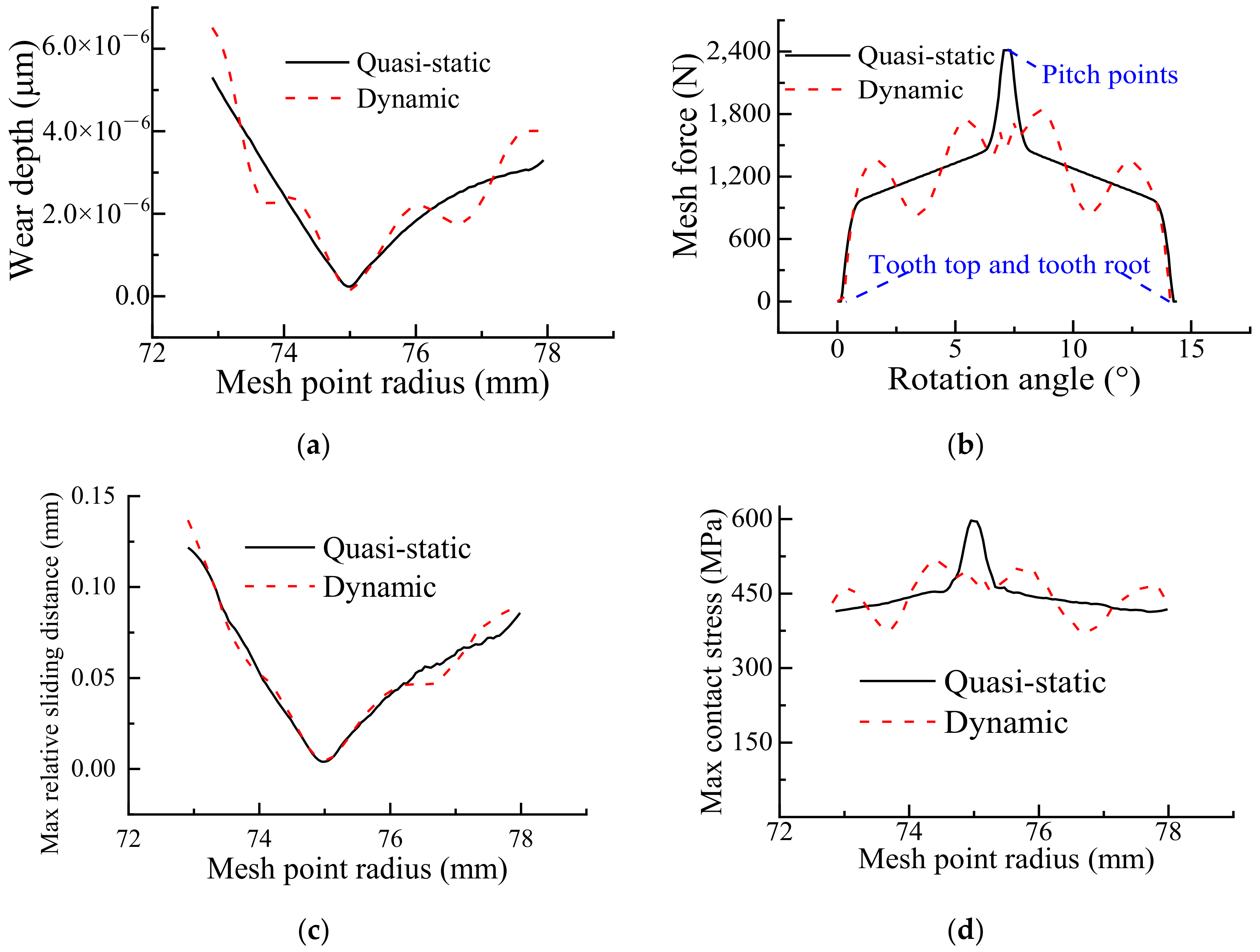
- To analyze the influence of the dynamic mesh force on the tooth surface wear depth, the tooth surface wear depth is calculated and compared by using the quasi-static contact model and dynamic contact model. The results show that there is a strong relationship between the tooth surface wear depth and dynamic mesh force.
- To study the wear depth at different wear times and the influence of different wear times on the dynamic characteristics of the gears, the wear depth, unloaded STE, mesh stiffness, dynamic mesh force and equivalent root-mean-square amplitude of the DTE under different speeds for different wear times are displayed. The results show that a small amount of wear may reduce the vibration of the gear, and excessive wear aggravates the vibration of the gear. These results also show that the wear depth increases with increasing wear time. When the wear time of the involute spur gear is shorter, the tooth interference may be reduced to reduce the gear vibration. When the wear time is too long, the unloaded STE caused by wear becomes larger, and the vibration of the gear becomes larger.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Wei, J.; Sun, W. Parameter Sensitivity Analysis of Gear Contact in Gear-Bearing-Rotor System Based on Romax. Appl. Mech. Mater. 2014, 472, 91–99. [Google Scholar] [CrossRef]
- Hsieh, L.-C.; Chen, T.-H. The engineering design and transmission efficiency verification of helical spur gear transmission with a single gear pair. Trans. Can. Soc. Mech. Eng. 2016, 40, 981–993. [Google Scholar] [CrossRef]
- Xu, X.; Liu, G.; Liang, X. Research on the Electromagnetic Conversion Method of Stator Current for Local Fault Detection of a Planetary Gearbox. Machines 2021, 9, 277. [Google Scholar] [CrossRef]
- Ding, H.; Kahraman, A. Interactions between nonlinear spur gear dynamics and surface wear. J. Sound Vib. 2007, 307, 662–679. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Feng, Z. Dynamic modeling of gearbox faults: A review. Mech. Syst. Signal Processing 2018, 98, 852–876. [Google Scholar] [CrossRef]
- Sari, M.R.; Haiahem, A.; Flamand, L. Effect of lubricant contamination on gear wear. Tribol. Lett. 2007, 27, 119–126. [Google Scholar] [CrossRef]
- Brethee, K.F.; Zhen, D.; Gu, F.; Ball, A.D. Helical gear wear monitoring: Modelling and experimental validation. Mech. Mach. Theory 2017, 117, 210–229. [Google Scholar] [CrossRef]
- Feng, K.; Smith, W.A.; Peng, Z. Use of an improved vibration-based updating methodology for gear wear prediction. Eng. Fail. Anal. 2021, 120, 105066. [Google Scholar] [CrossRef]
- Flodin, A.; Andersson, S. Simulation of mild wear in spur gears. Wear 1997, 207, 16–23. [Google Scholar] [CrossRef]
- Flodin, A.; Andersson, S. Simulation of mild wear in helical gears. Wear 2000, 241, 123–128. [Google Scholar] [CrossRef]
- Flodin, A.; Andersson, S. A simplified model for wear prediction in helical gears. Wear 2001, 249, 285–292. [Google Scholar] [CrossRef]
- Huangfu, Y.; Chen, K.; Ma, H.; Li, X.; Yu, X.; Zhao, B.; Wen, B. Investigation on meshing and dynamic characteristics of spur gears with tip relief under wear fault. Sci. China Technol. Sci. 2019, 62, 1948–1960. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Yang, Z.; Chen, X. Fault mechanism and dynamic modeling of planetary gear with gear wear. Mech. Mach. Theory 2021, 155, 104098. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, C.; Wang, H.; Hu, B.; Liu, Z. A novel contact model for rough surfaces using piecewise linear interpolation and its application in gear wear. Wear 2021, 476, 203685. [Google Scholar] [CrossRef]
- Archard, J. Contact and rubbing of flat surfaces. J. Appl. Phys. 1953, 24, 981–988. [Google Scholar] [CrossRef]
- Park, D.; Kolivand, M.; Kahraman, A. Prediction of surface wear of hypoid gears using a semi-analytical contact model. Mech. Mach. Theory 2012, 52, 180–194. [Google Scholar] [CrossRef]
- Tunalioğlu, M.Ş.; Tuc, B. Theoretical and experimental investigation of wear in internal gears. Wear 2014, 309, 208–215. [Google Scholar] [CrossRef]
- Bajpai, P.; Kahraman, A.; Anderson, N. A surface wear prediction model for parallel-axis gear pairs. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 2–6 September 2003; pp. 817–826. [Google Scholar]
- Hegadekatte, V.; Huber, N.; Kraft, O. Finite element based simulation of dry sliding wear. Model. Simul. Mater. Sci. Eng. 2004, 13, 57. [Google Scholar] [CrossRef]
- Park, D.; Kahraman, A. A surface wear model for hypoid gear pairs. Wear 2009, 267, 1595–1604. [Google Scholar] [CrossRef]
- Hegadekatte, V.; Hilgert, J.; Kraft, O.; Huber, N. Multi time scale simulations for wear prediction in micro-gears. Wear 2010, 268, 316–324. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Liu, X. Effects of misalignment on surface wear of spur gears. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2015, 229, 1145–1158. [Google Scholar] [CrossRef]
- Hertz, H. On the contact of elastic solids. J. Reine Angew. Math. 1881, 92, 156–171. [Google Scholar] [CrossRef]
- Andersson, S. Partial EHD Theory and Initial Wear of Gears; Royal Institute of Technology: Stockholm, Sweden, 1975. [Google Scholar]
- Lundvall, O.; Klarbring, A. Simulation of wear by use of a nonsmooth Newton method—A spur gear application. Mech. Struct. Mach. 2001, 29, 223–238. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Chen, X. Evaluating the influence of tooth surface wear on TVMS of planetary gear set. Mech. Mach. Theory 2019, 136, 206–223. [Google Scholar] [CrossRef]
- Karpat, F.; Ekwaro-Osire, S. Influence of tip relief modification on the wear of spur gears with asymmetric teeth. Tribol. Trans. 2008, 51, 581–588. [Google Scholar] [CrossRef]
- Park, D.; Kolivand, M.; Kahraman, A. An approximate method to predict surface wear of hypoid gears using surface interpolation. Mech. Mach. Theory 2014, 71, 64–78. [Google Scholar] [CrossRef]
- Huang, D.; Wang, Z.; Kubo, A. Hypoid gear integrated wear model and experimental verification design and test. Int. J. Mech. Sci. 2020, 166, 105228. [Google Scholar] [CrossRef]
- Zhou, C.; Wang, H. An adhesive wear prediction method for double helical gears based on enhanced coordinate transformation and generalized sliding distance model. Mech. Mach. Theory 2018, 128, 58–83. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, Y. Mesh stiffness calculation of a spur gear pair with tooth profile modification and tooth root crack. Mech. Mach. Theory 2013, 62, 63–74. [Google Scholar] [CrossRef]
- Eymard, R.; Gallouët, T. H-convergence and numerical schemes for elliptic problems. SIAM J. Numer. Anal. 2003, 41, 539–562. [Google Scholar] [CrossRef] [Green Version]
- Mudunuru, M.K.; Nakshatrala, K. On enforcing maximum principles and achieving element-wise species balance for advection–diffusion–reaction equations under the finite element method. J. Comput. Phys. 2016, 305, 448–493. [Google Scholar] [CrossRef] [Green Version]
- Lin, A.-D.; Kuang, J.-H. Dynamic interaction between contact loads and tooth wear of engaged plastic gear pairs. Int. J. Mech. Sci. 2008, 50, 205–213. [Google Scholar] [CrossRef]
- Osman, T.; Velex, P. Static and dynamic simulations of mild abrasive wear in wide-faced solid spur and helical gears. Mech. Mach. Theory 2010, 45, 911–924. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Zhang, J. Investigation on coupling effects between surface wear and dynamics in a spur gear system. Tribol. Int. 2016, 101, 383–394. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhao, Z.; Ma, H.; Han, H.; Chen, K. Effects of tooth modifications on the dynamic characteristics of thin-rimmed gears under surface wear. Mech. Mach. Theory 2020, 150, 103870. [Google Scholar] [CrossRef]
- Kahraman, A.; Blankenship, G. Effect of involute contact ratio on spur gear dynamics. J. Mech. Des. 1999, 1, 112–118. [Google Scholar] [CrossRef]
- Kahraman, A.; Singh, R. Non-linear dynamics of a spur gear pair. J. Sound Vib. 1990, 142, 49–75. [Google Scholar] [CrossRef]
- Zheng, X.; Luo, W.; Hu, Y.; He, Z.; Wang, S. Study on the Mesh Stiffness and Nonlinear Dynamics Accounting for Centrifugal Effect of High-speed Spur Gears. Mech. Mach. Theory 2022, 170, 104686. [Google Scholar] [CrossRef]
- Cooley, C.G.; Liu, C.; Dai, X.; Parker, R.G. Gear tooth mesh stiffness: A comparison of calculation approaches. Mech. Mach. Theory 2016, 105, 540–553. [Google Scholar] [CrossRef] [Green Version]
- Howard, I.; Jia, S.; Wang, J. The dynamic modelling of a spur gear in mesh including friction and a crack. Mech. Syst. Signal Processing 2001, 15, 831–853. [Google Scholar] [CrossRef]
- Tamminana, V.K.; Kahraman, A.; Vijayakar, S. A study of the relationship between the dynamic factors and the dynamic transmission error of spur gear pairs. J. Mech. Des. 2007, 129, 75–84. [Google Scholar] [CrossRef]
- Eritenel, T.; Parker, R.G. An investigation of tooth mesh nonlinearity and partial contact loss in gear pairs using a lumped-parameter model. Mech. Mach. Theory 2012, 56, 28–51. [Google Scholar] [CrossRef]
- Kahraman, A.; Bajpai, P.; Anderson, N.E. Influence of Tooth Profile Deviations on Helical Gear Wear. J. Mech. Des. 2005, 127, 1311. [Google Scholar] [CrossRef]
- Tang, J.-Y.; Liu, Y.-P. Loaded multi-tooth contact analysis and calculation for contact stress of face-gear drive with spur involute pinion. J. Cent. South Univ. 2013, 20, 354–362. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 20CrMoH | C | Si | Mn | Cr | Mo | P | S |
|---|---|---|---|---|---|---|---|
| Wt (%) | 0.17–0.23 | 0.17–0.37 | 0.55–0.90 | 0.85–1.25 | 0.15–0.35 | ≤0.03 | ≤0.03 |
| Parameters | Pinion | Gear | Parameters | Pinion | Gear |
|---|---|---|---|---|---|
| Number of teeth | 50 | 50 | Density (kg/m3) | 7850 | 7850 |
| Tooth width (mm) | 20 | 20 | Center distance (mm) | 150 | |
| Young’s modulus (GPa) | 210 | 210 | Backlash (μm) | 50 | |
| Pressure angle (°) | 20 | 20 | Involute contact ratio (ICR) | 1.77 | |
| Poisson’s ratio | 0.3 | 0.3 | Center distance (mm) | 150 | |
| Rotary inertia (kg·mm2) | 7.65 | 7.65 | - | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Hu, Y.; Zheng, X.; Yu, Y. A Calculation Method for Tooth Wear Depth Based on the Finite Element Method That Considers the Dynamic Mesh Force. Machines 2022, 10, 69. https://doi.org/10.3390/machines10020069
He Z, Hu Y, Zheng X, Yu Y. A Calculation Method for Tooth Wear Depth Based on the Finite Element Method That Considers the Dynamic Mesh Force. Machines. 2022; 10(2):69. https://doi.org/10.3390/machines10020069
Chicago/Turabian StyleHe, Zao, Yumei Hu, Xingyuan Zheng, and Yuanyuan Yu. 2022. "A Calculation Method for Tooth Wear Depth Based on the Finite Element Method That Considers the Dynamic Mesh Force" Machines 10, no. 2: 69. https://doi.org/10.3390/machines10020069
APA StyleHe, Z., Hu, Y., Zheng, X., & Yu, Y. (2022). A Calculation Method for Tooth Wear Depth Based on the Finite Element Method That Considers the Dynamic Mesh Force. Machines, 10(2), 69. https://doi.org/10.3390/machines10020069