
Speed-Sensorless Control of Induction Machines with LC Filter for Geothermal Electric Submersible Pumping Systems



Abstract
:1. Introduction
- a generic discretization framework for simple system and observer discretization and implementation;
- a novel LQR-based and gain-scheduled state-feedback controller (SCF) with solely three tuning parameters;
- a novel LQR-based and gain-scheduled full-state observer (FSO) with solely one tuning parameter; and
- comprehensive simulation and measurement results validating the proposed control system as simple, effective and robust alternative to available approaches in literature in the whole speed and torque range.
2. Description and State Space Model of Physical System
- (i)
- Voltage source inverter (VSI),
- (ii)
- inverter output filter (LC filter) and
- (iii)
- three-phase squirrel-cage induction machine (IM).
- (A1)
- Magnetic saturation is negligible and flux linkages depend linearly on the currents, i.e.,
- (A2)
- Quasi-constant speed: The mechanical system is significantly slower than the electrical system and, hence, can be considered a slowly time-varying parameter.
- (A3)
- Quasi-constant load: The load torque is a slowly varying disturbance and, hence, the synchronous speed becomes a slowly time-varying parameter, too.
- (A4)
- Measured quantities: Only dc link voltage and filter (input) currents are measured and available for feedback.
2.1. Continuous-Time (CT) System Description
2.2. Generic Discrete-Time (DT) System Description
3. Observer System
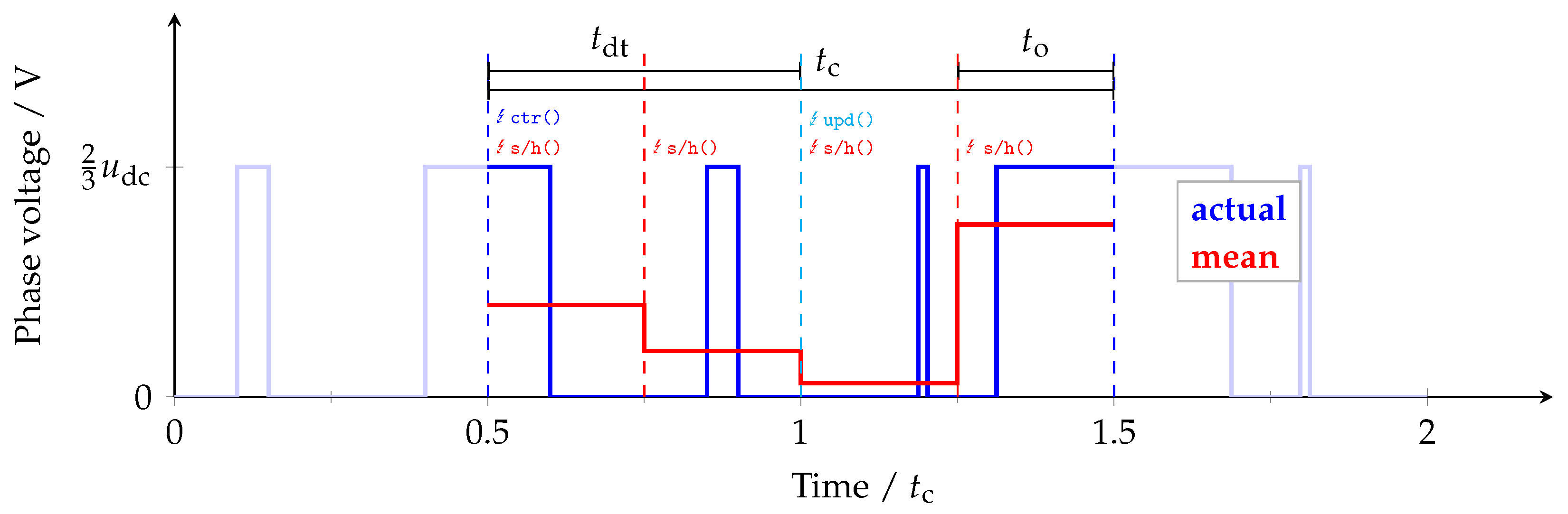
3.1. Oversampling and Voltage Reconstruction
3.2. Luenberger Observer with Gain-Scheduling
3.3. Speed Adaption
3.4. Flux Angle Detection
3.5. Stability of the Observer
4. Control System
4.1. Proportional-Integral Speed Controller with Anti-Windup
4.2. Feed-Forward Torque Controller and Rotor Flux Controller
4.3. State-Feedback Control of the Drive System
4.3.1. Discrete-Time Inverter Approximation
4.3.2. Continuous-Time Augmented System
4.3.3. Overall Discrete-Time System
4.3.4. State-Feedback Control Law with Prefilter
4.3.5. Prefilter Calculation
4.3.6. Output Saturation
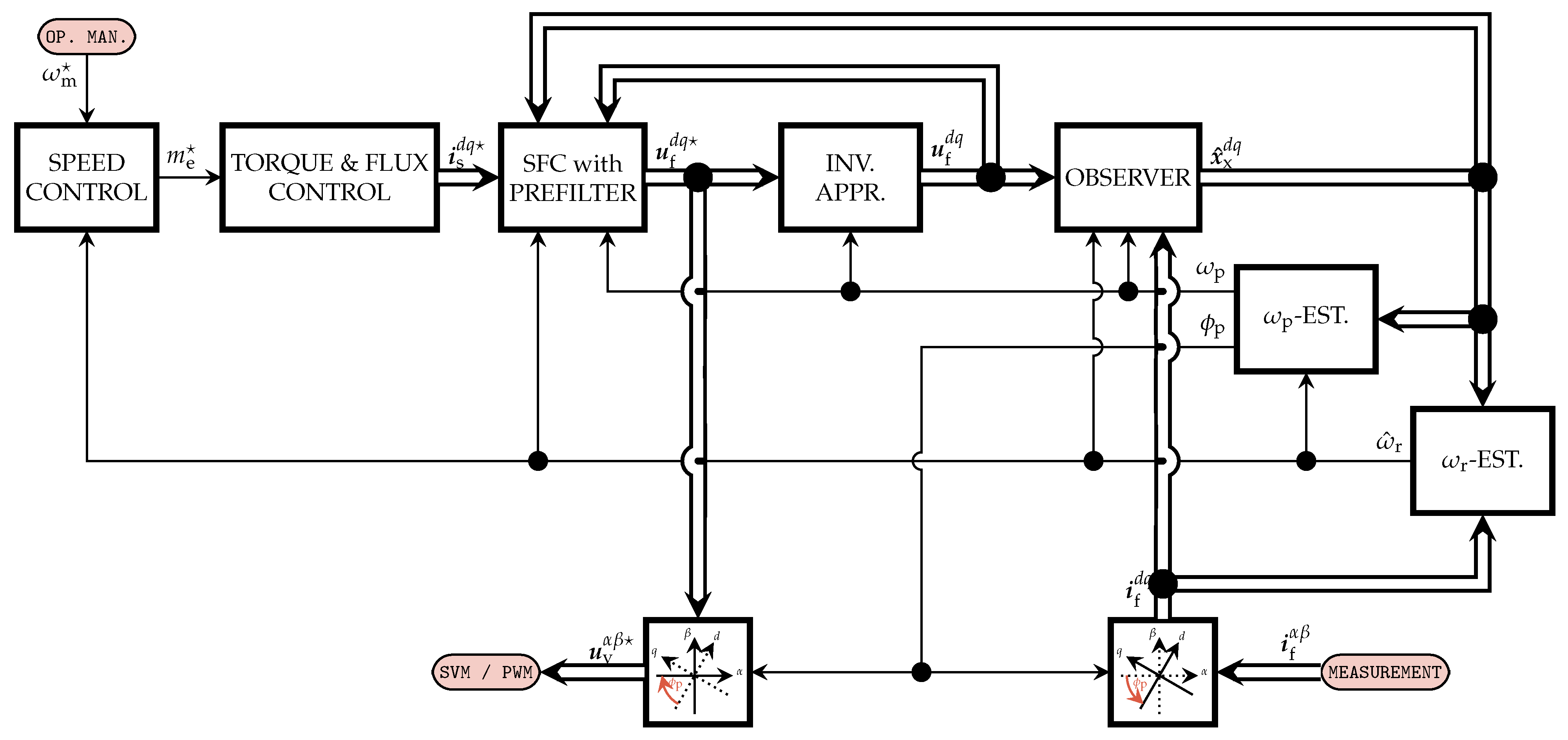
4.4. Implementation of the Control System
5. Experimental and Simulative Validation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Variable | Value | Unit | |
|---|---|---|---|---|
| VSI | DC-link voltage | 580 | ||
| Switching frequency | 4000 | |||
| Filter | Rated current (amplitude) | 22 | ||
| Inductance | 4.5 × 10−3 | |||
| Capacitance | 30 × 10−6 | |||
| Resistance | 0.1 | |||
| Induction machine | Rated speed (nameplate) | 298.4 | rad s−1 | |
| Rated torque | 10.05 | |||
| Rated voltage (amplitude) | 327 | |||
| Rated current (amplitude) | 8.1 | |||
| Rated power factor | 0.93 | 1 | ||
| Rated flux (amplitude) | 1.2 | |||
| Number of pole pairs | 1 | 1 | ||
| Stator resistance | 1.85 | |||
| Rotor resistance | 1.55 | |||
| Main inductance | 340 × 10−3 | |||
| Stator leakage inductance | 16.5 × 10−3 | |||
| Rotor leakage inductance | 16.5 × 10−3 | |||
| Control system | P-gain (speed estimator) | 0 | rad s−1 N−1 m−1 | |
| I-gain (speed estimator) | 1500 | rad s−2 N−1 m−1 | ||
| P-gain (speed control) | 0.42 | N m s rad−1 | ||
| I-gain (speed control) | 10.43 | N m rad−1 | ||
| P-gain (flux control) | 26.7 | H −1 | ||
| I-gain (flux control) | 670 | H −1 s−1 | ||
| 1. weighting factor (obs.) | 1.2 × 10−8 | 1 | ||
| 1. weighting factor (contr.) | 0.5 | 1 | ||
| 2. weighting factor (contr.) | 1 × 104 | 1 | ||
| 3. weighting factor (contr.) | 0.3 | 1 |
5.1. Simulation
5.2. Experimental Setup
5.3. Results & Discussion
- Scenario (S1)—Speed reversal (t ∈ [4 s–24 s]): In the first scenario, A speed reversal is performed under full load in order to evaluate the low speed performance of the closed-loop system. It is well-known that observability of electrical machines is lost at standstill (i.e., ). For induction machines, it is lost at zero excitation, i.e., , which occurs twice during the test and makes it most critical and crucial for validation in order to judge robustness of the speed-adaptive observer in terms of its zero-crossing capabilities.
- Scenario (S2)—Standstill (t ∈ [28 s–38 s]): The second scenario covers a standstill test under varying load. After a short period of full load, the load is ramped down slowly to zero. This test is conducted in order to evaluate and proof the low-speed capabilities of the closed-loop system at complete standstill and varying loads.
- Scenario (S3)—Field weakening (t ∈ [39 s–45 s]): In the third scenario, the high-speed capabilities of the closed-loop system are validated by performing a no-load acceleration from 0 rad s−1 to . After a short interval of high-speed operation, the speed is reset to standstill by means of active braking (generating mode). For a constant magnetic field, the induced voltage increases almost linearly with the speed, such that for rated excitation the voltage limit is reached for rated speed and load. Therefore, the magnetic field (rotor flux linkage) needs to be decreased in order to reach higher speeds than rated speed.
- Scenario (S4)—Load variations (t ∈ [47 s–59 s]): For the fourth scenario, step-like load variations disturb the closed-loop system while the speed must be kept constant at its rated value. Besides operation near the voltage limit which potentially triggers the anti-windup strategy (coniditional integration) of the integral control actions, the full controller bandwidth is evaluated and validated. The last scenario can be considered as typical (conventional) mode of operation in real-world ESP systems.
5.4. Experimantal Validation of the Control System
5.5. Experimantal and Simulative Validation of the Observer System
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Conversion |
| DSP | Digital Signal Processor |
| SFC | State-Feedback Controller |
| FSO | Full-State Obserer |
| LQR | Linear Quadratic Regulator |
| IM | Induction Machine |
| PI | Proportional-Integral (controller) |
| VSI | Voltage Source Inverter |
| MV | Medium-Voltage |
| PWM | Pulse Width Modulation |
| SVM | Space Vector Modulation |
Notation
References
- Kullick, J.; Hackl, C.M. Dynamic Modeling and Simulation of Deep Geothermal Electric Submersible Pumping Systems. Energies 2017, 10, 1659. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kar, N.C.; Liu, J. Load filter design method for medium voltage drive applications in electrical submersible pump systems. IEEE Trans. Ind. Appl. 2014, 51, 2017–2029. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Bayhan, S.; Moinoddin, S.; Malinowski, M.; Guzinski, J. Medium-Voltage Drives: Challenges and existing technology. IEEE Power Electron. Mag. 2016, 3, 29–41. [Google Scholar] [CrossRef]
- Smochek, M.; Pollice, A.F.; Rastogi, M.; Harshman, M. Long Cable Applications From a Medium-Voltage Drives Perspective. IEEE Trans. Ind. Appl. 2016, 52, 645–652. [Google Scholar] [CrossRef]
- Kojima, M.; Hirabayashi, K.; Kawabata, Y.; Ejiogu, E.C.; Kawabata, T. Novel vector control system using deadbeat-controlled PWM inverter with output LC filter. IEEE Trans. Ind. Appl. 2004, 40, 162–169. [Google Scholar] [CrossRef]
- Salomaki, J.; Hinkkanen, M.; Luomi, J. Sensorless Control of Induction Motor Drives Equipped With Inverter Output Filter. IEEE Trans. Ind. Electron. 2006, 53, 1188–1197. [Google Scholar] [CrossRef]
- Mukherjee, S.; Poddar, G. Fast Control of Filter for Sensorless Vector Control SQIM Drive With Sinusoidal Motor Voltage. IEEE Trans. Ind. Electron. 2007, 54, 2435–2442. [Google Scholar] [CrossRef]
- Hatua, K.; Jain, A.K.; Banerjee, D.; Ranganathan, V.T. Active Damping of Output LC Filter Resonance for Vector-Controlled VSI-Fed AC Motor Drives. IEEE Trans. Ind. Electron. 2012, 59, 334–342. [Google Scholar] [CrossRef]
- Guzinski, J.; Abu-Rub, H. Sensorless induction motor drive with voltage inverter and sine-wave filter. In Proceedings of the 2013 IEEE International Symposium on Sensorless Control for Electrical Drives and Predictive Control of Electrical Drives and Power Electronics (SLED/PRECEDE), Munich, Germany, 17–19 October 2013; pp. 1–8. [Google Scholar]
- Hinkkanen, M.; Luomi, J. Stabilization of regenerating-mode operation in sensorless induction motor drives by full-order flux observer design. IEEE Trans. Ind. Electron. 2004, 51, 1318–1328. [Google Scholar] [CrossRef] [Green Version]
- Kubota, H.; Matsuse, K.; Nakano, T. DSP-based speed adaptive flux observer of induction motor. IEEE Trans. Ind. Appl. 1993, 29, 344–348. [Google Scholar] [CrossRef]
- Hofmann, H.; Sanders, S. Speed-sensorless vector torque control of induction machines using a two-time-scale approach. IEEE Trans. Ind. Appl. 1998, 34, 169–177. [Google Scholar] [CrossRef]
- Holtz, J.; Quan, J. Sensorless vector control of induction motors at very low speed using a nonlinear inverter model and parameter identification. IEEE Trans. Ind. Appl. 2002, 38, 1087–1095. [Google Scholar] [CrossRef]
- Tajima, H.; Guidi, G.; Umida, H. Consideration about problems and solutions of speed estimation method and parameter tuning for speed-sensorless vector control of induction motor drives. IEEE Trans. Ind. Appl. 2002, 38, 1282–1289. [Google Scholar] [CrossRef]
- Kubota, H.; Sato, I.; Tamura, Y.; Matsuse, K.; Ohta, H.; Hori, Y. Regenerating-mode low-speed operation of sensorless induction motor drive with adaptive observer. IEEE Trans. Ind. Appl. 2002, 38, 1081–1086. [Google Scholar] [CrossRef]
- Suwankawin, S.; Sangwongwanich, S. Design strategy of an adaptive full-order observer for speed-sensorless induction-motor Drives-tracking performance and stabilization. IEEE Trans. Ind. Electron. 2006, 53, 96–119. [Google Scholar] [CrossRef]
- Sangwongwanich, S.; Suwankawin, S.; Po-ngam, S.; Koonlaboon, S. A Unified Speed Estimation Design Framework for Sensorless AC Motor Drives Based on Positive-Real Property. In Proceedings of the 2007 Power Conversion Conference, Nagoya, Japan, 2–5 April 2007; pp. 1111–1118. [Google Scholar]
- Qu, Z.; Hinkkanen, M.; Harnefors, L. Gain Scheduling of a Full-Order Observer for Sensorless Induction Motor Drives. IEEE Trans. Ind. Appl. 2014, 50, 3834–3845. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Yu, Y.; Wang, G.; Li, B.; Xu, D. Design Method of Adaptive Full Order Observer With or Without Estimated Flux Error in Speed Estimation Algorithm. IEEE Trans. Power Electron. 2016, 31, 2609–2626. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, Y.; Yu, Y.; Wang, G.; Xu, D.; Dong, Z. Speed-Sensorless Induction Machine Control in the Field-Weakening Region Using Discrete Speed-Adaptive Full-Order Observer. IEEE Trans. Power Electron. 2016, 31, 5759–5773. [Google Scholar] [CrossRef]
- Yin, Z.; Zhang, Y.; Du, C.; Liu, J.; Sun, X.; Zhong, Y. Research on Anti-Error Performance of Speed and Flux Estimation for Induction Motors Based on Robust Adaptive State Observer. IEEE Trans. Ind. Electron. 2016, 63, 3499–3510. [Google Scholar] [CrossRef]
- Zaky, M.S.; Metwaly, M.K. Sensorless Torque/Speed Control of Induction Motor Drives at Zero and Low Frequencies With Stator and Rotor Resistance Estimations. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1416–1429. [Google Scholar] [CrossRef]
- Zerdali, E.; Barut, M. The Comparisons of Optimized Extended Kalman Filters for Speed-Sensorless Control of Induction Motors. IEEE Trans. Ind. Electron. 2017, 64, 4340–4351. [Google Scholar] [CrossRef]
- Zaky, M.S.; Kamel Metwally, M.; Azazi, H.; Deraz, S. A New Adaptive SMO for Speed Estimation of Sensorless Induction Motor Drives at Zero and Very Low Frequencies. IEEE Trans. Ind. Electron. 2018, 65, 6901–6911. [Google Scholar] [CrossRef]
- Chen, J.; Huang, J. Globally Stable Speed-Adaptive Observer With Auxiliary States for Sensorless Induction Motor Drives. IEEE Trans. Power Electron. 2019, 34, 33–39. [Google Scholar] [CrossRef]
- Harnefors, L.; Hinkkanen, M. Stabilization Methods for Sensorless Induction Motor Drives—A Survey. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 132–142. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Harnefors, L.; Luomi, J. Reduced-Order Flux Observers With Stator-Resistance Adaptation for Speed-Sensorless Induction Motor Drives. IEEE Trans. Power Electron. 2010, 25, 1173–1183. [Google Scholar] [CrossRef]
- Hackl, C.M. Non-Identifier Based Adaptive Control in Mechatronics: Theory and Application; Springer International Publishing: Berlin, Germany, 2017. [Google Scholar]
- Harnefors, L.; Hinkkanen, M. Complete Stability of Reduced-Order and Full-Order Observers for Sensorless IM Drives. IEEE Trans. Ind. Electron. 2008, 55, 1319–1329. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering, 5th ed.; Instrumentation and Controls Series; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Schauder, C. Adaptive speed identification for vector control of induction motors without rotational transducers. IEEE Trans. Ind. Appl. 1992, 28, 1054–1061. [Google Scholar] [CrossRef]
- Yang, G.; Chin, T.H. Adaptive-speed identification scheme for a vector-controlled speed sensorless inverter-induction motor drive. IEEE Trans. Ind. Appl. 1993, 29, 820–825. [Google Scholar] [CrossRef]
- Suwankawin, S.; Sangwongwanich, S. A speed-sensorless IM drive with decoupling control and stability analysis of speed estimation. IEEE Trans. Ind. Electron. 2002, 49, 444–455. [Google Scholar] [CrossRef]
- Schröder, D.; Böcker, J. (Eds.) Elektrische Antriebe–Regelung von Antriebssystemen; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Goodwin, G.C.; Graebe, S.F.; Salgado, M.E. Control System Design, 1st ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2000. [Google Scholar]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kullick, J.; Hackl, C.M. Speed-Sensorless Control of Induction Machines with LC Filter for Geothermal Electric Submersible Pumping Systems. Machines 2022, 10, 87. https://doi.org/10.3390/machines10020087
Kullick J, Hackl CM. Speed-Sensorless Control of Induction Machines with LC Filter for Geothermal Electric Submersible Pumping Systems. Machines. 2022; 10(2):87. https://doi.org/10.3390/machines10020087
Chicago/Turabian StyleKullick, Julian, and Christoph M. Hackl. 2022. "Speed-Sensorless Control of Induction Machines with LC Filter for Geothermal Electric Submersible Pumping Systems" Machines 10, no. 2: 87. https://doi.org/10.3390/machines10020087
APA StyleKullick, J., & Hackl, C. M. (2022). Speed-Sensorless Control of Induction Machines with LC Filter for Geothermal Electric Submersible Pumping Systems. Machines, 10(2), 87. https://doi.org/10.3390/machines10020087