
Comparison and Verification of Dynamic Simulations and Experiments for a Modified Spur Gear Pair


Abstract
:1. Introduction
2. Simulations of the Modified Spur Gear Pair
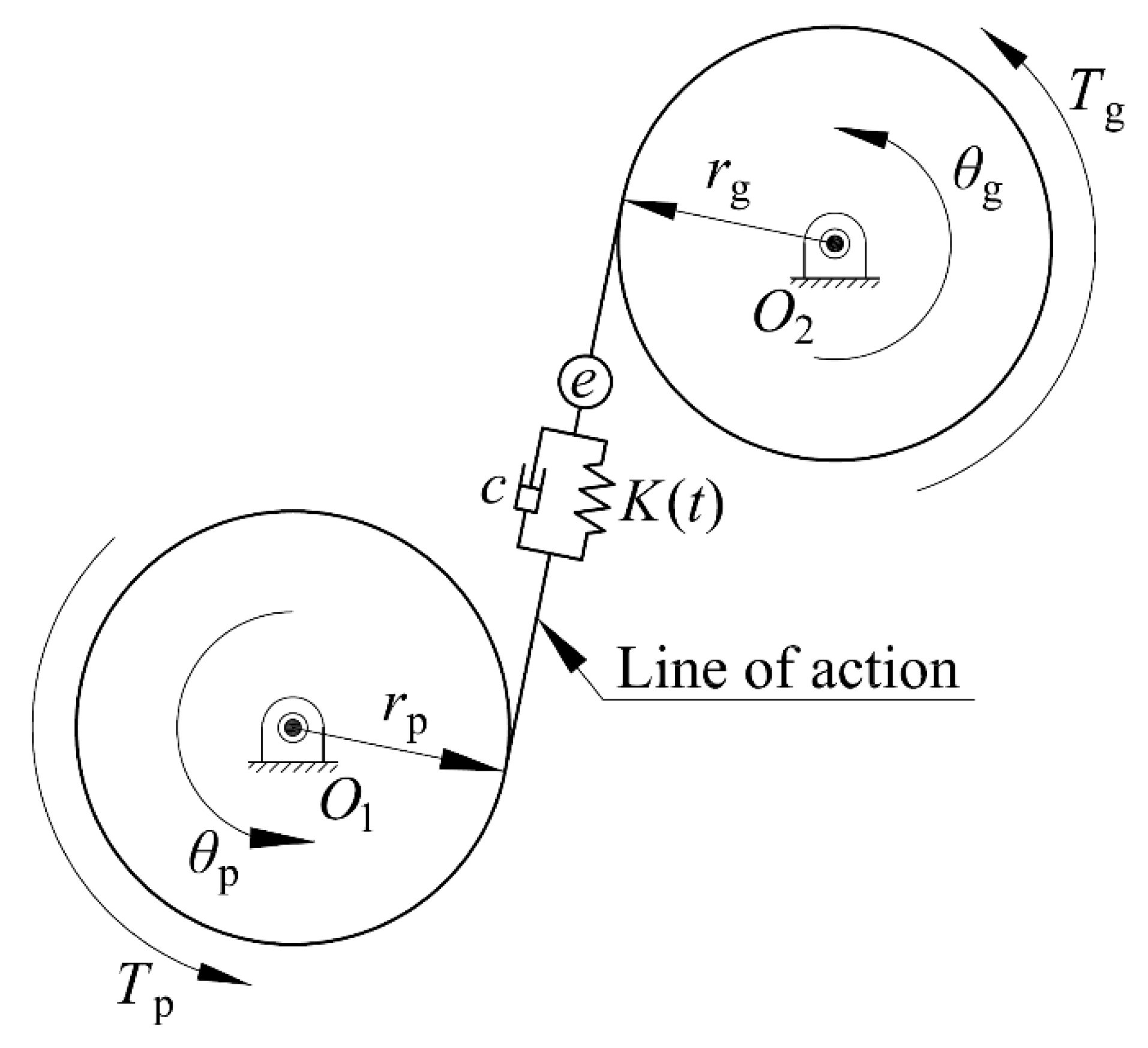
2.1. Mathematical Model
2.2. LTCA
2.2.1. Contact Stress and Contact Pattern
2.2.2. Mesh Stiffness
2.3. Dynamic Analysis
3. Dynamic Experiments
3.1. Experimental Framework
3.2. Experimental DTE
4. Model Verification and Discussion
5. Conclusions
- On the basis of the mathematical model developed in this study, mesh generation codes, FEA, and static LTCA of a modified spur gear pair were performed to predict the contact stress, contact patterns, and time-varying mesh stiffness under various loads.
- A dynamic model for a spur gear pair was presented to solve DTEs under various speeds and loads.
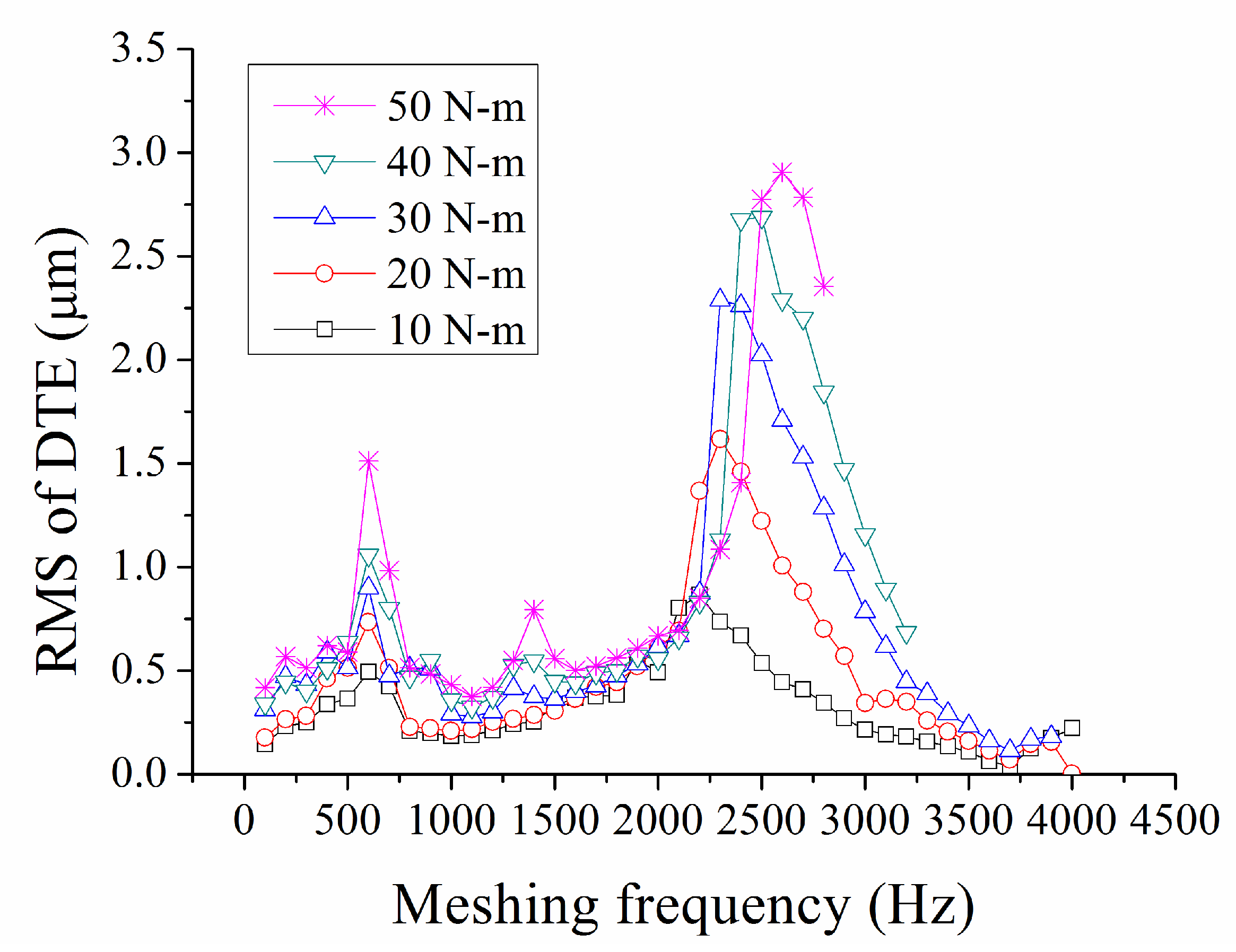
- For experimental determination of the dynamic characteristics, a parallel-axis gear dynamic tester was constructed and used for the modified spur gear pair with various speeds and loads. After signal processing, the experimental DTE signals were calculated; the experimental RMS of the DTE was also calculated and plotted. The text continues here.
- A comparison of the simulation and experimental results revealed that the predicted natural frequencies were similar to those determined in the experiments. In addition, the patterns of the simulated and experimental RMS curves were consistent. As the load was increased, the DTE at the natural frequency gradually increased. In general, the difference in the natural frequencies between simulation and experimental results was approximately 2–13%.
- The simulation methodology presented in this study can predict the dynamic characteristics of the modified spur gear pair under various operational conditions. Therefore, a reliable and efficient design simulation method for predicting the static and dynamic behaviors of a modified spur gear pair is proposed in this study. Further integration of the proposed simulation program with optimization will be performed in future studies.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smith, J.D. Gear Noise and Vibration, 2nd ed.; Marcel Dekker: New York, NY, USA, 2003. [Google Scholar]
- Smith, R.E. Solving Gear Noise and Vibration Problems; American Gear Manufacturers Association: Alexandria, VA, USA, 1985. [Google Scholar]
- BS 436-2; Spur and Helical Gears Part 2: Basic Rack Form, Modules and Accuracy (1 to 50 Metric Module). British Standards Institution (BSI): London, UK, 1970.
- ISO 6336-1; Calculation of Load Capacity of Spur and Helical Gears—Part 1: Basic Principles, Introduction and General Influence Factors. International Standard Organization (ISO): Geneva, Switzerland, 2006.
- AGMA 109.16; Profile and Longitudinal Corrections on Involute Gears. American Gear Manufacturers Association (AGMA): Chicago, IL, USA, 1965.
- Litvin, F.L. Theory of Gearing; National Aeronautics and Space Administration, Scientific and Technical Information Division: Washington, DC, USA, 1989. [Google Scholar]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory, 2nd ed.; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]
- Tsay, C.B. Helical Gears with Involute Shaped Teeth: Geometry, Computer Simulation, Tooth Contact Analysis, and Stress Analysis. J. Mech. Trans. Automation. 1988, 110, 482–491. [Google Scholar] [CrossRef]
- Chen, Y.C.; Tsay, C.B. Stress Analysis of a Helical Gear Set with Localized Bearing Contact. Finite Elem. Anal. Des. 2002, 38, 707–723. [Google Scholar] [CrossRef]
- Parker, R.; Vijayakar, S.; Imajo, T. Non-linear Dynamic Response of a Spur Gear Pair: Modelling and Experimental Comparisons. J. Sound Vib. 2000, 237, 435–455. [Google Scholar] [CrossRef] [Green Version]
- Tamminana, V.K.; Kahraman, A.; Vijayakar, S. A Study of the Relationship between the Dynamic Factors and the Dynamic Transmission Error of Spur Gear Pairs. J. Mech. Des. 2007, 129, 75–84. [Google Scholar] [CrossRef]
- Faggioni, M.; Samani, F.S.; Bertacchi, G.; Pellicano, F. Dynamic Optimization of Spur Gears. Mech. Mach. Theory 2011, 46, 544–557. [Google Scholar] [CrossRef]
- Umezawa, K.; Suzuki, T.; Houjoh, H.; Sato, T. Vibration of Power Transmission Helical Gear—The Effect of Contact Ratio on the Vibration. Bull. JSME 1985, 28, 694–700. [Google Scholar] [CrossRef]
- Ogawa, Y.; Matsumura, S.; Houjoh, H.; Sato, T. Rotational Vibration of a Spur Gear Pair Having Tooth Helix Deviation (Effect of Lead Modifications). In Proceedings of the 2003 ASME Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 2–6 September 2003; pp. 433–440. [Google Scholar]
- Houjoh, H.; Ratanasumawong, C.; Matsumura, S. Utilization of Synchronous Averaging for Inspection of Tooth Surface Undulations on Gears (Localization of Nonmesh Harmonic Components to Individual Gear). J. Appl. Mech. 2007, 74, 269. [Google Scholar] [CrossRef]
- Du, J.; Hu, L.; Mao, J.; Zhang, Y. Optimal Vibration Suppression Modification Method for High-Speed Helical Gear Transmission of Battery Electric Vehicles under Full Working Conditions. Machines 2021, 9, 226. [Google Scholar] [CrossRef]
- Masoumi, A.; Pellicano, F.; Samani, F.S.; Barbieri, M. Symmetry breaking and chaos induced imbalance in planetary gears. Nonlinear Dyn. 2015, 80, 561–582. [Google Scholar] [CrossRef]
- Gelman, L.; Chandra, N.H.; Kurosz, R.; Pellicano, F.; Barbieri, M.; Zippo, A. Novel spectral kurtosis technology for adaptive vibration condition monitoring of multi-stage gearboxes. Insight Non-Destr. Test. Cond. Monit. 2016, 58, 409–416. [Google Scholar] [CrossRef]
- Ambarisha, V.K.; Parker, R.G. Nonlinear dynamics of planetary gears using analytical and finite element models. J. Sound Vib. 2007, 302, 577–595. [Google Scholar] [CrossRef]
- Bahk, C.J.; Parker, R.G. Analytical solution for the nonlinear dynamics of planetary gears. J. Comput. Nonlinear Dyn. 2011, 6, 1–15. [Google Scholar] [CrossRef]
- Amabili, M.; Rivola, A. Dynamic analysis of spur gear pairs: Steady-state responded and stability of the SDOF model with time-varying meshing damping. Mech. Syst. Signal Process. 1997, 11, 375–390. [Google Scholar] [CrossRef]
- Kahraman, A.; Singh, R. Non-Linear Dynamics of a Geared Rotor-Bearing System with Multiple Clearances. J. Sound Vib. 1991, 144, 469–506. [Google Scholar] [CrossRef]
- Kahraman, A.; Blankenship, G. Effect of Involute Tip Relief on Dynamic Response of Spur Gear Pairs. J. Mech. Des. 1999, 121, 313–315. [Google Scholar] [CrossRef]
- Hotait, M.A.; Kahraman, A. Experiments on the Relationship between the Dynamic Transmission Error and the Dynamic Stress Factor of Spur Gear Pairs. Mech. Mach. Theory 2013, 70, 116–128. [Google Scholar] [CrossRef]
- Inalpolat, M.; Handschuh, M.; Kahraman, A. Influence of Indexing Errors on Dynamic Response of Spur Gear Pairs. Mech. Syst. Signal Process. 2015, 60, 391–405. [Google Scholar] [CrossRef]
- Benatar, M.; Handschuh, M.; Kahraman, A.; Talbot, D. Static and Dynamic Transmission Error Measurements of Helical Gear Pair with Various Tooth Modifications. J. Mech. Des. 2019, 141, 103301. [Google Scholar] [CrossRef]
- Bruyere, J.; Velex, P.; Guilbert, B.; Houser, D.R. An Analytical Study on the Combination of Profile Relief and Lead Crown Minimizing Transmission Error in Narrow-faced Helical Gears. Mech. Mach. Theory 2019, 136, 224–243. [Google Scholar] [CrossRef]
- Villalba, R.T.; Ramirez, H.M.; Estrada, H.A. Classification of Design Methodologies to Minimize Vibrations in Gears and Bearings in the 21st Century: A Review. Machines 2021, 9, 212. [Google Scholar] [CrossRef]
- Wang, Z.G.; Chen, Y.C. Design of a Helical Gear Set with Adequate Linear Tip-relief Leading to Improved Static and Dynamic Characteristics. Mech. Mach. Theory 2020, 147, 103742. [Google Scholar] [CrossRef]
- Cai, Y. Simulation on the rotational vibration of helical gears in consideration of the tooth separation phenomenon (A new stiffness function of helical involute tooth pair). J. Mech. Des. 1995, 117, 460–469. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Pinion | Gear |
|---|---|---|
| Normal module | 2.5 mm | 2.5 mm |
| Number of teeth | 60 | 60 |
| Normal pressure angle | 20° | 20° |
| Face width | 20 mm | 20 mm |
| Amount of tip-relief (Ca) | 6 μm | 6 μm |
| Length of tip-relief (La) | 1.16 mm (short) | 1.16 mm (short) |
| Amount of longitudinal crowning (E) | 10 μm | − |
| Root fillet radius | 0.625 mm | 0.625 mm |
| Pitch diameter | 150 mm | 150 mm |
| Root diameter | 143.75 mm | 143.75 mm |
| Materials and heat treatment | SCM420 with carburization | |
| Hardening grade | HRC 55 | |
| Load (N-m) | Natural Frequency | RMS of DTE | ||||
|---|---|---|---|---|---|---|
| Simulation (Hz) | Experiment (Hz) | Difference (%) | Simulation (μm) | Experiment (μm) | Difference (%) | |
| 10 | 1950 | 2200 | 12.8 | 1.328 | 0.866 | 34.8 |
| 20 | 2150 | 2300 | 7.0 | 2.833 | 1.619 | 42.9 |
| 30 | 2300 | 2350 | 2.2 | 3.828 | 2.276 | 40.5 |
| 40 | 2400 | 2450 | 2.1 | 4.570 | 2.682 | 41.3 |
| 50 | 2500 | 2600 | 6.1 | 4.760 | 2.906 | 38.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.-G.; Lo, C.-C.; Chen, Y.-C. Comparison and Verification of Dynamic Simulations and Experiments for a Modified Spur Gear Pair. Machines 2022, 10, 191. https://doi.org/10.3390/machines10030191
Wang Z-G, Lo C-C, Chen Y-C. Comparison and Verification of Dynamic Simulations and Experiments for a Modified Spur Gear Pair. Machines. 2022; 10(3):191. https://doi.org/10.3390/machines10030191
Chicago/Turabian StyleWang, Zhi-Gen, Chien-Cheng Lo, and Yi-Cheng Chen. 2022. "Comparison and Verification of Dynamic Simulations and Experiments for a Modified Spur Gear Pair" Machines 10, no. 3: 191. https://doi.org/10.3390/machines10030191
APA StyleWang, Z. -G., Lo, C. -C., & Chen, Y. -C. (2022). Comparison and Verification of Dynamic Simulations and Experiments for a Modified Spur Gear Pair. Machines, 10(3), 191. https://doi.org/10.3390/machines10030191