1. Introduction
With the rapid development of modern space technology, the flexible manipulator plays an important role in space maintenance, machining, and assembly due to its advantages of low energy consumption and large load–weight ratio [
1,
2]. However, flexible manipulators are prone to vibration due to the existence of structural flexibility. Therefore, the vibration control problem has attracted extensive attention [
3,
4,
5].
When performing some reciprocating work, such as spot welding, spray painting, carrying, and assembly, the flexible manipulator may be subjected to periodic external excitation. If the excitation frequency is close to the natural frequency of the flexible manipulator, primary resonance will occur [
6]. In this case, even a small external excitation can abruptly excite large amplitude vibration and deteriorate working performance. Up to now, various nonlinear characteristics and stability problems of the primary resonance have been researched. Silva and Daqaq [
7] analyzed the nonlinear vibration response of a sender cantilever beam with constant thickness and linearly varying width when subjected to a primary resonance excitation. Mokhtari and Jalili et al. [
8] modeled a milling tool as a 3D spinning cantilever Timoshenko beam and investigated the primary resonance and the bifurcation behavior during micro-milling operations. Gao and Hou et al. [
9] discussed the effect of the linear stiffness and the nonlinear stiffness of the inter-shaft bearing on the primary resonance and found the jump phenomenon and the resonance hysteresis phenomenon of a dual-rotor system. Kumar and Pratiher [
10] studied the primary resonance behavior of the two-link flexible manipulator with a generic payload and constraint force through numerical simulations. They found the jump phenomenon and the existence of multi-valued solutions at pitchfork and saddle-node bifurcation points. Ding and Huang et al. [
11] investigated the primary resonance of traveling viscoelastic beam under 3:1 internal resonance. Lajimi and Heppler et al. [
12] used the method of multiple scales and the shooting method to study primary resonance of a beam-rigid body microgyroscope. Li and Yao et al. [
13] studied the effects of control gains on primary resonance properties of the beam. Bab and Khadem et al. [
14] investigated the primary resonances of a coupled flexible rotor with rigid disk and flexible/rigid blades. Zhang and Chen et al. [
15] analyzed the primary resonance of coupled cantilevers subjected to magnetic interaction based on the distributed parameter model. Li and Zhou et al. [
16] studied the primary resonance with internal resonance of a symmetric rectangular honeycomb sandwich panel with simply supported boundaries along all four edges subjected to transverse excitations. Yektanezhad and Hosseini et al. [
17] investigated primary resonance of a flexible rotor levitated by active magnetic bearings (AMBs). Gu and Zhang et al. [
18] investigated the primary resonance of the functionally graded graphene platelet (FGGP)-reinforced rotating pre-twisted composite blade under combined external and multiple parametric excitations with three different distribution patterns. Arena and Lacarbonara [
19] implemented bifurcation analysis to investigate the primary resonances induced by the harmonic axial excitation.
In order to deal with the vibration problems, many active control methods have been put forward. However, most of them are effective for non-resonant vibration but not for primary resonance. In recent years, the saturation phenomenon has attracted the attention of many researchers. This phenomenon usually occurs in a quadratic nonlinear system under the harmonic excitation if the ratio of two modal frequencies is 1:2 and the internal resonance has been established between these two modes. When the excitation frequency is close to the high-order modal frequency of the system, the higher-order modal response will increase. When the saturation occurs, the higher modal response will no longer increase after it reaches a critical value, and the rest of vibration energy is transferred to the lower-order mode. Nayfeh and Mook [
20] first discovered the saturation phenomenon by analyzing the coupling between the roll and pitch motion of ships. Haddow and Barr et al. [
21] verified the saturation phenomenon by the modal interaction experiment of an L-shaped beam and suggested a saturation-based vibration absorber for controlling the primary resonance of a flexible structure. Subsequently, Oueini and Nayfeh et al. [
22] proposed an active saturation-based method for controlling the primary resonance of a rigid and a flexible beam, respectively, and designed an analog circuit to verify the feasibility of the suggested method. Pai and Wen et al. [
23] used PZT (lead zirconate titanate) patches as a controller and sensor to study the nonlinear saturation control of a cantilever beam. Saguranrum and Kunz et al. [
24] numerically simulated the saturation control response and the full mode coupling of the cantilever beam with a piezoelectric actuator. Shoeybi and Ghorashi [
25] conducted a theoretical investigation of nonlinear vibrations of a 2-DOF system when subjected to saturation. Li et al. [
26] used the method of multiple scales to obtain an approximate analytical solution and presented a control strategy based on nonlinear saturation to suppress the free vibration of a self-excited plant. Zhao and Xu [
27] applied the delayed feedback control and saturation control to suppress or stabilize the vibration of the primary system in a 2-DOF dynamical system with parametrically excited pendulum. Eftekhari and Ziaei-Rad [
28] investigated the performance of an oscillator consisting of mass and spring at the tip of a symmetrical cantilever composite beam under chordwise base excitation and detected saturation phenomenon in the force modulation response at the one-to-one internal resonance. Febbo and Machado [
29] studied nonlinear dynamic vibration absorbers with a saturation. Chen and Zhang [
30] investigated forced vibration for two elastically connected cantilevers under harmonic base excitation, and the frequency amplitude response curves revealed saturation phenomena. Zhang and Liu et al. [
31] analyzed the saturation and jump phenomena of a rotating pre-twisted laminated composite blade subjected to a subsonic airflow excitation in the case of 1:2 internal resonance. Rocha and Tusset et al. [
32] used the piezoelectric material to harvest the energy of a portal frame structure and found that the energy transfer efficiency can be enhanced by coupling the PZT to the column in saturation phenomena. Bauomy and Taha [
33] studied the nonlinear vibrating behaviors of a nonlinear cantilever beam system (primary system) using a nonlinear saturation absorber (the secondary system).
Although saturation-based research has been conducted, it still faces big challenges when dealing with the primary resonance of a flexible manipulator. First, all the above studies are focused on a flexible structure without rigid motion. For a flexible multi-body mechanism undergoing a large overall motion, however, its dynamic model is completely different from that of a flexible structure due to complex rigid–flexible motion coupling and force transfer. To the authors’ knowledge, whether the saturation can be established and utilized to suppress the primary resonance of a flexible mechanism has not been researched. Second, most studies simplified the controlled main system as a linear vibration system for the convenience of analysis. However, a real system is usually a nonlinear system. Excessive neglect of nonlinear elements may lead to a mismatch with reality. Third, the saturation depends on the coupling between the controlled main system and the vibration absorber. However, this coupling relationship is artificially designated in most studies for the convenience of analysis and is not derived from a rigorous kinematic and dynamic relationship. Finally, most studies are based on numerical simulations of their own theoretical models and have not been verified by third-party software or experiments.
In view of this, this paper aims to put forward a new nonlinear saturation-based control method to suppress the primary resonance of the flexible manipulator undergoing a large overall motion. The rest of the paper is organized as follows. In
Section 2, a controlled flexible manipulator is described. In
Section 3, a new primary resonance control scheme is designed and a saturation-based control model of the vibration absorber is put forward. The dynamic equations of the flexible manipulator with the saturation-based vibration absorber are derived in
Section 4. Because the saturation depends on the internal resonance,
Section 5 investigates the establishment of the internal resonance.
Section 6 reveals the saturation principle.
Section 7 presents the method of absorber configuration to optimize saturation control. On this basis, a series of virtual prototyping simulations and experiments are conducted to verify the feasibility of the suggested saturation-based control method in
Section 8 and
Section 9.
Section 10 explains the inaccurate correspondence of theory, prototype simulation, and experiment results. Finally,
Section 11 summarizes the conclusions of this study.
2. Description of Flexible Manipulator
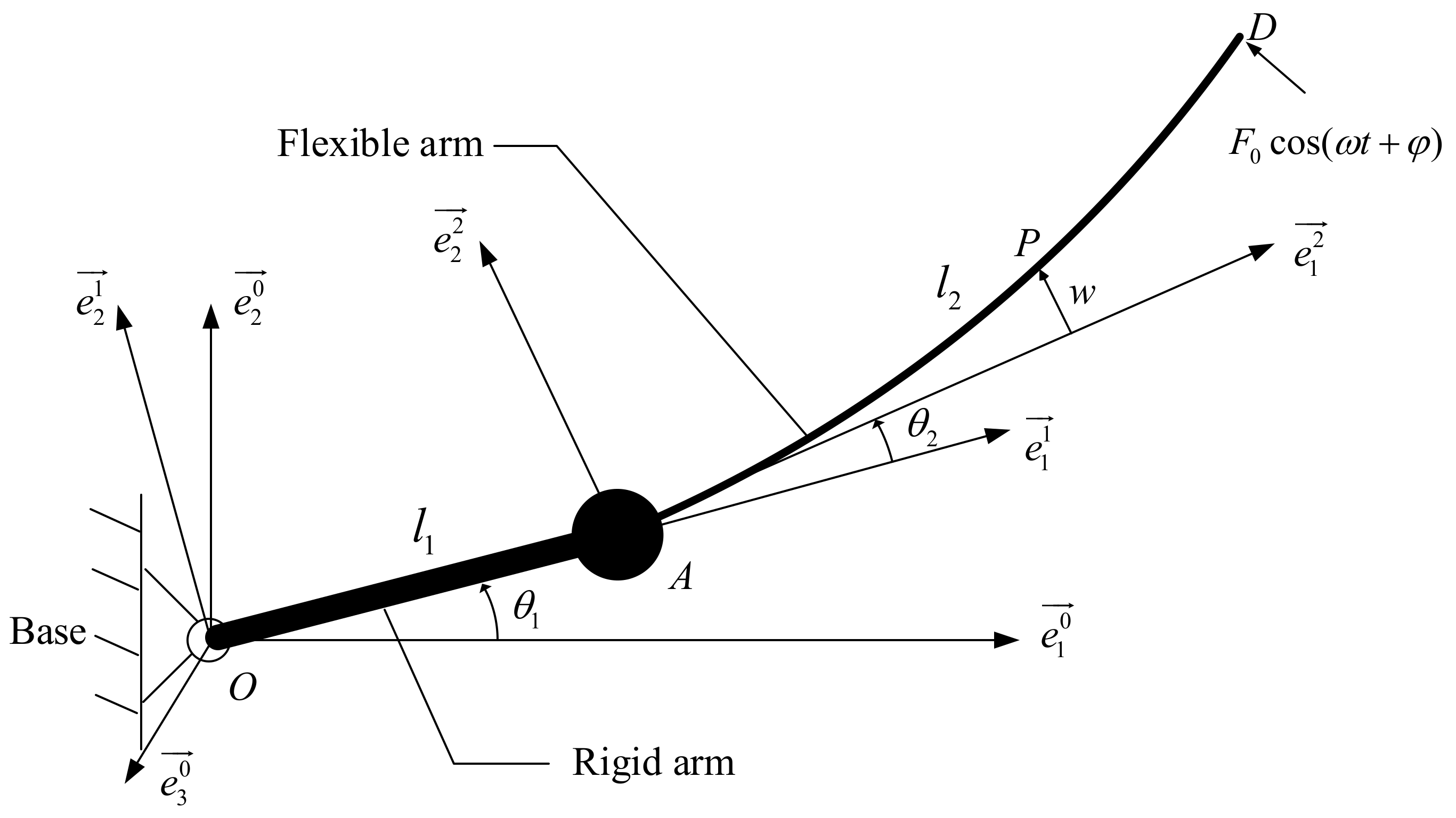
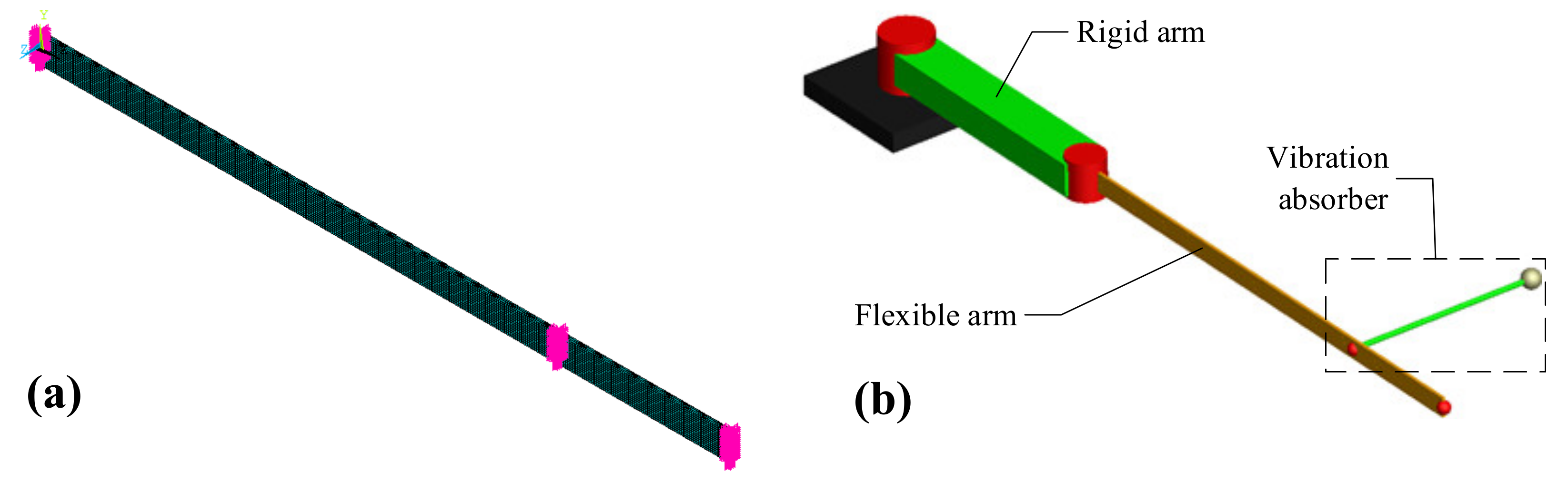
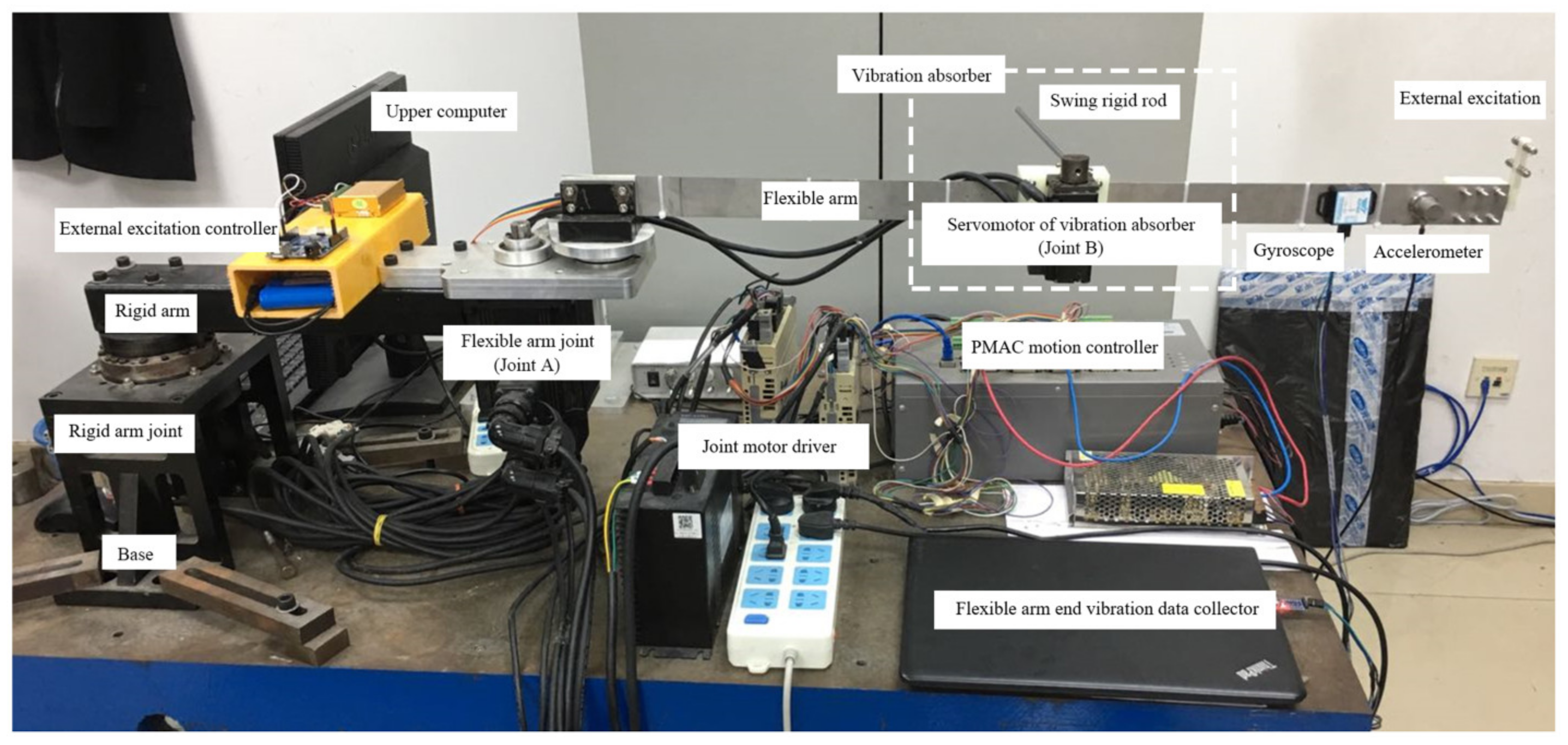
As shown in
Figure 1, the flexible manipulator consists of a base, a rigid arm, and a flexible arm. The expression
is the inertial coordinate system fixed on the base;
and
are the moving coordinate systems attached to the rigid and flexible arms, respectively. The rigid arm
is hinged to the driving joint
, whose angular displacement is denoted by
, where
is time. The flexible arm
is hinged to the driving joint
at the end of the rigid arm, whose angular displacement is denoted by
.
Due to the large span-to-height ratio, the flexible arm is regarded as a uniform Euler–Bernoulli beam. Only the transverse deformation of the flexible arm in
is considered, which is denoted by
, where
x denotes the length measured along
. Using the assumed mode method [
3], the deformation
is discretized as
where
is the number of the flexural degrees of freedom,
is the
ith order model shape, and
is the
ith mode coordinate.
Because the fundamental mode usually plays a major role in the dynamic responses of the flexible arm, only the fundamental mode is considered. Therefore, Equation (1) is rewritten as
When the flexible manipulator is subjected to the external excitation at the same frequency as its natural frequency, the primary resonance will occur. It may excite large amplitude in a short time and thus deteriorate the working performance and lead to system damage. Therefore, it is necessary to suppress the primary resonance. In view of this, a saturation-based control method is put forward in this paper to suppress the primary resonance of the flexible manipulator.
3. Control Model of Saturation-Based Vibration Absorber
Among various nonlinear interactions, saturation is a special energy exchange mechanism of a multiple degrees-of-freedom nonlinear system. Its generation depends on the establishment of the 1:2 internal resonance. When the saturation phenomenon occurs in a nonlinear system excited at a frequency near its high-order modal frequency, the primary resonance response of the high-order mode will be restricted to a small ceiling, and the rest of the vibration energy will be transferred to the low-order mode with the help of an energy exchange channel provided by the internal resonance.
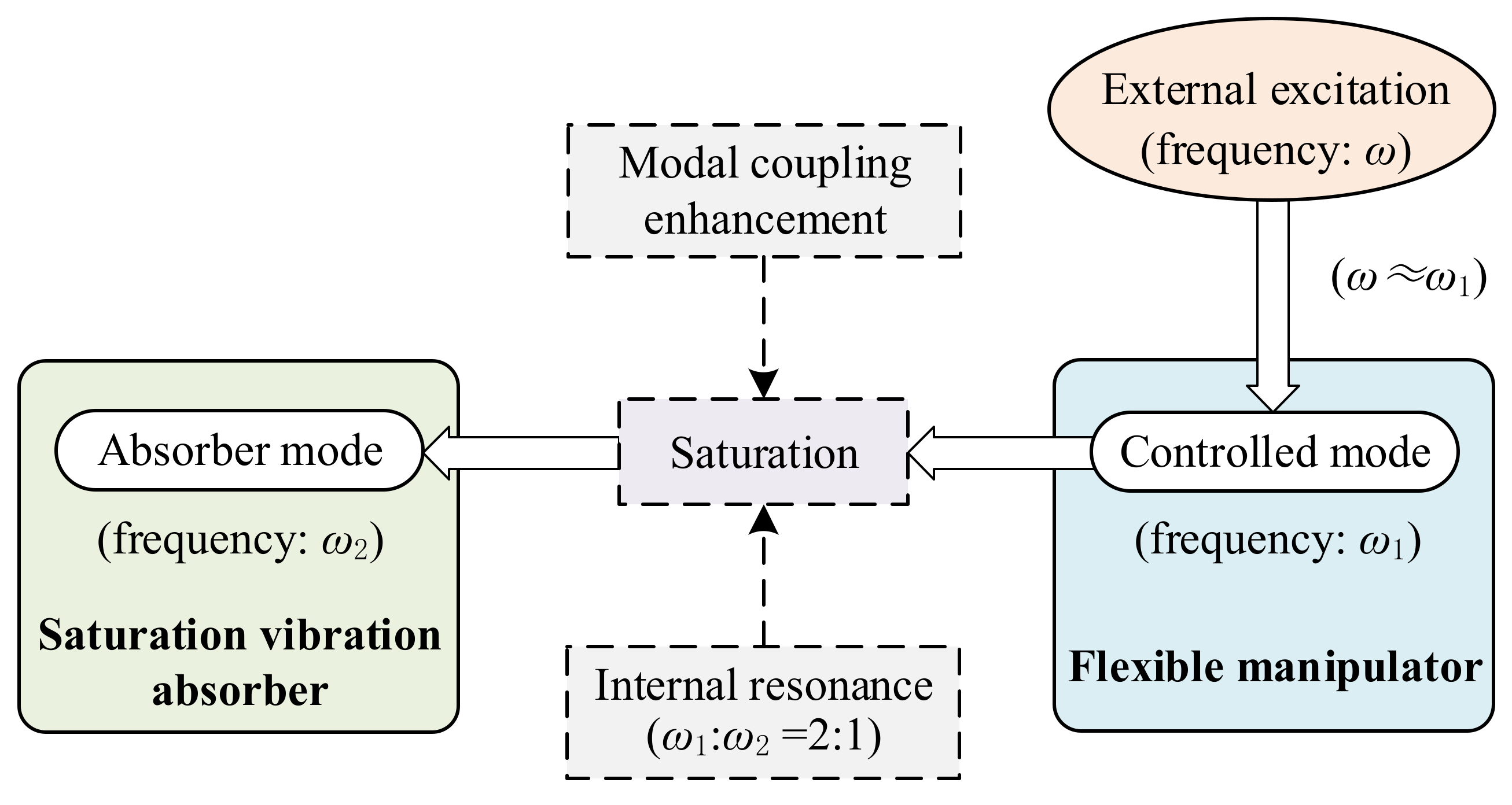
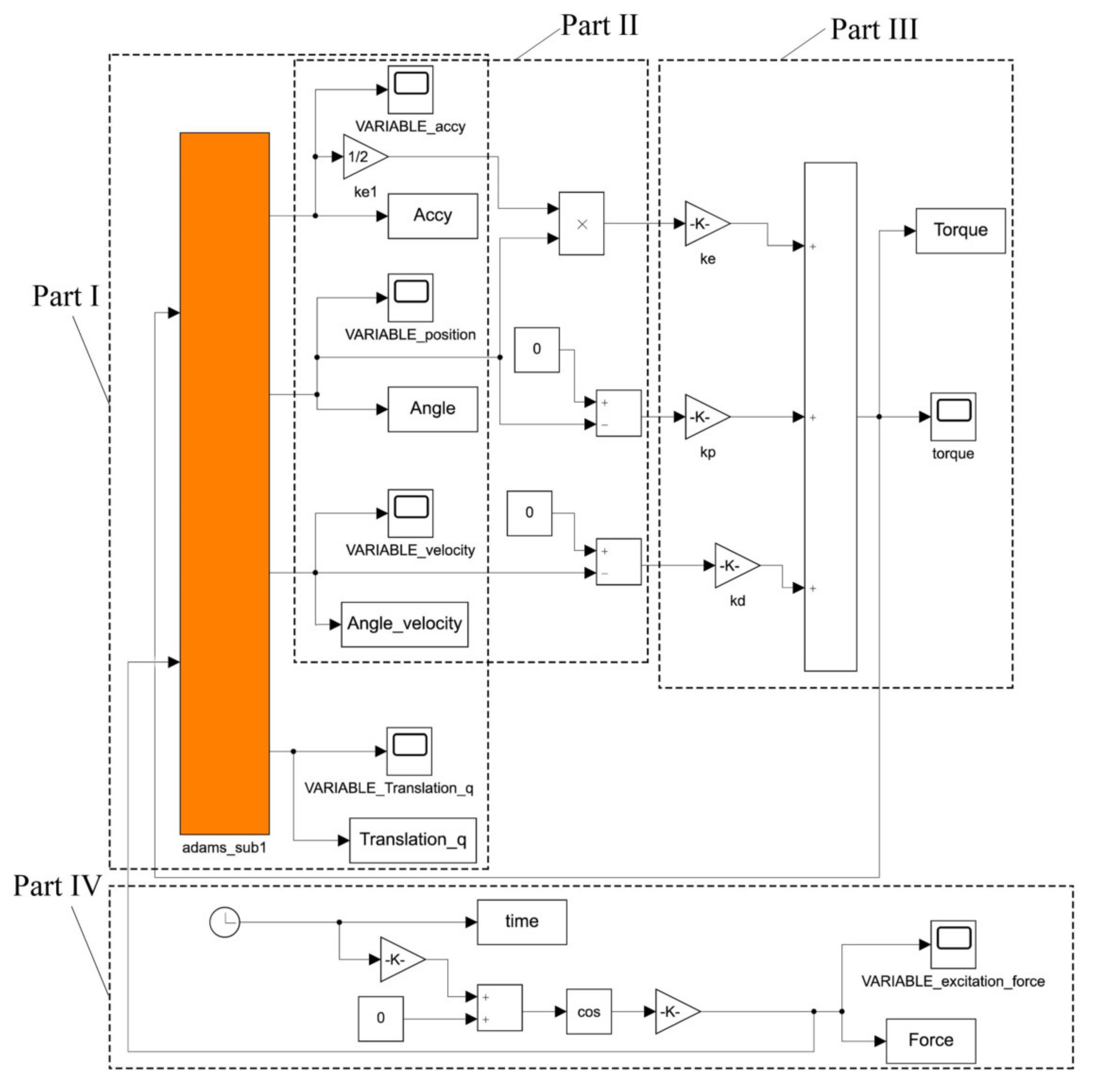
Inspired by the working principle of the saturation, a new primary resonance control scheme is put forward, as shown in
Figure 2. A saturation-based vibration absorber is designed and mounted at the flexible manipulator to suppress the primary resonance. For the purpose of establishing an energy exchange channel for the saturation, 1:2 internal resonance is constructed between the mode of the vibration absorber and the controlled mode of the flexible manipulator. Moreover, a novel idea of modal coupling enhancement is proposed to improve saturation control performance by strengthening coupling relationship between the mode of the vibration absorber and the controlled mode of the flexible manipulator.
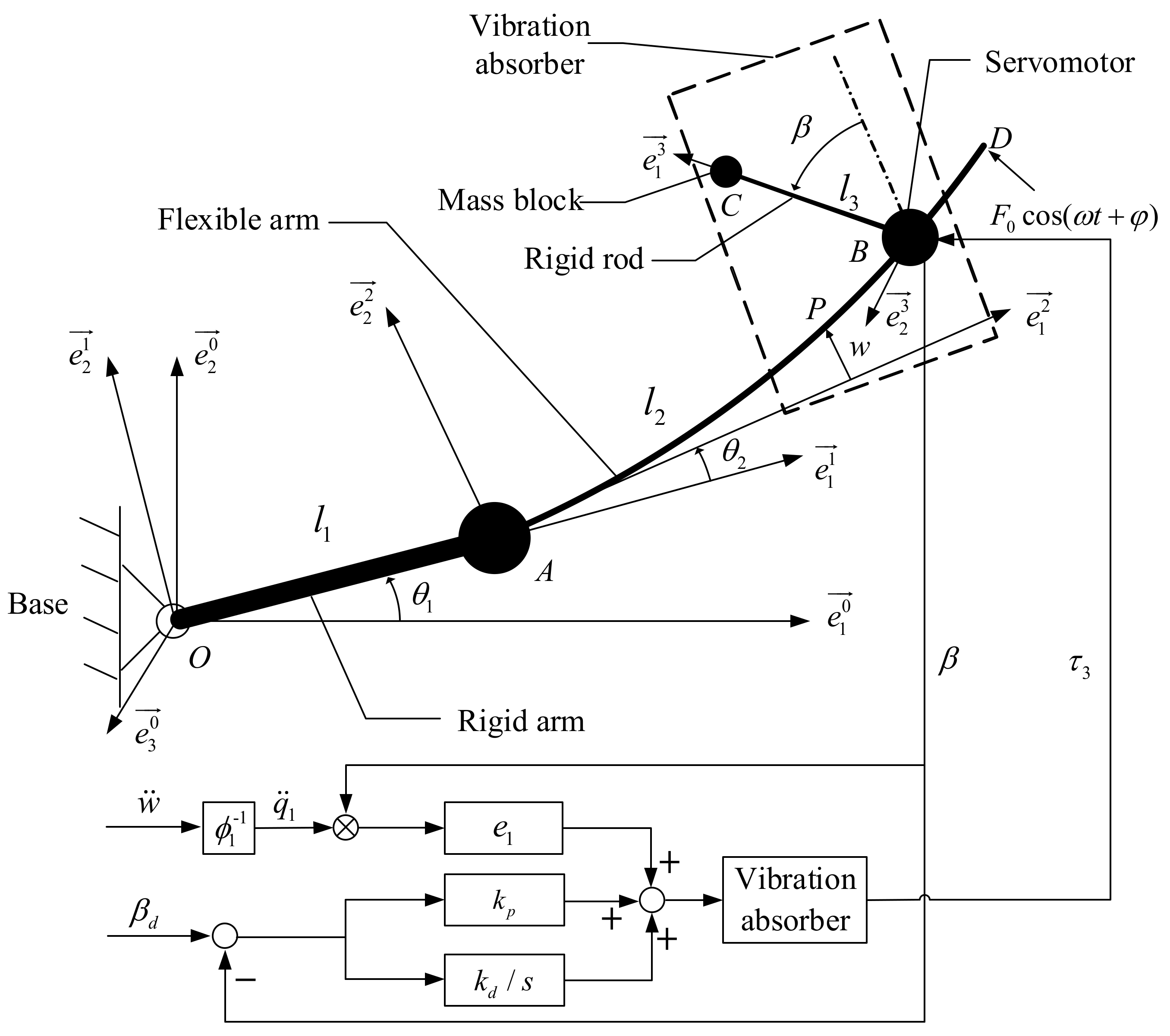
As shown in
Figure 3, the suggested vibration absorber is mounted at point
of the flexible manipulator, where
is its moving coordinate system. The vibration absorber is composed of a rigid rod, a mass block, and a servomotor. The rigid rod is installed on the output shaft of the servomotor, whose angular displacement is denoted by
. The mass block is fixed at the end of the rigid rod to provide additional inertia. The servomotor plays an important role in the vibration absorber, whose control model is designed to establish the saturation by constructing 1:2 internal resonance and enhancing modal coupling.
To construct 1:2 internal resonance, the control torque signal
of the servomotor is designed as
where
and
denote the desired angular displacement and the desired angular velocity of the rigid rod, respectively;
and
denote the position feedback gain coefficient and the speed feedback gain coefficient, respectively.
In order to work as a torsional vibration system, both
and
are designated as zero. Therefore, Equation (3) becomes
Through adjusting and , both the frequency and the damping of the vibration absorber are controlled to satisfy the requirement for establishing the saturation under 1:2 internal resonance.
Furthermore, for enhancing the modal coupling relationship between the vibration absorber and the flexible manipulator, a new nonlinear coupling term is constructed and introduced into the control torque signal
, i.e.,
where
denotes the coupling gain coefficient used to adjust coupling strength, and
denotes the controlled modal coordinate acceleration of the flexible manipulator.
4. Dynamic Equations of Flexible Manipulator with Saturation-Based Vibration Absorber
In this study,
and
are predefined and implemented by joint servomotors. Therefore, the controlled mode coordinate
of the flexible manipulator and the angular displacement
of the vibration absorber are considered as the generalized coordinates. Using Kane’s method [
3] and the Taylor expansion, the dynamic equations of the flexible manipulator with the suggested saturation-based vibration absorber are derived:
where
;
;
;
;
;
;
;
;
;
;
;
;
;
;
;
is the natural damping of the flexible arm;
,
and
denote the frequencies of the flexible arm, the vibration absorber, and the external excitation, respectively;
,
, and
denote the lengths of the rigid arm, flexible arm, and rigid rod, respectively;
and
denote the masses of the joint
and mass block, respectively;
is the mass per length of the flexible arm;
denotes the distance between
and
in the direction of
in the
;
and
are obtained when point
and point
are separately substituted into the controlled mode shape function
; and
is the flexural rigidity of the flexible arm.
Equation (6) describes the forced vibration of the flexible manipulator, indicated by the controlled mode coordinate and the external excitation . If the external excitation frequency falls into the neighborhood of the controlled modal frequency of the flexible manipulator, the primary resonance will occur and lead to a sharp increase in amplitude of the flexible manipulator. Because there is nonlinear coupling between and , the vibration absorber can be used to suppress the primary resonance of the flexible manipulator. However, it should be noted that there is nonlinear coupling between flexible motion (indicated by ) and rigid motion (indicated by and ). Therefore, in the case of complex rigid–flexible motion coupling, whether the saturation can be established and utilized to suppress the primary resonance should be investigated.
Equation (7) describes the torsional vibration of the vibration absorber, indicated by the angular displacement of the vibration absorber. In Equation (7), the frequency of the vibration absorber can be adjusted by the position feedback gain coefficient . This feature will be used to establish the internal resonance between the flexible manipulator and the vibration absorber. Similarly, the damping of the vibration absorber can be adjusted by the speed feedback gain coefficient . This feature will be used to control the primary resonance of the flexible manipulator. In addition, will be used to adjust coupling strength between the mode of the vibration absorber and the controlled mode of the flexible manipulator for improving saturation control performance.
5. Internal Resonance Analysis
Because the saturation depends on the internal resonance, this section investigates the establishment of the internal resonance. For convenience of internal resonance analysis, the dimensionless parameters and scaling factor
are introduced into Equations (6) and (7) (See
Appendix A). After omitting the higher-order terms containing
, Equations (6) and (7) become
where (˙) and (¨) denote the first-order and second-order derivatives concerning the dimensionless time
.
To seek the first-order approximate solutions of Equations (8) and (9), applying method of multiple scales [
10] (see
Appendix B) and separating the equations for each order of
up to one yield:
The expressions
and
in Equations (10) and (11) are linear in
, so the solutions of Equations (10) and (11) are expressed as
where
and
are complex functions of
, respectively;
and
are the conjugate of
and
, respectively; and all of them are determined by the conditions of eliminating secular terms.
Substituting Equations (14) and (15) into Equations (12) and (13) can obtain solutions as follows:
where
denotes the complex conjugate of the preceding term, and
denotes secular term,
,
In order to obtain the solutions of Equations (16) and (17), the solvability conditions are determined. Due to the primary resonance, the external excitation frequency is equal to the controlled modal frequency of the flexible manipulator, i.e.,
. In addition, 1:2 internal resonance condition is analyzed, because there are second-order nonlinear terms in Equations (8) and (9). Therefore, the detuning parameters
and
are introduced, i.e.,
Substituting Equation (20) into Equations (16) and (17) extracts the factors of
and
, respectively. The solvability conditions can be obtained after eliminating the secular terms as follows:
For convenience,
and
in Equations (21) and (22) are rewritten in the form of polar coordinates as
where
and
denote the modal amplitudes of the flexible manipulator and the vibration absorber, respectively;
and
denote the phase angles;
,
,
, and
are the real functions of
.
Substituting Equation (23) into Equations (21) and (22), then separating the result into real and imaginary parts, the steady-state solutions are obtained as follows:
where
According to Equations (26)–(29), one obtains
Because the internal resonance is an internal channel used to exchange energy between the flexible manipulator and the vibration absorber, both the external excitation and the modal damping are not considered when analyzing the establishment of the internal resonance, i.e.,
,
, and
. In this case, dividing Equation (24) by Equation (25) obtains
where
The integral of Equation (32) is
where
is a constant of integration, which is proportional to the initial energy of the system;
and
represent the vibration energy of the flexible manipulator and the vibration absorber, respectively.
Substituting
and
into Equation (33), one obtains
If , and are negatively correlated, as shown in Equation (34). It indicates that the internal resonance has been successfully established and the vibration energy is exchanging between the controlled mode of the flexible manipulator and the mode of the vibration absorber.
To realize
,
in Equation (35) is solved and should satisfy the following condition:
Through the above analysis, the generation condition of the internal resonance has been obtained. Based on 1:2 internal resonance, the saturation will be researched in the
Section 6 for suppressing the primary resonance of the flexible manipulator.
6. Saturation Analysis
6.1. Steady-State Solutions of Primary Resonance
To reveal the saturation principle, the steady-state solutions of Equations (24) and (25), (30) and (31) need to be analyzed under the primary resonance and 1:2 internal resonance. Therefore, let the modal amplitude and the phase angle in Equations (24) and (25), (30) and (31) no longer change with time (i.e., , ).
Depending on whether the amplitude of the vibration absorber is zero, the steady-state solutions of ,, , and are divided into the following two cases: linear solutions and the nonlinear solutions.
Case 1 (linear solutions):
and
, i.e.,
Equations (37) and (38) show that the primary resonance amplitude of the flexible manipulator is linearly monotonically increasing with the amplitude of the external excitation, whereas the vibration absorber is not working. In this case, the saturation has not yet been established.
Case 2 (nonlinear solutions):
and
, i.e.,
Equations (41) and (42) show that the vibration absorber is working, and the primary resonance amplitude of the flexible manipulator is not affected by the amplitude of the external excitation. It means that the primary resonance amplitude of the flexible manipulator will no longer increase with external excitation but maintain a constant value ; the rest of primary resonance energy will be transferred to the vibration absorber. These conclusions demonstrate the occurrence of saturation. In addition, denotes the primary resonance amplitude of the flexible manipulator when the saturation occurs, and thus is called the saturation amplitude in this study. A smaller means more primary resonance energy has been transferred to the vibration absorber via the internal resonance. Therefore, is an important index evaluating saturation control performance.
It should be noted that the amplitude
of the vibration absorber in Equation (42) is not unique, and is determined by
and
. To ensure
has real solutions, two critical values of
are obtained by the following boundary conditions:
From Equation (49), the critical values of
are derived, i.e.,
where
.
Depending on or , the real solutions of associated with different external excitation are discussed as follows.
For
, if
, then
has one nonlinear solution:
For
, if
, then
has two nonlinear solutions:
For
, if
, then
has one nonlinear solution:
There are no solutions in other cases.
6.2. Saturation Principle
According to
Section 6.1, the steady-state solutions of the primary resonance consist of the linear solutions and nonlinear solutions. The former indicates that the saturation has not been established, and the latter indicates that the saturation has been established. Whether the saturation can be successfully established depends on the stability of these solutions. Therefore, the saturation principle is revealed in this section by way of stability analysis.
For this purpose, the determinant of the Jacobian matrix
(See
Appendix C for the process) is
where
For the linear solutions, the eigenvalues of
are obtained as follows:
The linear solutions are stable if the real parts of Equation (57) are negative. Thus, the stable condition of the linear solutions is
Equation (58) indicates that the linear solutions are stable if the primary resonance amplitude of the flexible manipulator is less than the saturation amplitude . In this case, the vibration absorber is not working, and the saturation is not established.
For the nonlinear solutions, the characteristic equation of the Jacobian matrix
is defined as
where
denotes the eigenvalue of
;
,
,
, and
denote the factors of the characteristic equation as shown in
Appendix D.
Based on the Routh–Hurwitz criterion [
27], the nonlinear solutions are stable under the following conditions:
In this case, the vibration absorber is working, and the saturation is established.
From Equations (A14)–(A17), it can be seen that the stability of the nonlinear solutions is affected by several important parameters, including , , , , , , and . Therefore, Equation (60) will be used to search a reasonable range of these parameters for establishing the saturation.
Above stability analyses on the steady-state solutions of the primary resonance have revealed the saturation principle. In the
Section 6.3, a numerical example will be used to verify the saturation principle.
6.3. Verification of Saturation Principle
In this section, an example is used to verify the saturation principle. The damping coefficient of the flexible manipulator is
;
is determined according to the internal resonance relationship (
);
and
are selected according to Equation (60). The other structural parameters of the flexible manipulator and the vibration absorber are listed in
Table 1.
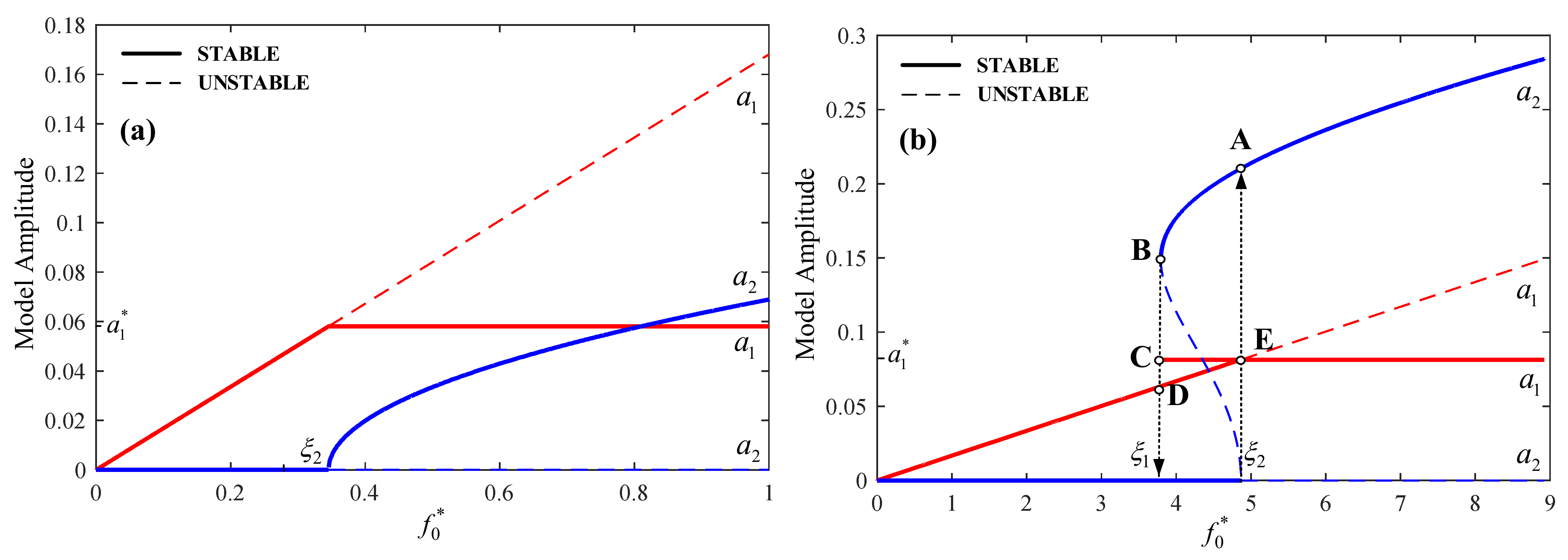
According to whether the primary resonance is ideally tuned, two cases are discussed. If both the internal resonance and the primary resonance are ideally tuned, i.e.,
and
, then
in Equation (47). As shown in
Figure 4a, with the increase of the external excitation amplitude
from zero, the controlled modal amplitude
of the flexible manipulator increases linearly, whereas the modal amplitude
of the vibration absorber remains at zero. This result agrees with the linear solution Equations (37) and (38) of the primary resonance. The input energy has excited the primary resonance of the flexible manipulator but has not been transferred to the vibration absorber. In this case, the saturation does not occur. However, if
, the modal amplitude
of the vibration absorber will increase, and the controlled modal amplitude
of the flexible manipulator will no longer increase and maintain a constant value (i.e., the saturation amplitude
). This is because the linear solutions given by Equations (37) and (38) become unstable, whereas the nonlinear solutions given by Equations (41) and (42) become stable. As
and
, Equation (42) becomes Equation (51). These results show that the saturation has been established, and the rest of primary resonance energy has been transferred to the vibration absorber.
If the internal resonance is ideally tuned and the primary resonance is not ideally tuned, such as
and
, then
in Equation (47). As shown in
Figure 4b, if
, with the increase of the external excitation amplitude
from zero, the controlled modal amplitude
of the flexible manipulator increases linearly, whereas the modal amplitude
of the vibration absorber remains at zero. This result agrees with the linear solution Equations (37) and (38) of the primary resonance. When
reaches
, however, the jump phenomena will arise. The value of
remains the constant value
, and
jumps from zero to A. Similarly, when
decreases to
,
jumps from C to D, and
jumps from B to zero. These phenomena agree with Equations (52) and (53). When
, the stable solution
is equal to
, which is independent of the amplitude
of the external excitation. It indicates that the saturation has been established. As a result,
at which the controlled modal amplitude of the flexible manipulator reaches saturation is called the external excitation threshold in this study. A smaller
means that the saturation is easier to establish. Therefore,
is an important index for evaluating saturation control performance.
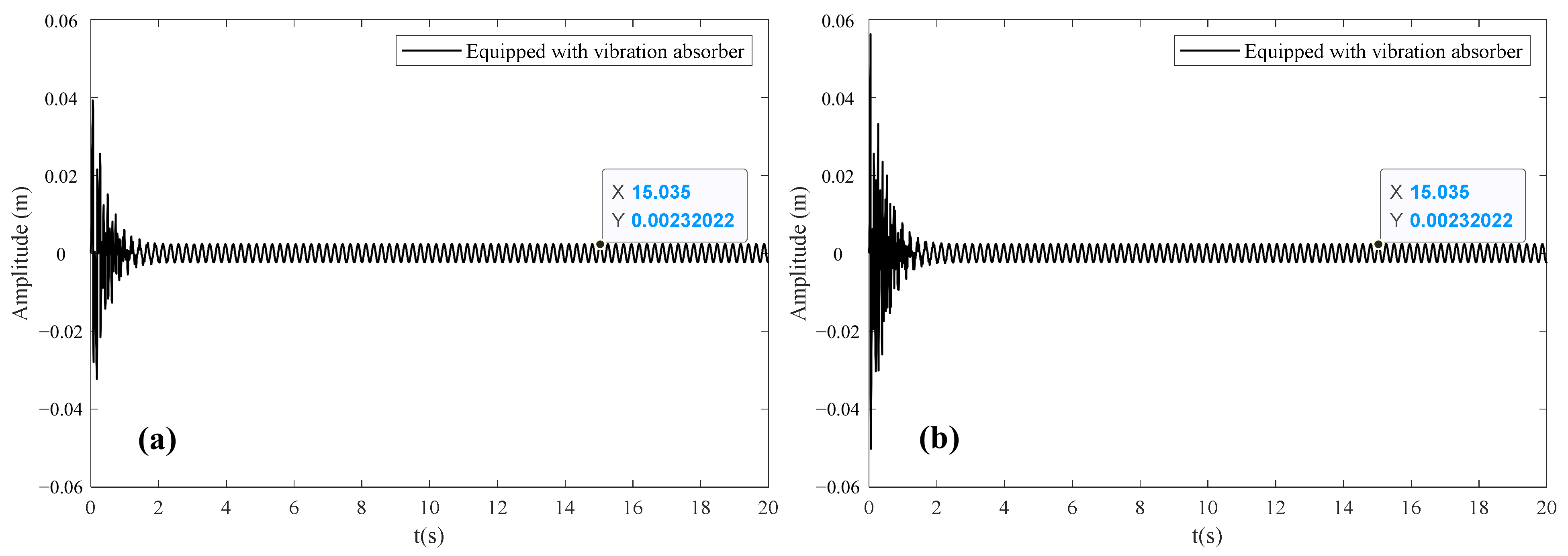
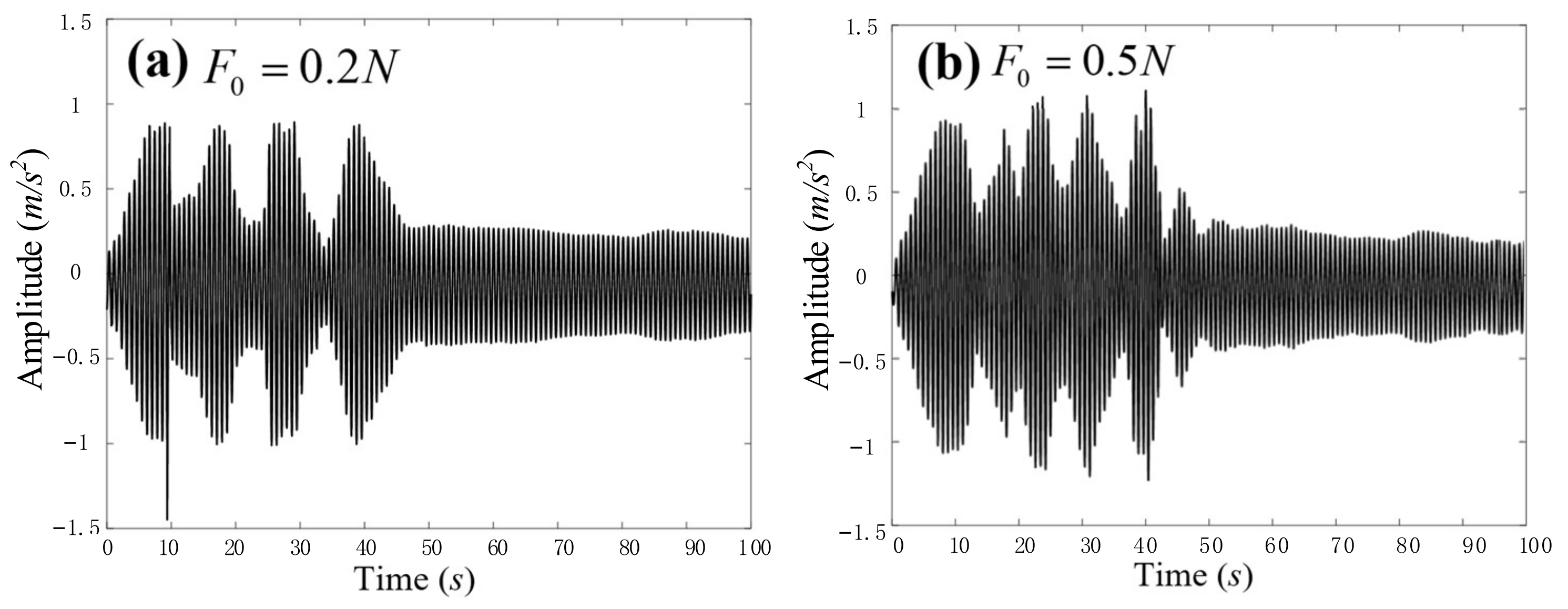
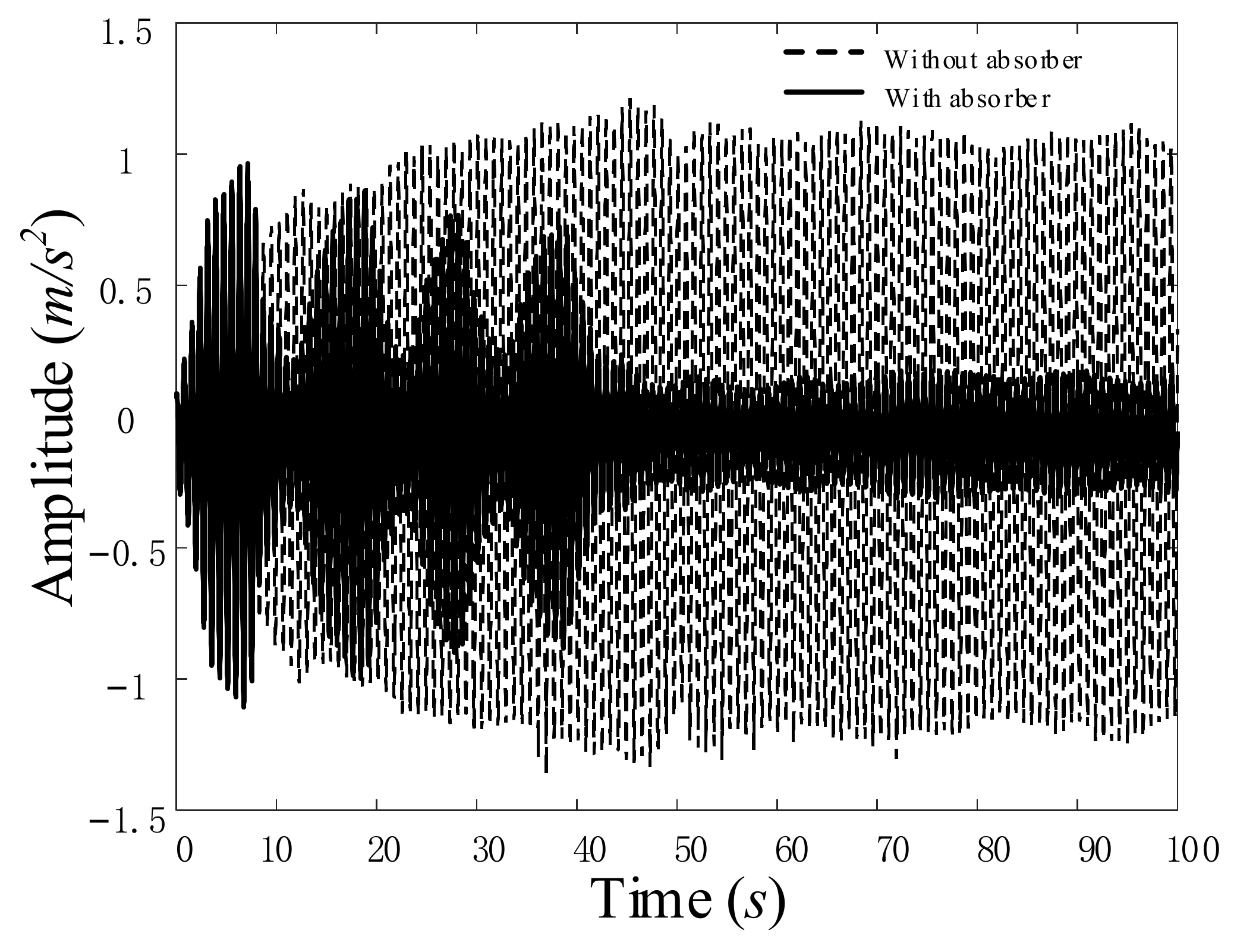
In order to further exhibit the saturation phenomenon, numerical simulations are conducted to show the saturation amplitudes of the flexible manipulator under external excitations amplitudes of
and
, respectively. As shown in
Figure 5, the steady saturation amplitudes of the flexible manipulator under different excitations no longer increase and remain
under saturation control. It indicates that saturation has been established and primary resonance amplitude has been effectively suppressed without increasing anymore.
In conclusion, with the increase of the external excitation amplitude from zero, the controlled modal amplitude of the flexible manipulator is excited and gradually increases, whereas the modal amplitude of the vibration absorber is not yet excited and remains at zero. When reaches , increases to the saturation amplitude . Subsequently, the linear solutions become unstable and the nonlinear solutions become stable. If , then the modal amplitude of the vibration absorber will increase, and the controlled modal amplitude of the flexible manipulator will no longer increase but maintain a constant value . It means that the saturation has been established, and the rest of primary resonance energy has been transferred to the vibration absorber.
6.4. Effectiveness Analysis of Saturation Control
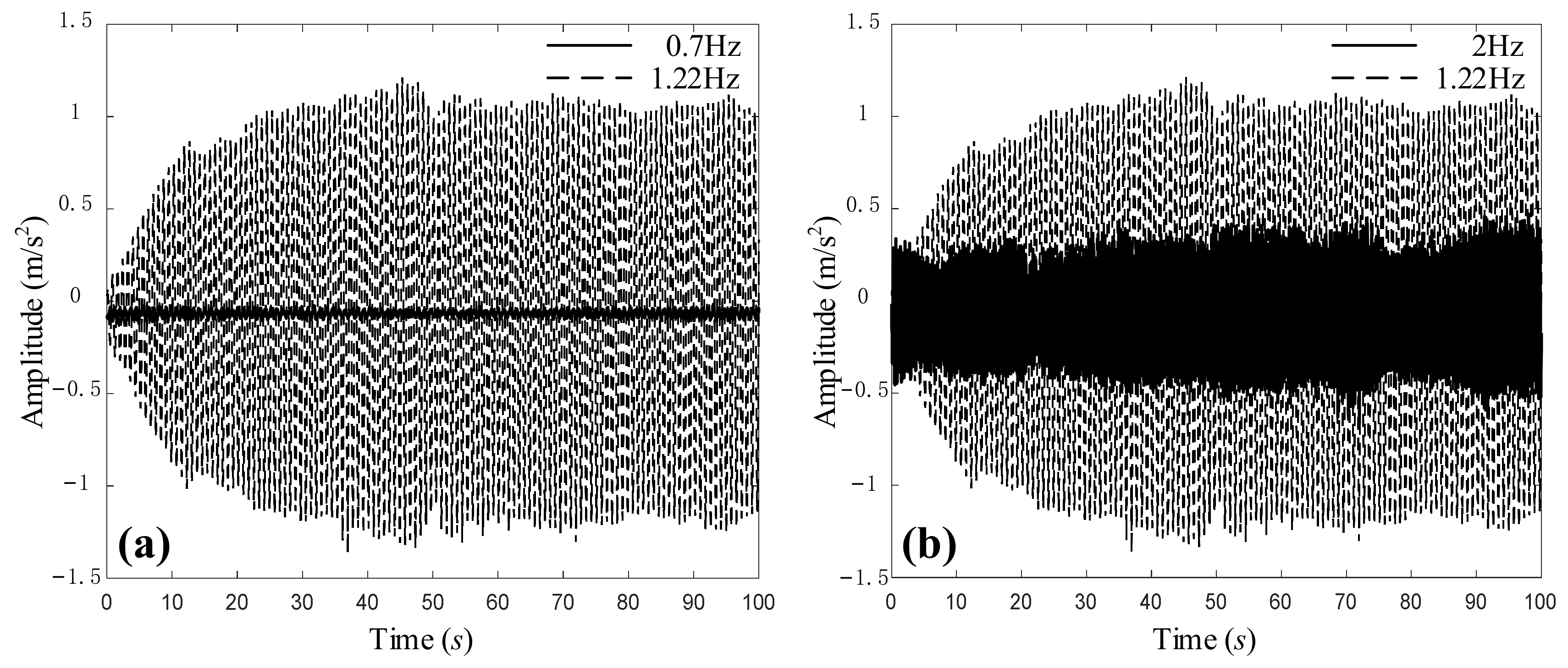
As stated above, the saturation depends on the establishment of the internal resonance. However, if the 1:2 internal resonance condition cannot be satisfied, indicated by the detuning parameter in Equation (20), whether the saturation can be established should be researched. In addition, if the external excitation frequency slightly differs from the controlled modal frequency of the flexible manipulator, indicated by the detuning parameter in Equation (20), whether the saturation can be established should be researched. For this purpose, the effect of and on saturation control is analyzed. Let , , , , , and .
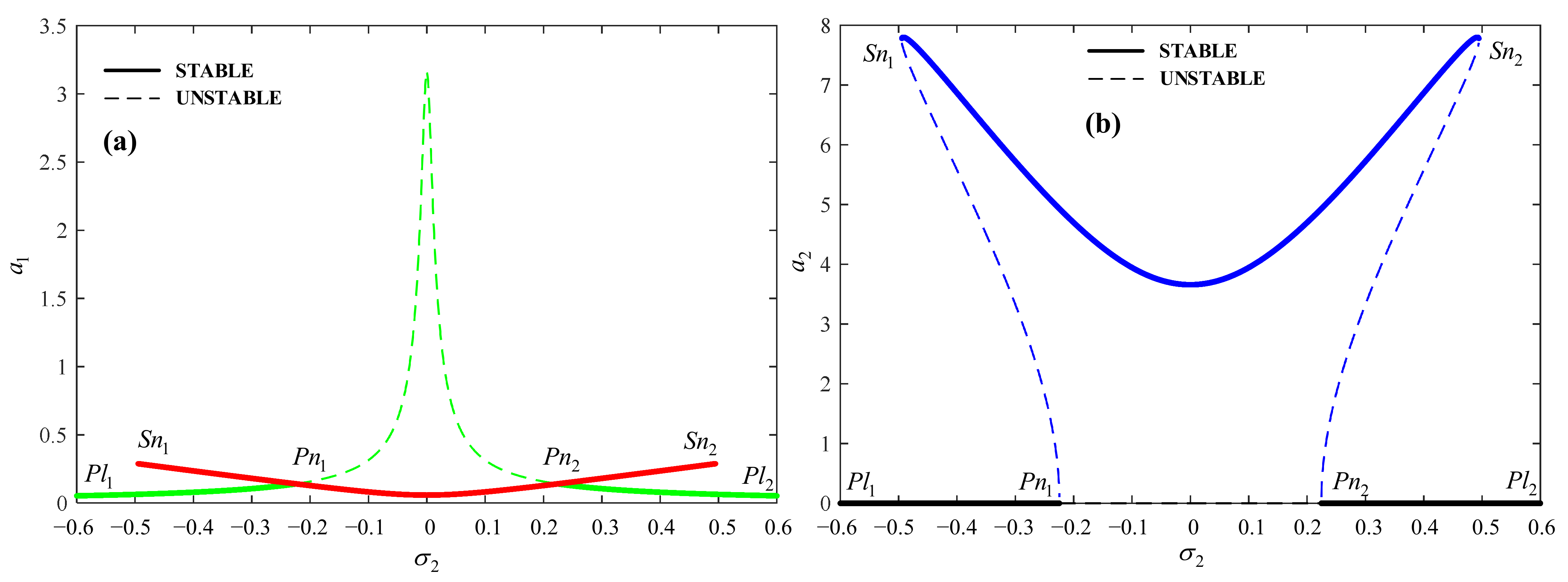
Case 1: 1:2 internal resonance condition is satisfied (i.e.,
) and the primary resonance is detuned (for example,
is in
). As shown in
Figure 6, the green and red lines represent the controlled modal amplitude
of the flexible manipulator when the vibration absorber is inactive and active, respectively; the black and blue lines represent the modal amplitude
of the vibration absorber in inactive and active state, respectively; and the solid and dotted lines represent the stable or unstable amplitude. When
, the nonlinear solutions are stable and the linear solutions are unstable. In this case, the primary resonance can be suppressed by the saturation. Therefore,
is called the saturation control bandwidth in this study. Obviously, increasing the saturation control bandwidth can improve the effectiveness of the suggested saturation control method. Therefore, the saturation control bandwidth is an important index evaluating saturation control performance.
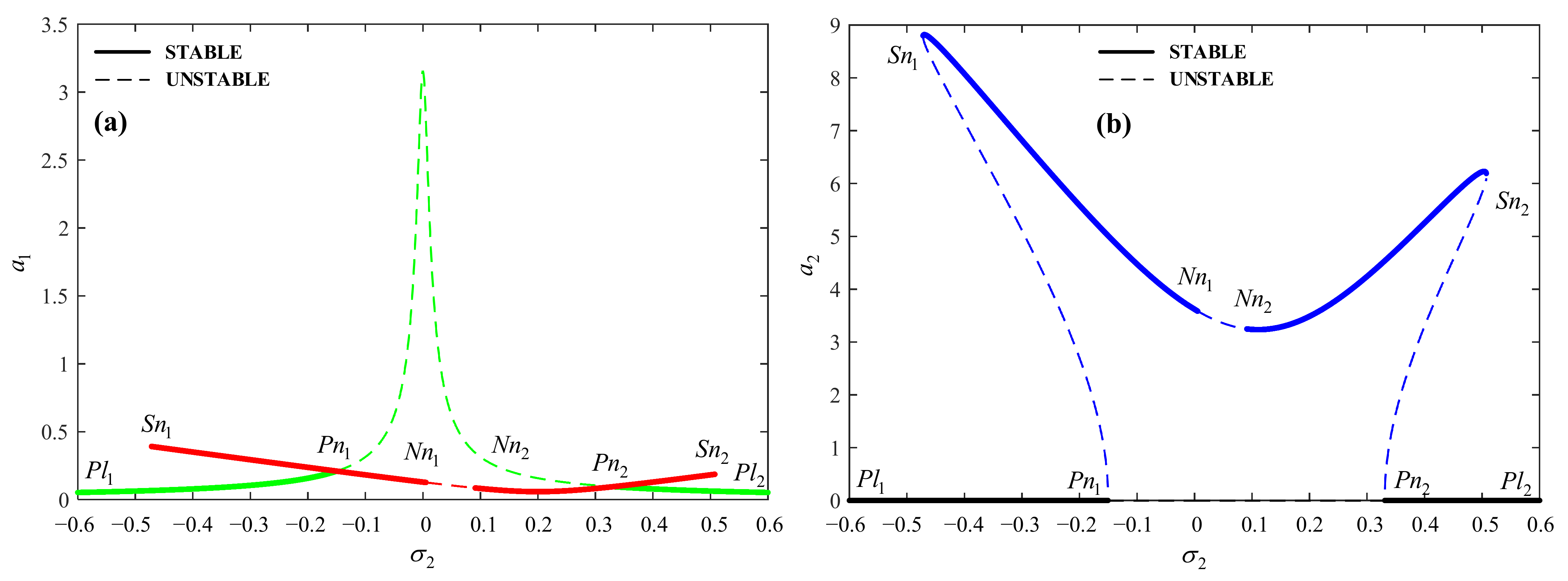
Case 2: 1:2 internal resonance condition is not satisfied (for example,
) and the primary resonance is detuned (for example,
is in
). As shown in
Figure 7, when
or
, the nonlinear solutions are stable and the linear solutions are unstable. In this case, the primary resonance can be suppressed by the saturation. However,
is an unstable region, within which both the nonlinear solutions and the linear solutions are unstable. In this case, the saturation cannot be successfully established.
In conclusion, when 1:2 internal resonance condition is not satisfied, the saturation may not be successfully established in some cases. Therefore, the frequency of the suggested vibration absorber is designed to be adjustable to satisfy the requirement for establishing 1:2 internal resonance.
7. Configuration of Saturation Vibration Absorber
According to the analysis of
Section 6, saturation control performance is mainly determined by the saturation amplitude, the external excitation threshold, and the saturation control bandwidth. For the convenience of describing the influence of the vibration absorber configuration parameters on saturation control performance, the saturation amplitude, the external excitation threshold, and the saturation control bandwidth are simplified as follows:
where
denotes the dimensionless saturation amplitude,
denotes the dimensionless external excitation threshold, and
denotes the saturation control bandwidth.
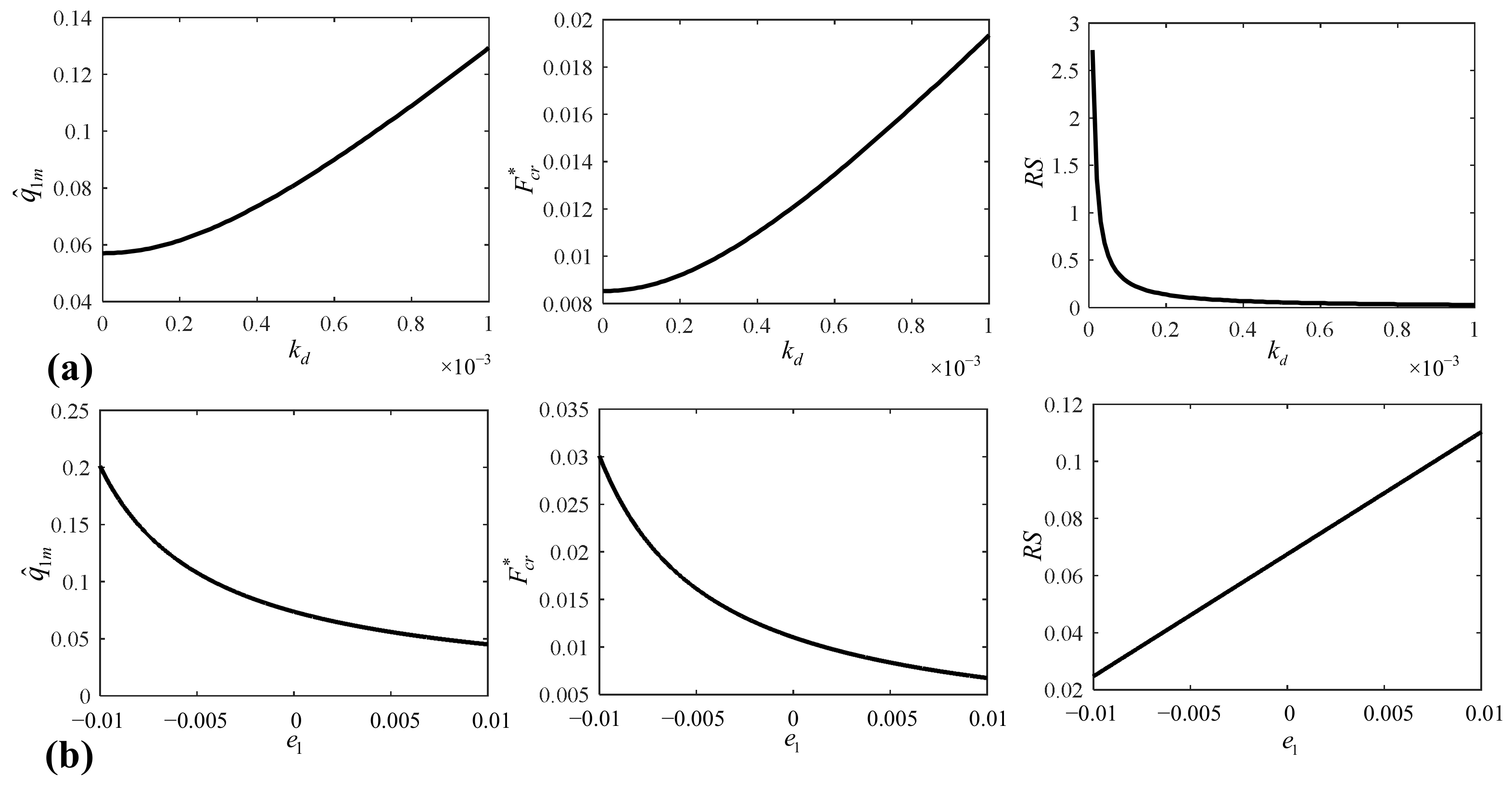
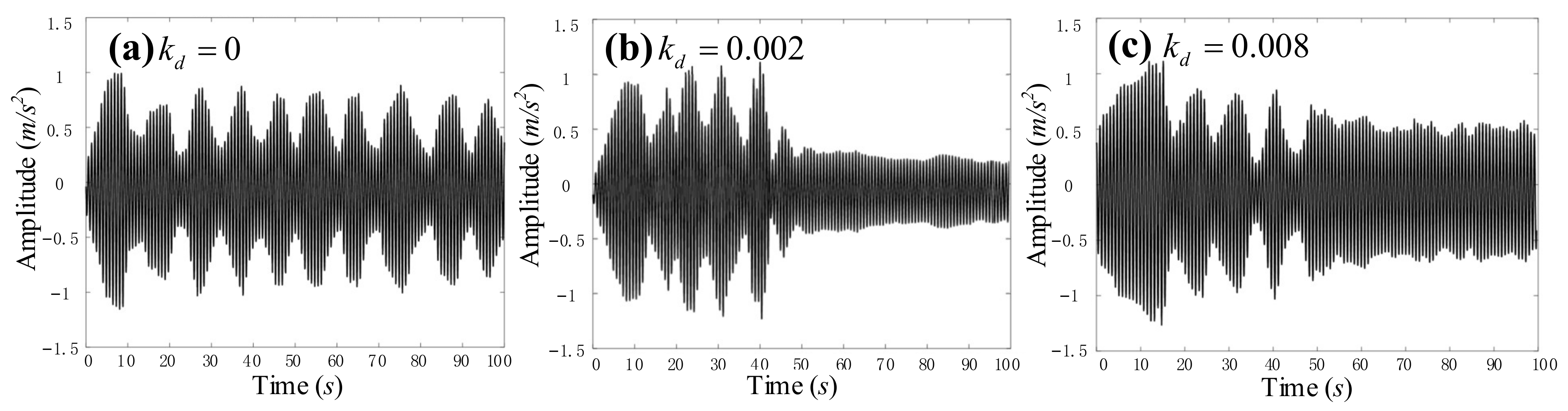
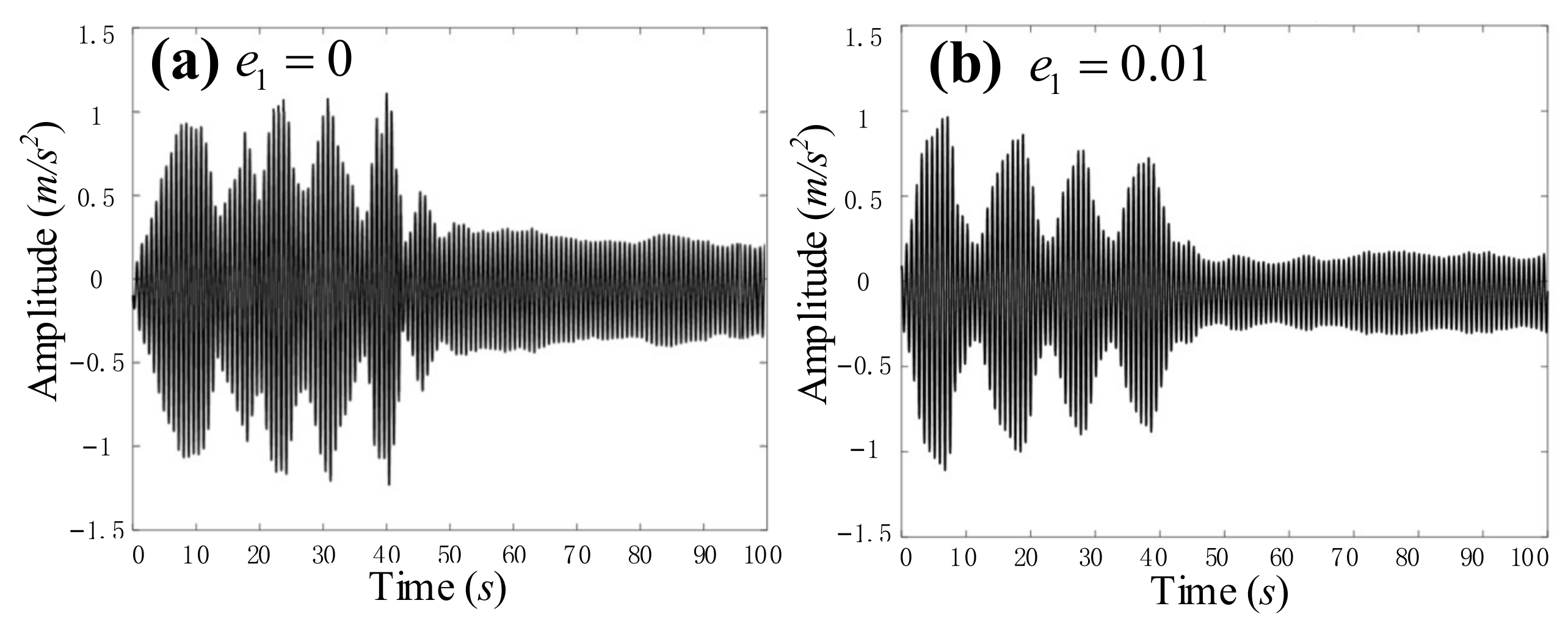
Obviously, smaller , smaller , and larger mean better saturation control performance. From Equations (61)–(63), it can be concluded that both the structural parameters (i.e., , , ) and the control parameters (i.e., , ) of the vibration absorber can affect these indexes. As the structural parameters are difficult to change, this section will discuss how to configure the speed feedback gain coefficient and the coupling gain coefficient of the vibration absorber to improve saturation control performance.
Let
,
,
, and
5 × 10
−4. As shown in
Figure 8a, when
, with the increase of
, both
and
increase, but
decreases. Therefore, decreasing
while satisfying the formula (60) can improve saturation control performance. As shown in
Figure 8b, when
, with the increase of
, both
and
decrease, but
increases. Therefore, increasing
while satisfying the Formula (60) can improve saturation control performance.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}