
Study on the Digital Hydraulic Driving System of the Belt Conveyor

Abstract
:1. Introduction
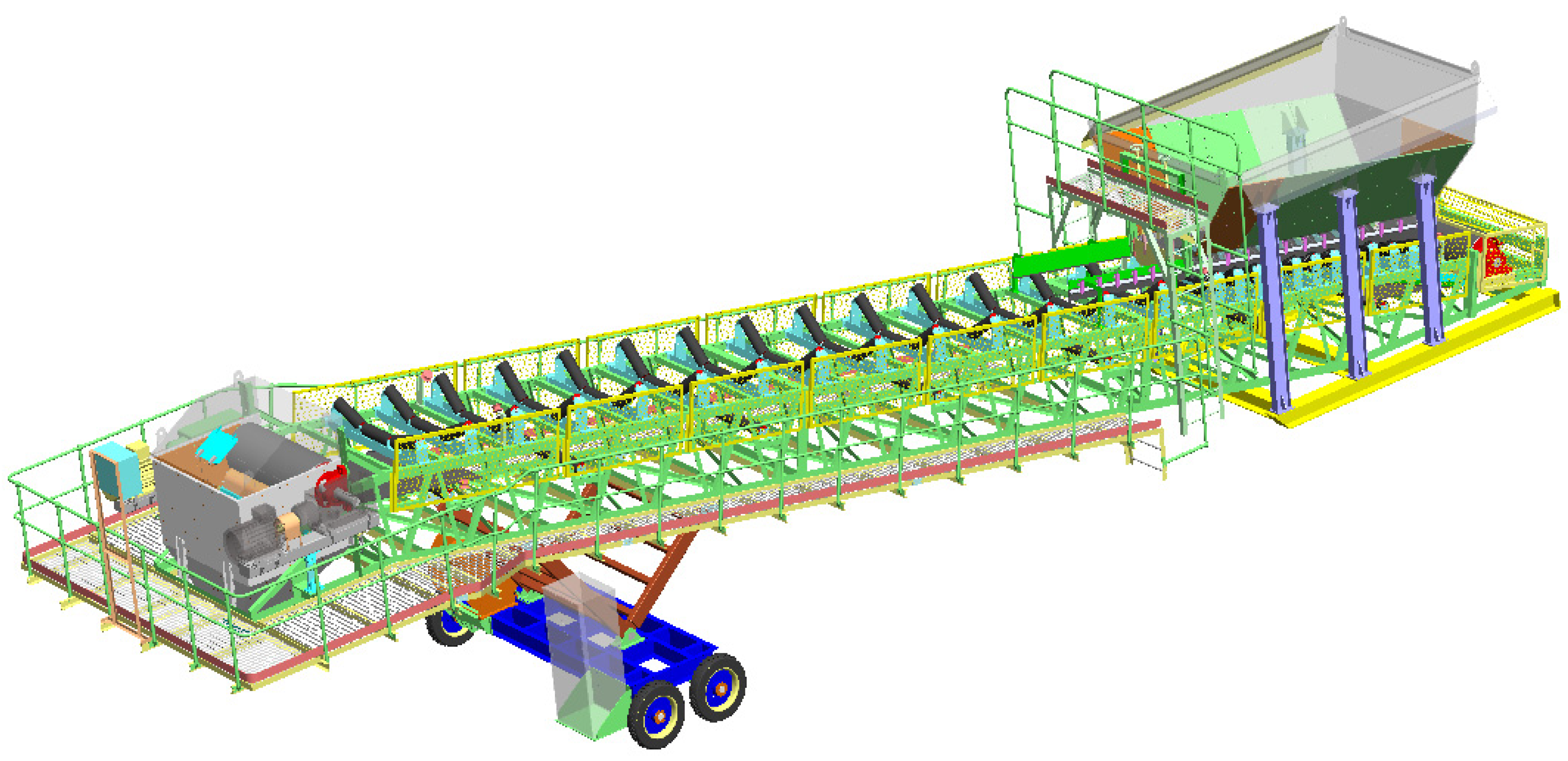
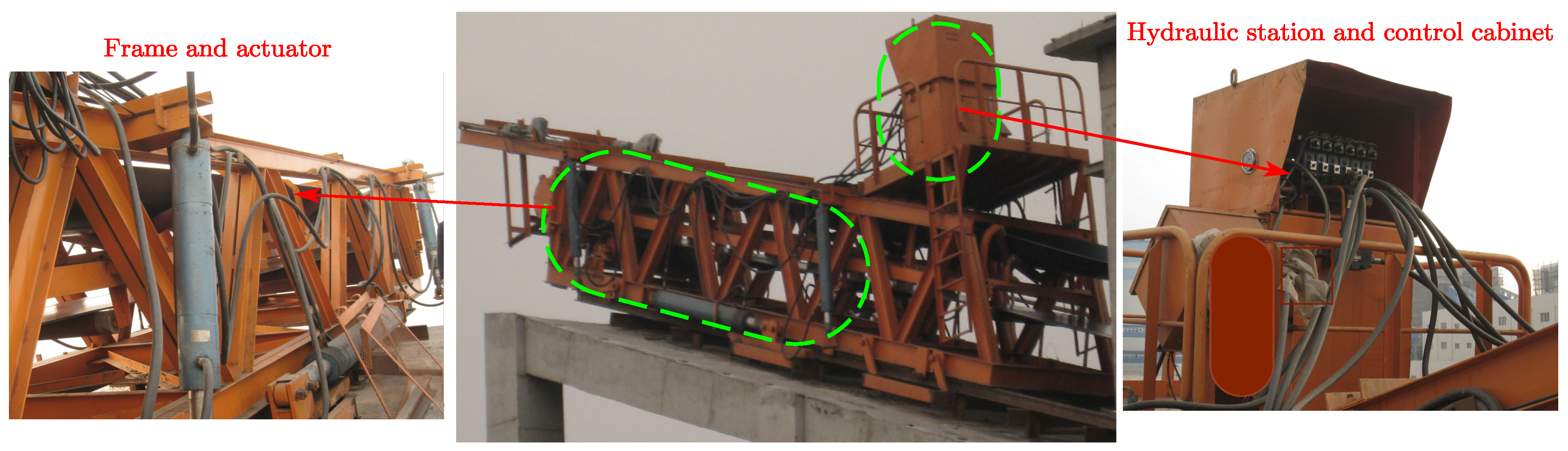
2. General Scheme Design
3. Analysis of Digital Hydraulic Driving Characteristics
3.1. Modeling and Simulation of Digital Valve
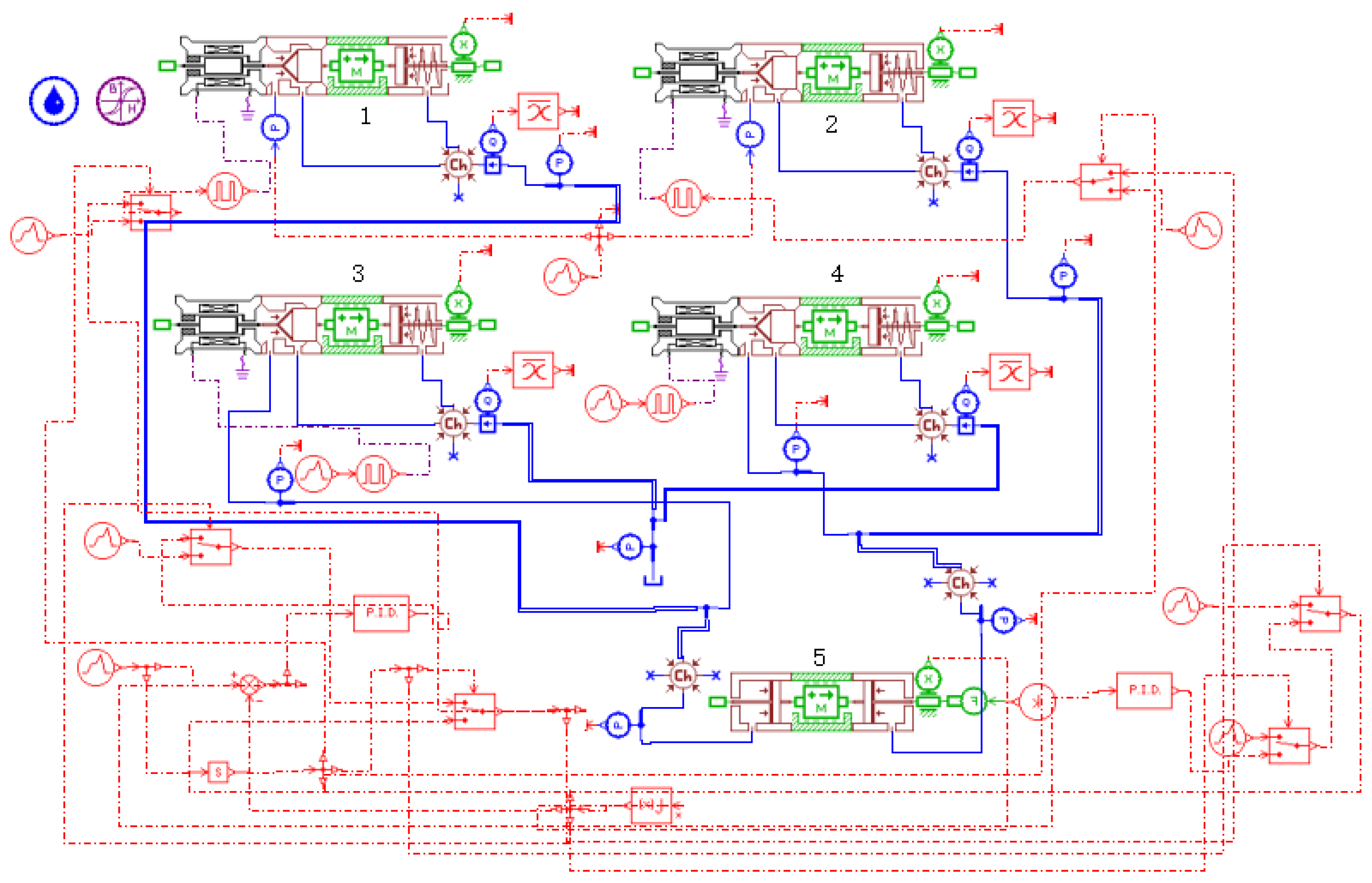
3.2. Simulation Research on Digital Hydraulic Propulsion System of the Belt Conveyor
4. Conclusions
- (1)
- It is feasible to replace the proportional and servo valves with a digital valve. A digital valve can realize closed-loop flow control. The frequency of the digital valve control signal has a great influence on the closed-loop control results. The smaller and larger control frequencies are not conducive to the flow control. In this paper, 200 Hz is selected as the control frequency.
- (2)
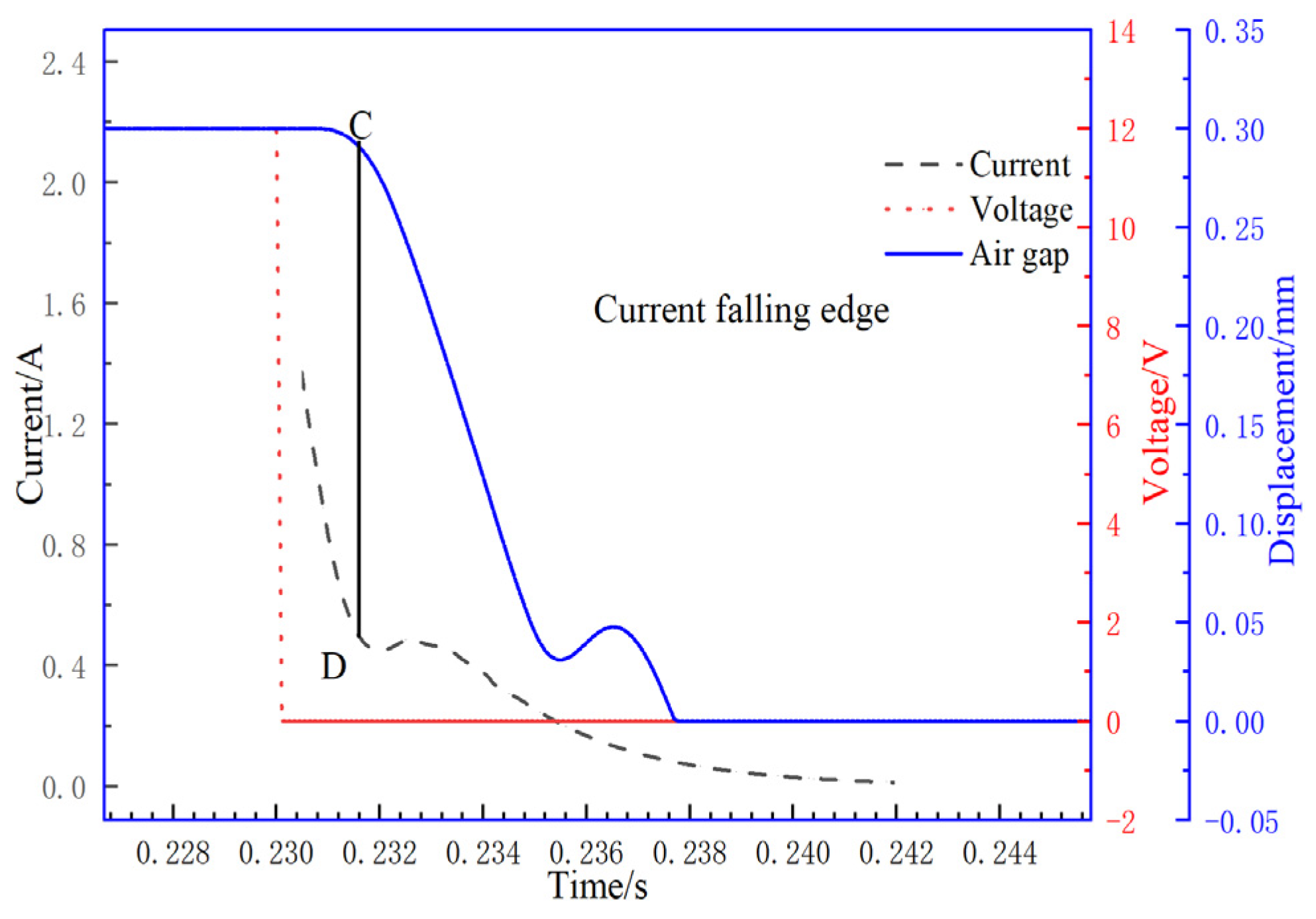
- The dynamic working process of the digital valve is a fast opening and closing process. The current and spool displacement change rapidly and dynamically with the change of the voltage control signal.
- (3)
- The results of the displacement tracking research show that it can achieve effective displacement control. In the initial stages, the digital valve is adjusted quickly. After a short adjustment process, the displacement tracking effect is good. After that, because of the dynamic switch of the digital valve, the displacement is adjusted dynamically with the target displacement.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhong, W.L.; Ying, J.D. The Design of the Giant Die Forging Hydraulic Press Synchronous Control System and its Dynamic Simulation. Appl. Mech. Mat. 2012, 1923, 836–841. [Google Scholar]
- Yan, L.D.; Zhan, S.Q. A Research on Dual Hydraulic Motor Synchronizing Driving System with Pressure Coupling. Appl. Mech. Mat. 2015, 3867, 175–181. [Google Scholar]
- Dong, S.; Shao, X.Y.; Feng, G. A Model-Free Cross-Coupled Control for Position Synchronization of Multi-Axis Motions: Theory and Experiments. IEEE Trans. Control Syst. Technol. 2007, 15, 306–314. [Google Scholar]
- Guo, H.Z. Bang-Bang Control of the Multi-Cylinder Synchronization Hydraulic System of Pusher. Adv. Mat. Res. 2014, 2880, 33–40. [Google Scholar]
- Lu, R.; James, K.; Mills Dong, S. Adaptive Synchronized Control for a Planar Parallel Manipulator: Theory and Experiments. J. Dyn. Syst. Meas. Control 2006, 128, 976–979. [Google Scholar]
- Zhou, D.; Shen, T.L.; Tamura, K. Adaptive Nonlinear Synchronization Control of Twin-Gyro Precession. J. Dyn. Syst. Meas. Control 2006, 128, 592–599. [Google Scholar] [CrossRef]
- Jarczyk, J.C.; Alt, B.; Blath, J.P.; Svaricek, F.; Schultalbers, M. Decoupling control for the speed synchronization task in the powertrain of a hybrid electric vehicle. In Proceedings of the IEEE International Conference on Control and Automation, Christchurch, New Zealand, 9–11 December 2009. [Google Scholar]
- Guo, Y.; Fang, K.; Zhou, H. Design of Fuzzy Feed-forward Decoupling System based on FPGA. In Proceedings of the 2008 International Conference on Embedded Software and Systems, Chengdu, China, 29–31 July 2008. [Google Scholar]
- Xu, J.; Hang, C.; Liu, C. Parallel structure and tuning of a fuzzy PID controller. Automatica 2000, 36, 673–684. [Google Scholar] [CrossRef]
- Jurdiang, Z.; Li, L. Synchronization Motion Control for Electro-hydraulic System of Tensioner for Pipelaying Vessel. In Proceedings of the 2009 Fifth International Conference on Natural Computation, Tianjian, China, 14–16 August 2009. [Google Scholar]
- Chen, C.; Liu, L.; Cheng, C.; Chiu, G.T.C. Fuzzy controller design for synchronous motion in a dual-cylinder electro-hydraulic system. Control Eng. Pract. 2008, 16, 658–673. [Google Scholar] [CrossRef]
- Li, K.; Marman, M.A.; Xu, M.; Xiao, Z. Electro-hydraulic proportional control of twin-cylinder hydraulic elevators. Control Eng. Pract. 2001, 9, 367–373. [Google Scholar] [CrossRef]
- Sun, H.; Chiu, G. Motion synchronization for multi-cylinder electro-hydraulic system. IEEE/ASME Trans. Mechatron. 2001, 7, 171–181. [Google Scholar]
- Sun, H.; Chiu, G. Equalization of multi-cylinder electrohydraulic systems. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000. [Google Scholar]
- Pasolli, P.; Ruderman, M. Hybrid State Feedback Position-Force Control of Hydraulic Cylinder. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Ilmenau, Germany, 18–20 March 2019. [Google Scholar]
- Gradl, C.; Plockinger, A.; Scheidl, R. Sensorless position control with a hydraulic stepper drive—Concept, compression modeling and experimental investigation. Mechatronics 2016, 35, 91–101. [Google Scholar] [CrossRef]
- Koivumik, J.; Zhu, W.H.; Mattila, J. Addressing Closed-Chain Dynamics for High-Precision Control of Hydraulic Cylinder Actuated Manipulators. In Proceedings of the Bath/ASME Symposium on Fluid Power and Motion Control, Bath, UK, 12–14 September 2018; Available online: https://asmedigitalcollection.asme.org/FPST/proceedings-abstract/FPMC2018/51968/V001T01A018/271083 (accessed on 3 May 2022).
- Lasse, S.; Morten, G.; Henrik, C.; Andersen, T.O. Andersen Position Control of an Over-Actuated Direct Hydraulic Cylinder Drive. Control Eng. Pract. 2017, 64, 1–14. [Google Scholar]
- Shen, W.; Wang, J.H.; Huang, H.L.; He, J.Y. Fuzzy sliding mode control with state estimation for velocity control system of hydraulic cylinder using a new hydraulic transformer. Eur. J. Control 2019, 48, 104–114. [Google Scholar] [CrossRef]
- Pedersen, H.C.; Andersen, T.O. Pressure Feedback in Fluid Power Systems-Active Damping Explained and Exemplified. IEEE Trans. Control Syst. Technol. 2018, 26, 102–113. [Google Scholar] [CrossRef]
- Shen, W.; Mai, Y.F.; Su, X.Y.; Zhao, J.; Jiang, J. A new electric hydraulic actuator adopted the variable displacement pump. Asian J. Control 2016, 18, 178–191. [Google Scholar] [CrossRef]
- Yamada, H.; Wennmacher, G.; Muto, T.; Suematsu, Y. Development of a high-speed on/off digital valve for hydraulic control systems using a multilayered PZT actuator. Int. J. Fluid Pow. 2000, 2, 5–10. [Google Scholar] [CrossRef]
- Flor, M.; Scheller, S.; Heidenfelder, R. Digital hydraulics at bosch rexroth—A trend evolves to real applications. In Proceedings of the Fifth Workshop on Digital Fluid Power, Tampere, Finland, 24–25 October 2012. [Google Scholar]
- Foschum, P.; Plöckinger, A.; Scheidl, R. Hardware in the loop multi objective genetic optimization for efficient valve control. In Proceedings of the Fifth Workshop on Digital Fluid Power, Tampere, Finland, 24–25 October 2012. [Google Scholar]
- Zhang, J.H.; Yang, M.S.; Xu, B.; Ding, R.; Cheng, M.; Dong, P. A novel intelligent sliding sleeve for shale oil and gas mining equipment. J. Pet. Sci. Eng. 2017, 158, 1–10. [Google Scholar] [CrossRef]
- Zhang, J.H.; Yang, M.S.; Xu, B. Design and Experimental Research of a Miniature Digital Hydraulic Valve. Micromachines 2018, 9, 283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, M.S.; Zhang, J.H.; Xu, B.; Wang, W. Study on electromagnetic force of the new micro digital valve. Microsyst. Technol. 2019, 25, 2399–2409. [Google Scholar] [CrossRef]
- Yang, M.S.; Zhang, J.H.; Xu, B. Experimental Study and Simulation Analysis on Electromagnetic Characteristics and Dynamic Response of a New Miniature Digital Valve. Adv. Mat. Sci. Eng. 2018, 2018, 2378576. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Model | Model Name | Parameter | Value |
|---|---|---|---|
 | Electromechanical transducer | Voltage (V) | 12 |
| Coil diameter (mm) | 0.18 | ||
| Coil turn | 400 | ||
| Coil resistance (Ω) | 5.2 | ||
| Air gap (mm) | 0.3 | ||
 | Pulse signal | Frequency (Hz) | 10~200 |
 | Mass | Higher displacement limit (mm) | 0.3 |
| Lower displacement limit (mm) | 0 | ||
| Weight (kg) | 0.02 | ||
 | Poppet with sharp edge seat | Diameter of poppet (mm) | 5 |
| Diameter of hole (mm) | 1.5 | ||
| Poppet half angle (degree) | 37.5 | ||
| Maximum flow coefficient | 0.7 | ||
 | Piston with spring | Piston diameter (mm) | 5 |
| Rod diameter (mm) | 1 | ||
| Spring force at zero (N) | 8 | ||
| Spring stiffness (N/mm) | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M. Study on the Digital Hydraulic Driving System of the Belt Conveyor. Machines 2022, 10, 417. https://doi.org/10.3390/machines10060417
Yang M. Study on the Digital Hydraulic Driving System of the Belt Conveyor. Machines. 2022; 10(6):417. https://doi.org/10.3390/machines10060417
Chicago/Turabian StyleYang, Meisheng. 2022. "Study on the Digital Hydraulic Driving System of the Belt Conveyor" Machines 10, no. 6: 417. https://doi.org/10.3390/machines10060417
APA StyleYang, M. (2022). Study on the Digital Hydraulic Driving System of the Belt Conveyor. Machines, 10(6), 417. https://doi.org/10.3390/machines10060417