
Kinematic and Dynamic Modeling and Workspace Analysis of a Suspended Cable-Driven Parallel Robot for Schönflies Motions




Abstract
:1. Introduction
- The structure of the novel CDPR which generates Schönflies motions is introduced to complement the field of lower-mobility CDPRs.
- The closed-form solutions for the inverse and forward kinematics of the robot are derived based on a geometrical approach.
- The dynamic model of the robot is formulated based on the virtual power principle, which lays the foundation for the workspace determination and the model-based control of the robot.
- The dynamic feasible workspace of the robot is determined under different values of accelerations, which facilitates the motion planning and control of the robot.
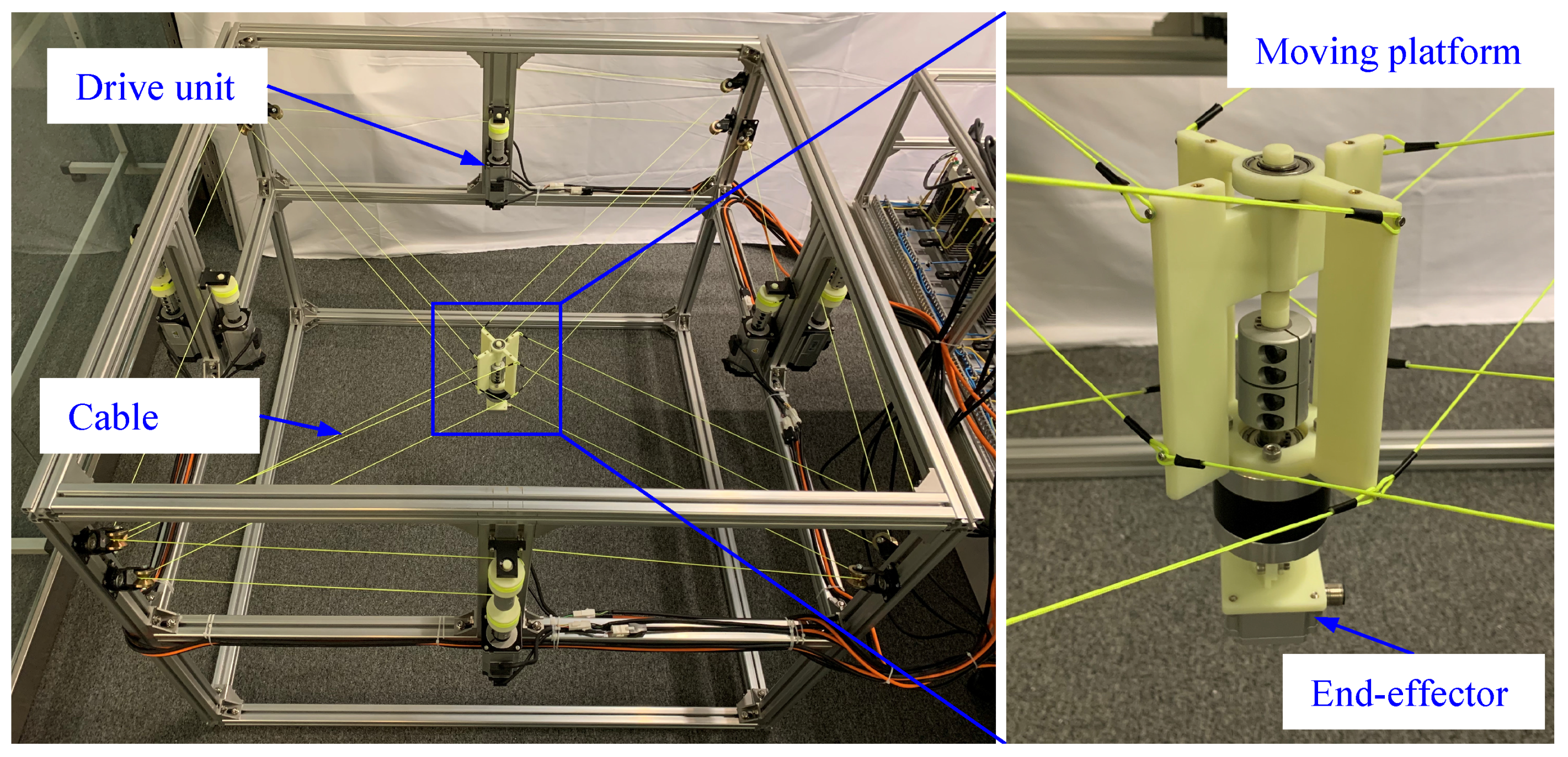
2. Architecture Description
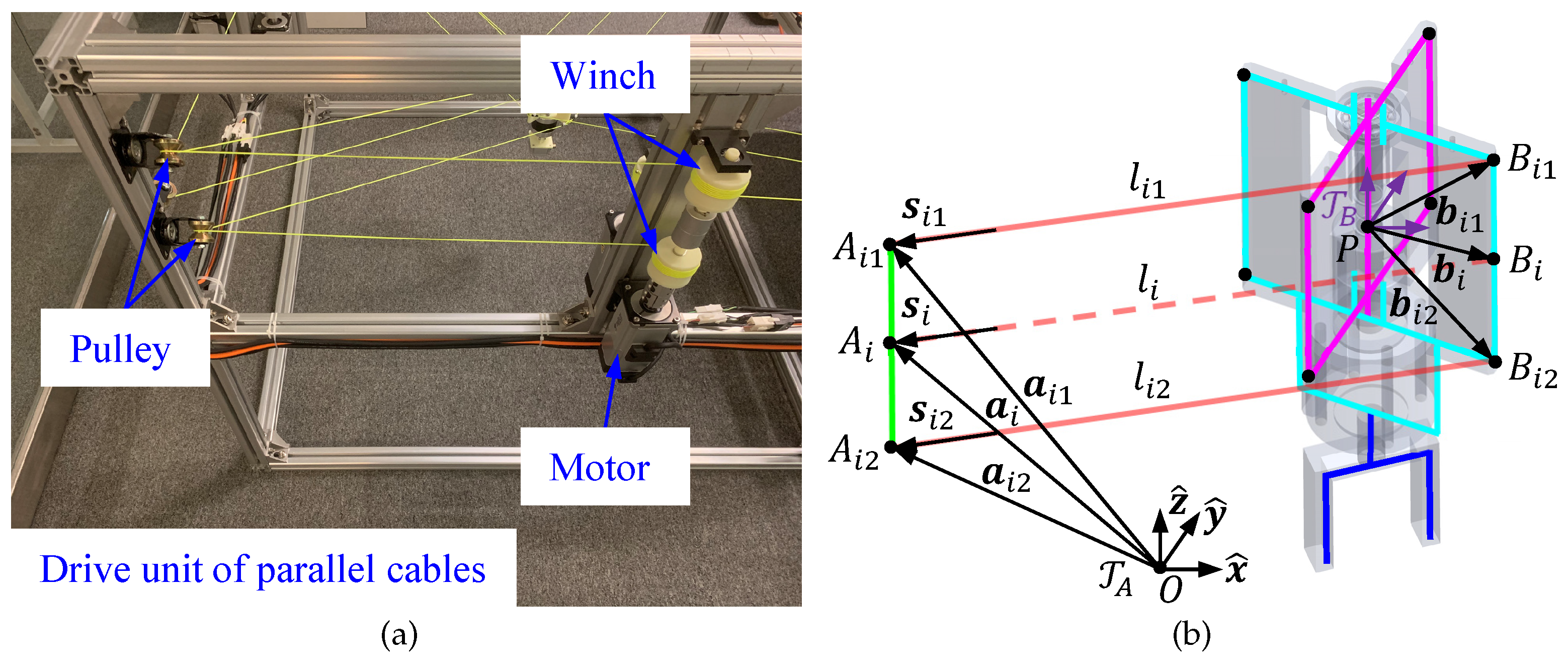
2.1. Cable Arrangement
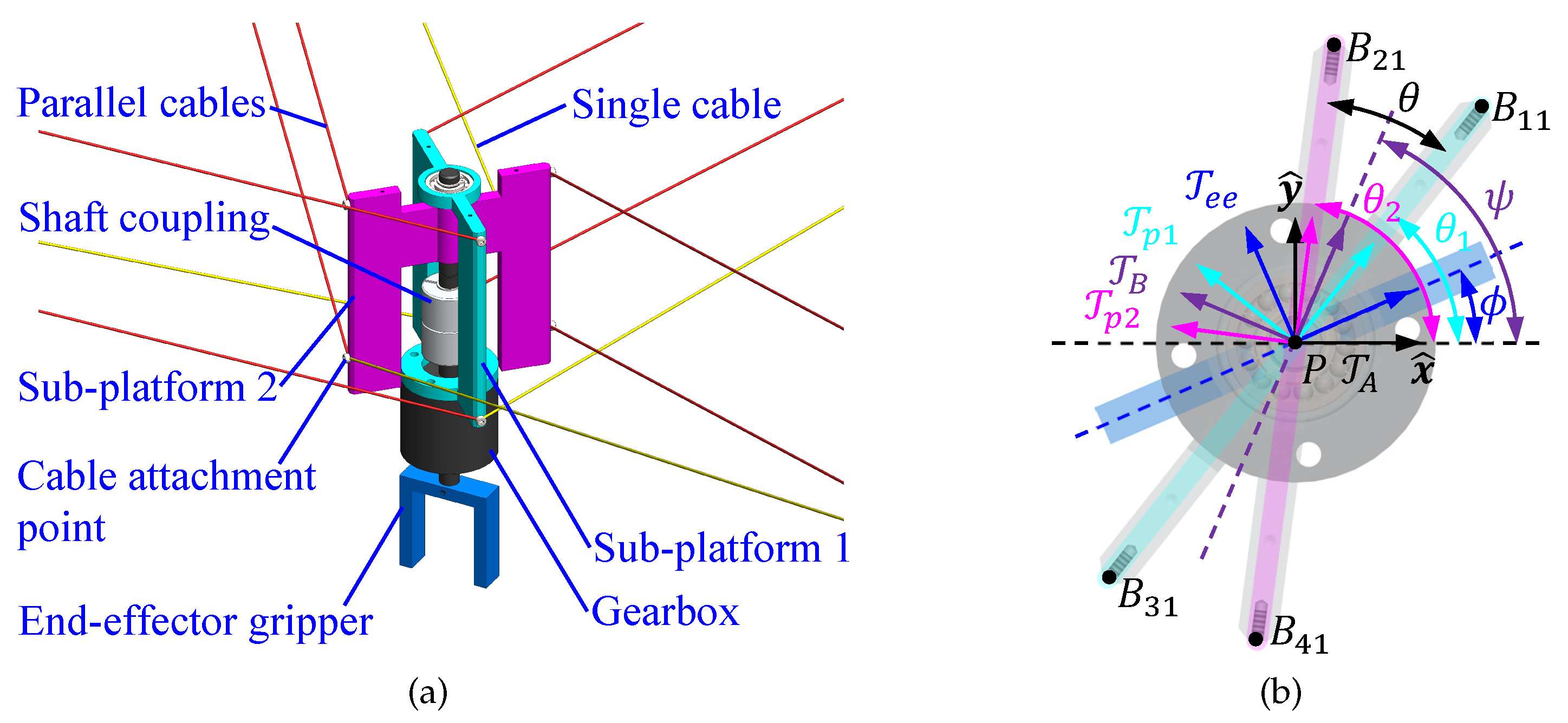
2.2. Articulated Moving Platform
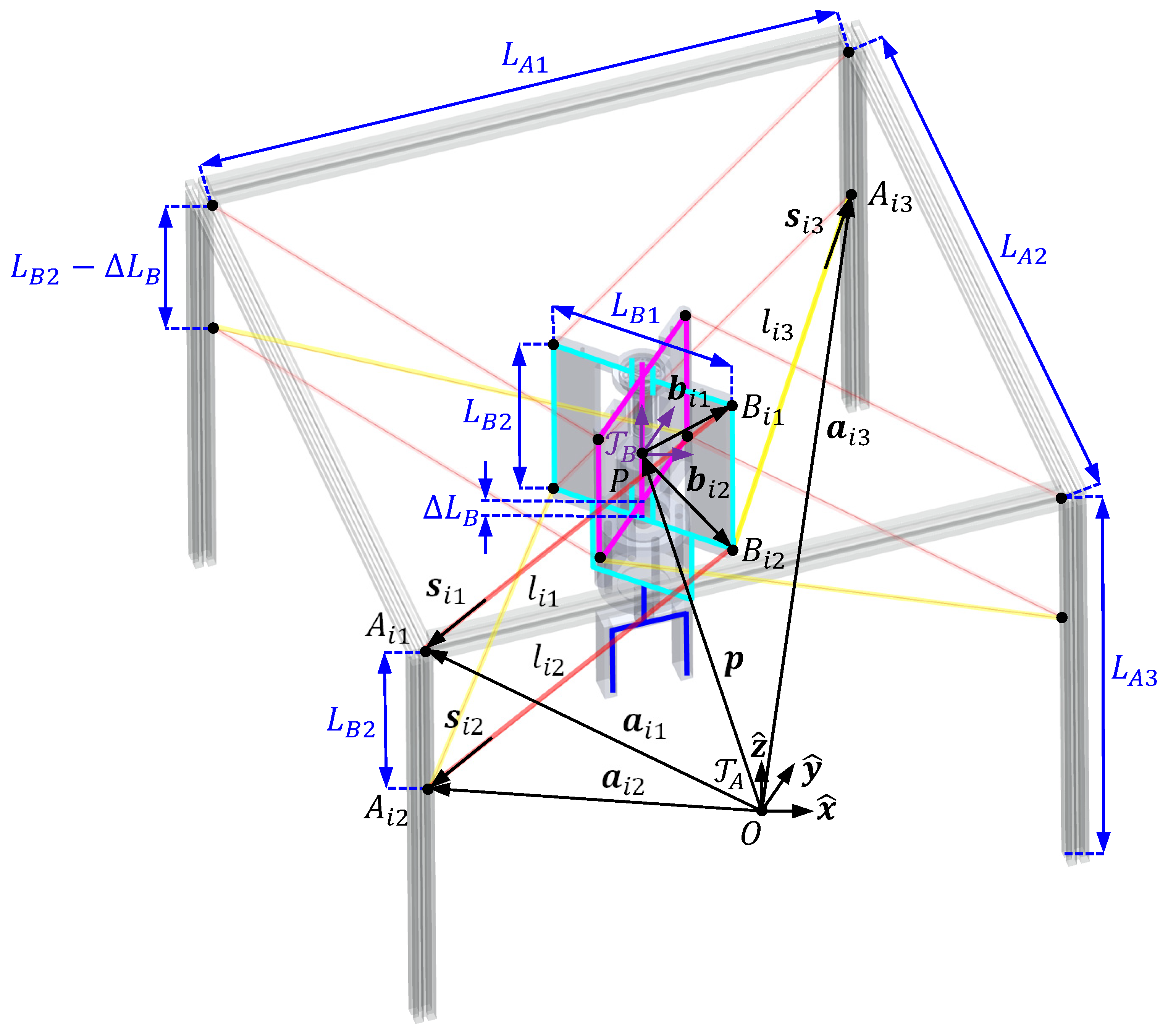
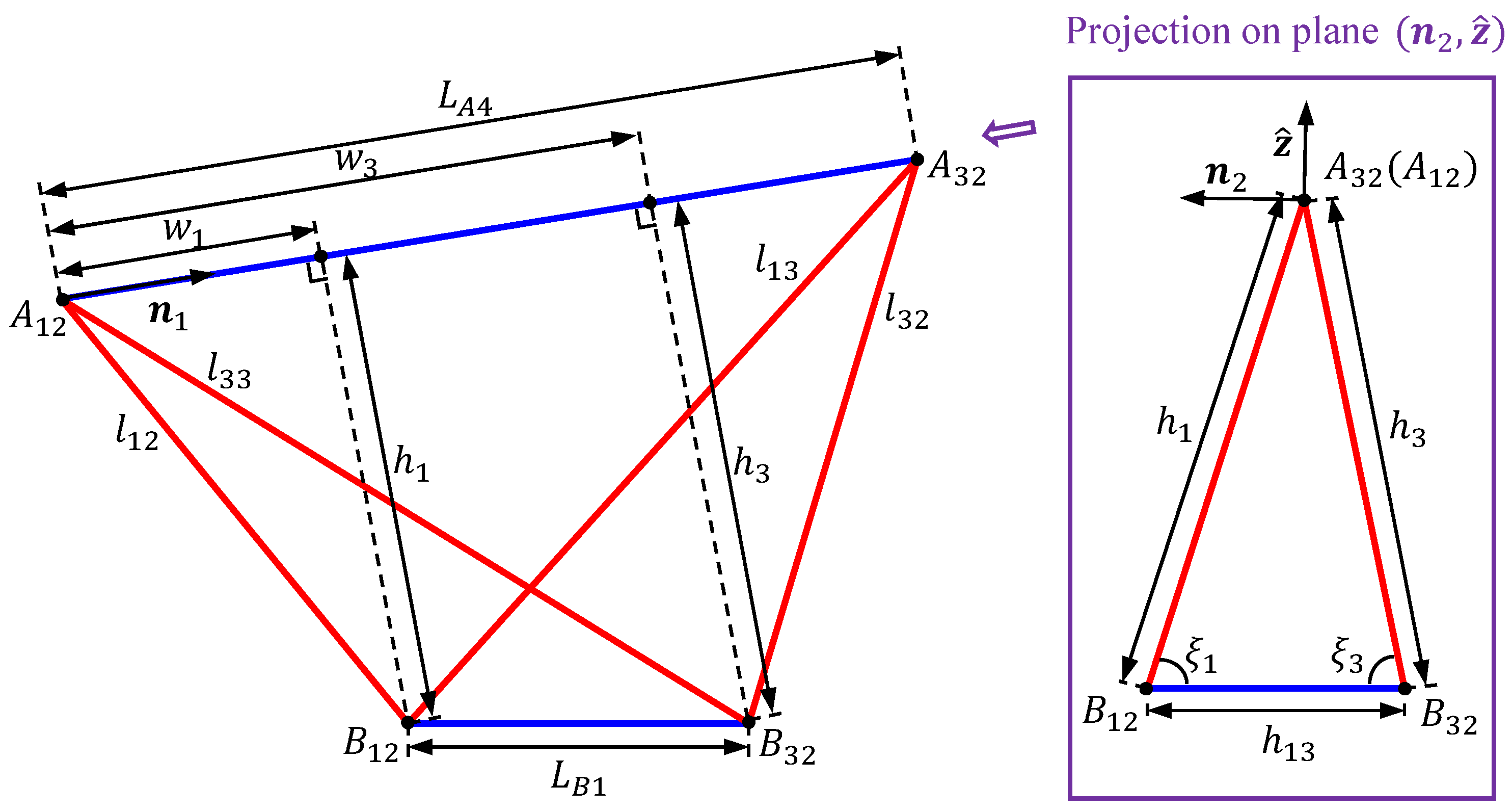
3. Kinematics
3.1. Inverse and Forward Kinematics
3.2. Jacobian Matrix
4. Dynamics
4.1. Dynamics of Moving Platform
4.2. Dynamics of Drive Train
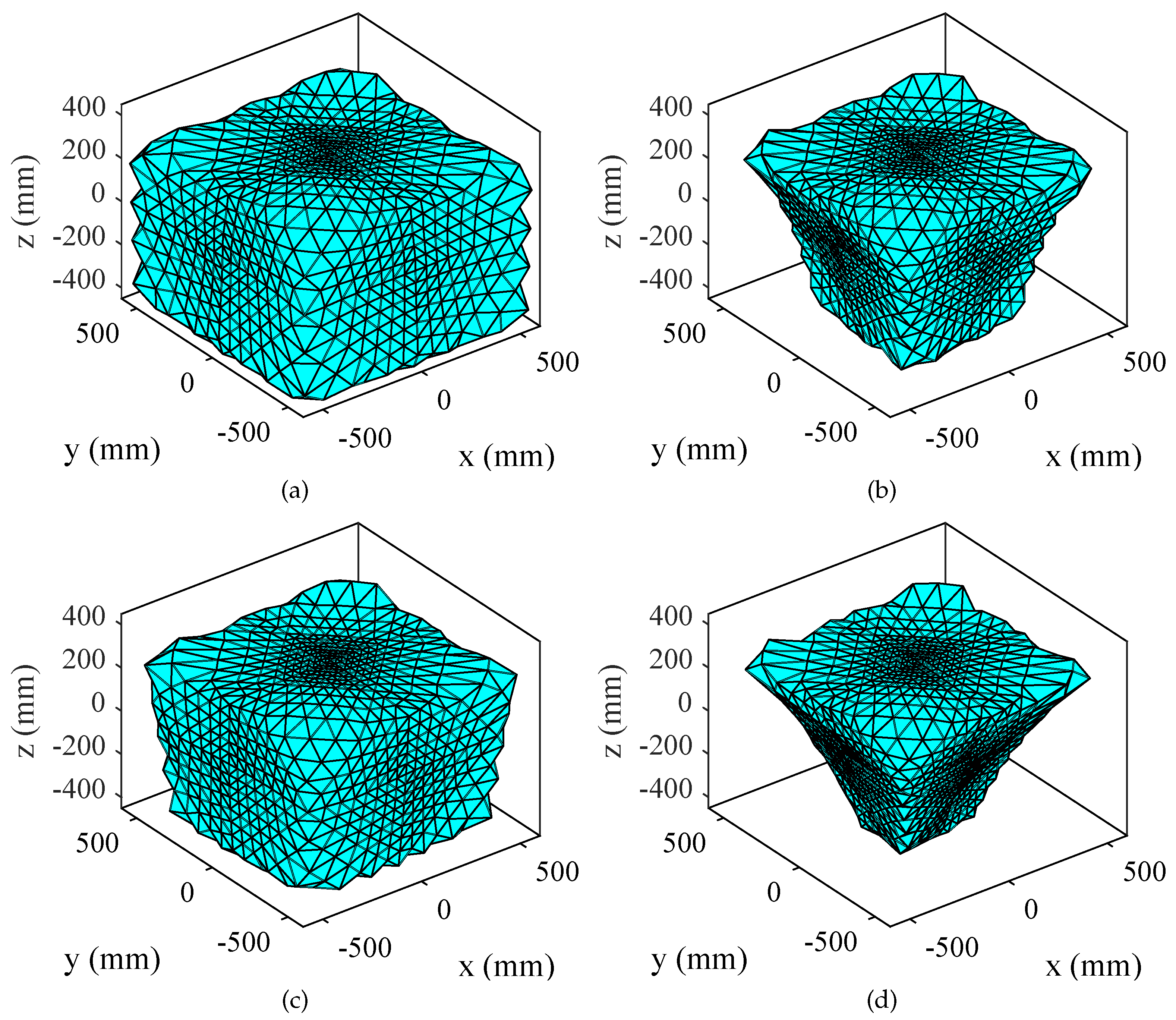
5. Workspace Analysis
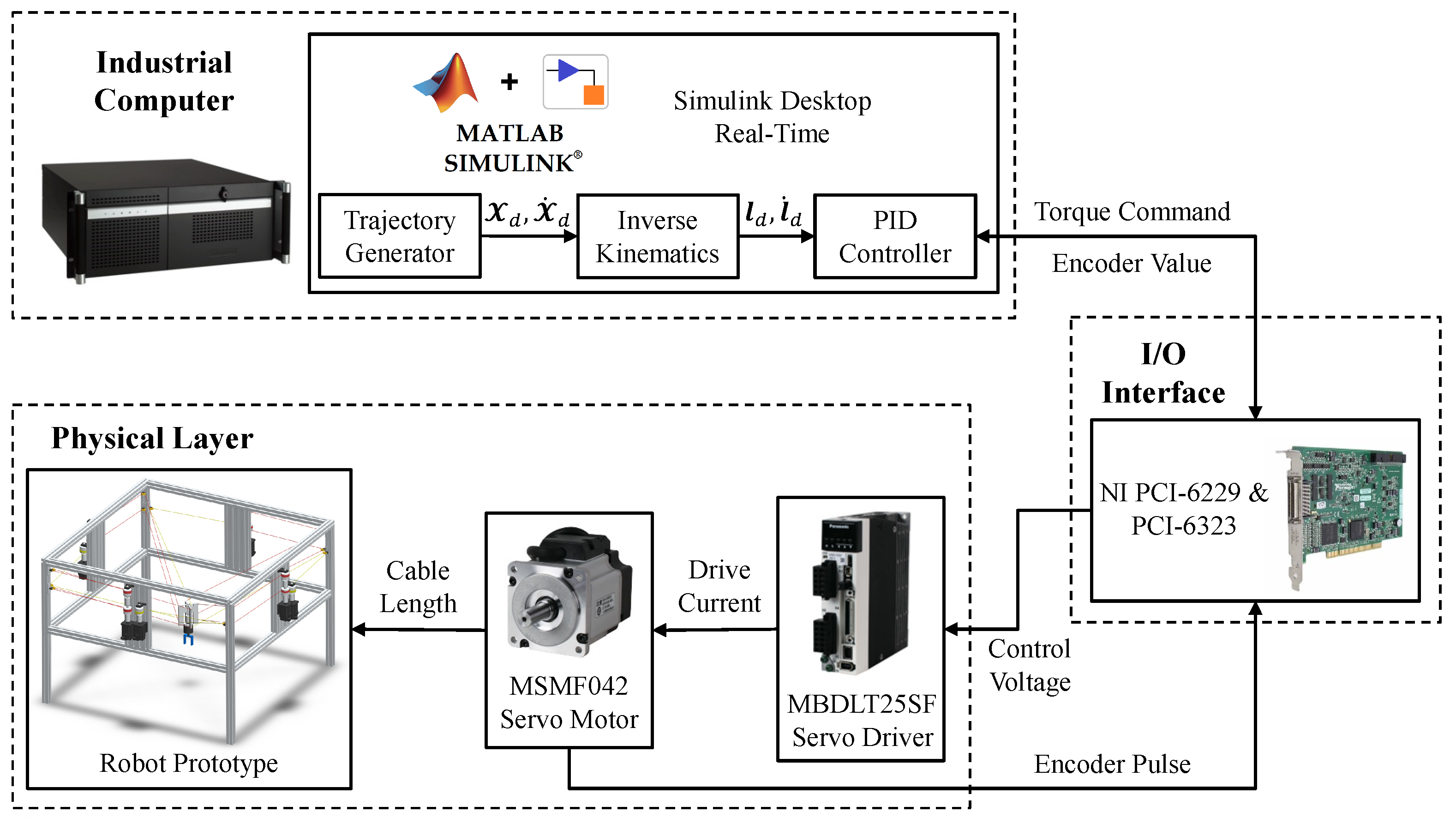
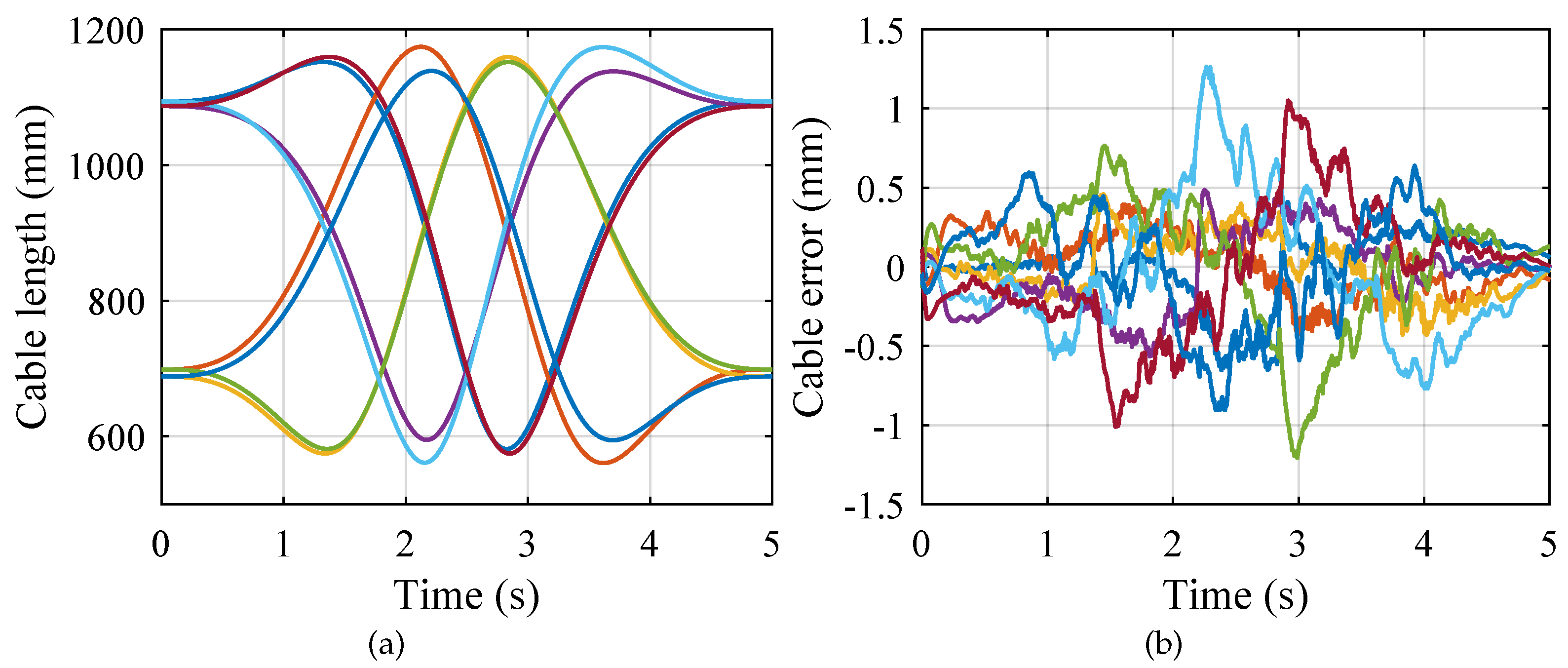
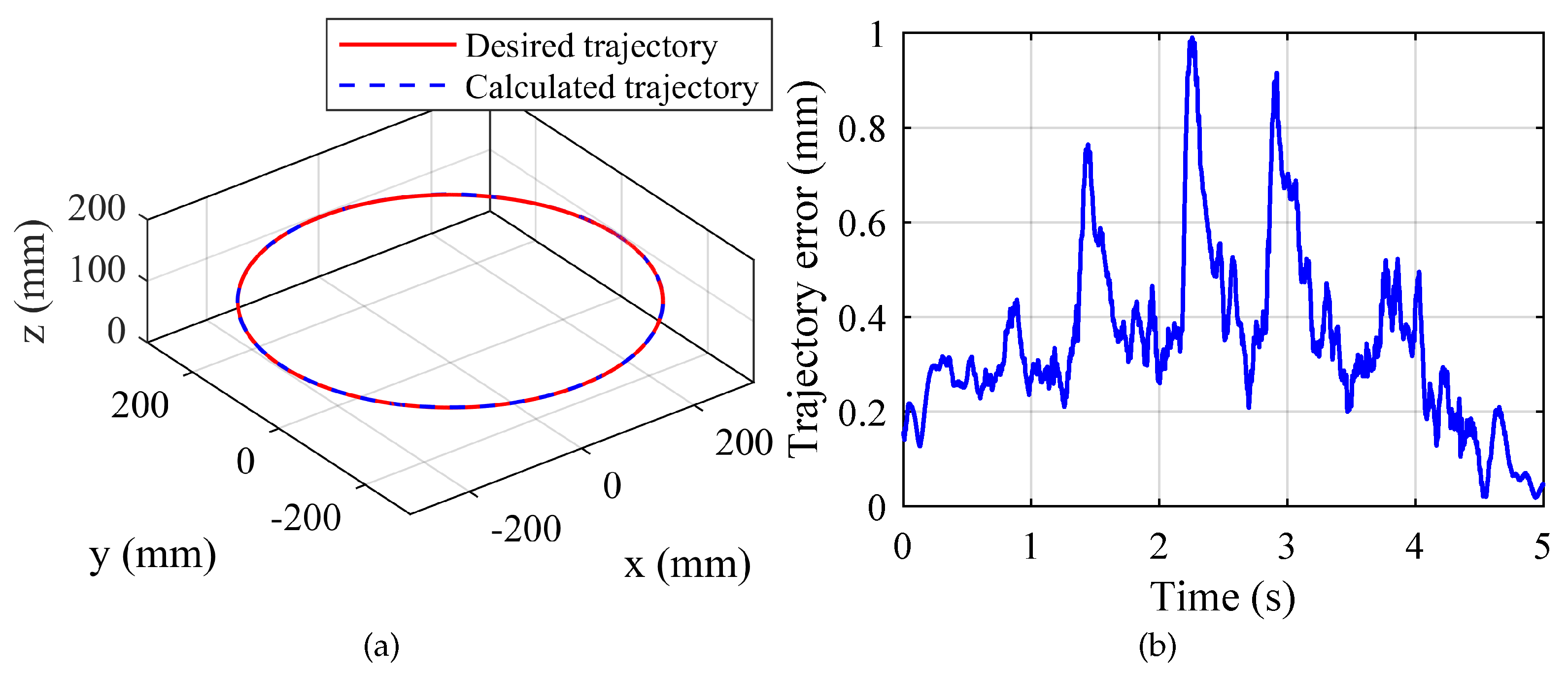
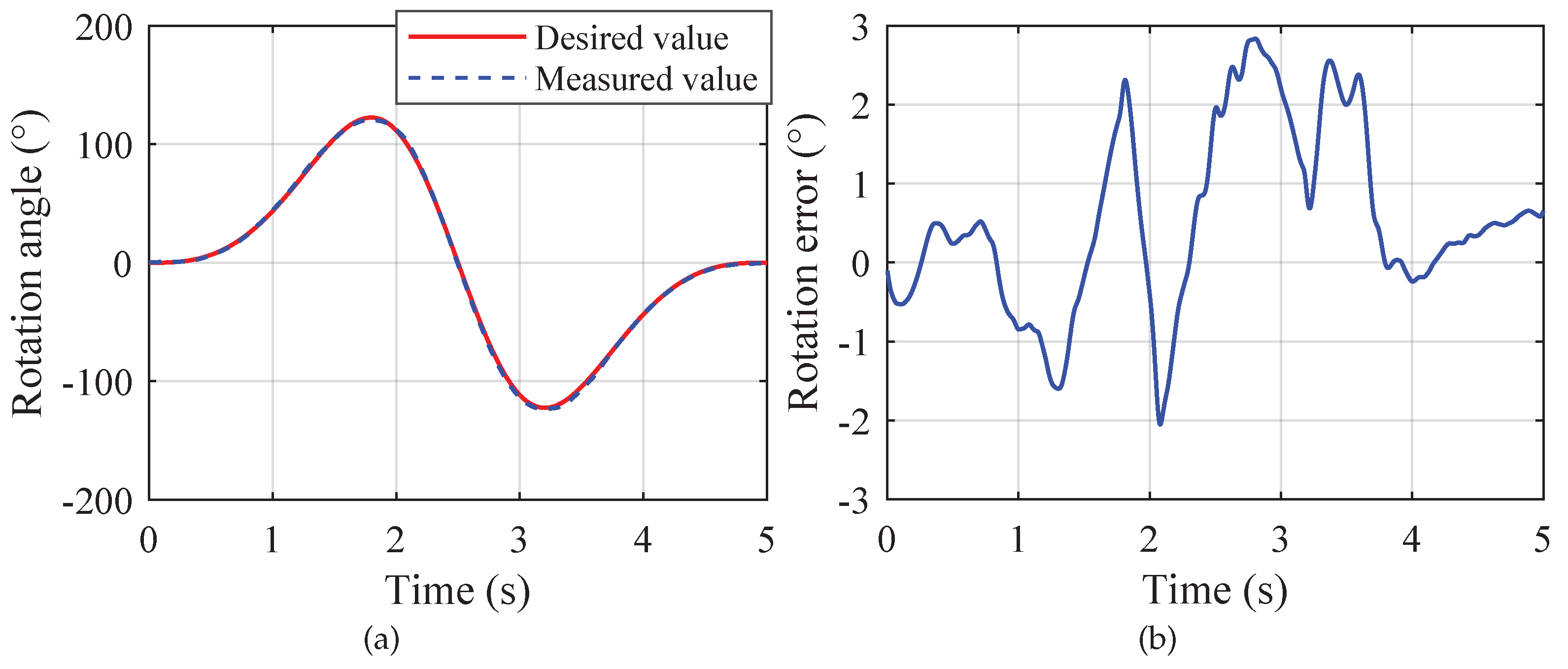
6. Experiment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gosselin, C. Cable-driven parallel mechanisms: State of the art and perspectives. Mech. Eng. Rev. 2014, 1, DSM0004. [Google Scholar] [CrossRef] [Green Version]
- Tang, X. An overview of the development for cable-driven parallel manipulator. Adv. Mech. Eng. 2014, 6, 823028. [Google Scholar] [CrossRef] [Green Version]
- Tempel, P.; Schnelle, F.; Pott, A.; Eberhard, P. Design and programming for cable-driven parallel robots in the German Pavilion at the EXPO 2015. Machines 2015, 3, 223–241. [Google Scholar] [CrossRef]
- Jiang, X.; Barnett, E.; Gosselin, C. Dynamic point-to-point trajectory planning beyond the static workspace for six-DOF cable-suspended parallel robots. IEEE Trans. Robot. 2018, 34, 781–793. [Google Scholar] [CrossRef]
- Jamshidifar, H.; Rushton, M.; Khajepour, A. A reaction-based stabilizer for nonmodel-based vibration control of cable-driven parallel robots. IEEE Trans. Robot. 2020, 37, 667–674. [Google Scholar] [CrossRef]
- Zarebidoki, M.; Dhupia, J.S.; Xu, W. A review of cable-driven parallel robots: Typical configurations, analysis techniques, and control methods. IEEE Robot. Autom. Mag. 2022, 2–19. [Google Scholar] [CrossRef]
- Paty, T.; Binaud, N.; Caro, S.; Segonds, S. Cable-driven parallel robot modelling considering pulley kinematics and cable elasticity. Mech. Mach. Theory 2021, 159, 104263. [Google Scholar] [CrossRef]
- Zhang, Z.; Xie, G.; Shao, Z.; Gosselin, C. Kinematic calibration of cable-driven parallel robots considering the pulley kinematics. Mech. Mach. Theory 2022, 169, 104648. [Google Scholar] [CrossRef]
- Mishra, U.A.; Caro, S. Forward kinematics for suspended under-actuated cable-driven parallel robots with elastic cables: A neural network approach. ASME J. Mech. Robot. 2022, 14, 041008. [Google Scholar] [CrossRef]
- Zi, B.; Zhang, L.; Zhang, D.; Qian, S. Modeling, analysis, and co-simulation of cable parallel manipulators for multiple cranes. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1693–1707. [Google Scholar] [CrossRef]
- Zi, B.; Sun, H.; Zhang, D. Design, analysis and control of a winding hybrid-driven cable parallel manipulator. Robot. Comput.-Integr. Manuf. 2017, 48, 196–208. [Google Scholar] [CrossRef]
- Ferravante, V.; Riva, E.; Taghavi, M.; Braghin, F.; Bock, T. Dynamic analysis of high precision construction cable-driven parallel robots. Mech. Mach. Theory 2019, 135, 54–64. [Google Scholar] [CrossRef]
- Wang, R.; Li, Y. Analysis and multi-objective optimal design of a planar differentially driven cable parallel robot. Robotica 2021, 39, 2193–2209. [Google Scholar] [CrossRef]
- Abbasnejad, G.; Eden, J.; Lau, D. Generalized ray-based lattice generation and graph representation of wrench-closure workspace for arbitrary cable-driven robots. IEEE Trans. Robot. 2018, 35, 147–161. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Daney, D.; Merlet, J.P. Interval-analysis-based determination of the wrench-feasible workspace of parallel cable-driven robots. IEEE Trans. Robot. 2010, 27, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Gagliardini, L.; Gouttefarde, M.; Caro, S. Determination of a dynamic feasible workspace for cable-driven parallel robots. In Advances in Robot Kinematics; Springer: Cham, Swizterland, 2018; pp. 361–370. [Google Scholar]
- Zhang, Z.; Shao, Z.; Wang, L. Optimization and implementation of a high-speed 3-DOFs translational cable-driven parallel robot. Mech. Mach. Theory 2020, 145, 103693. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Peng, F.; Li, H.; Wang, L. Workspace analysis and optimal design of a translational cable-driven parallel robot with passive springs. ASME J. Mech. Robot. 2020, 12, 051005. [Google Scholar] [CrossRef]
- Tang, X.; Wang, W.; Tang, L. A geometrical workspace calculation method for cable-driven parallel manipulators on minimum tension condition. Adv. Robot. 2016, 30, 1061–1071. [Google Scholar] [CrossRef]
- Pott, A. Efficient computation of the workspace boundary, its properties and derivatives for cable-driven parallel robots. In Computational Kinematics; Springer: Cham, Swizterland, 2018; pp. 190–197. [Google Scholar]
- Wang, Y.; Belzile, B.; Angeles, J.; Li, Q. Kinematic analysis and optimum design of a novel 2PUR-2RPU parallel robot. Mech. Mach. Theory 2019, 139, 407–423. [Google Scholar] [CrossRef]
- Meng, Q.; Liu, X.J.; Xie, F. Design and development of a Schönflies-motion parallel robot with articulated platforms and closed-loop passive limbs. Robot. Comput.-Integr. Manuf. 2022, 77, 102352. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Nguyen, D.Q.; Baradat, C. Kinetostatic analysis of cable-driven parallel robots with consideration of sagging and pulleys. In Advances in Robot Kinematics; Springer: Cham, Swizterland, 2014; pp. 213–221. [Google Scholar]
- Hu, X.; Cao, L.; Luo, Y.; Chen, A.; Zhang, E.; Zhang, W. A novel methodology for comprehensive modeling of the kinetic behavior of steerable catheters. IEEE/ASME Trans. Mechatron. 2019, 24, 1785–1797. [Google Scholar] [CrossRef]
- Zhang, W.; Werf, K. Automatic communication from a neutral object model of mechanism to mechanism analysis programs based on a finite element approach in a software environment for CADCAM of mechanisms. Finite Elem. Anal. Des. 1998, 28, 209–239. [Google Scholar] [CrossRef]
- Yang, X.; Wu, H.; Li, Y.; Kang, S.; Chen, B. Computationally efficient inverse dynamics of a class of six-DOF parallel robots: Dual quaternion approach. J. Intell. Robot. Syst. 2019, 94, 101–113. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Zhang, Z.; Hu, X.; Zhang, W. Experimental comparison of five friction models on the same test-bed of the micro stick-slip motion system. Mech. Sci. 2015, 6, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, D.Q.; Gouttefarde, M. On the improvement of cable collision detection algorithms. In Cable-Driven Parallel Robots; Springer: Cham, Swizterland, 2015; pp. 29–40. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation | Value | Unit |
|---|---|---|---|
| Length of the base | 1200 | ||
| Width of the base | 1200 | ||
| Height of the base | 800 | ||
| Length of the moving platform | 120 | ||
| Height of the moving platform | 120 | ||
| Offset of the moving platform height | |||
| Amplification ratio of the gearbox | - | ||
| Initial value of | |||
| Initial value of | |||
| Initial value of | 0 | ||
| Mass of sub-platform 1 | |||
| Center of mass position of sub-platform 1 | |||
| Rotational inertia matrix of sub-platform 1 | |||
| Mass of sub-platform 2 | |||
| Center of mass position of sub-platform 2 | |||
| Rotational inertia matrix of sub-platform 2 | |||
| Mass of the end-effector | |||
| Center of mass position of the end-effector | |||
| Rotational inertia matrix of the end-effector | |||
| Coulomb friction coefficient of the drive unit | - | ||
| Viscous friction coefficient of the drive unit | - | ||
| Upper bound of the cable tension | 50 | ||
| Lower bound of the cable tension | 0 |
| Scenario | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|
| Volume of the robot covered by the dynamic feasible workspace |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Xie, Y.; Chen, X.; Li, Y. Kinematic and Dynamic Modeling and Workspace Analysis of a Suspended Cable-Driven Parallel Robot for Schönflies Motions. Machines 2022, 10, 451. https://doi.org/10.3390/machines10060451
Wang R, Xie Y, Chen X, Li Y. Kinematic and Dynamic Modeling and Workspace Analysis of a Suspended Cable-Driven Parallel Robot for Schönflies Motions. Machines. 2022; 10(6):451. https://doi.org/10.3390/machines10060451
Chicago/Turabian StyleWang, Ruobing, Yanlin Xie, Xigang Chen, and Yangmin Li. 2022. "Kinematic and Dynamic Modeling and Workspace Analysis of a Suspended Cable-Driven Parallel Robot for Schönflies Motions" Machines 10, no. 6: 451. https://doi.org/10.3390/machines10060451
APA StyleWang, R., Xie, Y., Chen, X., & Li, Y. (2022). Kinematic and Dynamic Modeling and Workspace Analysis of a Suspended Cable-Driven Parallel Robot for Schönflies Motions. Machines, 10(6), 451. https://doi.org/10.3390/machines10060451