1. Introduction
Hydrodynamic journal bearings, as one of the main mechanical moving parts of rotating machinery, always remain prone to failure because of the harsh industrial environment and no doubt display increasing probability of failure with service life. As such, effective maintenance for rotor–journal bearing systems is necessary to ensure that these machines can be operated properly. Conventional maintenance techniques for rotor–journal bearing systems can be broadly classified into three categories [
1]: breakdown maintenance (BM), scheduled maintenance (SM) and condition-based maintenance (CBM). SM sets a periodic interval to perform overhauling regardless of the health status of a machine, while BM takes place when failure has already occurred. Unfortunately, due to the increasing complexity and the better quality and reliability requirements of rotating machinery, both methods have a substantial economic impact and potential safety concerns, rendering them unsuitable for complex industrial machines. In comparison, CBM is a better choice for complex rotating machinery, as it attempts to avoid unnecessary maintenance tasks by taking maintenance actions only when there is evidence of abnormal behavior of the machines [
2]. Implementing a CBM paradigm requires the machine’s health to be monitored in a timely and accurate manner. Therefore, condition monitoring and fault diagnostics of rotor–journal bearing systems are gaining heightened popularity.
During the service life of rotor–journal bearings systems, the potential failure modes can be classified as characteristic faults (due to oil film instability), which occur only in oil-film-bearing-supported rotor systems, or common faults (due to imbalance, misalignment, cracked shaft, excessive preload, loose rotating part and rub), which can occur in all rotating machinery [
3,
4]. Conventional fault diagnosis techniques for rotor–journal bearing systems can be classified into two categories [
5]: traditional signal-processing techniques and machine learning techniques.
Identifying the fault types of rotor–journal bearing systems using the various signal-processing-technique-based methods is a time-consuming and laborious work which requires a certain amount of prior knowledge [
6] and cannot meet the real-time requirements imposed by CBM. Compared with the traditional signal-processing-technique-based methods, machine-learning-based intelligent diagnosis methods can automatically handle the vibration data and comprehensively recognize fault patterns of rotating machinery.
Generally, there are two types of machine-learning-based fault diagnosis techniques: traditional machine learning techniques and deep learning techniques. The traditional machine learning algorithms commonly applied in intelligent fault diagnosis of rotating machinery mainly contain support vector machines (SVM) [
7,
8] and artificial neural networks (ANN) [
9,
10]. However, the traditional intelligent diagnosis methods have inherent limitations [
11]: (1) Variable working conditions and composite faults make it difficult to extract signal features effectively; (2) the extracted signal features must be selected with the advice of experienced engineering experts; (3) shallow machine learning algorithms are not able to adequately learn complex nonlinear relationships between the input data.
The deep-learning-based fault diagnosis approach for rotating machinery can learn the raw input’s deep-level representations and hierarchical patterns, providing significant improvements in generalization capability and classification accuracy. Deep learning architectures such as deep belief networks [
12], deep autoencoder networks [
13], recurrent neural networks [
14,
15] and convolution neural networks (CNN) [
16,
17,
18] have been applied to the field of failure diagnosis of rotation machinery. Among them, the CNN-based intelligent fault diagnosis methods have the capability of representation learning, which can effectively learn the in-depth information of the raw input in a shift-invariant manner and have achieved some results in the fault diagnosis of rotor–journal bearing systems. Alves et al. [
19] proposed a CNN-based condition monitoring method for the rotor–journal bearings to predict ovalization faults in hydrodynamic journal bearings. Using shaft orbit images generated from vibration signals, Jiang et al. [
20] proposed a multilayer CNN model to diagnose the faults of turbomachines, improving the generality and robustness of the CNN. Shao et al. [
21] developed an enhanced CNN-based fault diagnosis method to detect the faults of a rotor–bearing system under variable operating conditions. He et al. [
22] proposed a CNN-based fault diagnosis method for the rotor-bearing systems using small labeled infrared thermal images as model input. Kumar et al. [
23] proposed a sparse CNN-based fault diagnosis for rotor–bearing systems at varying speeds by developing sparsity cost in the existing cost function of a CNN to enhance the learning capability of the CNN.
Although the CNN-based fault diagnosis method has academically achieved certain results in fault diagnosis of rotor–journal bearing systems, diagnostic performance still needs to be improved to meet the challenges of the complex industrial production scene. Harsh industrial environments place high accuracy and time requirements on equipment condition monitoring systems. The common approach to improve CNN accuracy is increasing the network’s depth and width. However, more layers and kernels in the CNN architecture imply more computational burden and longer training time. The parameter size of a CNN model can reach hundreds of thousands or even millions, leading to overfitting, vanishing gradient, and low computational efficiency. Therefore, improving the accuracy of CNN models without significantly increasing the amount of computation is a difficult problem for industrial applications of CNN-based fault diagnosis methods. In addition, only the last pooling layer’s feature maps are input into the fully connected layer, and the feature maps of the shallow layers are all neglected in the typical CNN structures. Therefore, it is of practical value to improve the performance of fault diagnosis methods based on CNNs by integrating the shallow information while reducing the parameter size of the model.
To address the issues mentioned above, some researchers have adopted various methods to improve the pattern recognition performance of CNNs. Lin et al. [
24] proposed a novel CNN structure called “Network In Network” to enhance model discriminability by stacking three multilayer perceptron convolutional layers and one global average pooling layer. Wu et al. [
25] proposed a CNN-based automatic modulation classification method with multi-feature fusion, and experimental results show that the proposed method has good performance on the public dataset. Li et al. [
26] proposed a modified CNN for fault diagnosis based on the LeNet-5 architecture by replacing the fully connected layer with a global average pooling layer. Wang et al. [
27] proposed an end-to-end health state diagnostics model based on a CNN with multiscale feature extraction modules, which can directly learn feature maps from the raw vibration signal. Kim et al. [
28] propose a direct-connection-CNN-based fault diagnosis method for rotor systems by improving the connectivity between various layers within the CNN. Kumar et al. [
29] proposed a CNN model with multiple convolutional layers and batch normalization layers to detect the bearing faults in a squirrel cage induction motor. Wang et al. [
30] proposed an improved 1D-CNN-based bearing fault diagnosis method by processing long-time series by introducing a dilated convolution operation. Zhang et al. [
31] proposed an improved CNN model with multiscale feature extraction to diagnose bearing defects using limited training samples. Luo et al. [
32] proposed an improved CNN framework with shallow pooling layer information fusion to detect the faults of high-speed train axle–box bearing systems. Fu et al. [
33] proposed a residual-learning-based CNN with multiscale comprehensive feature fusion to recognize vehicle color. Jun et al. [
34] proposed an improved CNN model with multilayer information fusion to predict the remaining useful life of bearings. Sang et al. [
35] presented an improved CNN model with a multi-information flow for person reidentification. Nguyen et al. [
36] constructed a multibranch structure deep neural network model to diagnose bearing faults using multiple-domain image representation data.
However, as the improved CNN models mentioned above input information from the shallow layers to the classification layer, the parameter sizes in these CNN models are large, and the required memory tends to increase very quickly with high hardware resource consumption. The performance of these methods mentioned above still must be improved to meet the challenge of complex industrial scenarios. In this work, a simplified global information fusion-CNN (SGIF-CNN) model is presented to enhance the performance of the CNN-based fault diagnosis approach for rotor–journal bearing systems without increasing computational burden. In the SGIF-CNN structure, the feature maps of all the convolutional and pooling layers are globally convolved into a corresponding feature sequence. Then, all the feature sequences are concatenated into a one-dimensional feature vector before connecting to the fully connected layer for the pattern recognition task. The effectiveness of the SGIF-CNN-based fault diagnosis approach for rotor–journal bearing systems is evaluated on experimental datasets from a test bench and engineering datasets from an ultralarge air separator. The results of case studies on datasets of the rotor–journal bearing systems show that the SGIF-CNN model could improve computing efficiency and fault diagnosis accuracy compared to a traditional CNN.
The main contributions of this paper are summarized as follows:
- (1)
A novel SGIF-CNN architecture is proposed to reduce model parameter size and enhance network capacity by shortcutting the simplified information of the shallow layers.
- (2)
Time–frequency plots with an excellent resolution of the vibration data acquired from the rotor–journal bearing system are generated using the Adaptive Optimal Kernel Time–Frequency Representation (AOK-TFR) algorithm. As a result, proper features for different health conditions of the rotor–journal bearing systems can be obtained.
- (3)
A novel fault diagnosis method for rotor–journal bearing systems based on AOK-TFR and SGIF-CNN is proposed. By concatenating the simplified shallow layers’ information into the fully connected layer, the effective information amount input into the classification layer can be increased without increasing computational burden.
- (4)
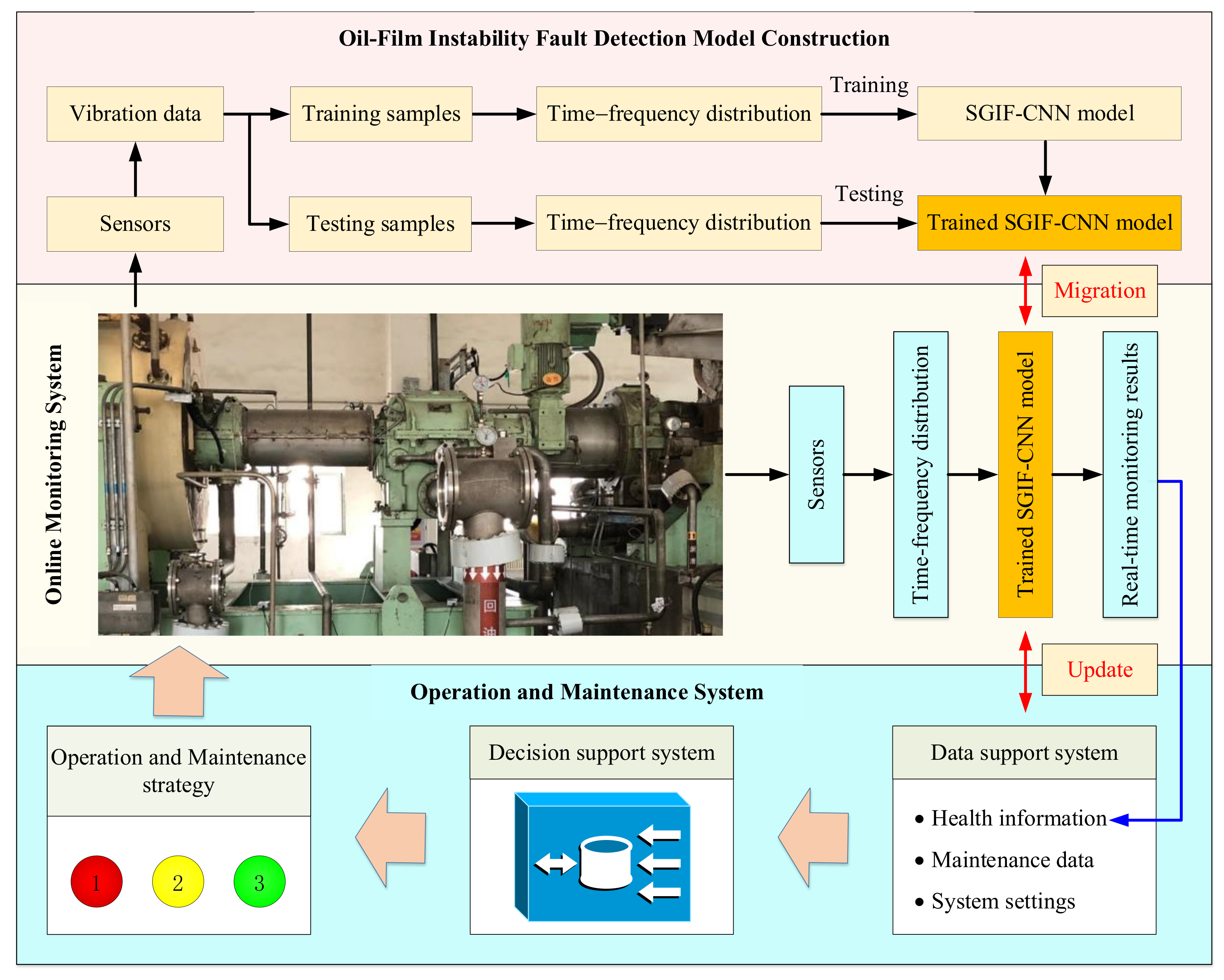
The industrial applications framework of the SGIF-CNN-based fault diagnosis method for rotor–bearing systems is presented to realize the real-time fault monitoring of the ultralarge air separator in a production plant.
The remainder of this paper is organized as follows.
Section 2 provides a brief review of AOK-TFR and CNN. In
Section 3, the principle of SGIF-CNN and the methodology of the fault diagnosis method based on AOK-TFR and SGIF-CNN are presented. In
Section 4, validations of the proposed method with experimental and engineering datasets are presented and discussed. Finally, some conclusions are drawn in
Section 5.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}