


The Role of Instant Centers in Kinematics and Dynamics of Planar Mechanisms: Review of LaMaViP’s Contributions


Abstract
:1. Introduction
2. Planar Kinematics Revisited through Instant Centers (ICs)
2.1. Instant Center Determination
2.1.1. Single-DOF PMs
- (a)
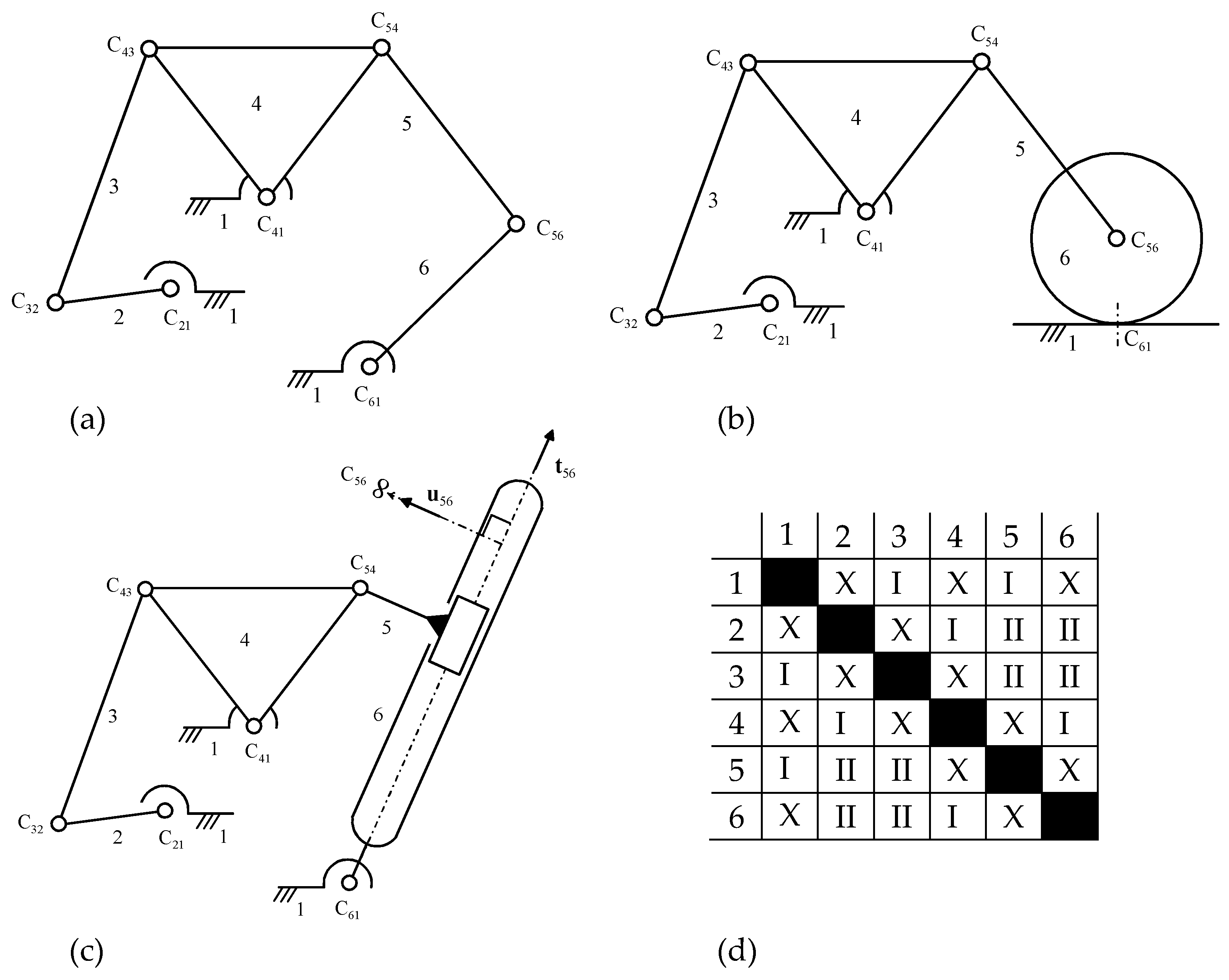
- in the first m columns the cells corresponding to the primary ICs are filled with the symbol “X” and the coordinates of these ICs are computed by solving the constraint-equation system;
- (b)
- the rows with at least two filled cells are selected and compared to identify all the couple of rows that have two filled cells in the same two columns;
- (c)
- for each couple of rows identified in the previous step, the two linear equations are written which correspond to the lines identified by the two columns with filled cells. The so-obtained system of two linear equations is solved to determine the coordinates of the secondary IC with indices given by the indices of the two rows; then, the corresponding cells are filled with the roman number “I”;
- (d)
- focusing only on the row couples whose indices correspond to the ones of the still empty cells of the first m columns, the steps (b) and (c) are repeated until either all the cells of the first m columns are filled or at step (b) is not possible to identify any couple of rows (i.e., the mechanism is indeterminate). At each repetition of the steps (b) and (c) the roman number used to fill the cells is increased of one unit (see, Figure 5d);
- (e)
- if step (d) brings to fill all the cells of the first m columns, the coordinates of all the secondary ICs have been computed and the algorithm is stopped; otherwise (i.e., in the case of indeterminate mechanisms) the following steps are implemented:
- (e.1)
- focusing only on the row couples whose indices correspond to the ones of the still empty cells of the first m columns, a row couple that has two filled cells in the same column is selected. Moreover, the two cells with indices coincident with the row indices of the selected row couple are filled with the starred roman number “I*”;
- (e.2)
- the coordinates of the secondary IC, whose indices coincide with the two row indices of the row couple selected in the previous step, are written as the ones of a point lying on the line passing through the two IC identified by the two filled cells located in the above-mentioned same column. That is, a line parameter, say λ, is introduced and the two IC coordinates are explicitly written as linear functions of λ;
- (e.3)
- focusing only on the row couples whose indices correspond to the ones of the still empty cells of the first m columns, the steps (b) and (c) are repeated by taking into account also the cells filled with “I*” and analytically solving the two-linear-equations system of step (c) still to identify a secondary IC that must lie on three lines. During this step, the cells corresponding to the located ICs are filled with “I*” and the analytic solutions of the above-mentioned equation systems bring to explicitly write the coordinates of these ICs as functions of the parameter λ introduced in the previous step;
- (e.4)
- the equations of the three lines, which the secondary IC identified in the previous step lies on, are written. Such equations constitute a system of three equations in three unknowns, the two coordinates of the IC and the parameter λ, and the three equations are all linear in the two coordinates of the IC;
- (e.5)
- the coordinates of the above-mentioned IC are explicitly expressed as functions of λ by solving the first two equations of the system deduced in the previous step. Then, the so-obtained expressions are introduced in the third equation of the same system to obtain one equation in the unique unknown λ;
- (e.6)
- the equation in λ deduced in step (e.5) is solved and the computed value of λ is back substituted in the explicit expressions of the coordinates of all the ICs deduced in the previous steps to compute their numeric values;
- (e.7)
- jump to step (d)
- (i)
- a primary IC must lie on one or more known lines,
- (ii)
- a still-unknown secondary IC is found which must lie on three or more lines,
2.1.2. Multi-DOF PMs
2.2. Singularity Analysis
3. Influence of IC Locations on Planar-Mechanism Dynamics
3.1. Single-DOF PMs
3.2. Multi-DOF PMs
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Klein, A.W. Kinematics of Machinery; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1917. [Google Scholar]
- Paul, B. Kinematics and Dynamics of Planar Machinery; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Gans, R.F. Analytical Kinematics: Analysis and Synthesis of Planar Mechanisms; Butterworth-Heinemann Inc.: Boston, MA, USA, 1991. [Google Scholar]
- Yan, H.-S.; Hsu, M.-H. An analytical method for locating instantaneous velocity centers. In Proceedings of the 22nd ASME Biennial Mechanisms Conference, Scottsdale, AZ, USA, 13–16 September 1992; Volume 47, pp. 353–359. [Google Scholar]
- Foster, D.E.; Pennock, G.R. A Graphical Method to Find the Secondary Instantaneous Centers of Zero Velocity for the Double Butterfly Linkage. ASME J. Mech. Des. 2003, 125, 268–274. [Google Scholar] [CrossRef]
- Pennock, G.R.; Kinzel, E.C. Path curvature of the single flier eight-bar linkage. ASME J. Mech. Des. 2004, 126, 470–477. [Google Scholar] [CrossRef]
- Foster, D.E.; Pennock, G.R. Graphical methods to locate the secondary instantaneous centers of single-degree-of-freedom indeterminate linkages. ASME J. Mech. Des. 2005, 127, 249–256. [Google Scholar] [CrossRef]
- Butcher, E.A.; Hartman, C. Efficient enumeration and hierarchical classification of planar simple-jointed kinematic chains: Application to 12- and 14-bar single degree-of-freedom chains. Mech. Mach. Theory 2005, 40, 1030–1050. [Google Scholar] [CrossRef]
- Cardona, A.; Pucheta, M. An automated method for type synthesis of planar linkages based on a constrained subgraph isomorphism detection. Multibody Syst. Dyn. 2007, 18, 233–258. [Google Scholar]
- Murray, A.P.; Schmiedeler, J.P.; Korte, B.M. Kinematic Synthesis of Planar, Shape-Changing Rigid-Body Mechanisms. ASME J. Mech. Des. 2008, 130, 032302. [Google Scholar] [CrossRef]
- Kong, X.; Huang, C. Type synthesis of single-DOF single-loop mechanisms with two operation modes. In Proceedings of the ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots, ReMAR 2009, London, UK, 22–24 June 2009; pp. 136–141. [Google Scholar]
- Wolbrecht, E.T.; Reinkensmeyer, D.J.; Perez-Gracia, A. Single degree-of-freedom exoskeleton mechanism design for finger rehabilitation. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, J.; Ting, K.-L.; Zhao, D. Equivalent Linkages and Dead Center Positions of Planar Single-Degree-of-Freedom Complex Linkages. ASME J. Mech. Robot. 2015, 7, 044501. [Google Scholar] [CrossRef]
- St-Onge, D.; Gosselin, C.M. Synthesis and Design of a One Degree-of-Freedom Planar Deployable Mechanism with a Large Expansion Ratio. ASME J. Mech. Robot. 2016, 8, 021025. [Google Scholar] [CrossRef]
- Nikravesh, P.E. Planar Multibody Dynamics: Formulation, Programming, and Applications; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Flores, P.; Seabra, E. Dynamics of Planar Multibody Systems; VDM: Saarbrucken, Germany, 2010. [Google Scholar]
- Dixon, J.C. Suspension Geometry and Computation; John Wiley & Sons Ltd.: Chichester, UK, 2009. [Google Scholar]
- Windrich, M.; Grimmer, M.; Christ, O.; Rinderknecht, S.; Beckerle, P. Active lower limb prosthetics: A systematic review of design issues and solutions. Biomed. Eng. Online 2016, 15, 5–19. [Google Scholar] [CrossRef]
- Watson, P.C. Remote Center Compliant System. U.S. Patent US4098001, 4 July 1978. [Google Scholar]
- Kumar Mallik, A.; Ghosh, A.; Dittirich, G. Kinematic Analysis and Synthesis of Mechanisms; CRC: Boca Raton, FL, USA, 1994. [Google Scholar]
- Di Gregorio, R. An Algorithm for Analytically Calculating the Positions of the Secondary Instant Centers of Indeterminate Linkages. ASME J. Mech. Des. 2008, 130, 042303. [Google Scholar] [CrossRef]
- Di Gregorio, R. A novel method for the singularity analysis of planar mechanisms with more than one degree of freedom. Mech. Mach. Theory 2009, 44, 83–102. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. A Global Performance Index for the Kinematic Optimization of Robotic Manipulators. ASME J. Mech. Des. 1991, 113, 220–226. [Google Scholar] [CrossRef]
- Gosselin, C.M.; Angeles, J. Singularity analysis of closed-loop kinematic chains. IEEE Trans. Robot. Autom. 1990, 6, 281–290. [Google Scholar] [CrossRef]
- Ma, O.; Angeles, J. Architecture singularities of platform manipulators. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation (ICRA1991), Sacramento, CA, USA, 9–11 April 1991; pp. 1542–1547. [Google Scholar]
- Zlatanov, D.; Fenton, R.G.; Benhabib, B. A Unifying Framework for Classification and Interpretation of Mechanism Singularities. ASME J. Mech. Des. 1995, 117, 566–572. [Google Scholar] [CrossRef]
- Bonev, I.A.; Zlatanov, D.; Gosselin, C.M.M. Singularity Analysis of 3-DOF Planar Parallel Mechanisms via Screw Theory. ASME J. Mech. Des. 2003, 125, 573–581. [Google Scholar] [CrossRef]
- Hunt, K.H. Kinematic Geometry of Mechanisms; Oxford University Press: Oxford, UK, 1978; ISBN 0-19-856124-5. [Google Scholar]
- Yan, H.-S.; Wu, L.-I. The stationary configurations of planar six-bar kinematic chains. Mech. Mach. Theory 1988, 23, 287–293. [Google Scholar] [CrossRef]
- Yan, H.-S.; Wu, L.-I. On the dead-center positions of planar linkage mechanisms. ASME J. Mech. Transm. Automat. Des. 1989, 111, 40–46. [Google Scholar] [CrossRef]
- Di Gregorio, R. A novel geometric and analytic technique for the singularity analysis of one-dof planar mechanisms. Mech. Mach. Theory 2007, 42, 1462–1483. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Talpasanu, I.; Di Gregorio, R. Instant-Center Based Force Transmissivity and Singularity Analysis of Planar Linkages. ASME J. Mech. Robot. 2010, 2, 021011. [Google Scholar] [CrossRef]
- Di Gregorio, R. Systematic use of velocity and acceleration coefficients in the kinematic analysis of single-DOF planar mechanisms. Mech. Mach. Theory 2019, 139, 310–328. [Google Scholar] [CrossRef]
- Di Gregorio, R. Kinematic analysis of multi-DOF planar mechanisms via velocity-coefficient vectors and acceleration-coefficient Jacobians. Mech. Mach. Theory 2019, 142, 103617. [Google Scholar] [CrossRef]
- Di Gregorio, R. A Novel Dynamic Model for Single Degree-of-Freedom Planar Mechanisms Based on Instant Centers. ASME J. Mech. Robot. 2016, 8, 011013. [Google Scholar] [CrossRef]
- Di Gregorio, R. Kinematics and dynamics of planar mechanisms reinterpreted in rigid-body’s configuration space. Meccanica 2015, 51, 993–1005. [Google Scholar] [CrossRef]
- Di Gregorio, R. On the Use of Instant Centers to Build Dynamic Models of Single-dof Planar Mechanisms. In Advances in Robot Kinematics 2018 (ARK2018), Proceedings of the 16th International Symposium on Advances in Robot Kinematics, Bologna, Italy, 1–5 July 2018; Lenarcic, J., Parenti-Castelli, V., Eds.; Springer: Cham, Switzerland, 2018; Volume 8, pp. 242–249. [Google Scholar]
- Di Gregorio, R. A geometric and analytic technique for studying single-DOF planar mechanisms’ dynamics. Mech. Mach. Theory 2021, 168, 104609. [Google Scholar] [CrossRef]
- Ardema, M.D. Newton-Euler Dynamics; Springer: New York, NY, USA, 2005. [Google Scholar]
- Barton, L.O. Mechanism Analysis: Simplified Graphical and Analytical Techniques; Marcel Dekker Inc.: New York, NY, USA, 1993; ISBN 9780429102493. [Google Scholar]
- Coxeter, H.S.M. Introduction to Geometry, 2nd ed.; John Wiley & Sons Inc.: New York, NY, USA, 1969; ISBN 9780471504580. [Google Scholar]
- Di Gregorio, R. A geometric and analytic technique for studying multi-DOF planar mechanisms’ dynamics. Mech. Mach. Theory 2022, 176, 104975. [Google Scholar] [CrossRef]
- Eksergian, R. Dynamical Analysis of Machines. Ph.D. Thesis, Clark University, Worcester, MA, USA, 1928. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input-Output | a (*) | b (*) | ||
|---|---|---|---|---|
| Rot-Rot | (Cof − Cif)(Coi − Cik) | (Cok − Cik)(Coi − Cof) | ||
| Rot-Tra | (Cof − Cif)(Coi − Cik) | i tok (Coi − Cof) | ||
| Tra-Rot | i tif (Coi − Cik) | (Cok − Cik)(Cof − Coi) | ||
| Tra-Tra | i tif (Coi − Cik) | i tok (Cof − Coi) |
| Input-Output | a = 0 (Serial Singularity) | b = 0 (Parallel Singularity) | ||
|---|---|---|---|---|
| Rot-Rot | Cof = Cif or Coi = Cik | Cok = Cik or Coi = Cof | ||
| Rot-Tra | Cof = Cif or Coi = Cik | Coi = Cof | ||
| Tra-Rot | Coi = Cik | Cok = Cik or Cof = Coi | ||
| Tra-Tra | Coi = Cik | Cof = Coi |
| Input-Output | ar (*) | br (*) | ||
|---|---|---|---|---|
| Rot-Rot | (Cof,r − Cif,r)(Coi,r − Cik,r) | (Cok,r − Cik,r)(Coi,r − Cof,r) | ||
| Rot-Tra | (Cof,r − Cif,r)(Coi,r − Cik,r) | i tok,r (Coi,r − Cof,r) | ||
| Tra-Rot | i tif,r (Coi,r − Cik,r) | (Cok,r − Cik,r)(Cof,r − Coi,r) | ||
| Tra-Tra | i tif,r (Coi,r − Cik,r) | i tok,r (Cof,r − Coi,r) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Gregorio, R. The Role of Instant Centers in Kinematics and Dynamics of Planar Mechanisms: Review of LaMaViP’s Contributions. Machines 2022, 10, 732. https://doi.org/10.3390/machines10090732
Di Gregorio R. The Role of Instant Centers in Kinematics and Dynamics of Planar Mechanisms: Review of LaMaViP’s Contributions. Machines. 2022; 10(9):732. https://doi.org/10.3390/machines10090732
Chicago/Turabian StyleDi Gregorio, Raffaele. 2022. "The Role of Instant Centers in Kinematics and Dynamics of Planar Mechanisms: Review of LaMaViP’s Contributions" Machines 10, no. 9: 732. https://doi.org/10.3390/machines10090732
APA StyleDi Gregorio, R. (2022). The Role of Instant Centers in Kinematics and Dynamics of Planar Mechanisms: Review of LaMaViP’s Contributions. Machines, 10(9), 732. https://doi.org/10.3390/machines10090732