An Alpha/Beta Radiation Mapping Method Using Simultaneous Localization and Mapping for Nuclear Power Plants

Abstract
:1. Introduction
2. Materials and Methods
2.1. Hardware Materials
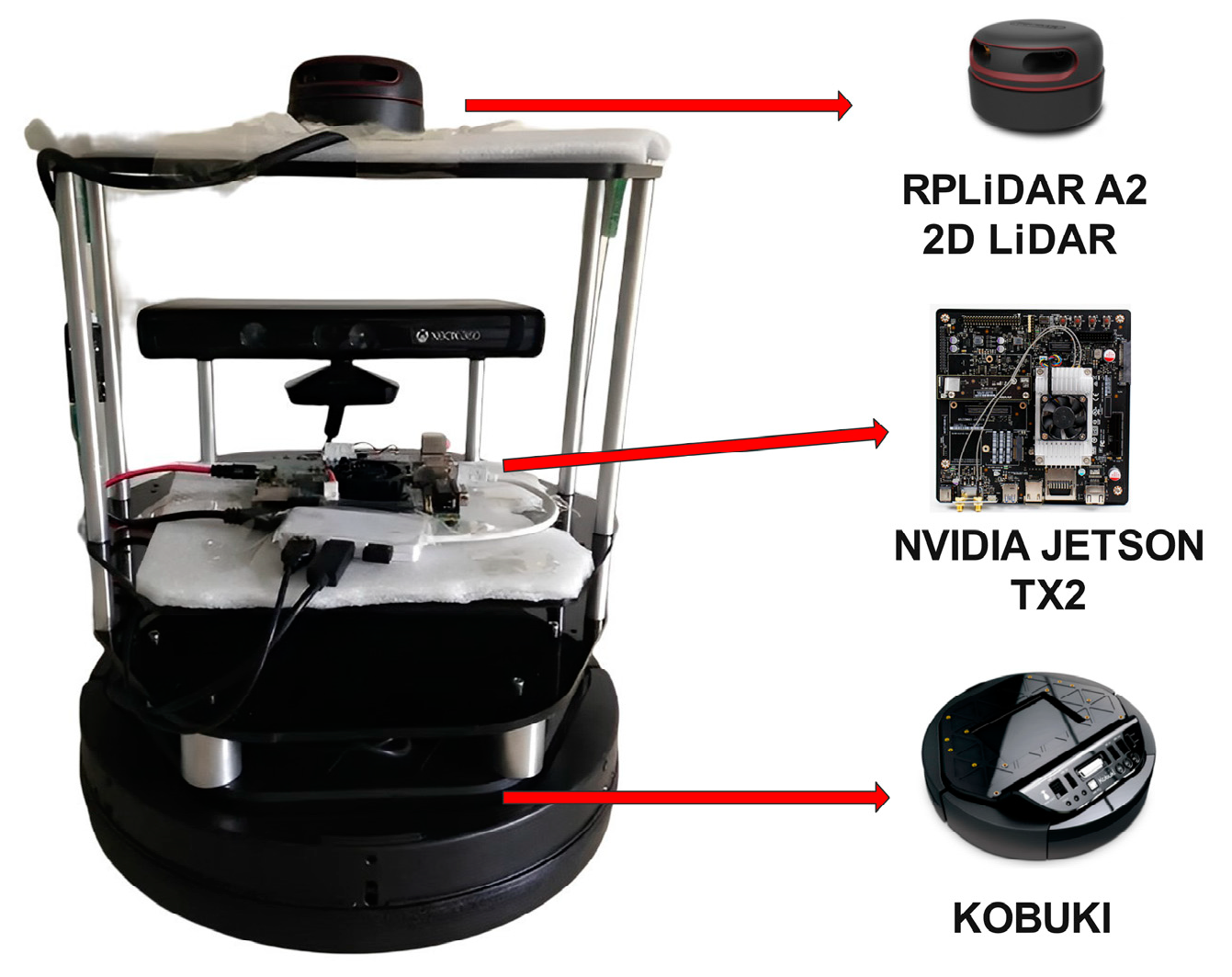
2.1.1. Robotics Platform
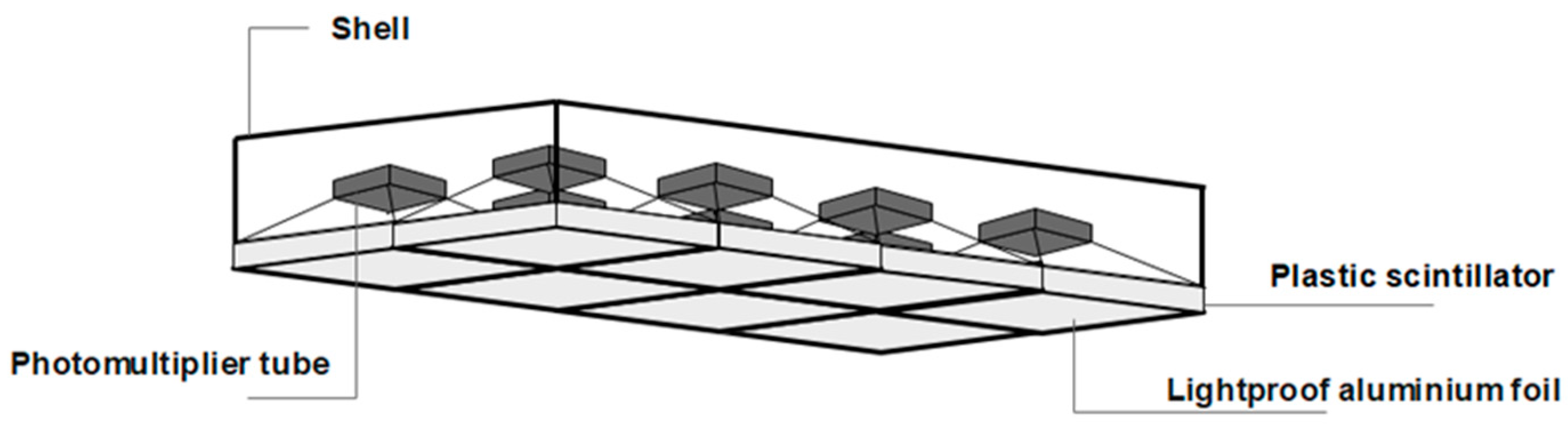
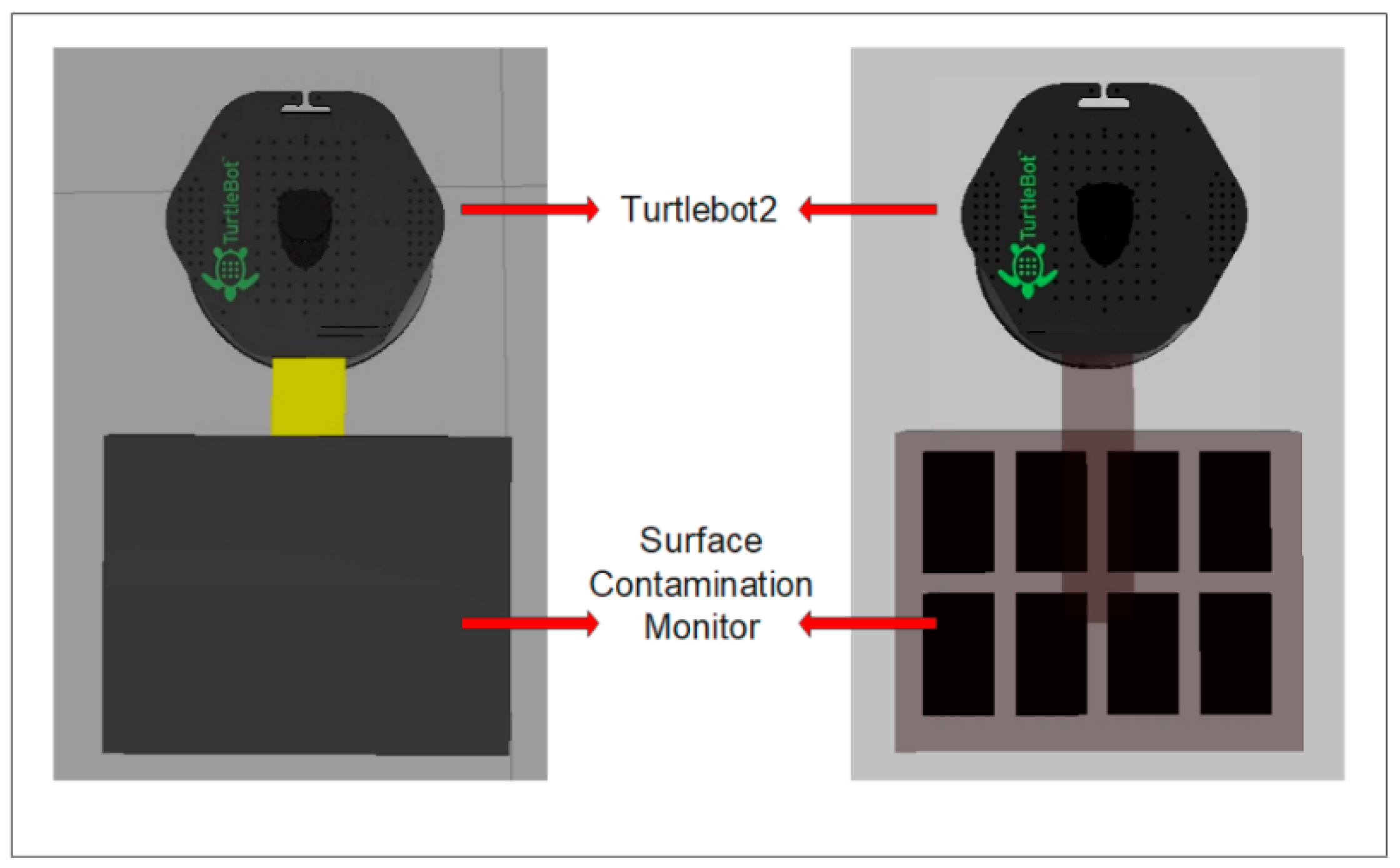
2.1.2. Surface Contamination Monitor
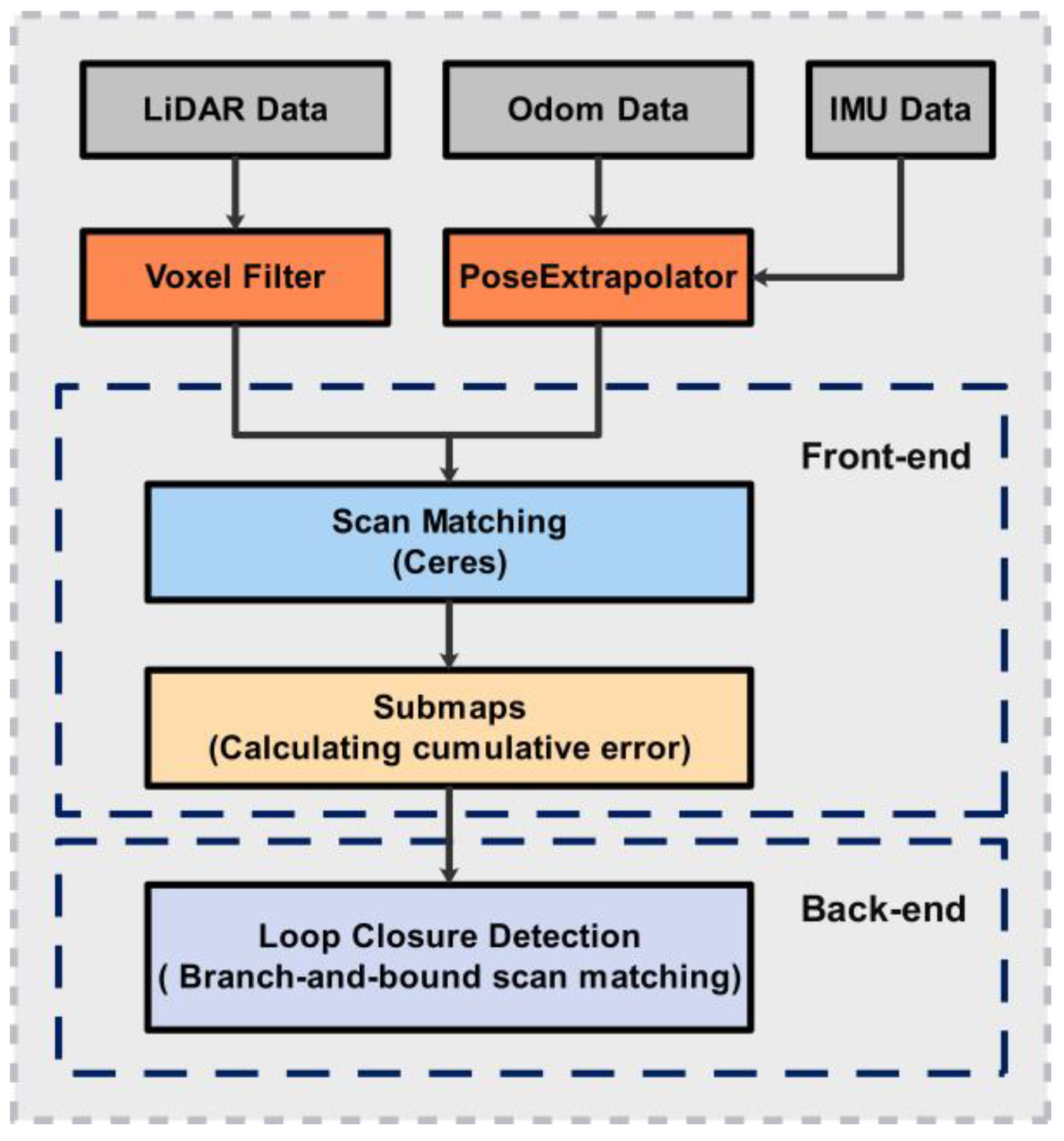
2.2. LiDAR SLAM
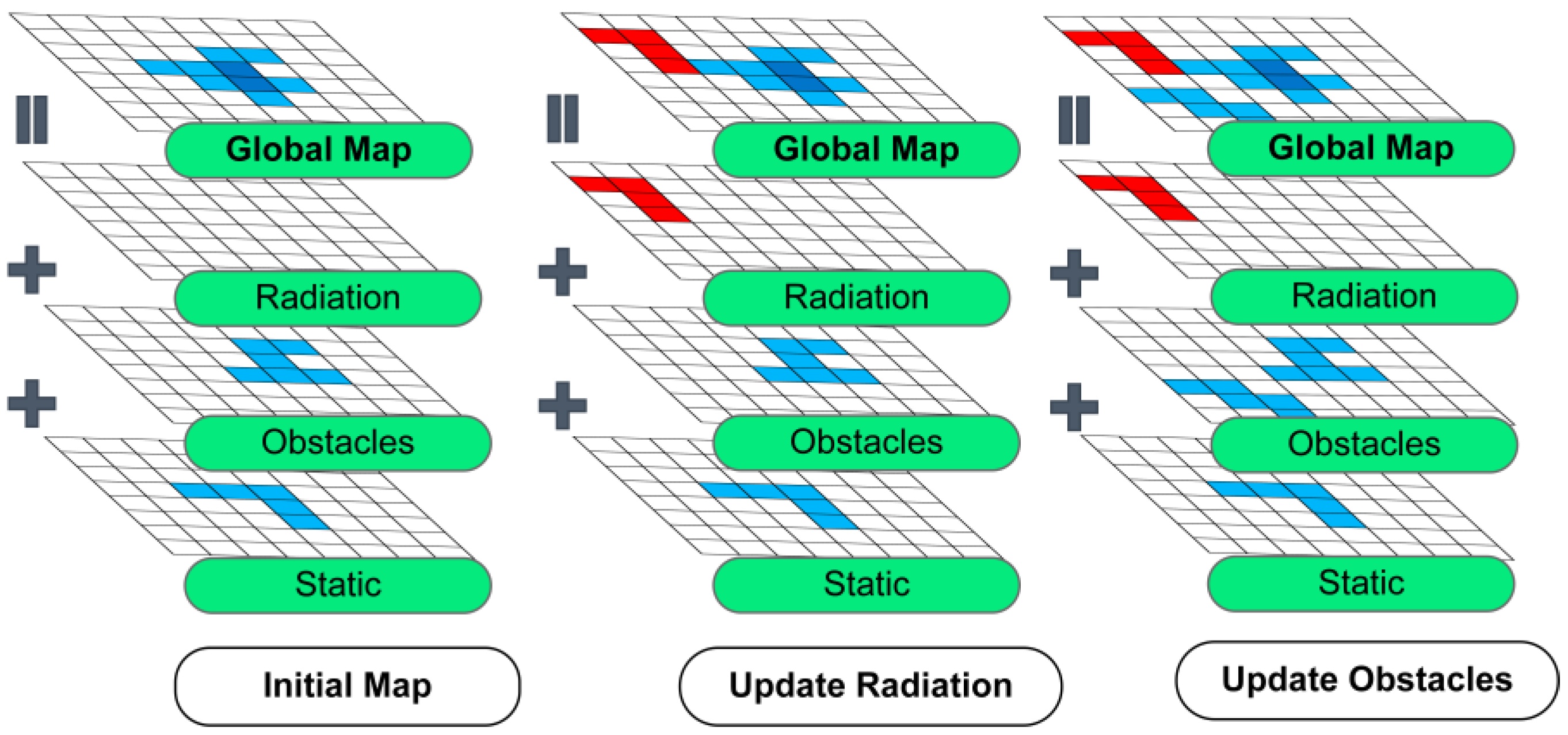
2.3. Methods
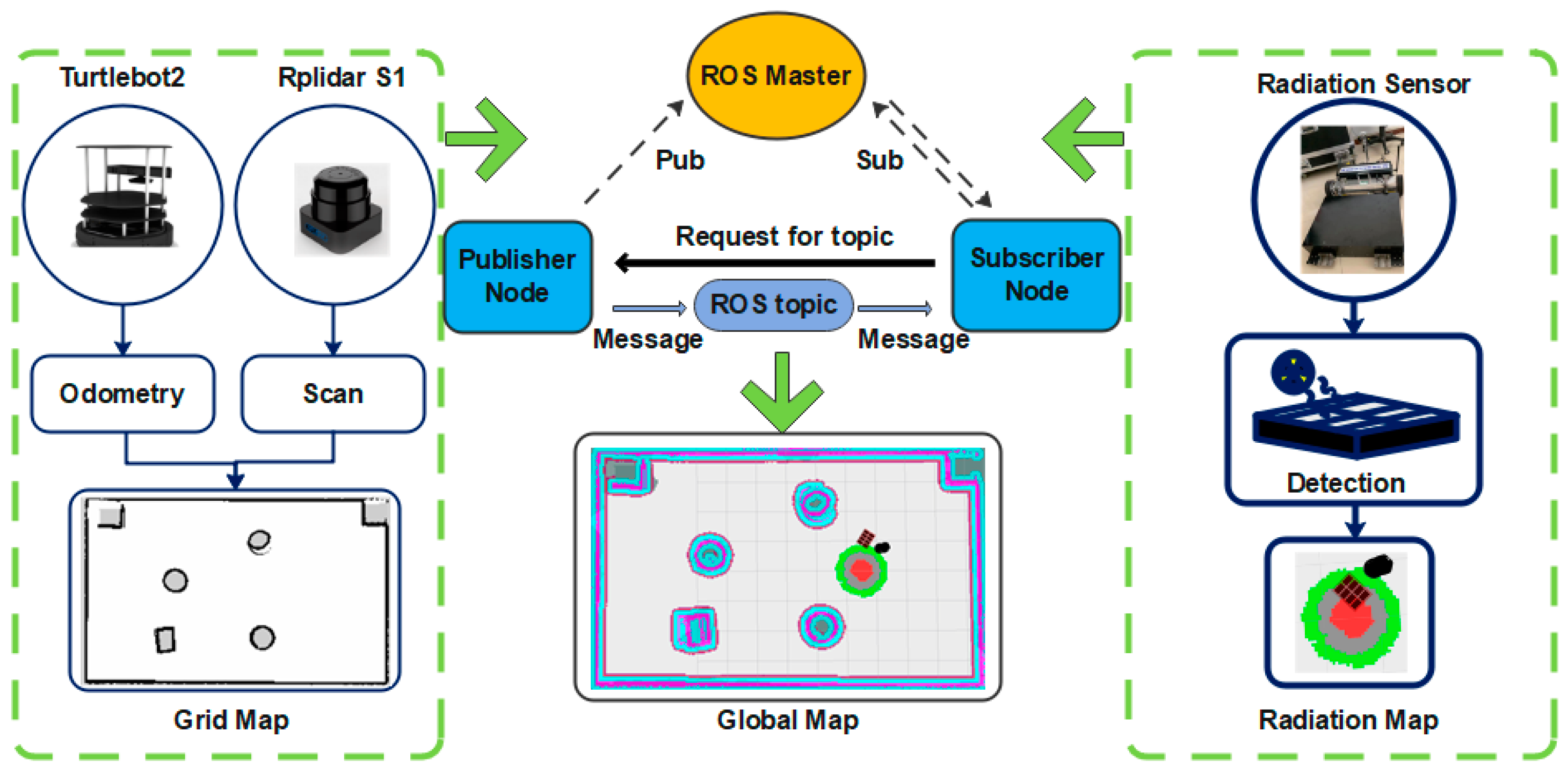
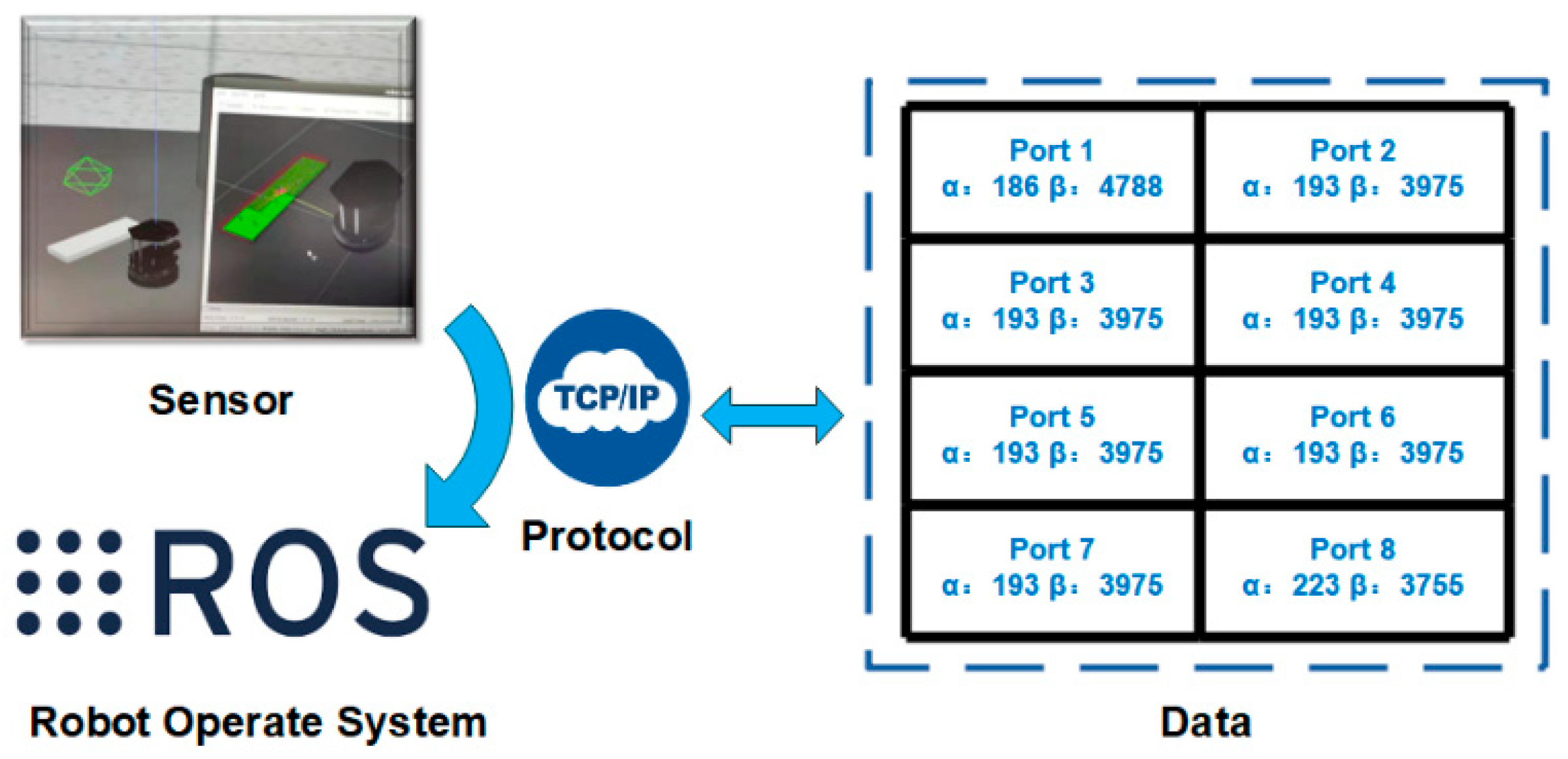
2.4. System Modeling in ROS
3. Experiments
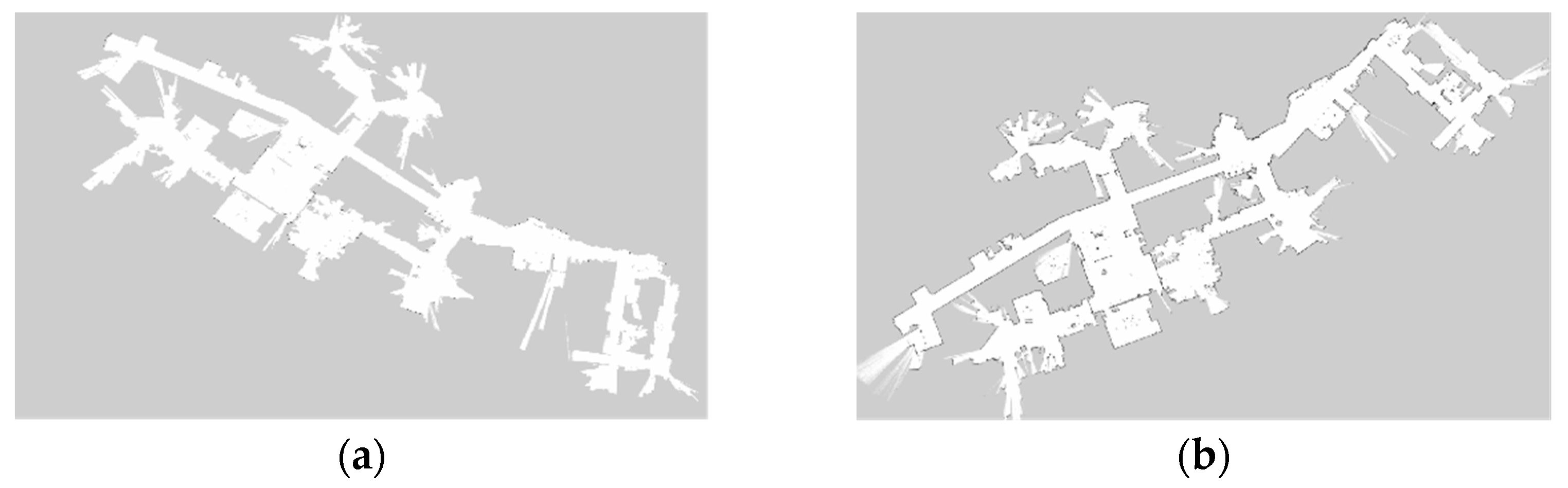
3.1. Comparison of Different SLAM Methods on a Public Dataset
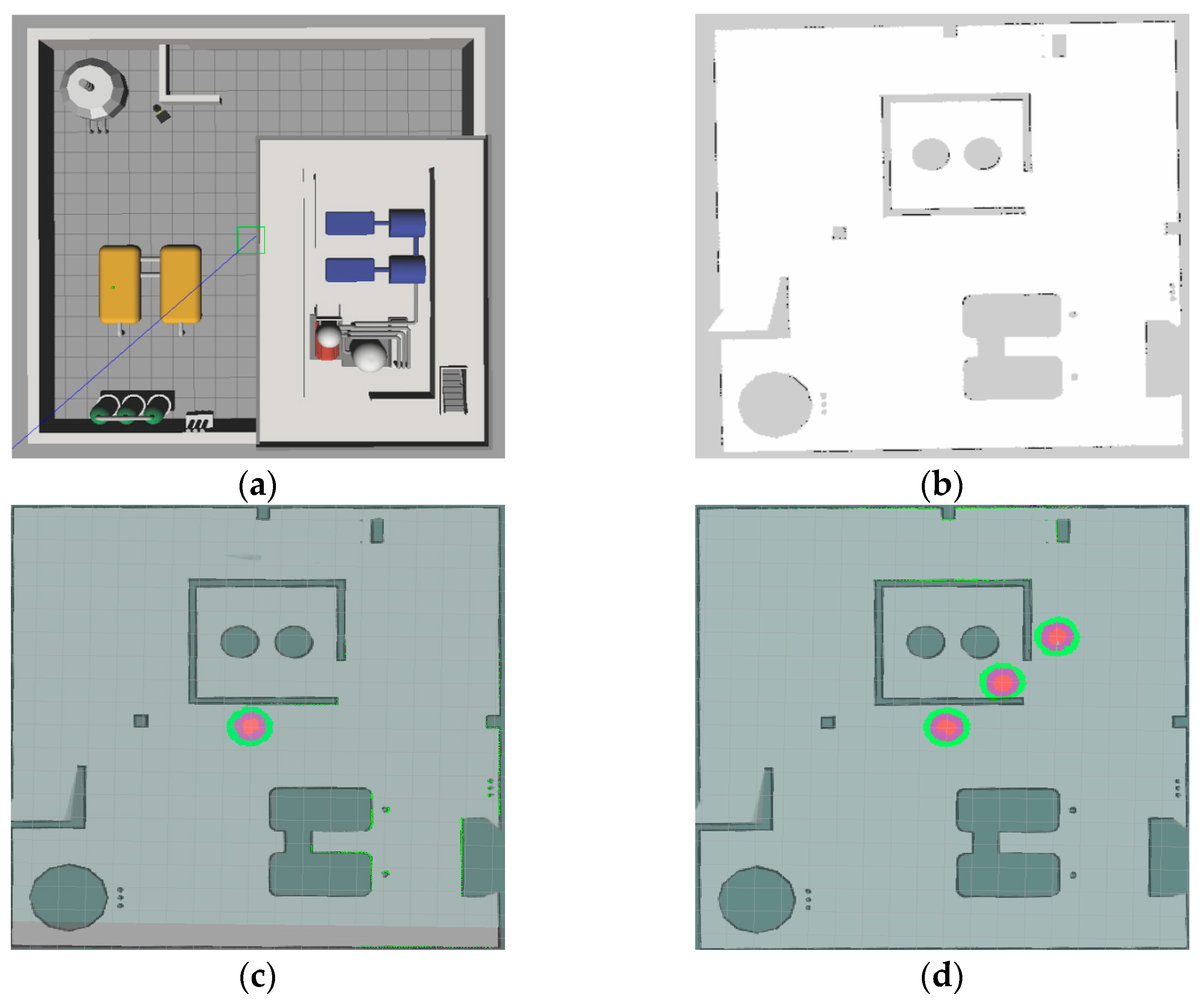
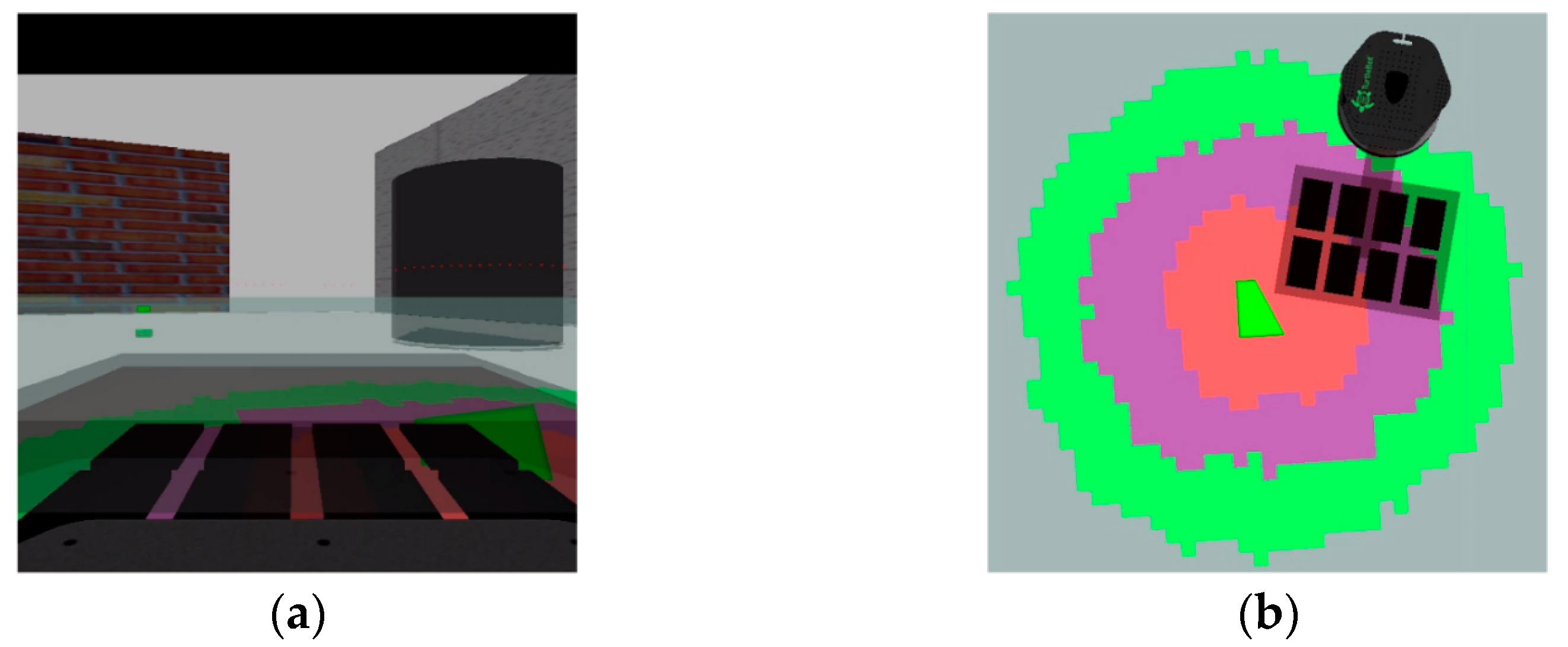
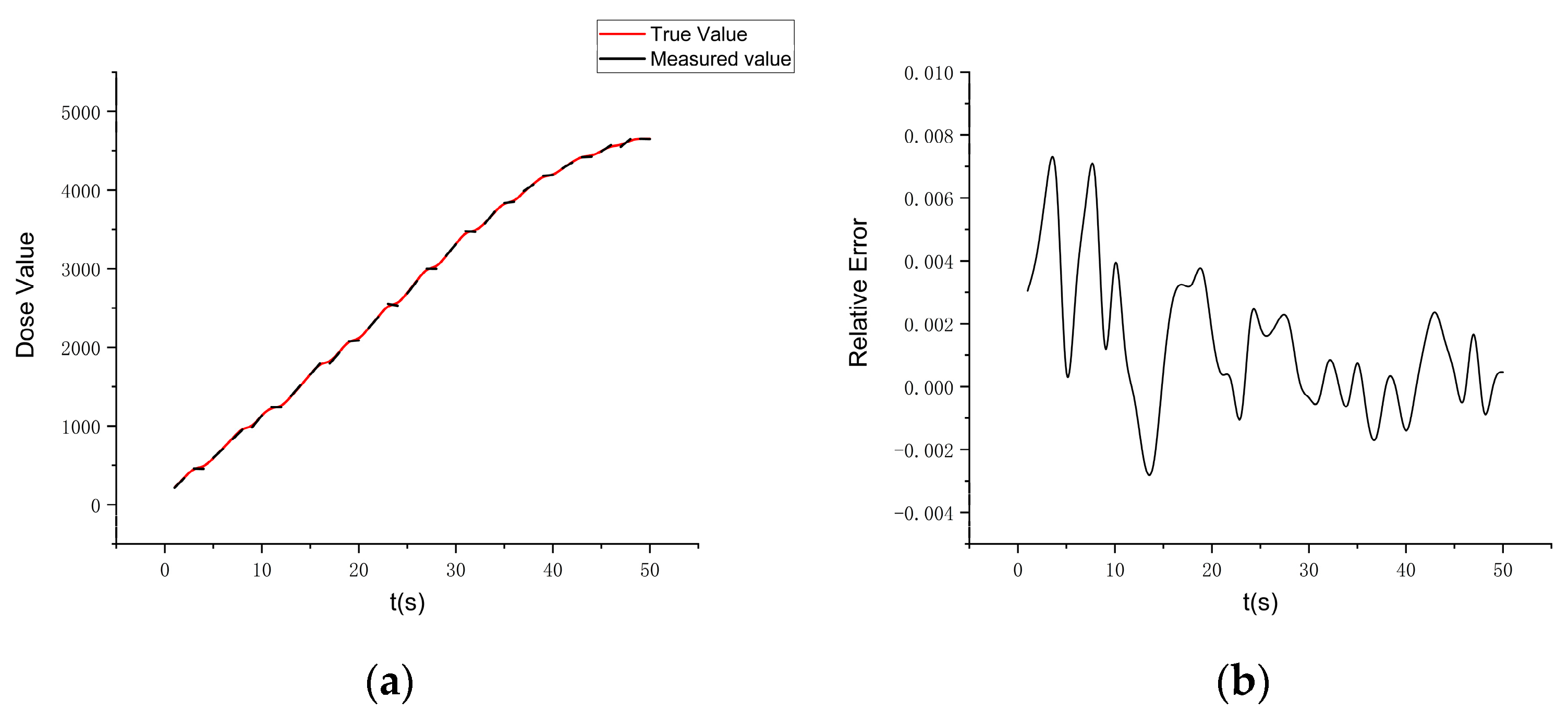
3.2. Radiation-Map-Fusion Results in the Simulation Environment
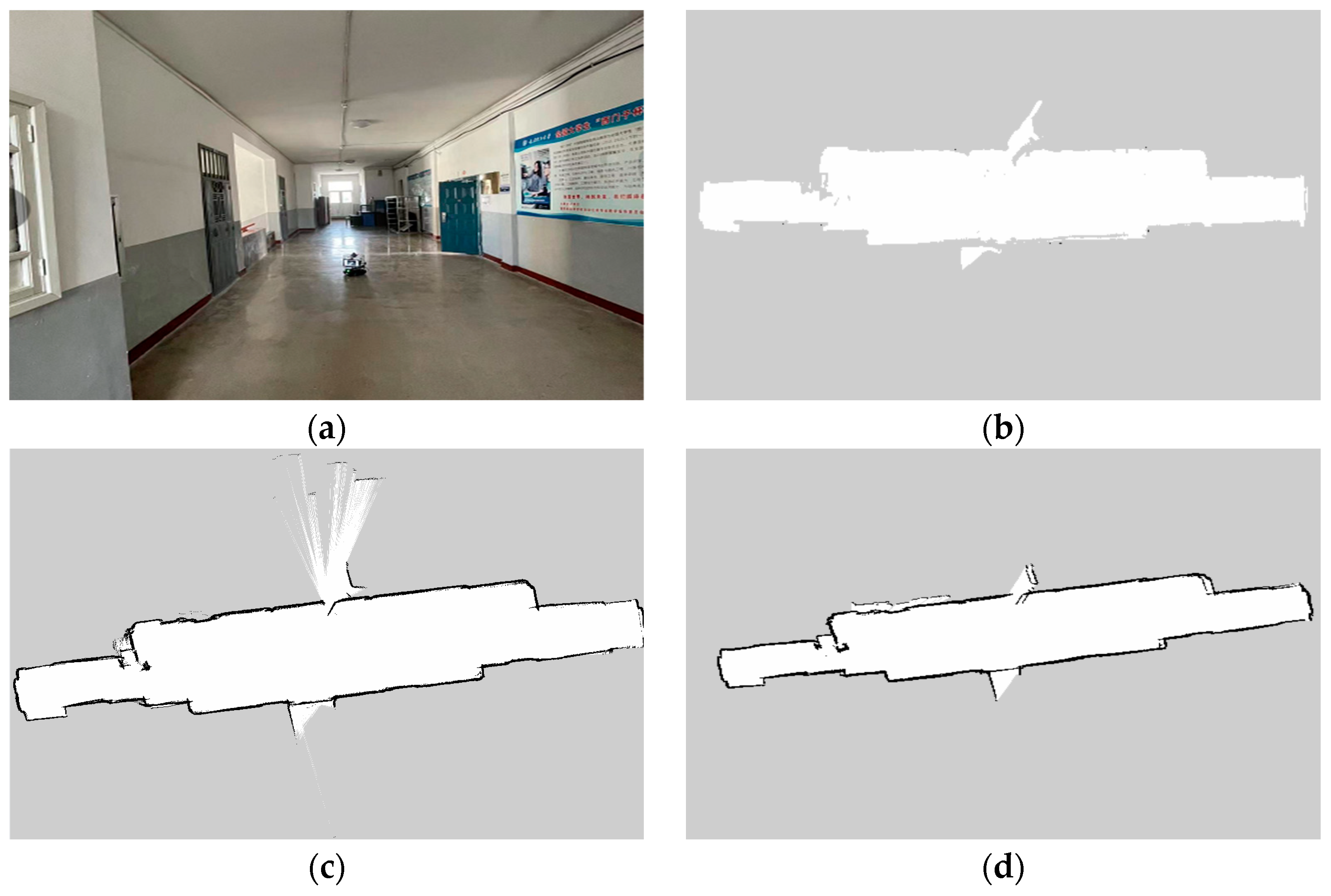
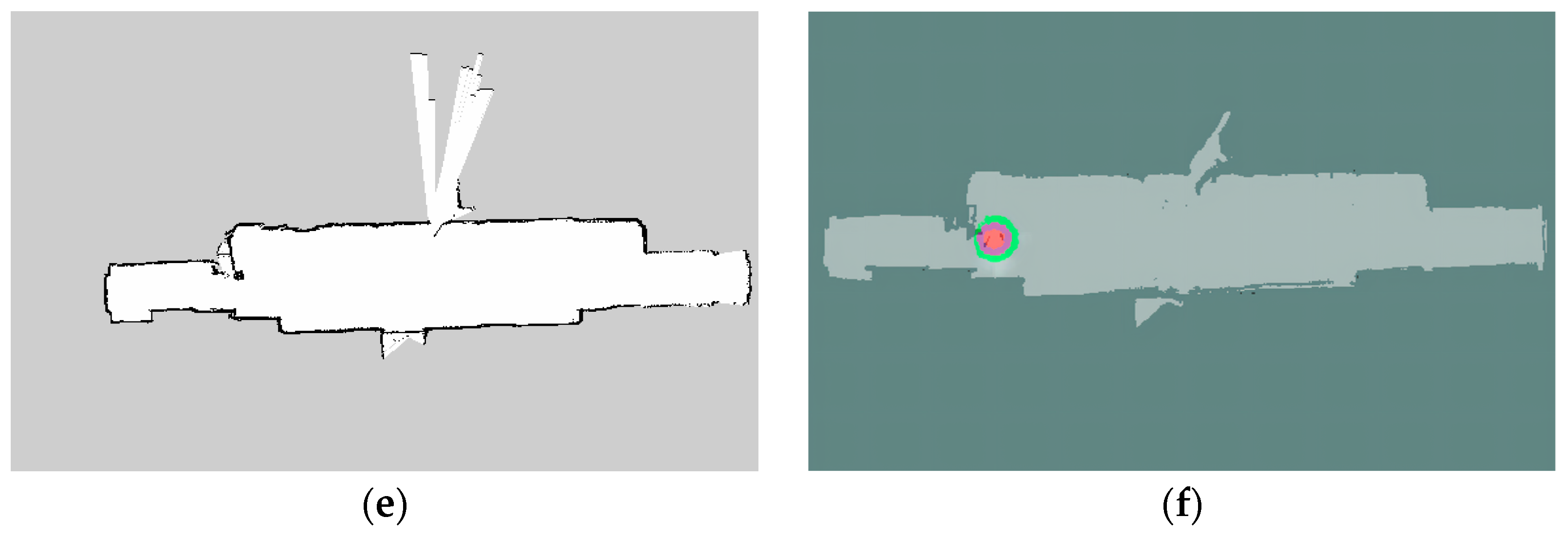
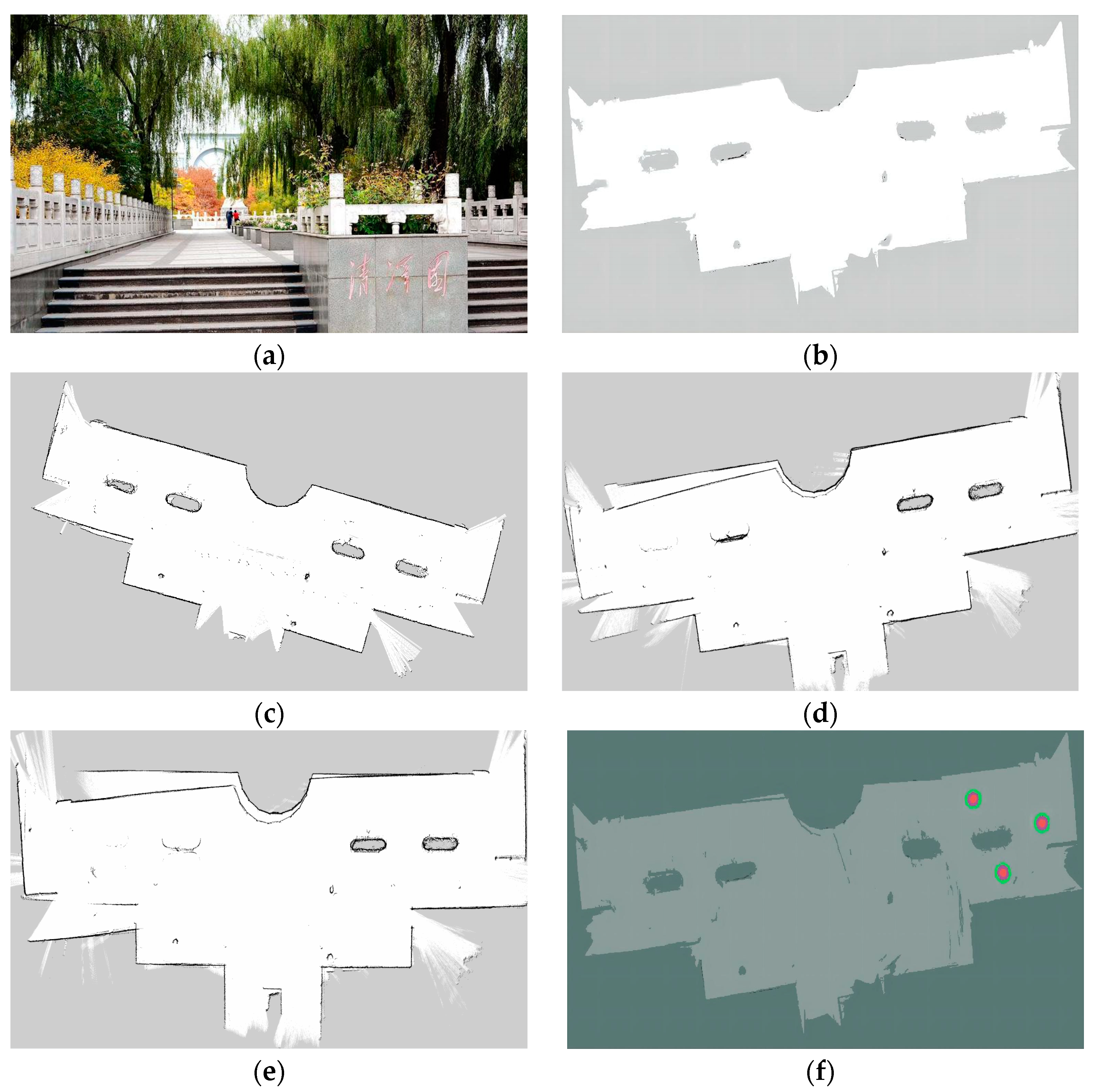
3.3. Radiation Map Fusion Results in the Real Environment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Smith, R.; Cucco, E.; Fairbairn, C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics 2020, 9, 94. [Google Scholar] [CrossRef]
- Amgarou, K.; Herranz, M. State-of-the-art and challenges of non-destructive techniques for in-situ radiological characterization of nuclear facilities to be dismantled. Nucl. Eng. Technol. 2021, 53, 3491–3504. [Google Scholar] [CrossRef]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Cheng, R.; Razani, R.; Ren, Y. S3net: 3d LiDAR sparse semantic segmentation network. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Lim, H.; Hwang, S.; Myung, H. ERASOR: Egocentric ratio of pseudo occupancy-based dynamic object removal for static 3D point cloud map building. IEEE Robot. Autom. Lett. 2021, 6, 2272–2279. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, C.; Zhang, W.; Fang, C.; Xia, Y.; Liu, Y.; Dong, H. Object-Based Reliable Visual Navigation for Mobile Robot. Sensors 2022, 22, 2387. [Google Scholar] [CrossRef] [PubMed]
- Xiao, S.; Tan, X.; Wang, J. A simulated annealing algorithm and grid map-based UAV coverage path planning method for 3D reconstruction. Electronics 2021, 10, 853. [Google Scholar] [CrossRef]
- Moravec, H.; Elfes, A. High resolution maps from wide angle sonar. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation (ICRA), St. Louis, MO, USA, 25–28 March 1985. [Google Scholar]
- Ge, G.; Zhang, Y.; Wang, W.; Jiang, Q.; Hu, L.; Wang, Y. Text-MCL: Autonomous Mobile Robot Localization in Similar Environment Using Text-Level Semantic Information. Machines 2022, 10, 169. [Google Scholar] [CrossRef]
- Chen, C.S.; Lin, C.J.; Lai, C.C.; Lin, S.Y. Velocity Estimation and Cost Map Generation for Dynamic Obstacle Avoidance of ROS Based AMR. Machines 2022, 10, 501. [Google Scholar] [CrossRef]
- Amigoni, F.; Castelli, V.; Luperto, M. Improving repeatability of experiments by automatic evaluation of SLAM algorithms. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar] [CrossRef]
- Abdelrasoul, Y.; Saman, A.B.S.H.; Sebastian, P. A quantitative study of tuning ROS gmapping parameters and their effect on performing indoor 2D SLAM. In Proceedings of the 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Ipoh, Malaysia, 25–27 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Doucet, A.; Freitas, N.D.; Murphy, K. Rao-Blackwellised Particle Filtering for Dynamic Bayesian Networks. In Sequential Monte Carlo Methods in Practice; Springer: New York, NY, USA, 2001; pp. 499–515. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Asharif, M.R.; Moshiri, B.; Hoseinnezhad, R. Sensor fusion by pseudo information measure: A mobile robot application. ISA Trans. 2002, 41, 283–301. [Google Scholar] [CrossRef]
- Besada-Portas, E.; Lopez-Orozco, J.A.; Besada, J. Multisensor fusion for linear control systems with asynchronous, Out-Of-Sequence and erroneous data. Autom. J. IFAC 2011, 47, 1399–1408. [Google Scholar] [CrossRef]
- Chachua, K.; Nowak, R.; Solano, F. Pollution Source Localization in Wastewater Networks. Sensors 2021, 21, 826. [Google Scholar] [CrossRef]
- Vetter, K.; Barnowski, R.; Cates, J.W. Advances in Nuclear Radiation Sensing: Enabling 3-D Gamma-Ray Vision. Sensors 2019, 19, 2541. [Google Scholar] [CrossRef] [PubMed]
- Sharma, M.K.; Alajo, A.B.; Lee, H.K. Three-dimensional localization of low activity gamma-ray sources in real-time scenarios. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2016, 813, 132–138. [Google Scholar] [CrossRef]
- Gunatilaka, A.; Ristic, B.; Gailis, R. Radiological Source Localisation. Published by DSTO Defence Science and Technology Organisation, Australia. Available online: http://www.dsto.defence.gov.au/corporate/reports/DSTO_TR_1988.pdf (accessed on 1 July 2007).
- Cho, H.S.; Woo, T.H. Mechanical analysis of flying robot for nuclear safety and security control by radiological monitoring. Ann. Nucl. Energy 2016, 94, 138–143. [Google Scholar] [CrossRef]
- Morelande, M.; Ristic, B.; Gunatilaka, A. Detection and parameter estimation of multiple radioactive sources. In Proceedings of the 10th International Conference on Information Fusion, Quebec, AB, Canada, 9–12 July 2007; pp. 1–7. [Google Scholar]
- Meutter, P.D.; Hoffma, I. Bayesian source reconstruction of an anomalous Selenium-75 release at a nuclear research institute. J. Environ. Radioact. 2020, 218, 1062259. [Google Scholar] [CrossRef]
- Pgm, A.; Sk, B.; Ntsb, E. 3D unmanned aerial vehicle radiation mapping for assessing contaminant distribution and mobility. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 12–19. [Google Scholar] [CrossRef]
- Kawatsuma, S.; Mimura, R.; Asama, H. Unitization for portability of emergency response surveillance robot system: Experiences and lessons learned from the deployment of the JAEA-3 emergency response robot at the Fukushima Daiichi Nuclear Power Plants. Robomech J. 2017, 4, 1. [Google Scholar] [CrossRef]
- Nagatani, K.; Kiribayashi, S.; Okada, Y. Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- Ducros, C.; Hauser, G.; Mahjoubi, N. RICA: A Tracked Robot for Sampling and Radiological Characterization in the Nuclear Field. J. Field Robot. 2017, 34, 583–599. [Google Scholar] [CrossRef]
- Bird, B.; Griffiths, A.; Martin, H. A Robot to Monitor Nuclear Facilities: Using Autonomous Radiation-Monitoring Assistance to Reduce Risk and Cost. IEEE Robot. Autom. Mag. 2018, 26, 35–43. [Google Scholar] [CrossRef]
- Hou, L.; Liu, J.J.; Bai, N. Design of Surface Contamination Monitor. Nucl. Electron. Detect. Technol. 2018, 38, 485–490. [Google Scholar]
- Konolige, K.; Grisetti, G.; Kümmerle, R.; Burgard, W.; Limketkai, B.; Vincent, R. Efficient Sparse Pose Adjustment for 2D mapping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 22–29. [Google Scholar]
- Kohlbrecher, S.; von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable slam system with full 3D motion estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Lu, D.V.; Hershberger, D.; Smart, W.D. Layered costmaps for context-sensitive navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Fallon, M.; Johannsson, H.; Kaess, M.; Leonard, J.J. The MIT stata center dataset. Int. J. Robot. Res. 2013, 32, 1695–1699. [Google Scholar] [CrossRef]
- Rebecq, H.; Horstschäfer, T.; Gallego, G. Evo: A geometric approach to event-based 6-dof parallel tracking and mapping in real time. IEEE Robot. Autom. Lett. 2016, 2, 593–600. [Google Scholar] [CrossRef]
- Wright, T.; West, A.; Licata, M. Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges. Robotics 2021, 10, 86. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Full Name |
|---|---|
| LiDAR | Light detection and ranging |
| SLAM | Simultaneous localization and mapping |
| IMU | Inertial measurement unit |
| LAMP | Scene-data fusion |
| SPA | Sparse pose adjustment |
| BBS | Branch-and-bound scan matching |
| TCP/IP | Transmission control protocol/internet protocol |
| RMSE | Root mean square error |
| TF | Transform frame |
| ROS | Robot operating system |
| STD | Standard deviation |
| SSE | Sum of squares error |
| APE | Absolute trajectory error |
| Performance | Parameters |
|---|---|
| Measured energy range | a > 2.5 MeV, β > 100 keV |
| Detection efficiency | a: ≥ 25%(Am-241); β: ≥ 30%(Sr-90/Y-90) |
| Effective area | 10 × 17cm2 × 8 |
| Operating efficiency | ≥3 m2/min |
| RMSE (m) | MEAN (m) | MEDIAN (m) | STD (m) | MIN (m) | MAX (m) | SSE (m) | |
|---|---|---|---|---|---|---|---|
| Cartographer | 0.318046 | 0.244296 | 0.141310 | 0.20365 | 0 | 0.85211 | 2739.224 |
| Gmapping | 0.478861 | 0.444957 | 0.396801 | 0.176978 | 0 | 1.01641 | 6209.652 |
| Karto_SLAM | 0.816053 | 0.636724 | 0.427567 | 0.510436 | 0 | 1.65461 | 18188.1 |
| Hector_SLAM | 1.33959 | 1.14667 | 1.20988 | 0.692579 | 0 | 2.80609 | 49009.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Cheng, L.; Yang, Y.; Yan, G.; Xu, X.; Zhang, Z. An Alpha/Beta Radiation Mapping Method Using Simultaneous Localization and Mapping for Nuclear Power Plants. Machines 2022, 10, 800. https://doi.org/10.3390/machines10090800
Liu X, Cheng L, Yang Y, Yan G, Xu X, Zhang Z. An Alpha/Beta Radiation Mapping Method Using Simultaneous Localization and Mapping for Nuclear Power Plants. Machines. 2022; 10(9):800. https://doi.org/10.3390/machines10090800
Chicago/Turabian StyleLiu, Xin, Lan Cheng, Yapeng Yang, Gaowei Yan, Xinying Xu, and Zhe Zhang. 2022. "An Alpha/Beta Radiation Mapping Method Using Simultaneous Localization and Mapping for Nuclear Power Plants" Machines 10, no. 9: 800. https://doi.org/10.3390/machines10090800
APA StyleLiu, X., Cheng, L., Yang, Y., Yan, G., Xu, X., & Zhang, Z. (2022). An Alpha/Beta Radiation Mapping Method Using Simultaneous Localization and Mapping for Nuclear Power Plants. Machines, 10(9), 800. https://doi.org/10.3390/machines10090800