

Optimization Design of Aspect Ratio and Solidity of a Heavy-Duty Gas Turbine Transonic Compressor Rotor

Abstract
:1. Introduction
2. Optimization Methods
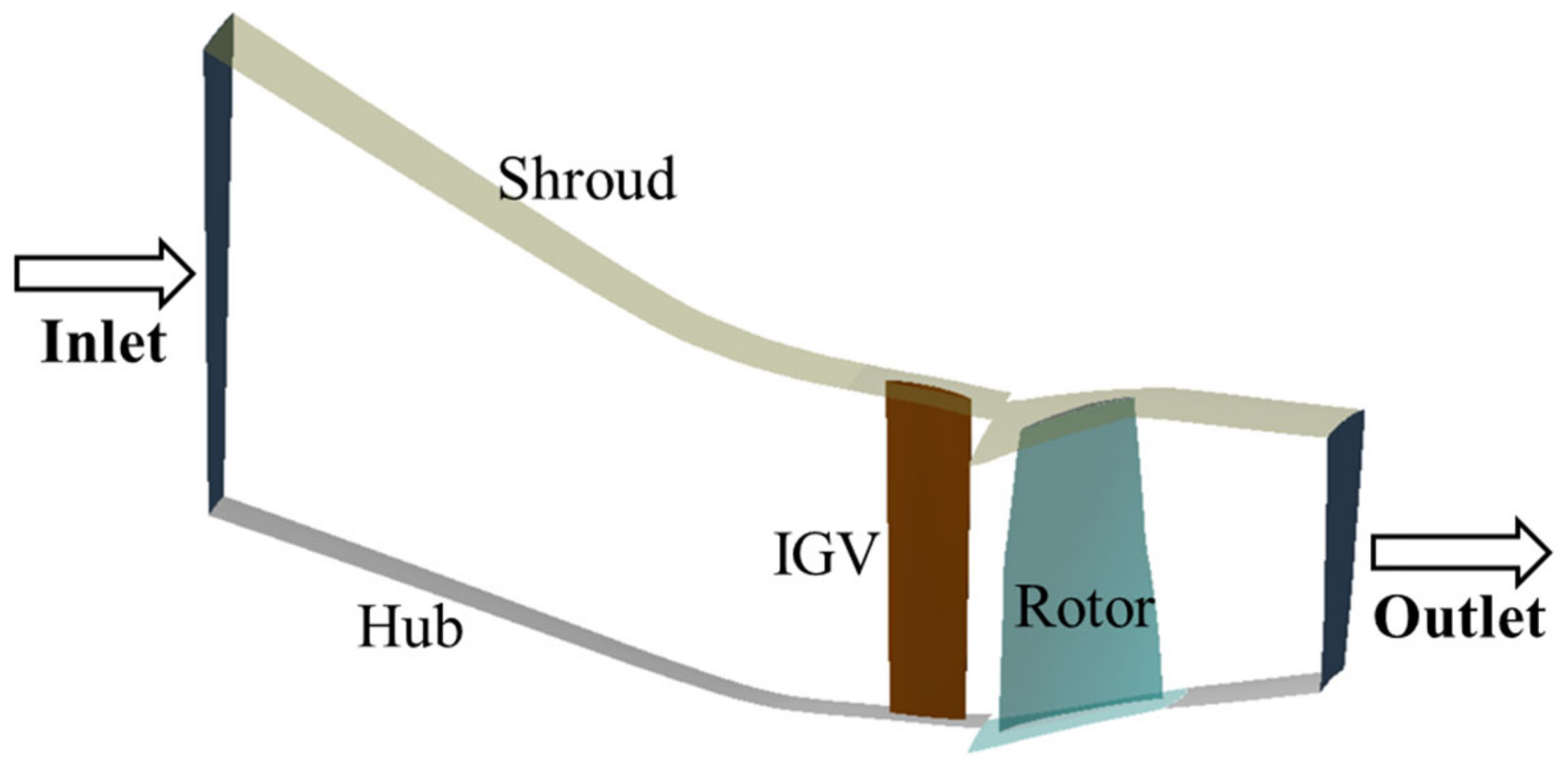
2.1. Research Object
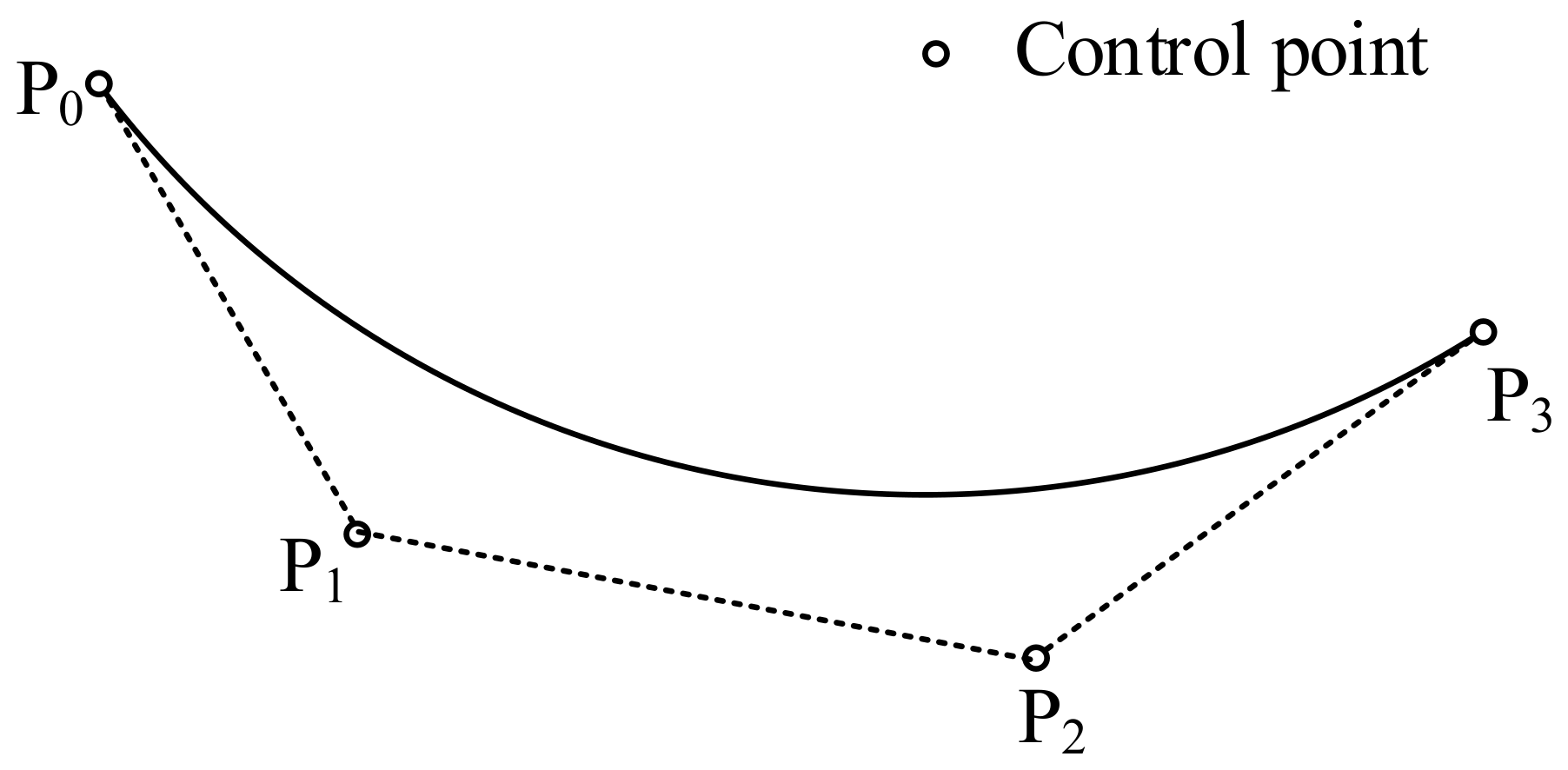
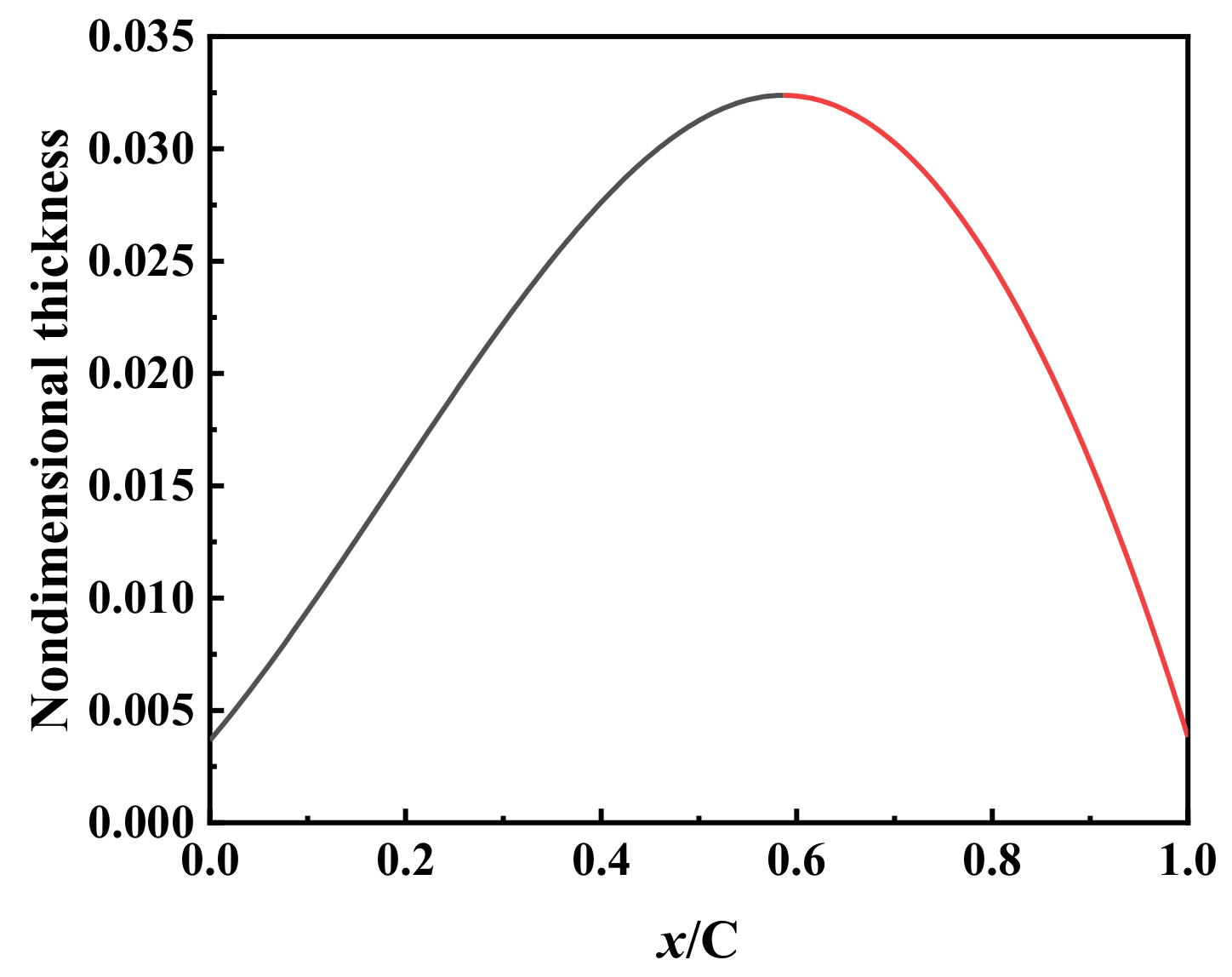
2.2. Parameterization Method
2.3. Optimization Objective
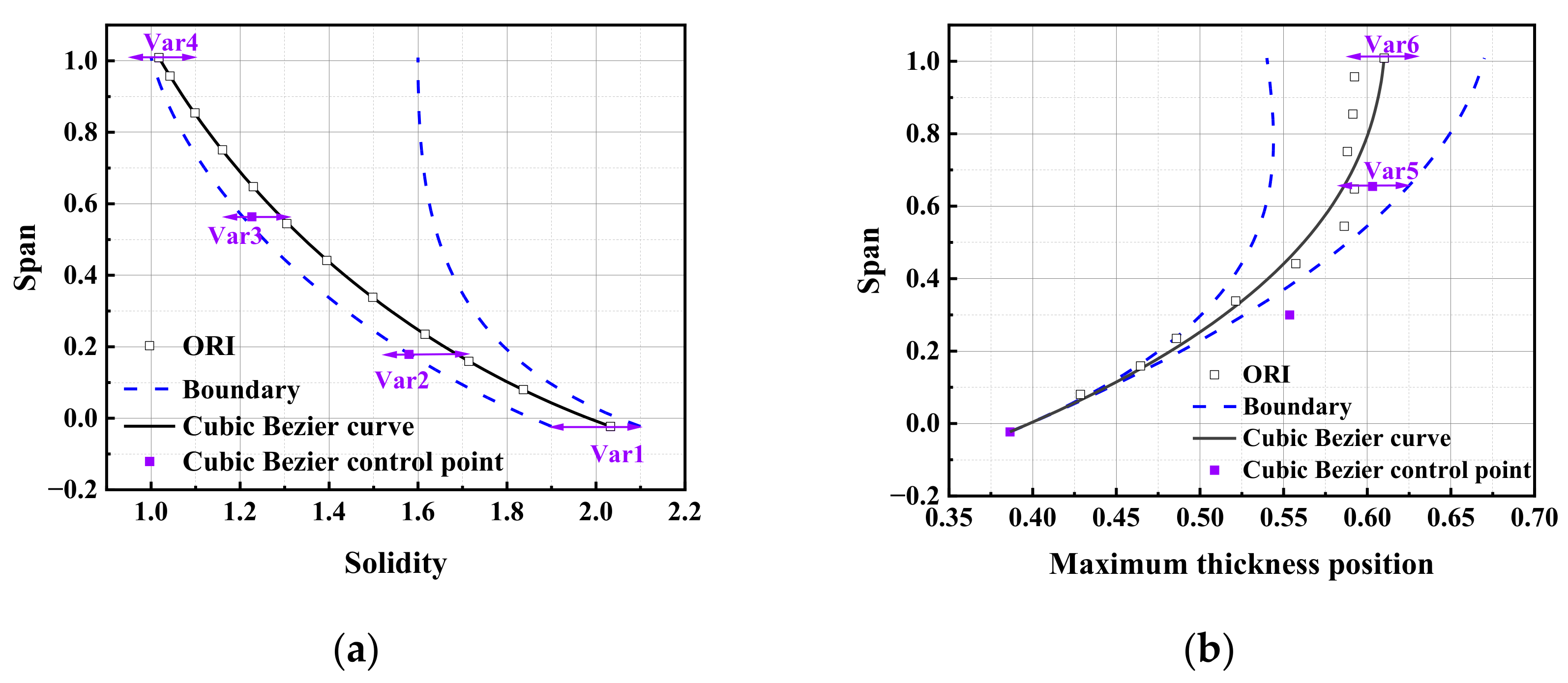
2.4. Optimization Variables
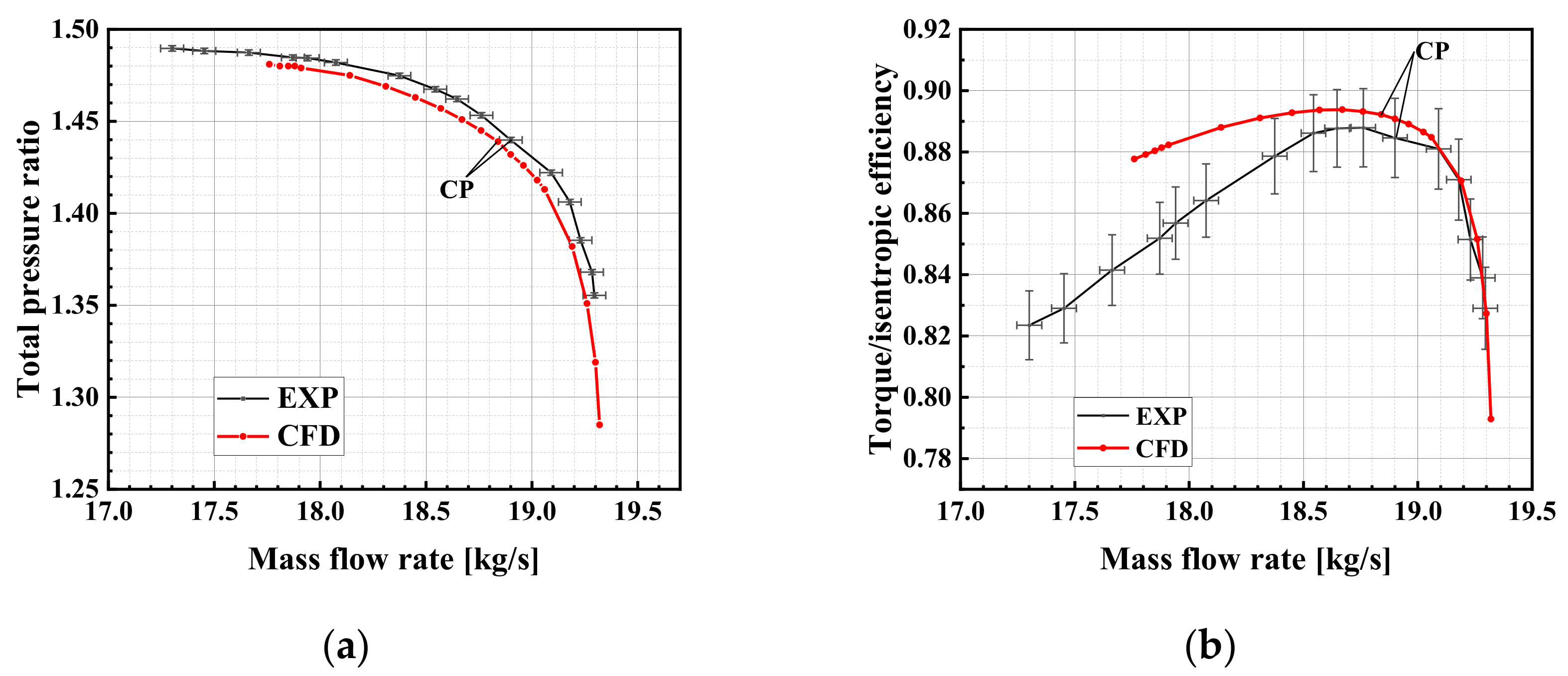
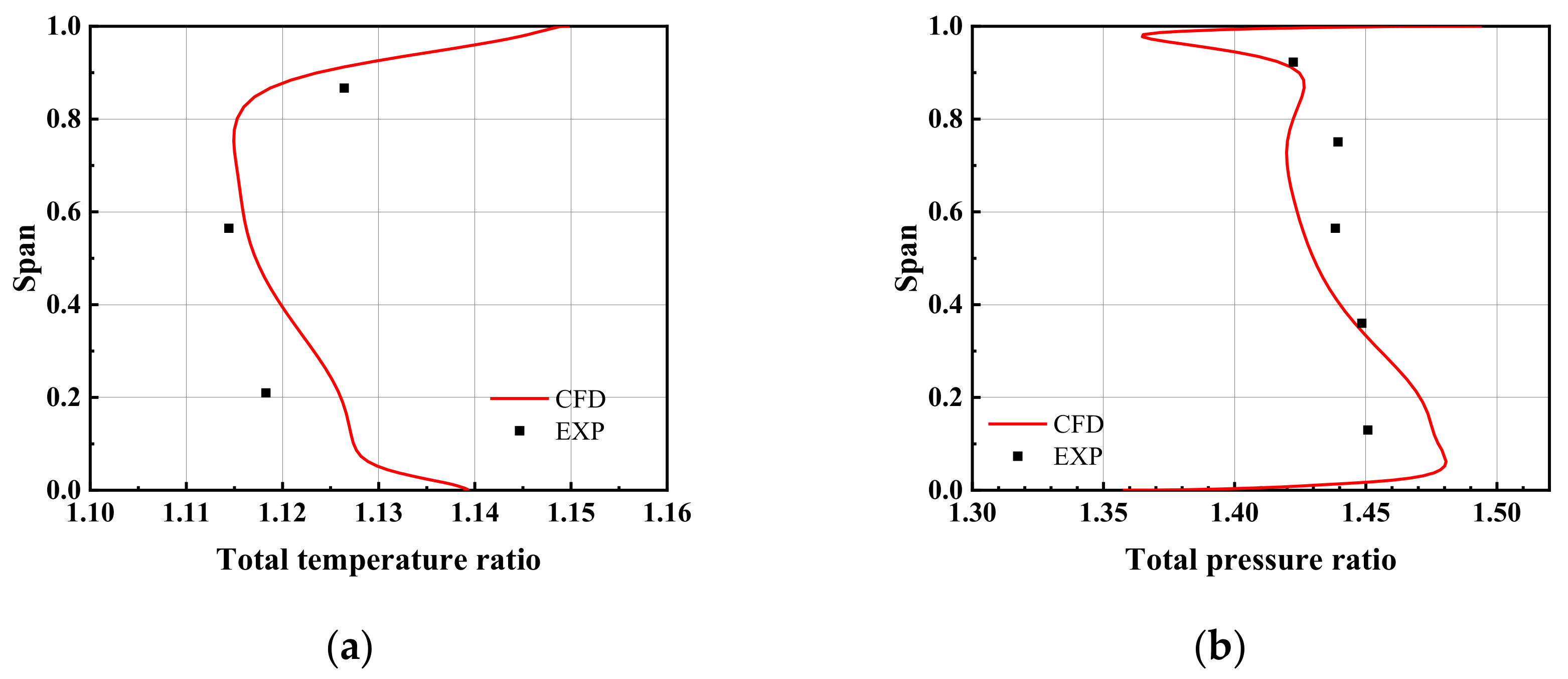
2.5. Numerical Calculation Method
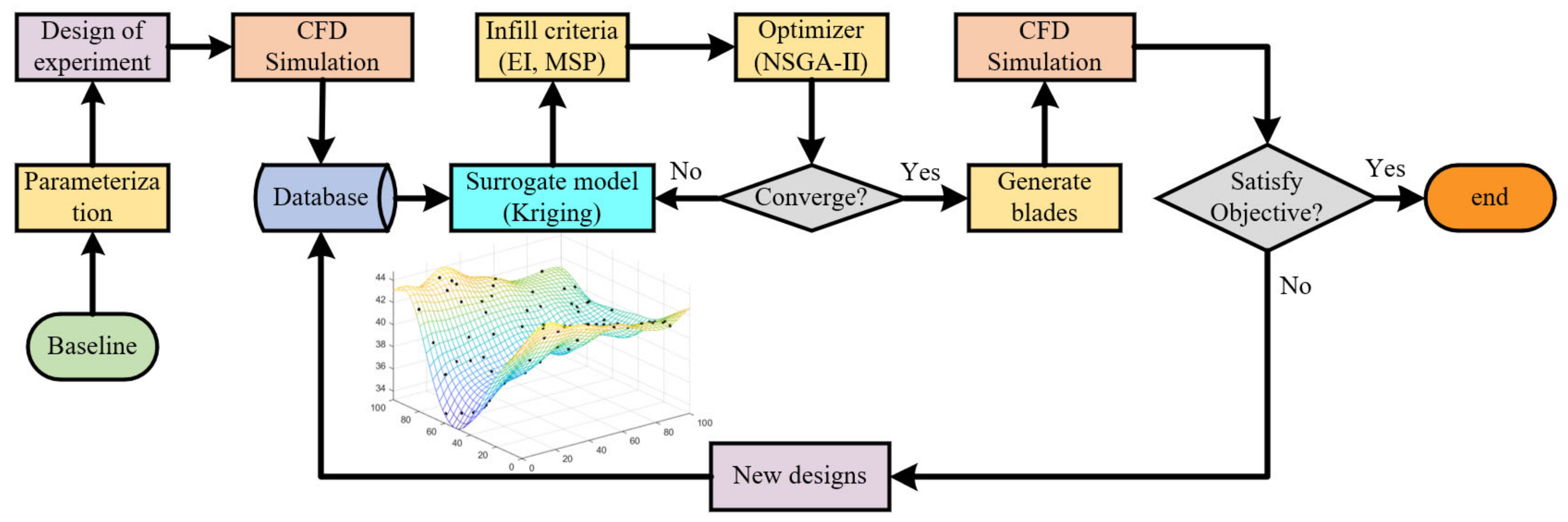
2.6. Aerodynamic Optimization Method
3. Results
4. Discussion
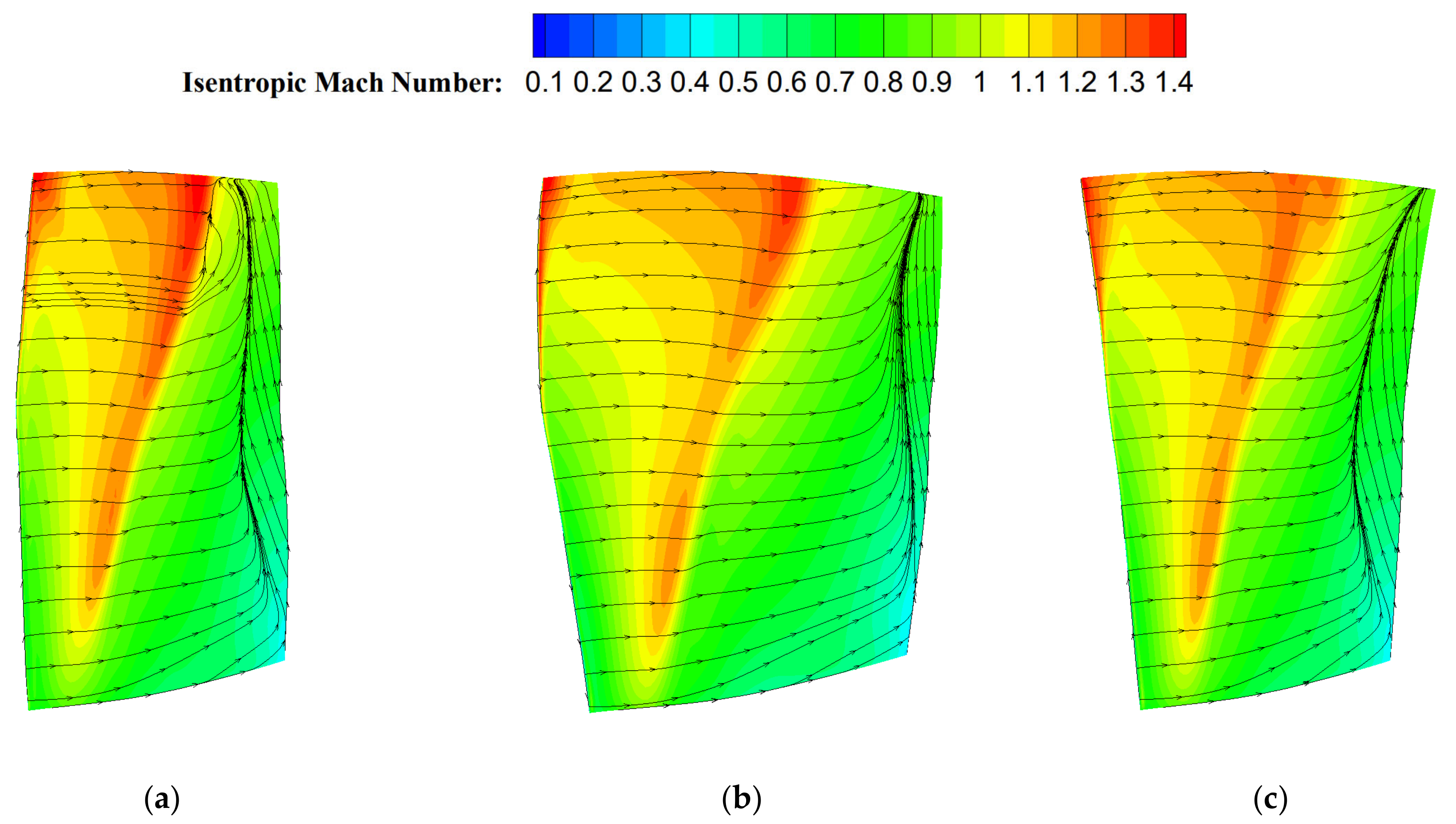
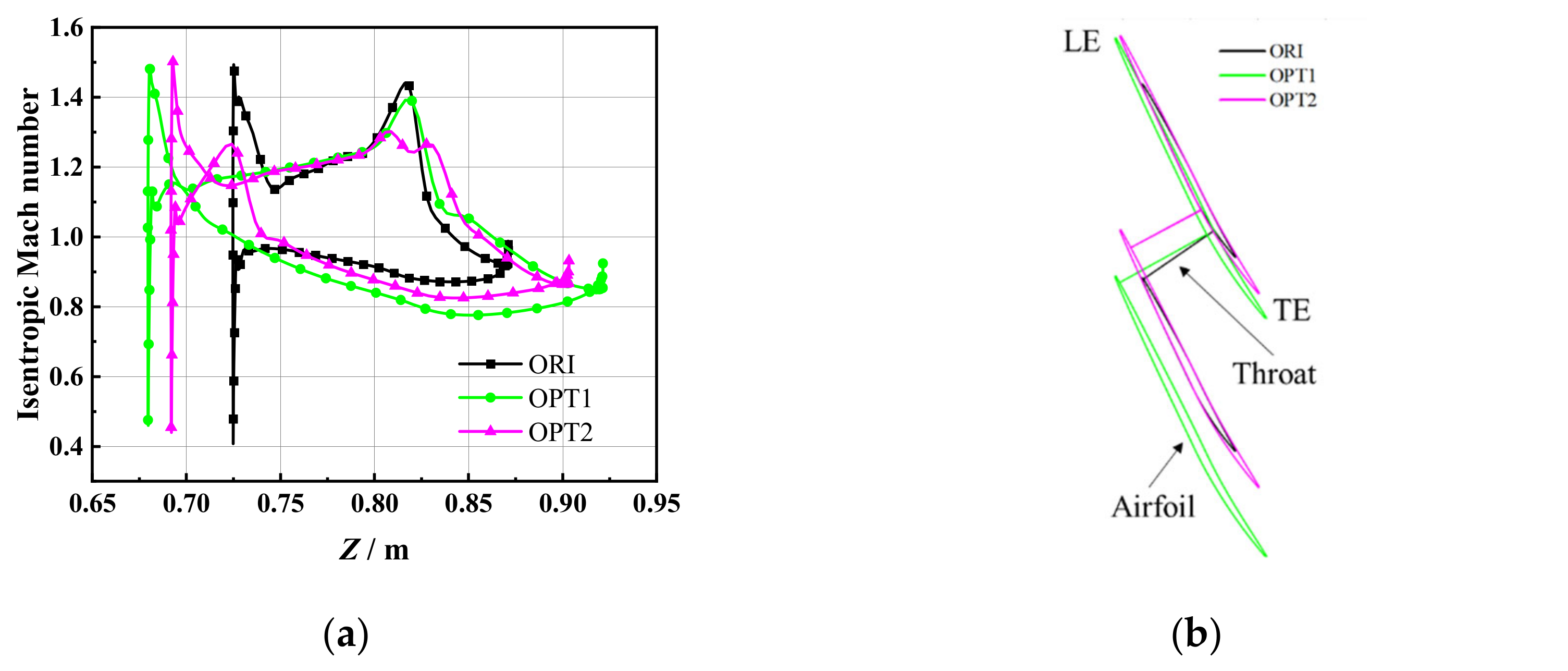
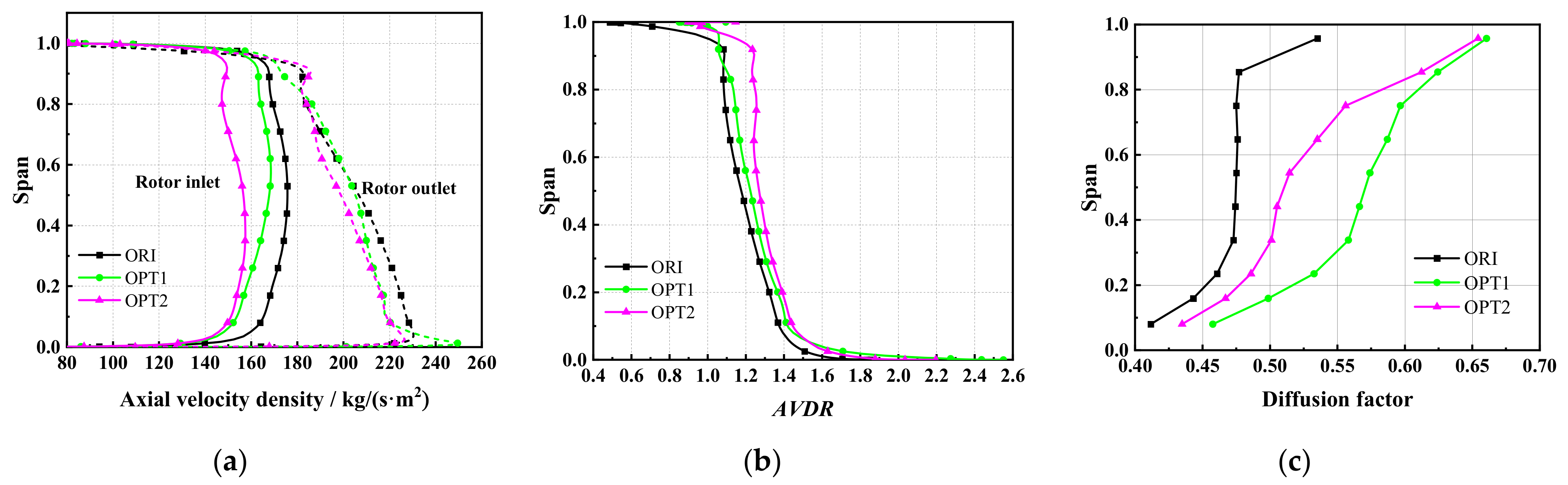
4.1. Flow Field Analysis
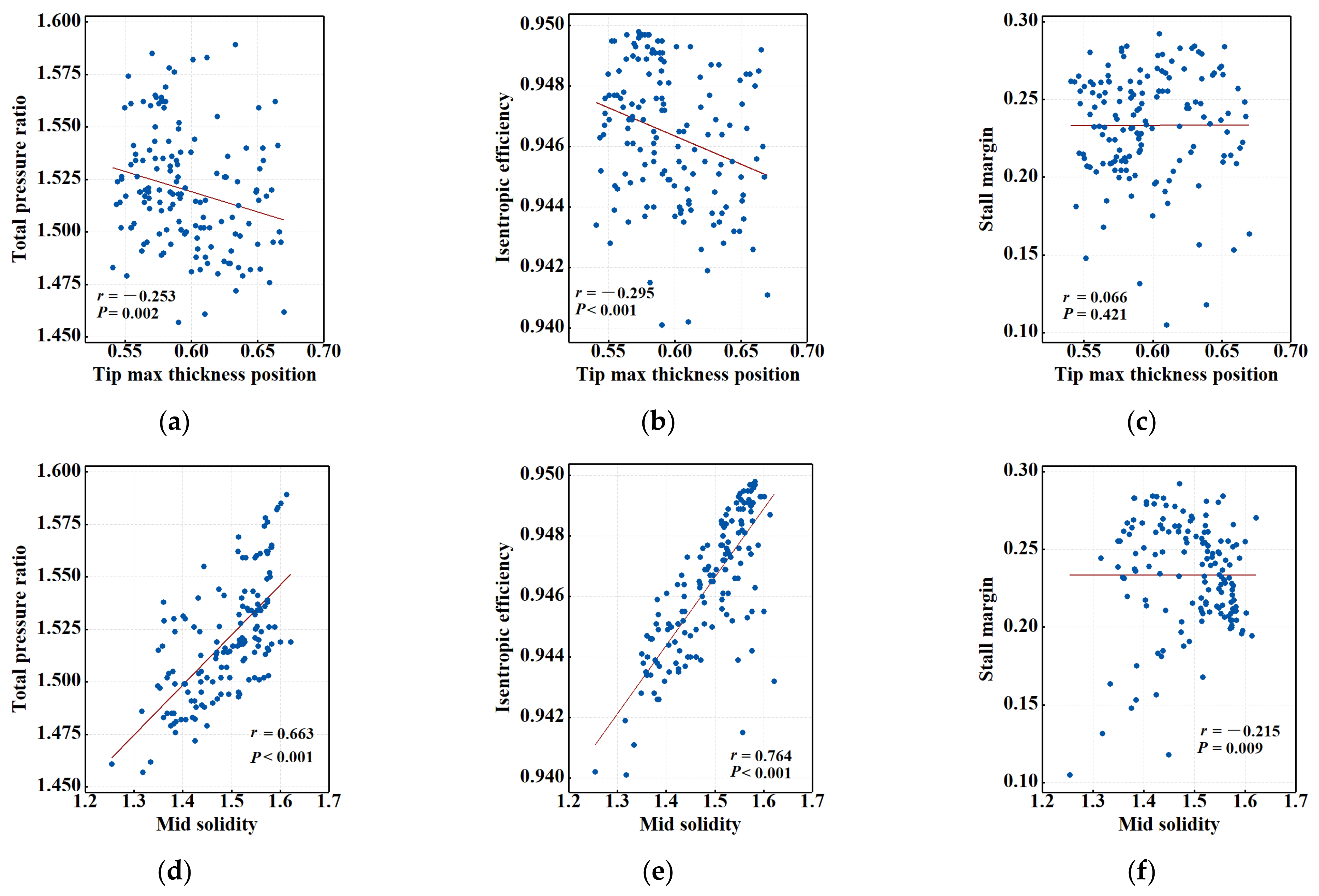
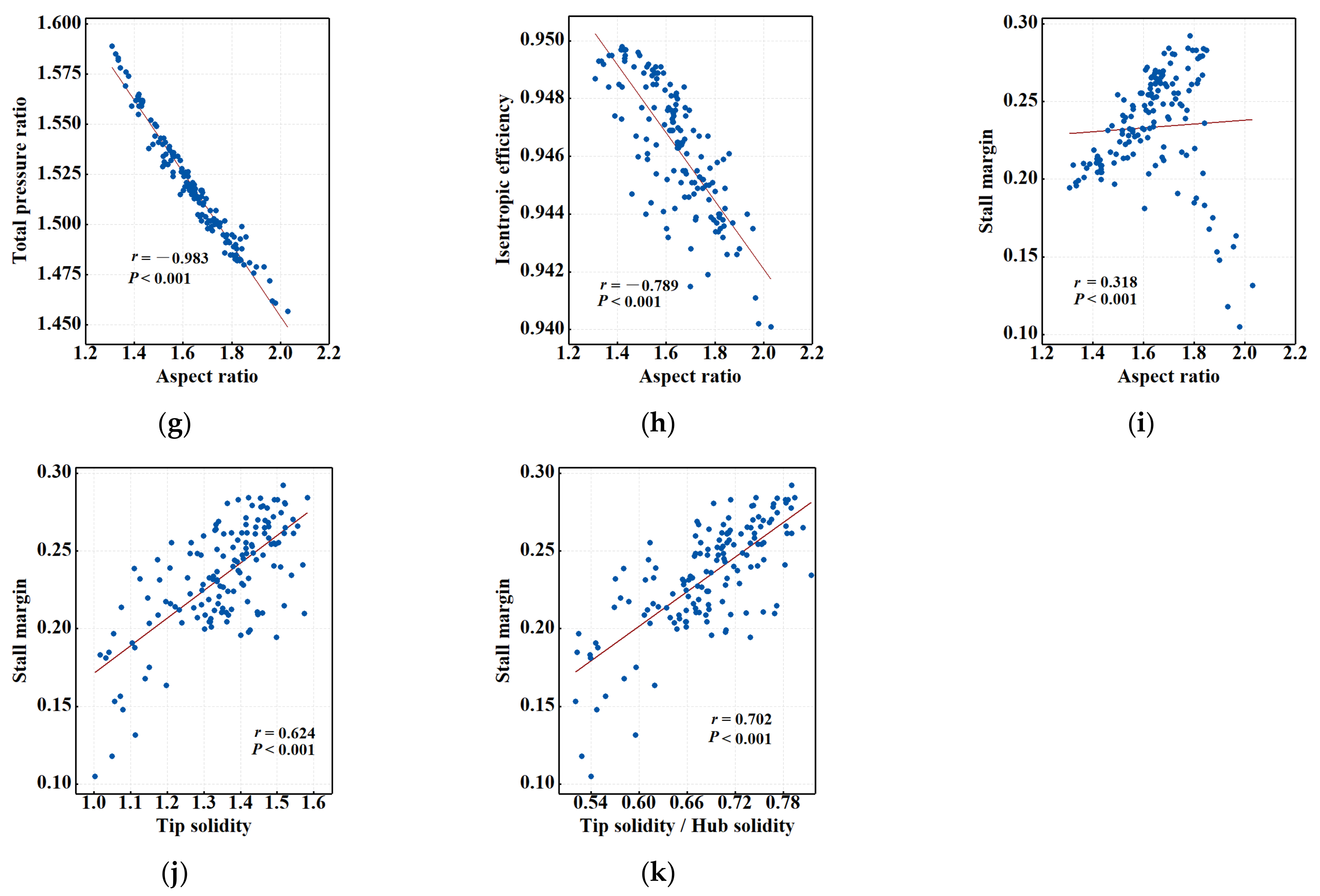
4.2. Parameter Sensitivity Analysis
5. Conclusions
- (1)
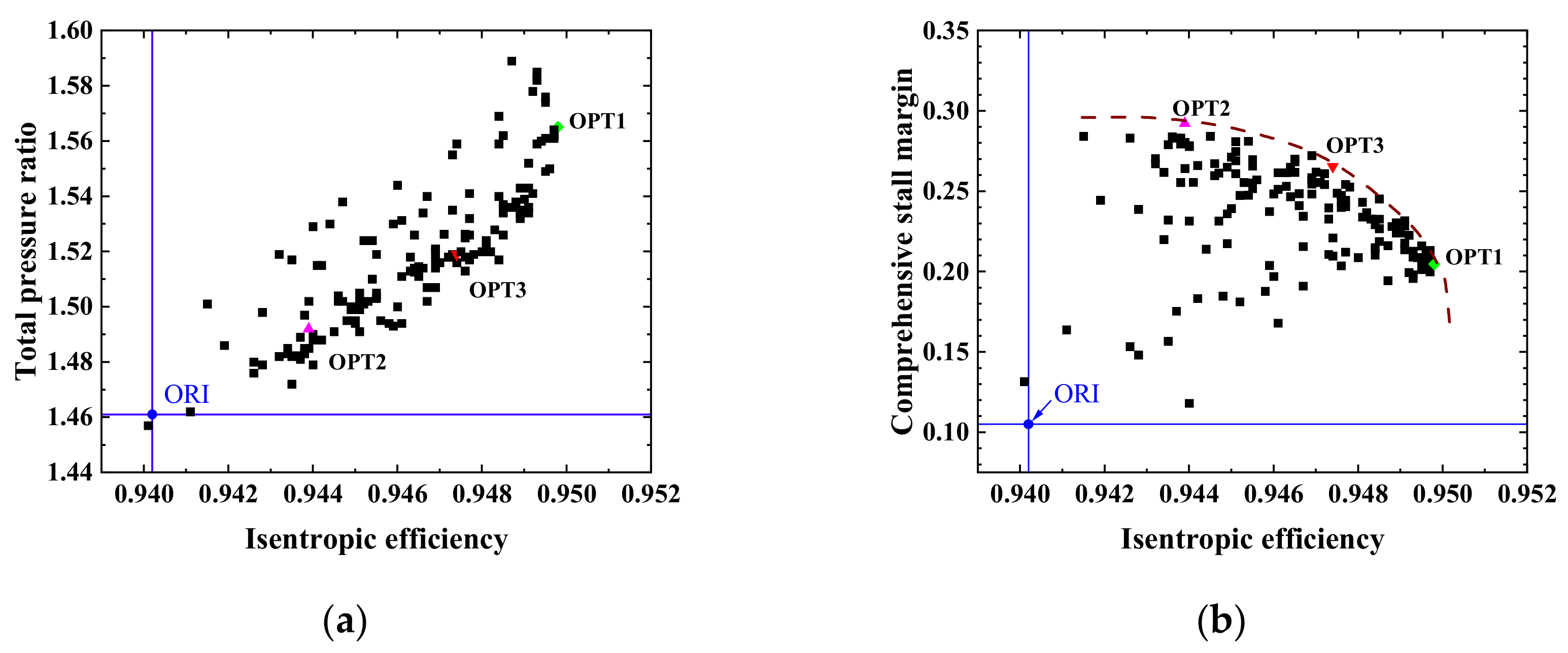
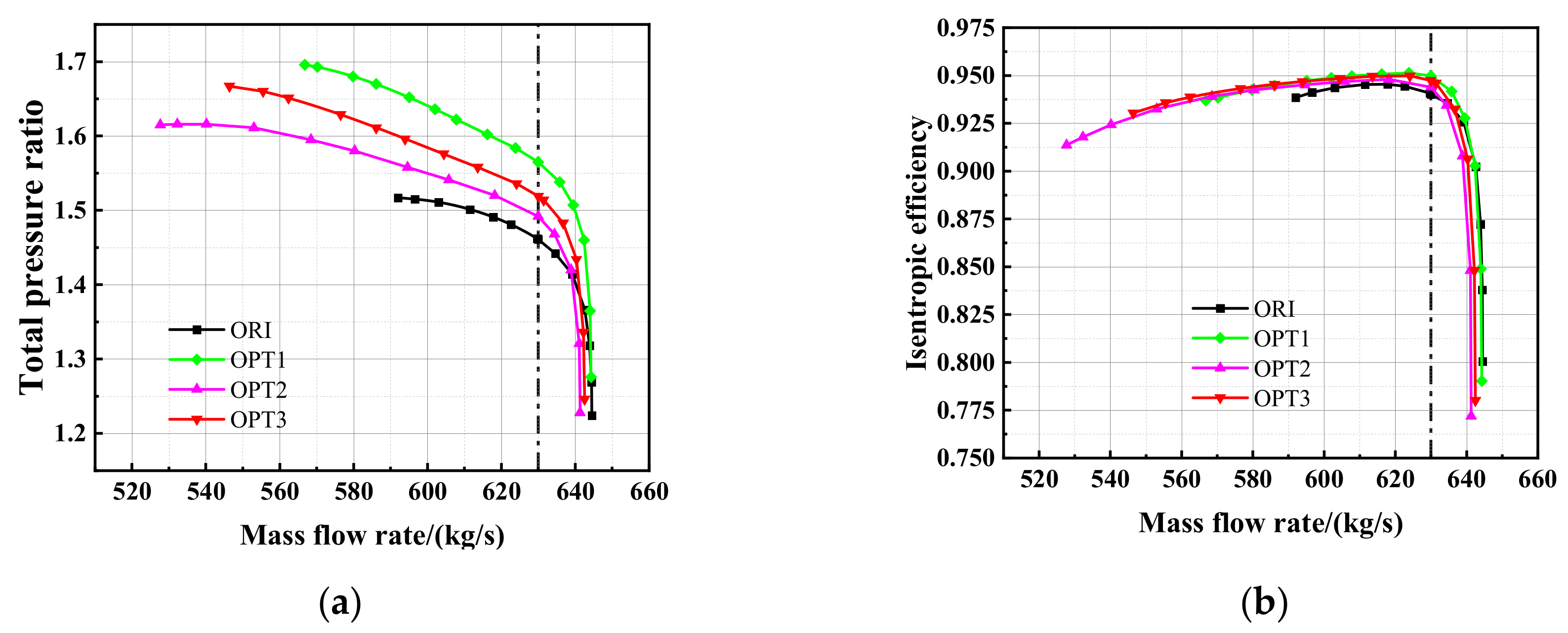
- The blade optimization method based on superimposing thickness on the suction surface and the Kriging surrogate optimization method can be successfully applied to the optimization of a transonic compressor rotor. Reasonable spanwise distributions of solidity and aspect ratio can significantly improve rotor performance. For OPT1, with a maximum isentropic efficiency improvement of 0.96%, the stall margin is increased by 10%, and the total pressure ratio at the design mass flow rate is increased from 1.461 to 1.565. For OPT2, with a maximum stall margin improvement of 18.7%, the isentropic efficiency is increased by 0.37%, and the total pressure ratio at the design mass flow point is increased from 1.461 to 1.492.
- (2)
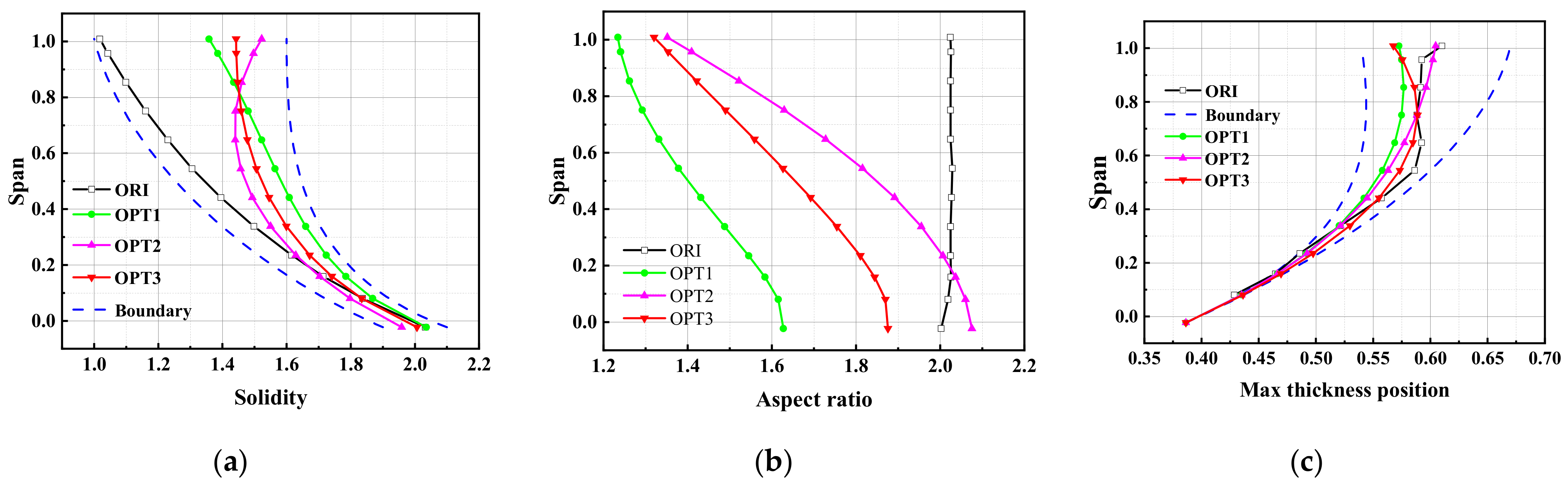
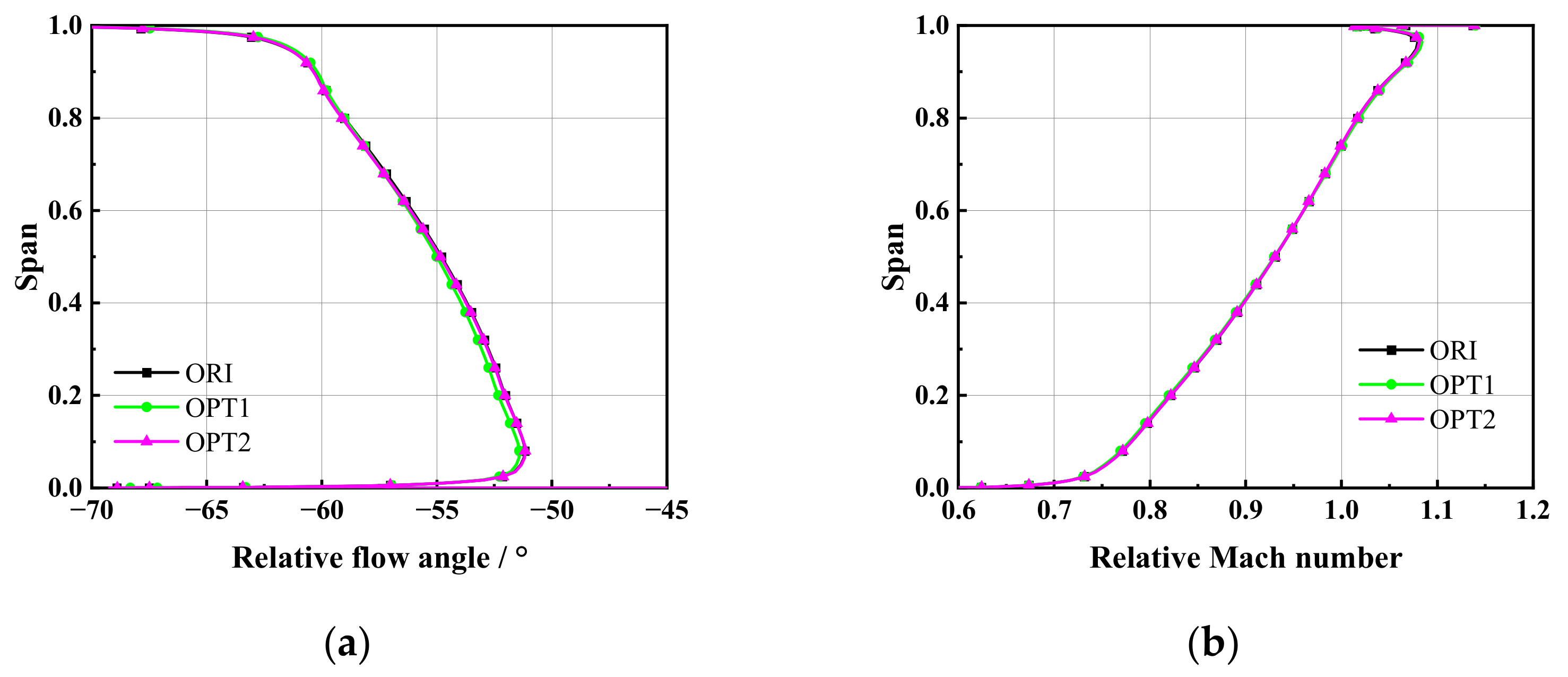
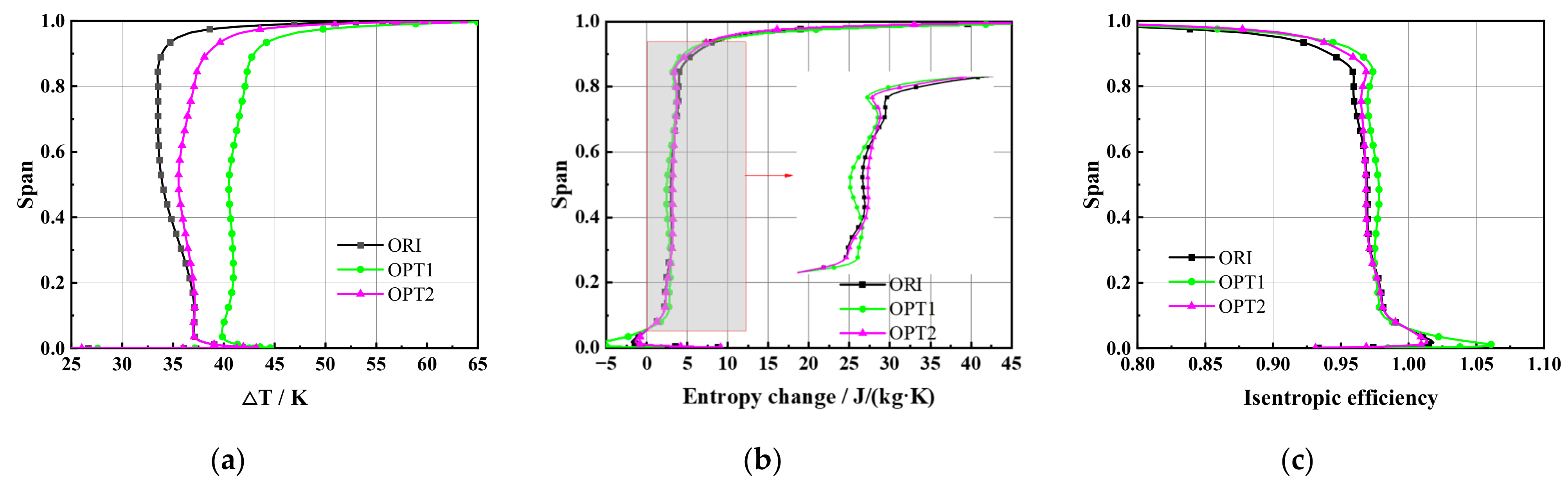
- An increase in solidity can significantly reduce the shock wave intensity and suppress the boundary layer separation induced by a shock wave. The radial migration of low-energy fluid under the actions of centrifugal force and radial pressure equilibrium after a shock wave can be significantly weakened, while the boundary layer separation loss during flow diffusion under the adverse pressure gradient may be increased. The low aspect ratio design can effectively decrease the boundary layer separation loss during flow diffusion. Therefore, reducing the number of blades and increasing the solidity at the same time can reduce the shock wave loss and the boundary layer separation loss, and the isentropic efficiency of the compressor rotor may be improved. However, the design of a large solidity and a small aspect ratio cannot improve the flow field near the hub region, and the absolute loss is positively correlated with chord length.
- (3)
- The main reason for the stall margin of an inlet stage transonic rotor is the radial matching of the limiting load of each blade section. The spanwise distributions of solidity and aspect ratio can significantly affect the load level of each blade section. With the load requirements set by the radial pressure equilibrium, the proper matching of spanwise distributions of solidity and aspect ratio can contribute to stall margin improvement.
- (4)
- There is a significant negative correlation between aspect ratio and total pressure ratio. To improve the total pressure ratio at the design mass flow point, the chord length represented by the aspect ratio is an important variable. There is a significant positive correlation between the ratio of the blade tip solidity to the hub solidity and the stall margin. To ensure that the transonic rotor has a sufficient stall margin, the ratio of the blade tip solidity to the hub solidity should not be less than 0.65.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hah, C.; Wennerstrom, A.J. Three-Dimensional Flowfields Inside a Transonic Compressor with Swept Blades. J. Turbomach. 1991, 113, 241–250. [Google Scholar] [CrossRef]
- Lieblein, S.; Schwenk, F.C.; Broderick, R.L. Diffusion Factor for Estimating Losses and Limiting Blade Loadings in Axial-Flow-Compressor Blade Elements; NACA Research Memorandum, Lewis Flight Propulsion Laboratory: Cleveland, OH, USA, 1953.
- Chen, M.Z. Development of Fan/Compressor Techniques and Suggestions on Further Researches. J. Aerosp. Power 2002, 17, 1–15. [Google Scholar] [CrossRef]
- Obrecht, T. HP Compressor Preliminary Design; von Karman Institute for Fluid Dynamics: Waterloosesteenweg, Belgium, 2013. [Google Scholar]
- Smith, L.H. Axial Compressor Aerodesign Evolution at General Electric. J. Turbomach. 2002, 124, 321–330. [Google Scholar] [CrossRef]
- Law, C.H.; Wadia, A.R. Low Aspect Ratio Transonic Rotors: Part 1—Baseline Design and Performance. J. Turbomach. 1993, 115, 218–225. [Google Scholar] [CrossRef]
- Broichhausen, K.D.; Ziegler, K.U. Supersonic and Transonic Compressors: Past, Status and Technology Trends. In Proceedings of the Volume 6: Turbo Expo 2005, Parts A and B, ASMEDC, Reno, NV, USA, 1 January 2005; pp. 63–74. [Google Scholar]
- Wennerstrom, A.J. Low Aspect Ratio Axial Flow Compressors: Why and What It Means. J. Turbomach. 1989, 111, 357–365. [Google Scholar] [CrossRef]
- Ward, S.A.; Johnson-Hirt, M. SGT-400 Industrial Gas Turbine Power Enhancement to 15 MW Design and Product Validation. In Proceedings of the ASME 2010 Power Conference, ASMEDC, Chicago, IL, USA, 1 January 2010; pp. 267–276. [Google Scholar]
- Wadia, A.R.; Copenhaver, W.W. An Investigation of the Effect of Cascade Area Ratios on Transonic Compressor Performance. J. Turbomach. 1996, 118, 760–770. [Google Scholar] [CrossRef]
- Yamagami, M.; Kodama, H.; Kato, D.; Tsuchiya, N.; Horiguchi, Y.; Kazawa, J. Unsteady Flow Effects in a High-Speed Multistage Axial Compressor. In Proceedings of the Volume 7: Turbomachinery, Parts A and B, ASMEDC, Orlando, FL, USA, 1 January 2009; pp. 1651–1664. [Google Scholar]
- Cumpsty, N.A. Some Lessons Learned. J. Turbomach. 2010, 132, 041018. [Google Scholar] [CrossRef]
- Shabbir, A.; Celestina, M.L.; Adamczyk, J.J.; Strazisar, A.J. The Effect of Hub Leakage Flow on Two High Speed Axial Flow Compressor Rotors. In Proceedings of the ASME 1997 International Gas Turbine and Aeroengine Congress and Exhibition, Orlando, FL, USA, 2–5 June 1997; p. V001T03A053. [Google Scholar]
- Chen, N.X.; Zhang, H.W.; Xu, Y.J.; Huang, W.G. Blade Parameterization and Aerodynamic Design Optimization for a 3D Transonic Compressor Rotor. J. Therm. Sci. 2007, 16, 105–114. [Google Scholar] [CrossRef]
- Okui, H.; Verstraete, T.; Van den Braembussche, R.A.; Alsalihi, Z. Three-Dimensional Design and Optimization of a Transonic Rotor in Axial Flow Compressors. J. Turbomach. 2013, 135, 031009. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, M.; Zhang, J.; Zhang, Y.; Lu, X. Integrated Optimization of a High-Lift Low-Pressure Turbine Cascade Based on Dynamic Support Vector Regression. Aerosp. Sci. Technol. 2022, 131, 107986. [Google Scholar] [CrossRef]
- Zhou, Z.; Huang, J.T.; Huang, Y.; Liu, G.; Chen, Z.B.; Wang, Y.T.; Jiang, X. CFD technology in aeronautic engineering field: Ap-plications, challenges and development. Acta Aeronaut. Astronaut. Sin. 2017, 38, 6–30. [Google Scholar] [CrossRef]
- Semlitsch, B.; Huscava, A. Shape Optimisation of Turbomachinery Components. In Proceedings of the 8th European Congress on Computational Methods in Applied Sciences and Engineering, Oslo, Norway, 5–9 June 2022; pp. 1–8. [Google Scholar]
- Gao, Z.H.; Wang, C. Aerodynamic shape design methods for aircraft: Status and trends. Acta Aerodyn. Sin. 2017, 35, 516–528. [Google Scholar] [CrossRef]
- Han, Z.H. Kriging surrogate model and its application to design optimization. Acta Aeronaut. Astronaut. Sin. 2016, 37, 3197–3225. [Google Scholar] [CrossRef]
- Han, Z.H.; Xu, C.Z.; Qiao, J.L.; Liu, F.; Chi, J.B.; Meng, G.Y.; Zhang, K.S.; Song, W.P. Recent progress of efficient global aerodynamic shape optimization using surrogate-based approach. Acta Aeronaut. Astronaut. Sin. 2020, 41, 30–70. [Google Scholar] [CrossRef]
- Han, Z.H.; Zhang, K.S. Surrogate-Based Optimization. In Real-World Applications of Genetic Algorithms; Roeva, O., Ed.; IntechOpen: London, UK, 2012; pp. 343–362. [Google Scholar]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Wadia, A.R.; Beacher, B.F. Three-Dimensional Relief in Turbomachinery Blading. J. Turbomach. 1990, 112, 587–596. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Mass flow rate | 630 kg/s |
| Flow coefficient | 0.57 |
| Corrected speed | 3000 rpm |
| Tip relative Mach number (Rotor) | 1.08 |
| Number of blades (IGV/Rotor) | 51/27 |
| Mid Solidity | 1.35 |
| Aspect Ratio | 1.98 |
| Total pressure ratio | 1.46 |
| Isentropic efficiency | 94.02% |
| Comprehensive stall margin | 10.5% |
| Variable | Original Value | Upper Limit | Lower Limit |
|---|---|---|---|
| Var1 | 2.03 | 1.9 | 2.1 |
| Var2 | 1.58 | 1.5 | 1.64 |
| Var3 | 1.23 | 1.1 | 1.6 |
| Var4 | 1.02 | 1.0 | 1.6 |
| Var5 | 0.60 | 0.55 | 0.65 |
| Var6 | 0.61 | 0.54 | 0.67 |
| Number of blades | 27 | 21 | 27 |
| Number of Blades | Mean Aspect Ratio | Design Mass Flow Rate | Isentropic Efficiency | Stall Margin | Total Pressure Ratio | |
|---|---|---|---|---|---|---|
| ORI | 27 | 1.98 | 630 kg/s | 94.02% | 10.5% | 1.461 |
| OPT1 | 22 | 1.42 | 630 kg/s | 94.98% | 20.5% | 1.565 |
| OPT2 | 27 | 1.78 | 630 kg/s | 94.39% | 29.2% | 1.492 |
| OPT3 | 25 | 1.63 | 630 kg/s | 94.74% | 26.5% | 1.519 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Geng, S.; Li, X.; Jin, Y.; Zhang, H. Optimization Design of Aspect Ratio and Solidity of a Heavy-Duty Gas Turbine Transonic Compressor Rotor. Machines 2023, 11, 82. https://doi.org/10.3390/machines11010082
Liu S, Geng S, Li X, Jin Y, Zhang H. Optimization Design of Aspect Ratio and Solidity of a Heavy-Duty Gas Turbine Transonic Compressor Rotor. Machines. 2023; 11(1):82. https://doi.org/10.3390/machines11010082
Chicago/Turabian StyleLiu, Shuaipeng, Shaojuan Geng, Xinlong Li, Yun Jin, and Hongwu Zhang. 2023. "Optimization Design of Aspect Ratio and Solidity of a Heavy-Duty Gas Turbine Transonic Compressor Rotor" Machines 11, no. 1: 82. https://doi.org/10.3390/machines11010082
APA StyleLiu, S., Geng, S., Li, X., Jin, Y., & Zhang, H. (2023). Optimization Design of Aspect Ratio and Solidity of a Heavy-Duty Gas Turbine Transonic Compressor Rotor. Machines, 11(1), 82. https://doi.org/10.3390/machines11010082