
Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review



Abstract
:1. Introduction
2. Design of Soft Continuum Robots with PAMs
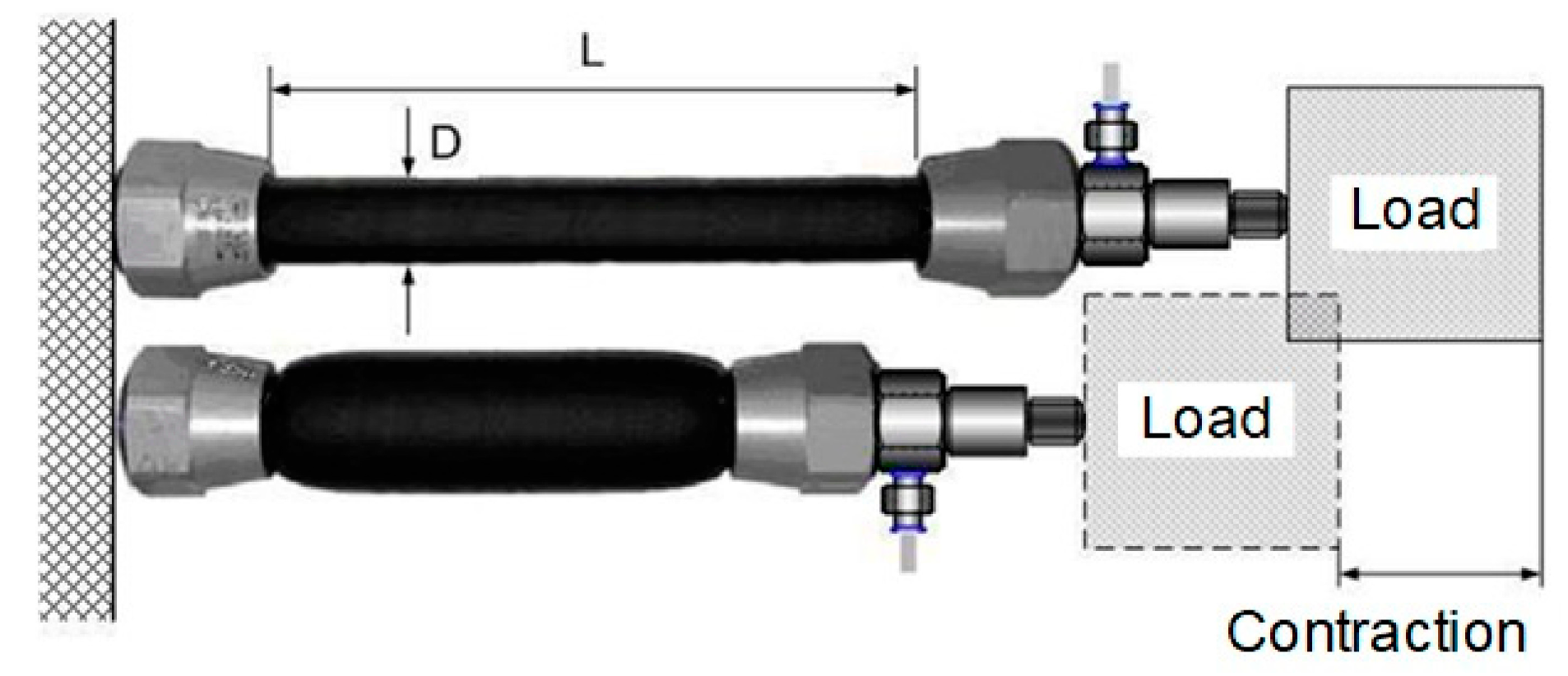
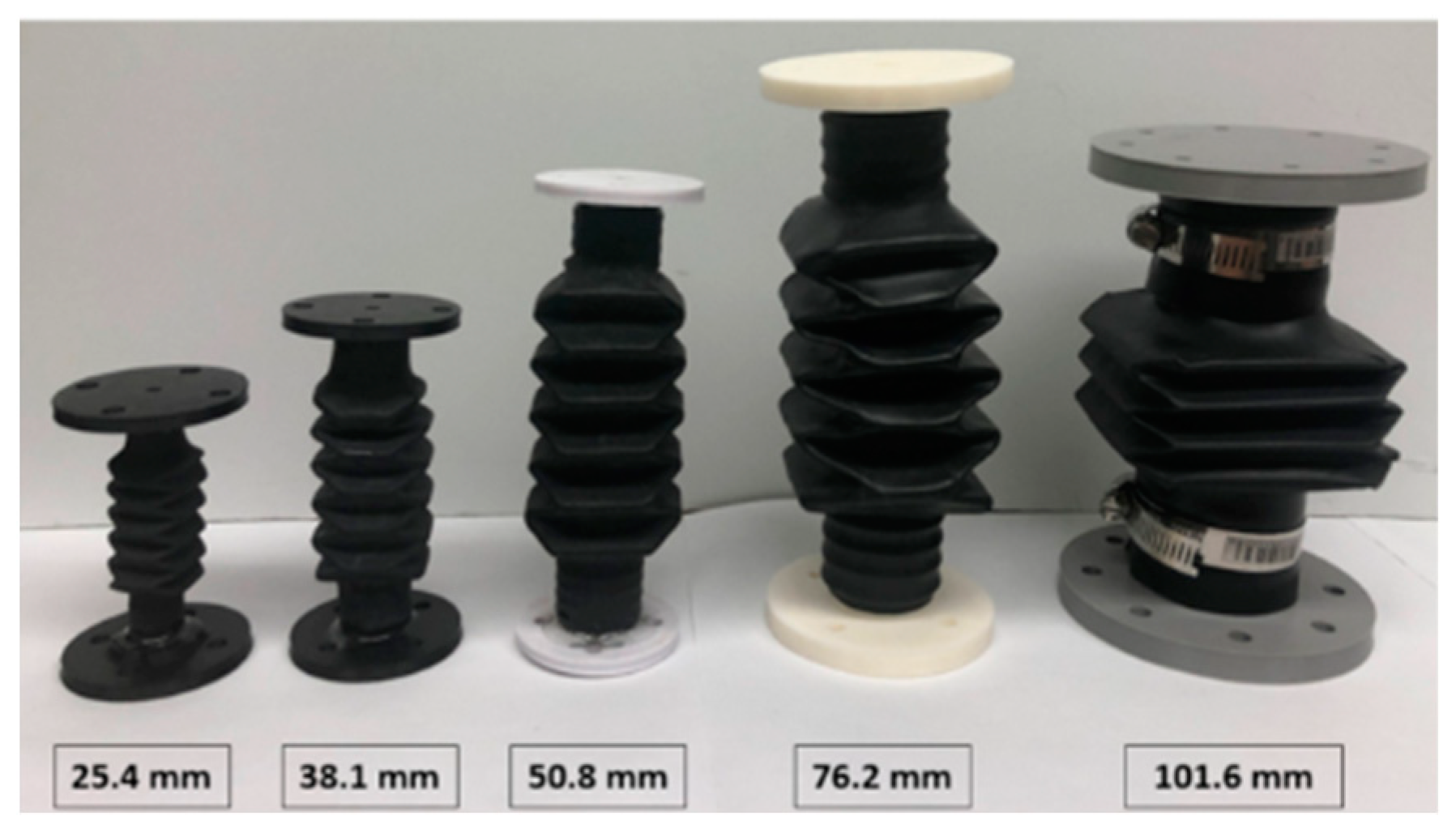
2.1. McKibben Soft Manipulator
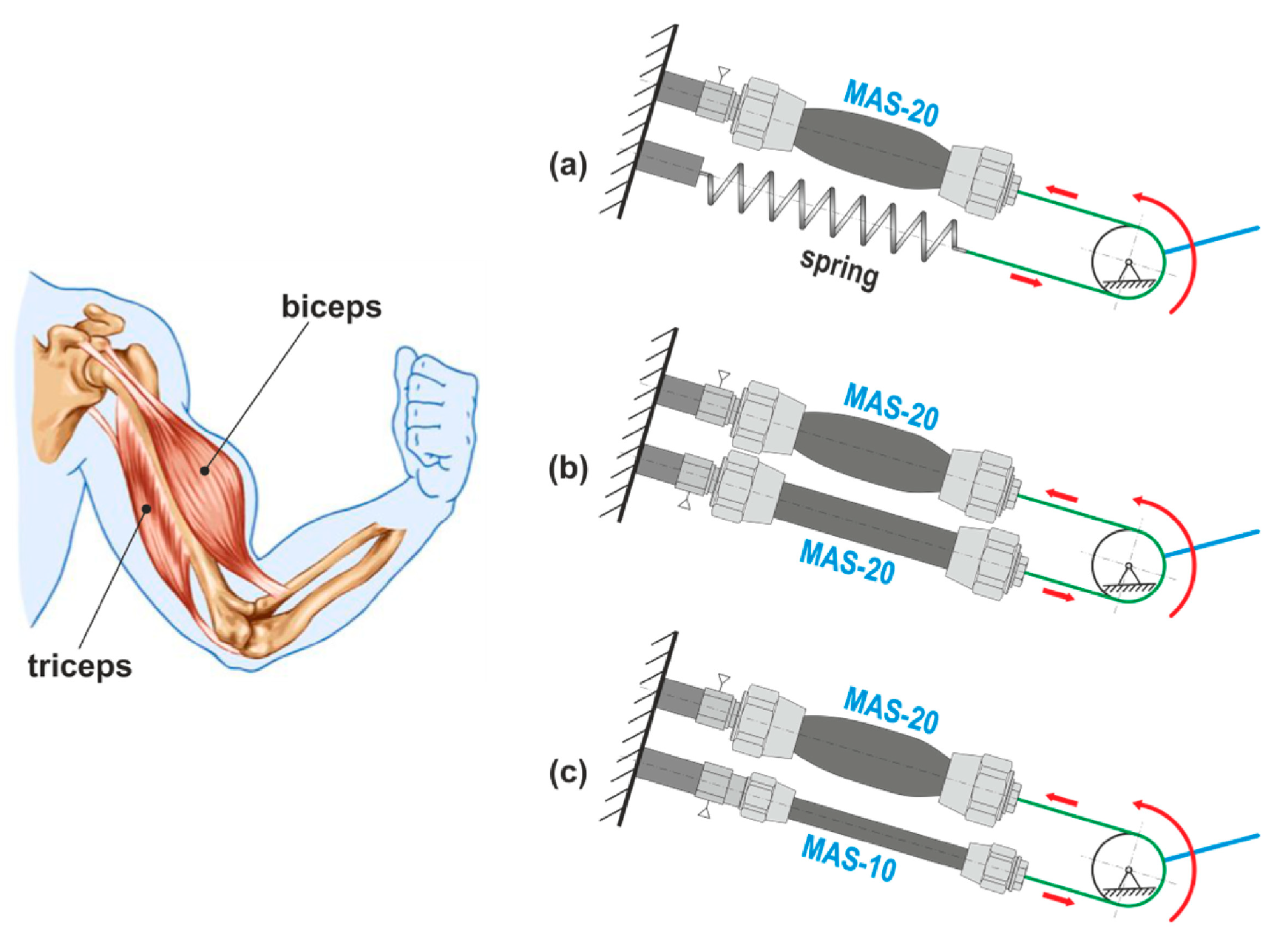
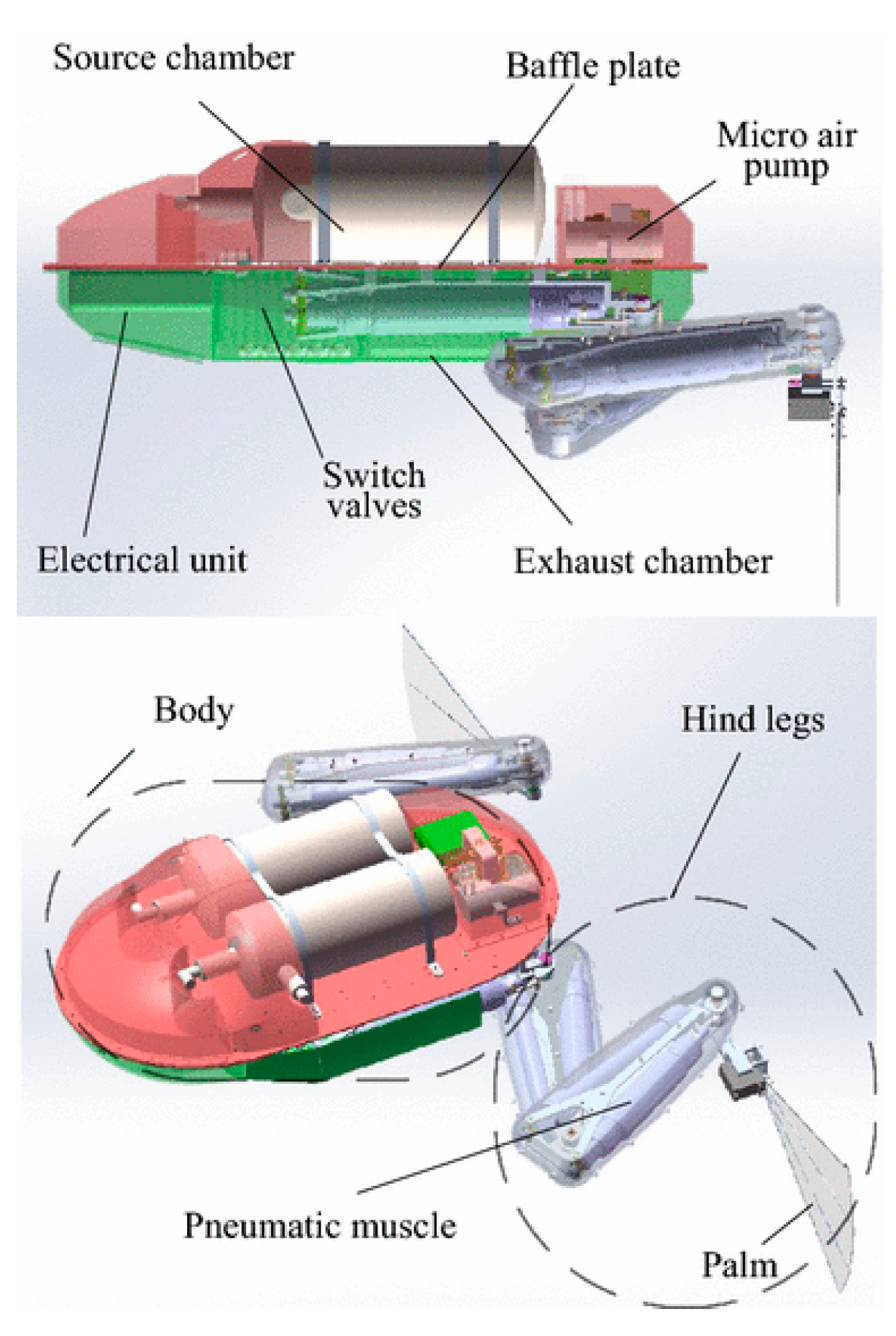
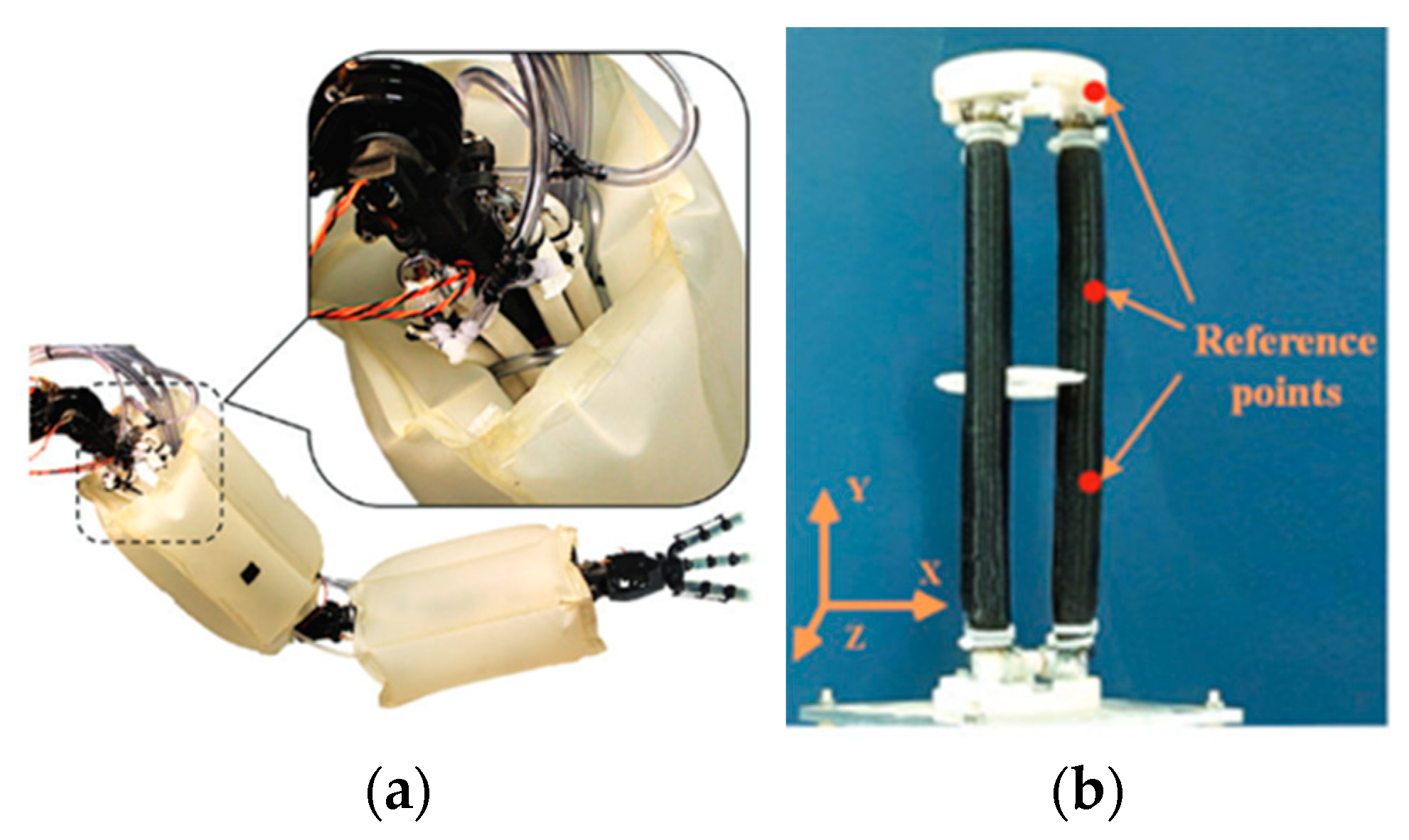
2.2. Bioinspired Arms
2.3. Hybrid Robotics
3. Mathematical Modelling of Soft Continuum Robots with PAMs
3.1. Kinematics Modelling
3.2. Dynamics Modelling
+ (ρ × I × ω/e2) × ∂e/∂t + e × c

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Theoretical Basis | Relative Error | Object of Study |
|---|---|---|---|
| Meng et al. [66] | Lagrange formula | settle out to 0 | length and velocity |
| Mustaza et al. [67] | Lagrange formula | <5% | Position, length, angle |
| Godage et al. [68] | Lagrange formula | ~0.02% | Length |
| Mishra et al. [72] | Cosserat-rod theory | settle out to 0 | Angles |
| Trivedi et al. [73] | Cosserat rod theory | ~5% | Length, angles |
| Godage et al. [74] | Lagrange formula | 11% | Length |
| Sofla et al. [75] | Lagrange formula | 7% | Angles, position |
| Wang et al. [76] | Deflection theorem | <8.5% | Angles, length |
| Pourghasemi et al. [80] | Cosserat rod theory | 1.27% | Position, angles |
| Li et al. [81] | Cosserat rod theory | 5.4% | Position |
| Alessi et al. [82] | Cosserat rod theory | 4.83% | Length |
4. Control of Soft Continuum Robots with PAMs
4.1. Model-Based Control
4.2. Model-Free Control
5. Simulation of Soft Continuum Robots with PAMs
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tang, X.; Li, H.; Ma, T.; Yang, Y.; Luo, J.; Wang, H.; Jiang, P. A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators 2022, 11, 331. [Google Scholar] [CrossRef]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar] [CrossRef]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft Robotics: Biological Inspiration, State of the Art, and Future Research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H. Soft Robotics: Morphology and Morphology-inspired Motion Strategy. IEEE/CAA J. Autom. Sin. 2021, 8, 1500–1522. [Google Scholar] [CrossRef]
- Alici, G. Softer is Harder: What Differentiates Soft Robotics from Hard Robotics? MRS Adv. 2018, 3, 1557–1568. [Google Scholar] [CrossRef]
- Walker, I.D. Continuous Backbone “Continuum” Robot Manipulators. Int. Sch. Res. Not. 2013, 2013, e726506. [Google Scholar] [CrossRef]
- Renda, F.; Boyer, F.; Dias, J.; Seneviratne, L. Discrete Cosserat Approach for Multisection Soft Manipulator Dynamics. IEEE Trans. Robot. 2018, 34, 1518–1533. [Google Scholar] [CrossRef]
- Martin, Y.J.; Bruder, D.; Wood, R.J. A Proprioceptive Method for Soft Robots Using Inertial Measurement Units. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 9379–9384. [Google Scholar]
- Spielberg, A.; Amini, A.; Chin, L.; Matusik, W.; Rus, D. Co-Learning of Task and Sensor Placement for Soft Robotics. IEEE Robot. Autom. Lett. 2021, 6, 1208–1215. [Google Scholar] [CrossRef]
- Wang, J.; Chortos, A. Control Strategies for Soft Robot Systems. Adv. Intell. Syst. 2022, 4, 2100165. [Google Scholar] [CrossRef]
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Zaghloul, A.; Bone, G.M. Origami-Inspired Soft Pneumatic Actuators: Generalization and Design Optimization. Actuators 2023, 12, 72. [Google Scholar] [CrossRef]
- Grissom, M.D.; Chitrakaran, V.; Dienno, D.; Csencits, M.; Pritts, M.; Jones, B.; McMahan, W.; Dawson, D.; Rahn, C.; Walker, I. Design and experimental testing of the OctArm soft robot manipulator. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 9 May 2006; p. 10. [Google Scholar]
- Tauber, F.; Desmulliez, M.P.Y.; Piccin, O.; Stokes, A.A. Perspective for soft robotics: The field’s past and future. Bioinspiration Biomim. 2023, 18, 035001. [Google Scholar] [CrossRef] [PubMed]
- Seleem, I.A.; El-Hussieny, H.; Ishii, H. Recent Developments of Actuation Mechanisms for Continuum Robots: A Review. Int. J. Control. Autom. Syst. 2023, 21, 1592–1609. [Google Scholar] [CrossRef] [PubMed]
- Zang, X.; Liu, Y.; Heng, S.; Lin, Z.; Zhao, J. Position control of a single pneumatic artificial muscle with hysteresis compensation based on modified Prandtl–Ishlinskii model. Bio-Med. Mater. Eng. 2017, 28, 131–140. [Google Scholar] [CrossRef]
- Šitum, Ž.; Herceg, S.; Bolf, N.; Andrijić, Ž.U. Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles. Sensors 2023, 23, 776. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92. [Google Scholar] [CrossRef]
- Yang, H.D. Modeling and Analysis of a Novel Pneumatic Artificial Muscle and Pneumatic Arm Exoskeleton. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2017. [Google Scholar]
- Pritts, M.B.; Rahn, C.D. Design of an artificial muscle continuum robot. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004 Proceedings, ICRA ’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. The design and mathematical modelling of novel extensor bending pneumatic artificial muscles (EBPAMs) for soft exoskeletons. Robot. Auton. Syst. 2018, 99, 63–74. [Google Scholar] [CrossRef]
- Faudzi, A.A.M.; Razif, M.R.M.; Endo, G.; Nabae, H.; Suzumori, K. Soft-amphibious robot using thin and soft McKibben actuator. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 981–986. [Google Scholar]
- Faudzi, A.A.; Azmi, N.I.; Sayahkarajy, M.; Xuan, W.L.; Suzumori, K. Soft manipulator using thin McKibben actuator. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 334–339. [Google Scholar]
- Nakamura, T. Experimental comparisons between McKibben type artificial muscles. In Smart Structures, Devices, and Systems III; SPIE: Bellingham, WA, USA, 2006; p. 641426. [Google Scholar]
- Saggin, B.; Scaccabarozzi, D.; Tarbini, M.; Magni, M.; Biffi, C.A.; Tuissi, A. Design of a smart bidirectional actuator for space operation. Smart Mater. Struct. 2017, 26, 035041. [Google Scholar] [CrossRef]
- Carello, M.; Ferraresi, C.; Visconte, C. A New Flexible Pneumatic Finger for a Fruit Harvesting Hand. In Proceedings of the 7th International Symposium on Fluid Control, Measurement and Visualization, Sorrento, Italy, 25–28 August 2003. [Google Scholar]
- Zhu, Y.; Chu, K.; Chen, X.; Wang, X.; Su, H. Research and application of a multi-degree-of-freedom soft actuator. Sens. Actuators A Phys. 2022, 338, 113492. [Google Scholar] [CrossRef]
- Greer, J.D.; Morimoto, T.K.; Okamura, A.M.; Hawkes, E.W. Series pneumatic artificial muscles (sPAMs) and application to a soft continuum robot. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5503–5510. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. A Robot Continuum Arm Inspired by the Human Upper Limb: The Pronation and Supination Rotating Behaviour. In Proceedings of the 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Istanbul, Turkey, 12–13 June 2020. [Google Scholar]
- Petre, I.M. An approach regarding some performances of a FESTO pneumatic muscle actuator. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1009, 012047. [Google Scholar] [CrossRef]
- Yukisawa, T.; Nishikawa, S.; Niiyama, R.; Kawahara, Y.; Kuniyoshi, Y. Ceiling continuum arm with extensible pneu-matic actuators for desktop workspace. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 196–201. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Cooperative project by self-bending continuum arms. In Proceedings of the 2017 23rd International Conference on Automation and Computing (ICAC), Huddersfield, UK, 7–8 September 2017; pp. 1–6. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S.; Theodoridis, T. Design of Two Segments Continuum Robot Arm Based on Pneumatic Muscle Actuator (PMA). In Proceedings of the 2018 24th International Conference on Automation and Computing (ICAC), Newcastle Upon Tyne, UK, 6–7 September 2018; pp. 1–6. [Google Scholar]
- Tuleja, P.; Jánoš, R.; Semjon, J.; Sukop, M.; Marcinko, P. Analysis of the Antagonistic Arrangement of Pneumatic Muscles Inspired by a Biological Model of the Human Arm. Actuators 2023, 12, 204. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Novel models for the extension pneumatic muscle actuator performances. In Proceedings of the 2017 23rd International Conference on Automation and Computing (ICAC), Huddersfield, UK, 7–8 September 2017; pp. 1–6. [Google Scholar]
- Park, Y.L.; Wood, R.J. Smart pneumatic artificial muscle actuator with embedded microfluidic sensing. In Proceedings of the SENSORS 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Hassan, T.; Cianchetti, M.; Mazzolai, B.; Laschi, C.; Dario, P. Active-Braid, a Bioinspired Continuum Manipulator. IEEE Robot. Autom. Lett. 2017, 2, 2104–2110. [Google Scholar] [CrossRef]
- Kang, R.; Branson, D.T.; Zheng, T.; Guglielmino, E.; Caldwell, D.G. Design, modeling and control of a pneumatically actuated manipulator inspired by biological continuum structures. Bioinspiration Biomim. 2013, 8, 036008. [Google Scholar] [CrossRef] [PubMed]
- Kang, R.; Guglielmino, E.; Zullo, L.; Branson, D.T.; Godage, I.; Caldwell, D.G. Embodiment design of soft continuum robots. Adv. Mech. Eng. 2016, 8, 1687814016643302. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Design, Kinematics and Controlling a Novel Soft Robot Arm with Parallel Motion. Robotics 2018, 7, 19. [Google Scholar] [CrossRef]
- Lopez, M.; Haghshenas-Jaryani, M. A Study of Energy-Efficient and Optimal Locomotion in a Pneumatic Artificial Muscle-Driven Snake Robot. Robotics 2023, 12, 89. [Google Scholar] [CrossRef]
- Fan, J.-Z.; Zhang, W.; Kong, P.-C.; Cai, H.-G.; Liu, G.-F. Design and Dynamic Model of a Frog-inspired Swimming Robot Powered by Pneumatic Muscles. Chin. J. Mech. Eng. 2017, 30, 1123–1132. [Google Scholar] [CrossRef]
- Harsono, E.; Yang, J.; Bhattacharya, S.; Yu, H. Design and analysis of a novel hybrid-driven continuum robot with variable stiffness. Mech. Mach. Theory 2022, 177, 105067. [Google Scholar] [CrossRef]
- Yang, H.D.; Asbeck, A.T. Design and Characterization of a Modular Hybrid Continuum Robotic Manipulator. IEEE/ASME Trans. Mechatron. 2020, 25, 2812–2823. [Google Scholar] [CrossRef]
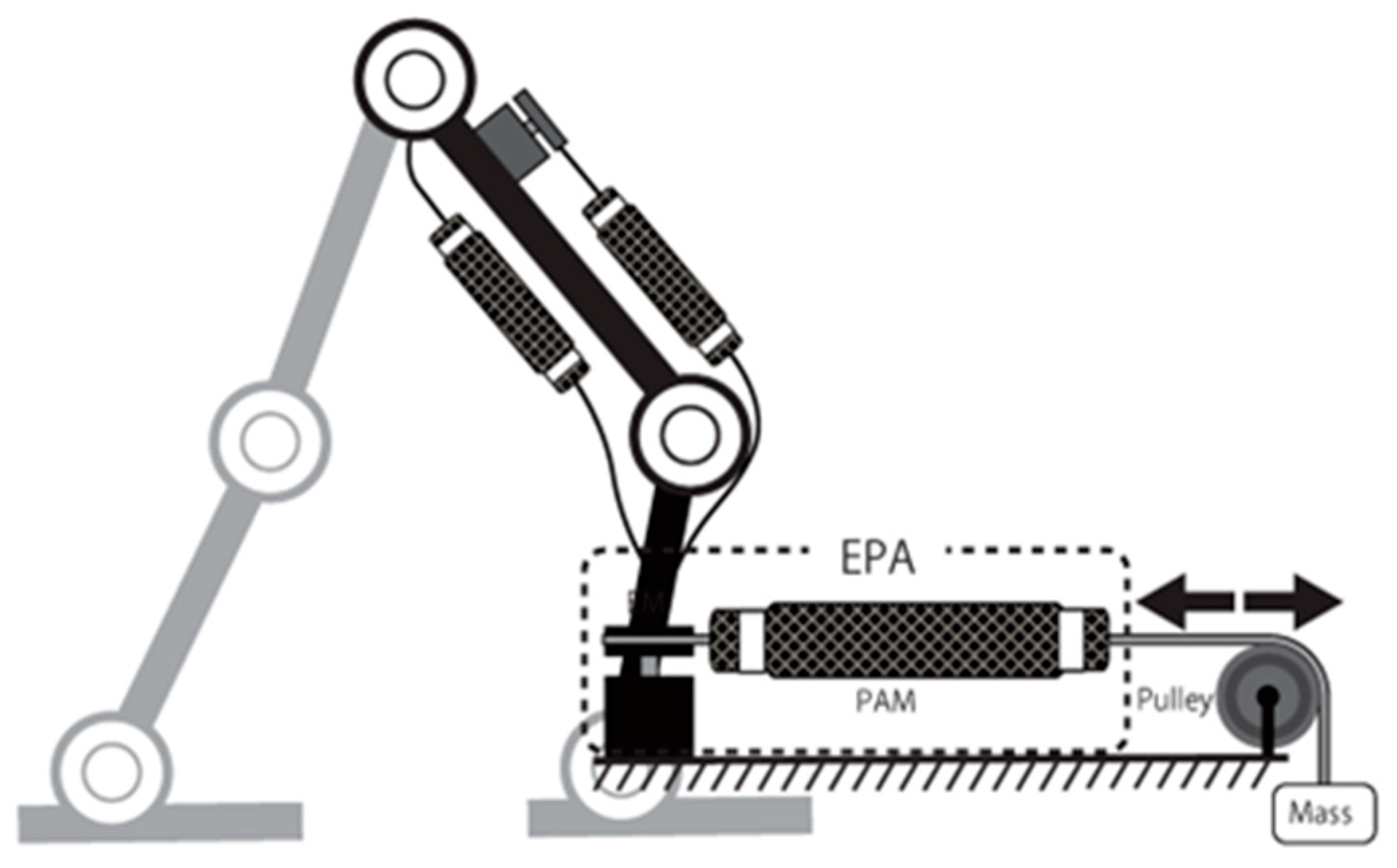
- Ahmad Sharbafi, M.; Shin, H.; Zhao, G.; Hosoda, K.; Seyfarth, A. Electric-Pneumatic Actuator: A New Muscle for Locomotion. Actuators 2017, 6, 30. [Google Scholar] [CrossRef]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.-L. Design of a Lightweight Soft Robotic Arm Using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Chen, L.; Liu, J.; Dai, J.S.; Kang, R. A hybrid continuum robot based on pneumatic muscles with embedded elastic rods. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 234, 318–328. [Google Scholar] [CrossRef]
- Nazari, A.A.; Castro, D.; Godage, I.S. Forward and Inverse Kinematics of a Single Section Inextensible Continuum Arm. arXiv 2019, arXiv:1907.06518. [Google Scholar]
- Lei, J.; Zhu, J.; Xie, P.; Tokhi, M. Joint variable stiffness of musculoskeletal leg mechanism for quadruped robot. Adv. Mech. Eng. 2017, 9, 1687814017690342. [Google Scholar] [CrossRef]
- Wang, X.; Geng, T.; Elsayed, Y.; Saaj, C.; Lekakou, C. A unified system identification approach for a class of pneumat-ically-driven soft actuators. Robot. Auton. Syst. 2015, 63, 136–149. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Design, implementation and modelling of the single and multiple extensor pneumatic muscle actuators. Syst. Sci. Control. Eng. 2018, 6, 80–89. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, X.; Wang, J.; Wu, Z.; Chen, X.; Zhao, Y. Design, Modelling and Implementation of a Foldable Pneumatic Soft Manipulator. Microgravity Sci. Technol. 2022, 34, 44. [Google Scholar] [CrossRef]
- Kim, R.-H.; Kang, C.-H.; Bae, J.-H.; Kang, B.-S. Development of a continuum robot using pneumatic artificial muscles. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Korea, 22–25 October 2014; pp. 1401–1403. [Google Scholar]
- Chen, Y.; Zhang, J.; Gong, Y. Novel Design and Modeling of a Soft Pneumatic Actuator Based on Antagonism Mechanism. Actuators 2020, 9, 107. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiang, C.; Yang, H.; Li, Y.; Hao, L. Static analysis of novel continuum robot driven by PAMs. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 96–100. [Google Scholar]
- Peng, Y.; Liu, Y.; Yang, Y.; Liu, N.; Sun, Y.; Liu, Y.; Pu, H.; Xie, S.; Luo, J. Development of continuum manipulator actuated by thin McKibben pneumatic artificial muscle. Mechatronics 2019, 60, 56–65. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, X.; Li, J.; Huo, X.; Sun, H.; Zhang, G.; Xing, Q.; Liu, M.; Ma, T.; Ding, Q. Impedance Iterative Learning Backstepping Control for Output-Constrained Multisection Continuum Arms Based on PMA. Micromachines 2022, 13, 1532. [Google Scholar] [CrossRef]
- Zi, B.; Yin, G.; Zhang, D. Design and Optimization of a Hybrid-Driven Waist Rehabilitation Robot. Sensors 2016, 16, 2121. [Google Scholar] [CrossRef] [PubMed]
- Kang, B.-S.; Park, E.J. Modeling and control of an intrinsic continuum robot actuated by pneumatic artificial muscles. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 1157–1162. [Google Scholar]
- Müller, D.; Sawodny, O. Modeling the Soft Bellows of the Bionic Soft Arm. IFAC-PapersOnLine 2022, 55, 229–234. [Google Scholar] [CrossRef]
- Godage, I.S.; Guglielmino, E.; Branson, D.T.; Medrano-Cerda, G.A.; Caldwell, D.G. Novel modal approach for kinematics of multisection continuum arms. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1093–1098. [Google Scholar]
- Jang, J.H.; Jamil, B.; Moon, Y.; Coutinho, A.; Park, G.; Rodrigue, H. Design of Gusseted Pouch Motors for Improved Soft Pneumatic Actuation. IEEE/ASME Trans. Mechatron. 2023, 1–11. [Google Scholar] [CrossRef]
- Stella, F.; Guan, Q.; Della Santina, C.; Hughes, J. Piecewise Affine Curvature model: A Reduced-Order Model for Soft Robot-Environment Interaction Beyond PCC. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023. [Google Scholar]
- Deng, J.; Meng, B.H.; Kanj, I.; Godage, I.S. Near-optimal Smooth Path Planning for Multisection Continuum Arms. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 416–421. [Google Scholar]
- Fernando, Y.; Parnichkun, M. Development and Control of a Flexible Actuation-Based Delta Robot. In Proceedings of the IECON 2022—48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–6. [Google Scholar]
- Meng, F.; Lv, Y.; Ma, G.; Zhu, Y. A Model-Based Sliding-Mode Tracking Controller for Pneumatic Muscle Actuated Continuum Arms. In Proceedings of the 2018 Eighth International Conference on Instrumentation & Measurement, Computer, Communication and Control (IMCCC), Harbin, China, 19–21 July 2018; pp. 636–640. [Google Scholar] [CrossRef]
- Mustaza, S.M.; Elsayed, Y.; Lekakou, C.; Saaj, C.; Fras, J. Dynamic Modeling of Fiber-Reinforced Soft Manipulator: A Visco-Hyperelastic Material-Based Continuum Mechanics Approach. Soft Robot. 2019, 6, 305–317. [Google Scholar] [CrossRef]
- Godage, I.S.; Medrano-Cerda, G.A.; Branson, D.T.; Guglielmino, E.; Caldwell, D.G. Dynamics for variable length multisection continuum arms. Int. J. Robot. Res. 2016, 35, 695–722. [Google Scholar] [CrossRef]
- Minh, T.V.; Tjahjowidodo, T.; Ramon, H.; Van Brussel, H. Control of a pneumatic artificial muscle (PAM) with model-based hysteresis compensation. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1082–1087. [Google Scholar]
- Van Damme, M.; Beyl, P.; Vanderborght, B.; Van Ham, R.; Vanderniepen, I.; Versluys, R.; Daerden, F.; Lefeber, D. Modeling Hysteresis in Pleated Pneumatic Artificial Muscles. In Proceedings of the 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; pp. 471–476. [Google Scholar] [CrossRef]
- Xie, S.; Liu, H.; Wang, Y. A method for the length-pressure hysteresis modeling of pneumatic artificial muscles. Sci. China Technol. Sci. 2020, 63, 829–837. [Google Scholar] [CrossRef]
- Mishra, M.K.; Samantaray, A.K.; Chakraborty, G. Fractional-order Bouc-wen hysteresis model for pneumatically actuated continuum manipulator. Mech. Mach. Theory 2022, 173, 104841. [Google Scholar] [CrossRef]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically exact dynamic models for soft robotic manipulators. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1497–1502. [Google Scholar]
- Godage, I.S.; Branson, D.T.; Guglielmino, E.; Caldwell, D.G. Pneumatic muscle actuated continuum arms: Modelling and experimental assessment. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4980–4985. [Google Scholar] [CrossRef]
- Sofla, M.S.; Sadigh, M.J.; Zareinejad, M. Design and dynamic modeling of a continuum and compliant manipulator with large workspace. Mech. Mach. Theory 2021, 164, 104413. [Google Scholar] [CrossRef]
- Wang, M.; Wang, W.; Qiu, Z.; Zhao, J.; Wu, C.; Cai, S.; Bao, G. Modeling the Soft Continuum Robot Based on Large Deflection Theorem. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 209–214. [Google Scholar]
- de Payrebrune, K.M.; O’Reilly, O.M. On the development of rod-based models for pneumatically actuated soft robot arms: A five-parameter constitutive relation. Int. J. Solids Struct. 2017, 120, 226–235. [Google Scholar] [CrossRef]
- Abbasi, P.; Nekoui, M.A.; Zareinejad, M.; Abbasi, P.; Azhang, Z. Position and Force Control of a Soft Pneumatic Actuator. Soft Robot. 2020, 7, 550–563. [Google Scholar] [CrossRef]
- Gilbert, H.B.; Godage, I.S. Validation of an Extensible Rod Model for Soft continuum Manipulators. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 711–716. [Google Scholar]
- Hanza, S.P.; Ghafarirad, H. Mechanics of fiber-reinforced soft manipulators based on inhomogeneous Cosserat rod theory. Mech. Adv. Mater. Struct. 2023, 1–13. [Google Scholar] [CrossRef]
- Li, H.; Xun, L.; Zheng, G. Piecewise Linear Strain Cosserat Model for Soft Slender Manipulator. IEEE Trans. Robot. 2023, 39, 2342–2359. [Google Scholar] [CrossRef]
- Alessi, C.; Falotico, E.; Lucantonio, A. Ablation Study of a Dynamic Model for a 3D-Printed Pneumatic Soft Robotic Arm. IEEE Access 2023, 11, 37840–37853. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef]
- Bruder, D.; Fu, X.; Gillespie, R.B.; Remy, C.D.; Vasudevan, R. Koopman-Based Control of a Soft Continuum Manipulator Under Variable Loading Conditions. IEEE Robot. Autom. Lett. 2021, 6, 6852–6859. [Google Scholar] [CrossRef]
- Bruder, D.; Gillespie, B.; Remy, C.D.; Vasudevan, R. Modeling and Control of Soft Robots Using the Koopman Operator and Model Predictive Control. arXiv 2019, arXiv:1902.02827. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-Based Reinforcement Learning for Closed-Loop Dynamic Control of Soft Robotic Manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar] [CrossRef]
- Qin, Y.; Zhang, H.; Wang, X.; Han, J. Active Model-Based Hysteresis Compensation and Tracking Control of Pneumatic Artificial Muscle. Sensors 2022, 22, 364. [Google Scholar] [CrossRef]
- Liu, G.; Sun, N.; Yang, T.; Liu, Z.; Fang, Y. Equivalent-input-disturbance rejection-based adaptive motion control for pneumatic artificial muscle arms via hysteresis compensation models. Control. Eng. Pract. 2023, 138, 105609. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. 3D position mapping of continuum arm. In Proceedings of the 2016 International Conference for Students on Applied Engineering (ICSAE), Newcastle, UK, 20–21 October 2016; pp. 1–6. [Google Scholar]
- Furukawa, S.; Wakimoto, S.; Kanda, T.; Hagihara, H. A Soft Master-Slave Robot Mimicking Octopus Arm Structure Using Thin Artificial Muscles and Wire Encoders. Actuators 2019, 8, 40. [Google Scholar] [CrossRef]
- Azizkhani, M.; Godage, I.S.; Chen, Y. Dynamic Control of Soft Robotic Arm: A Simulation Study. IEEE Robot. Autom. Lett. 2022, 7, 3584–3591. [Google Scholar] [CrossRef]
- Khan, A.H.; Shao, Z.; Li, S.; Wang, Q.; Guan, N. Which is the best PID variant for pneumatic soft robots an experimental study. IEEE/CAA J. Autom. Sin. 2020, 7, 451–460. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Renda, F.; Iida, F. First-Order Dynamic Modeling and Control of Soft Robots. Front. Robot. AI 2020, 7, 95. [Google Scholar] [CrossRef]
- Torres, E.; Nakajima, K.; Godage, I.S. Information Processing Capability of Soft Continuum Arms. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 441–447. [Google Scholar]
- Li, M.; Kang, R.; Branson, D.T.; Dai, J.S. Model-Free Control for Continuum Robots Based on an Adaptive Kalman Filter. IEEE/ASME Trans. Mechatron. 2017, 23, 286–297. [Google Scholar] [CrossRef]
- Zou, S.; Lyu, Y.; Qi, J.; Ma, G.; Guo, Y. A deep neural network approach for accurate 3D shape estimation of soft manipulator with vision correction. Sens. Actuators A Phys. 2022, 344, 113692. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.; Kwok, K.-W. A Survey for Machine Learning-Based Control of Continuum Robots. Front. Robot. AI 2021, 8, 730330. [Google Scholar] [CrossRef]
- Yao, J.; Cao, Q.; Ju, Y.; Sun, Y.; Liu, R.; Han, X.; Li, L. Adaptive Actuation of Magnetic Soft Robots Using Deep Rein-forcement Learning. Adv. Intell. Syst. 2023, 5, 2200339. [Google Scholar] [CrossRef]
- Giannaccini, M.E.; Xiang, C.; Atyabi, A.; Theodoridis, T.; Nefti-Meziani, S.; Davis, S.; Shen, Z.; Zhong, H.; Xu, E.; Zhang, R.; et al. Novel Design of a Soft Lightweight Pneumatic Continuum Robot Arm with Decoupled Variable Stiffness and Positioning. Soft Robot. 2018, 5, 54–70. [Google Scholar] [CrossRef]
- Franco, E.; Casanovas, A.G.; Tang, J.; Baena, F.R.Y.; Astolfi, A. Position regulation in Cartesian space of a class of inextensible soft continuum manipulators with pneumatic actuation. Mechatronics 2021, 76, 102573. [Google Scholar] [CrossRef]
- Bruder, D.; Sedal, A.; Vasudevan, R.; Remy, C.D. Force Generation by Parallel Combinations of Fiber-Reinforced Fluid-Driven Actuators. IEEE Robot. Autom. Lett. 2018, 3, 3999–4006. [Google Scholar] [CrossRef]
- Gao, X.; Li, X.; Sun, Y.; Hao, L.; Yang, H.; Xiang, C. Model-Free Tracking Control of Continuum Manipulators with Global Stability and Assigned Accuracy. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1345–1355. [Google Scholar] [CrossRef]
- Veil, C.; Müller, D.; Sawodny, O. Nonlinear disturbance observers for robotic continuum manipulators. Mechatronics 2021, 78, 102518. [Google Scholar] [CrossRef]
- Gonthina, P.S.; Kapadia, A.D.; Godage, I.S.; Walker, I.D. Modeling Variable Curvature Parallel Continuum Robots Using Euler Curves. In Proceedings of the in 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1679–1685. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S.; Theodoridis, T. Novel Design and Position Control Strategy of a Soft Robot Arm. Robotics 2018, 7, 72. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Abbas, K.A.; Al-Atwani, M.; Al-Fahaam, H. Design, Implementation, and Kinematics of a Twisting Robot Continuum Arm Inspired by Human Forearm Movements. Robotics 2022, 11, 55. [Google Scholar] [CrossRef]
- Young, T.R.; Xavier, M.S.; Yong, Y.K.; Fleming, A.J. A control and drive system for pneumatic soft robots: Pneusord. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Spielberg, A.; Du, T.; Hu, Y.; Rus, D.; Matusik, W. Advanced soft robot modeling in ChainQueen. Robotica 2021, 41, 74–104. [Google Scholar] [CrossRef]
- Graule, M.A.; McCarthy, T.P.; Teeple, C.B.; Werfel, J.; Wood, R.J. SoMoGym: A Toolkit for Developing and Evaluating Controllers and Reinforcement Learning Algorithms for Soft Robots. IEEE Robot. Autom. Lett. 2022, 7, 4071–4078. [Google Scholar] [CrossRef]
- Mathew, A.T.; Ben Hmida, I.M.; Armanini, C.; Boyer, F.; Renda, F. SoRoSim: A MATLAB Toolbox for Hybrid Rigid-Soft Robots Based on the Geometric Variable-Strain Approach. IEEE Robot. Autom. Mag. 2022, 30, 2–18. [Google Scholar] [CrossRef]















| Authors | Type of Kinematic | Range of Investigated Pressures/kPa | Type of Manipulator | Number of Chambers | Number of Segments | Object of Study |
|---|---|---|---|---|---|---|
| Lei, et al. [49] | Forward | 0–180 | McKibben pneumatic artificial muscle | 4 | 2 | Stiffness |
| Wang et al. [50] | Forward | 0–35 | Pneumatically driven low-pressure soft actuators (PLSAs) | 3 | 1 | Position, orientation, |
| Al-Ibadi et al. [51] | Forward | 0–500 | Soft extensor continuum arm | 4 | 1 | Length, force, orientation |
| Liu, Z. et al. [52] | Forward | 20–100 | Soft | 3 | 3 | Position |
| Kim, et al. [53] | Forward | 0–30 | Extensor-contractor fabric-based antagonistic actuator | 1 | 1 | Stiffness |
| Peng, Y. et al. [56] | Forward | 15–35 | McKibben pneumatic artificial muscles | 3 | 3 | Position, orientation, forces |
| Kang, et al. [59] | Forward | 60–600 | McKibben pneumatic artificial muscle | 3 | 4 | Position, orientation |
| Godage et al. [61] | Forward, inverse | hydraulic muscle actuators (HMA) | 3 | 3 | Position, orientation | |
| Fernando et al. [65] | Forward, inverse | 0–125 | Reverse Pneumatic Artificial Muscles (RPAMs) | 3 | 1 | Position |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sokolov, O.; Hošovský, A.; Trojanová, M. Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review. Machines 2023, 11, 936. https://doi.org/10.3390/machines11100936
Sokolov O, Hošovský A, Trojanová M. Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review. Machines. 2023; 11(10):936. https://doi.org/10.3390/machines11100936
Chicago/Turabian StyleSokolov, Oleksandr, Alexander Hošovský, and Monika Trojanová. 2023. "Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review" Machines 11, no. 10: 936. https://doi.org/10.3390/machines11100936
APA StyleSokolov, O., Hošovský, A., & Trojanová, M. (2023). Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review. Machines, 11(10), 936. https://doi.org/10.3390/machines11100936