


Evaluation of Different Fault Diagnosis Methods and Their Applications in Vehicle Systems



Abstract
:1. Introduction
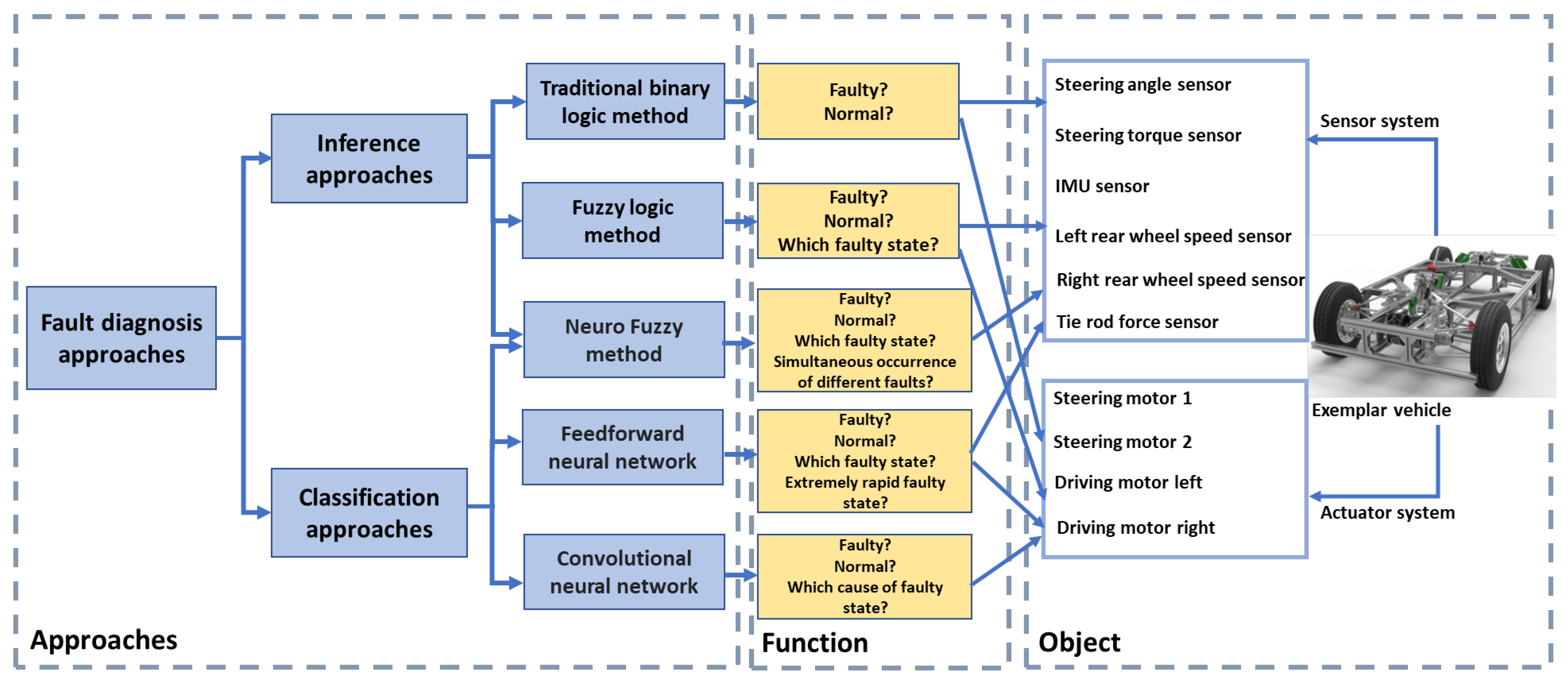
2. Approaches and Exemplar Vehicle Systems
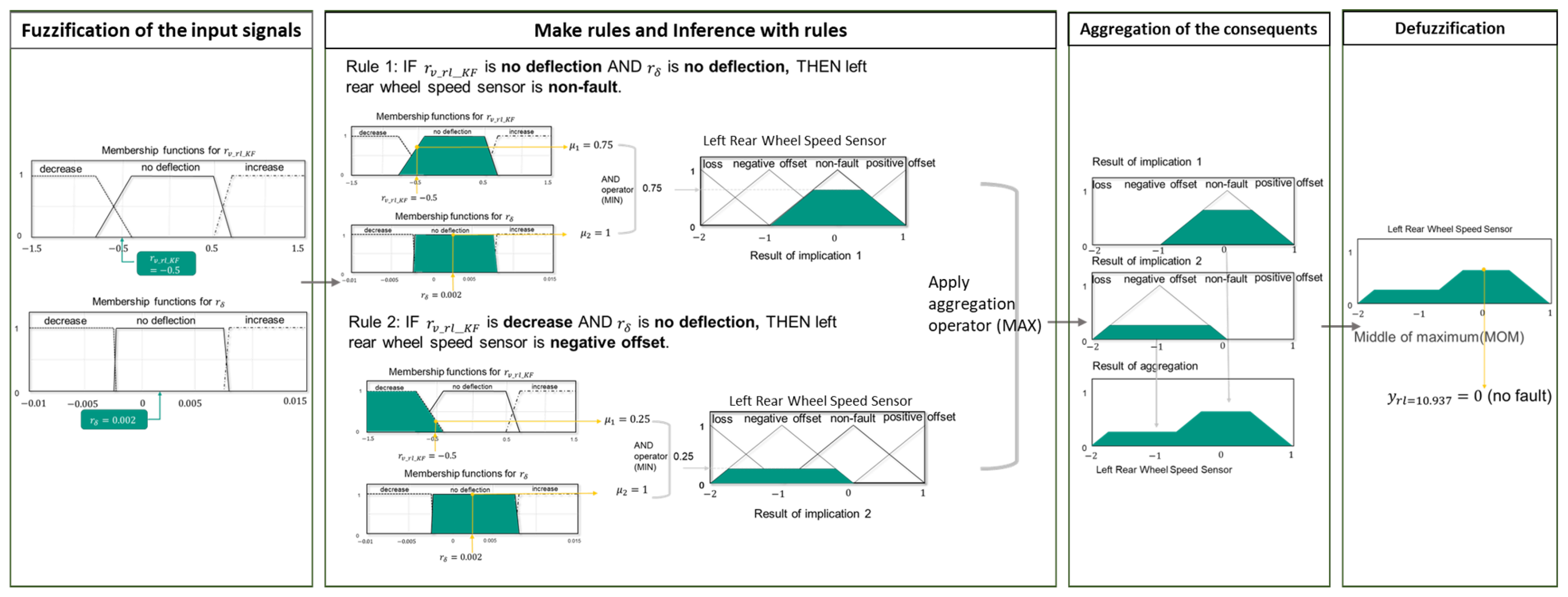
2.1. Fault-Diagnosis Model Architecture Based on Fuzzy-Logic
2.1.1. Fuzzy Logic Diagnosis Algorithm for Exemplar Sensor System
2.1.2. Fuzzy Logic Diagnosis Algorithm for Exemplar Actuator System
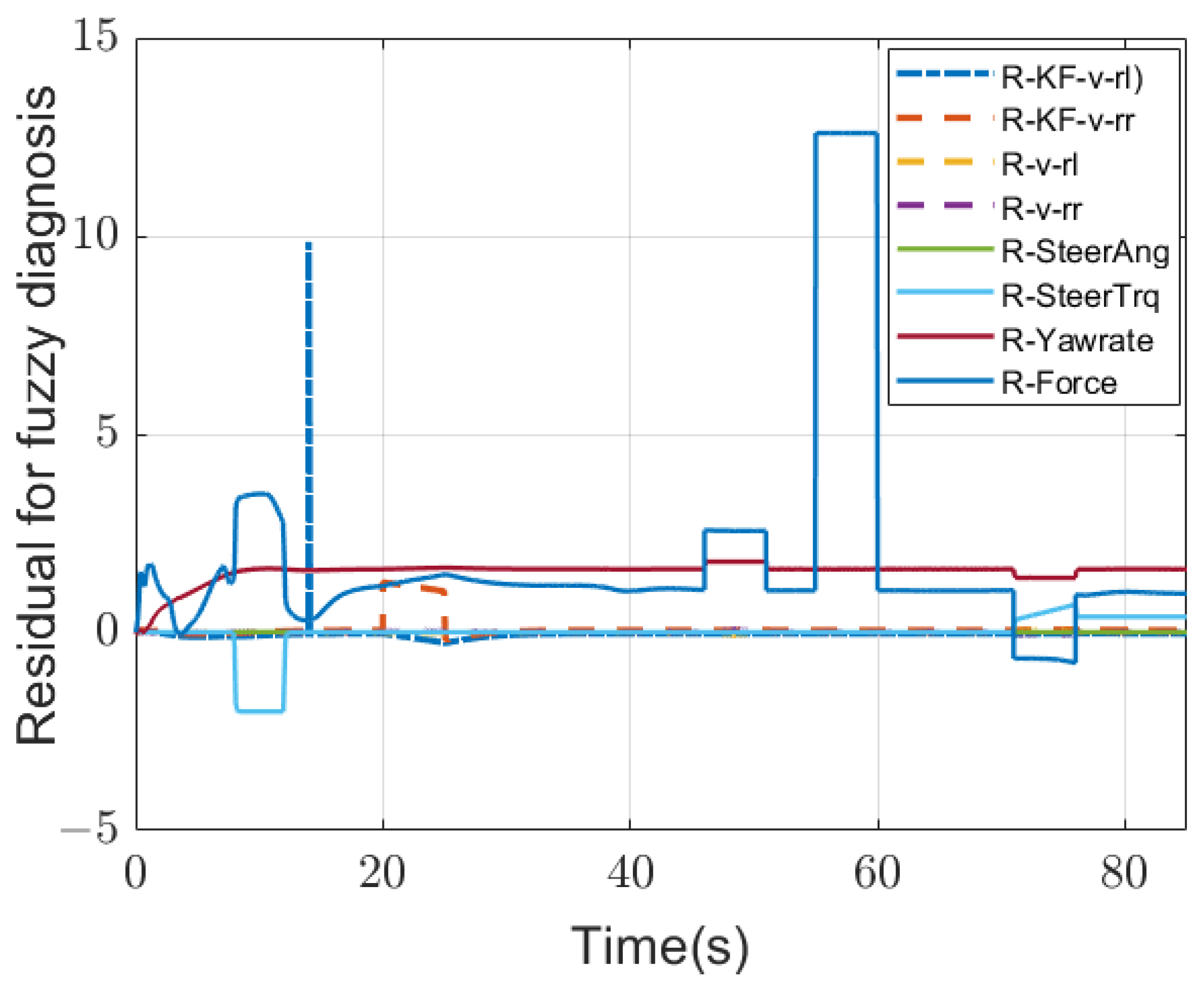
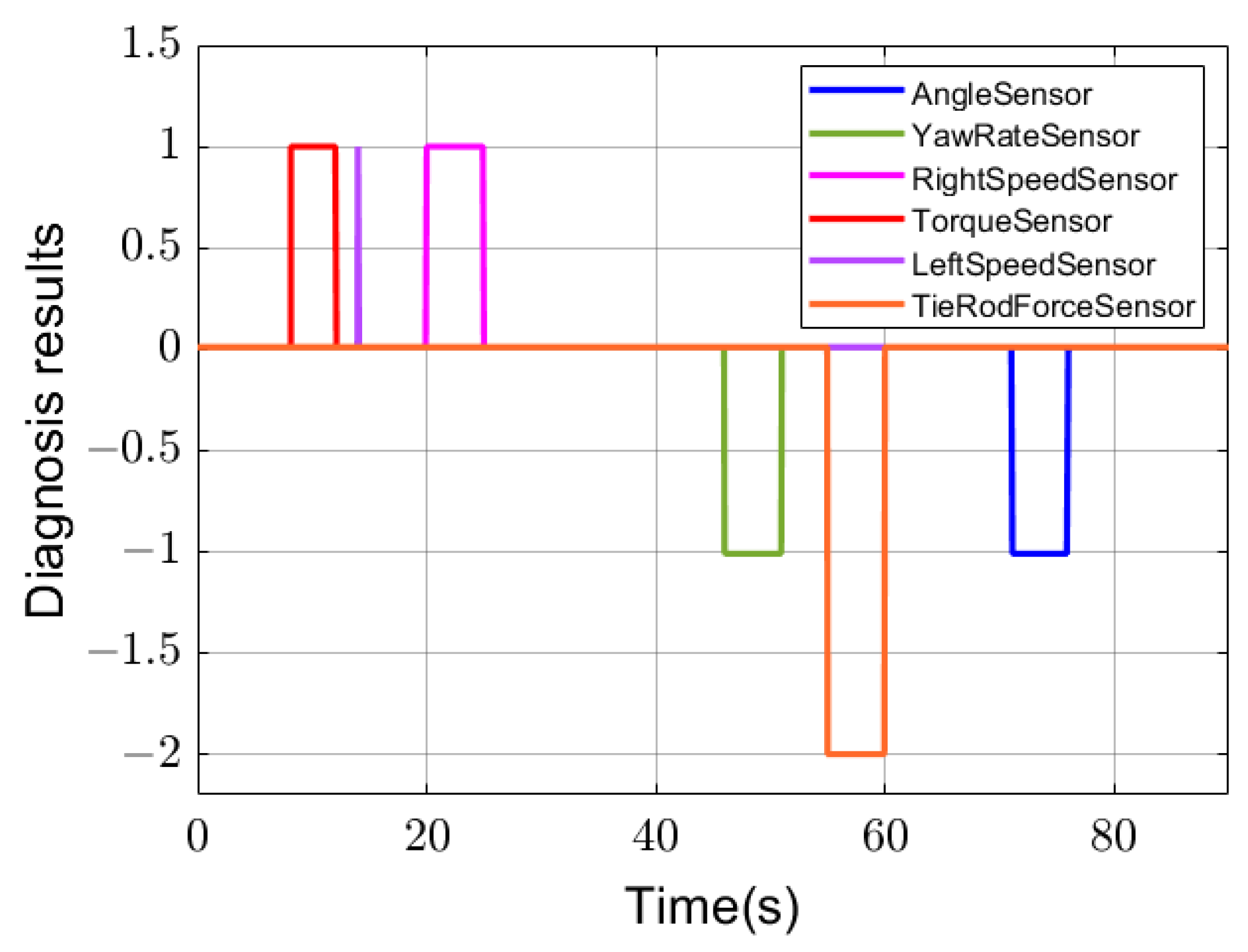
2.1.3. Results of Fuzzy Logic Diagnosis Algorithm
- (1)
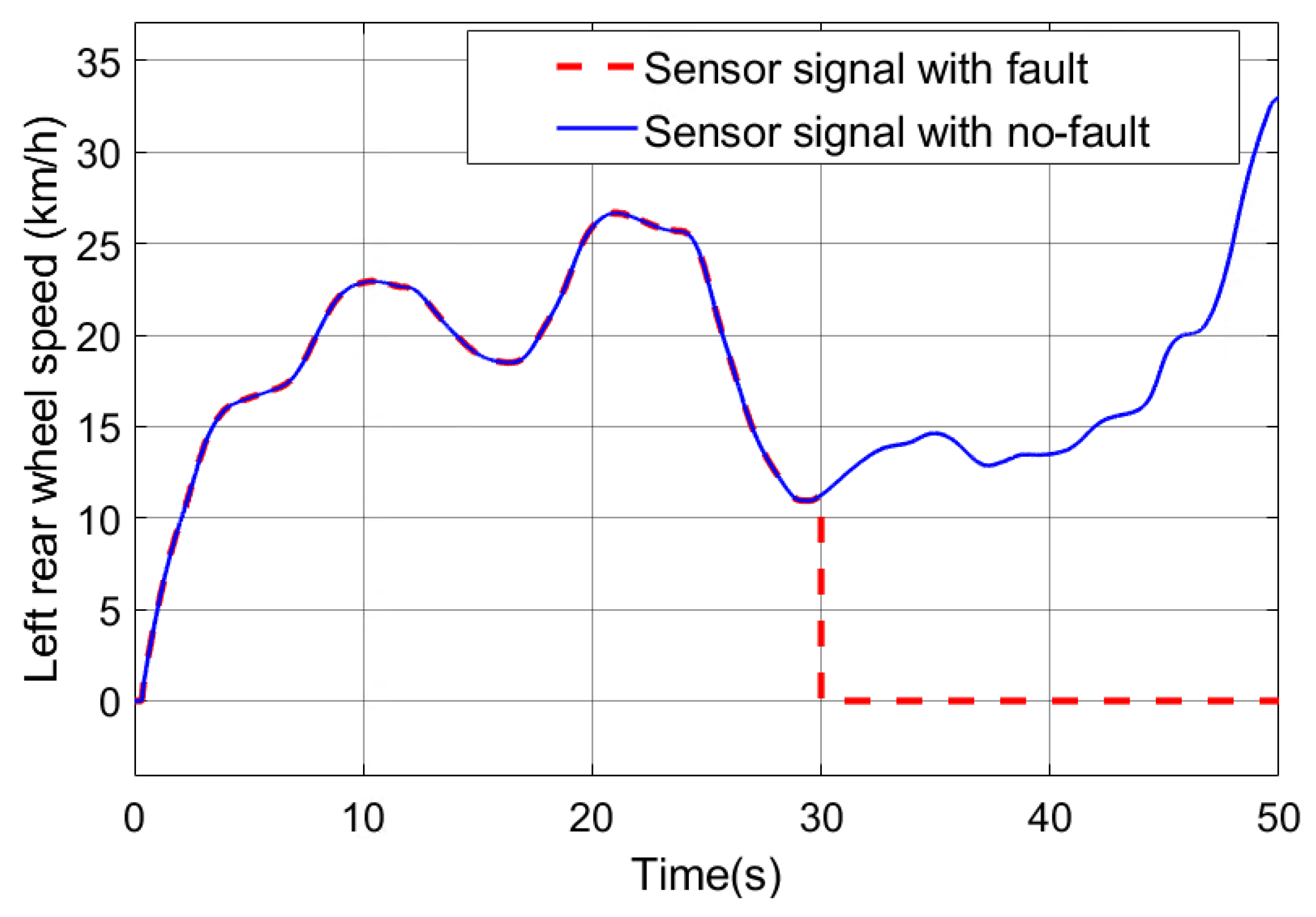
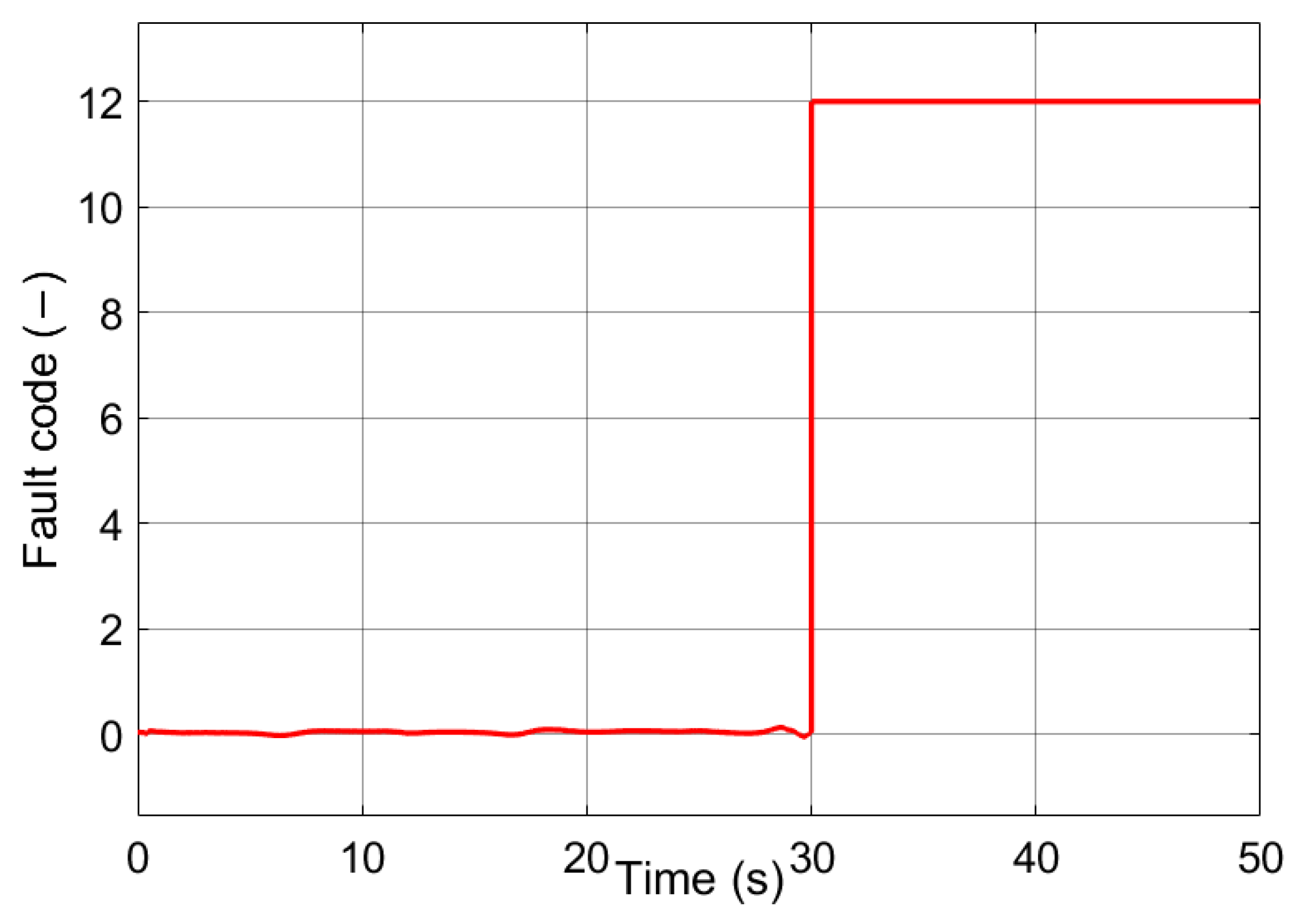
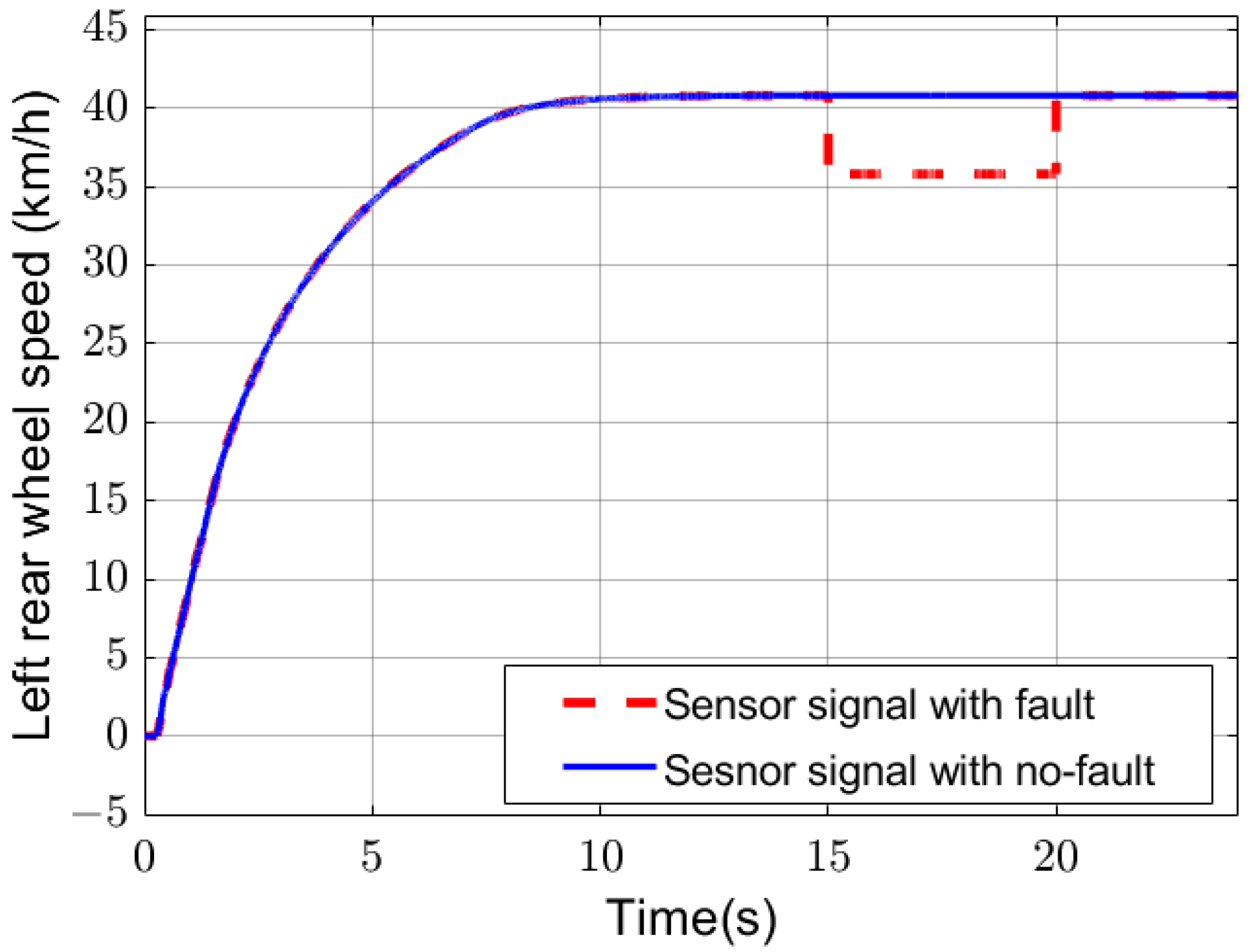
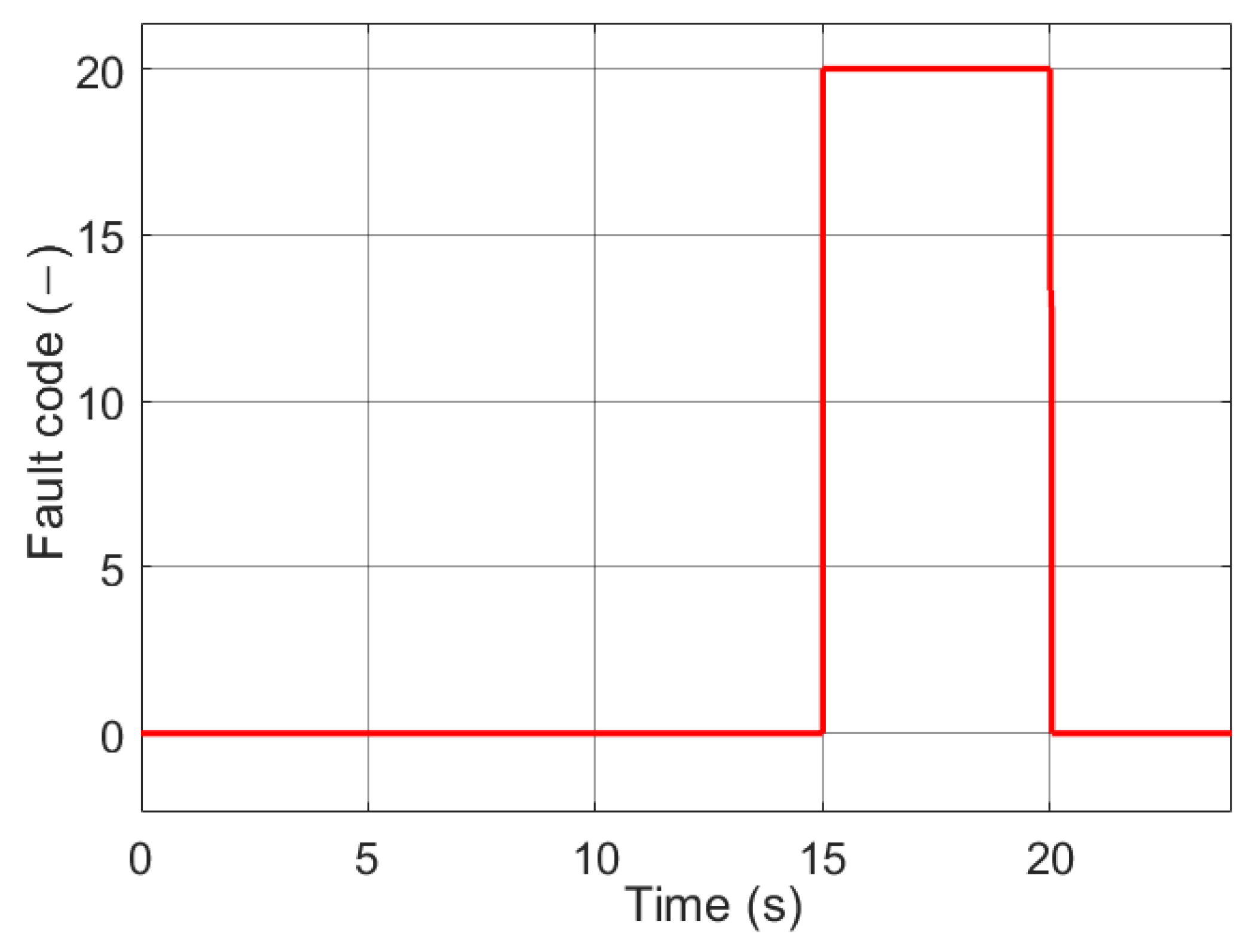
- Case a: Results of Fuzzy Logic Diagnosis For Sensors
- (2)
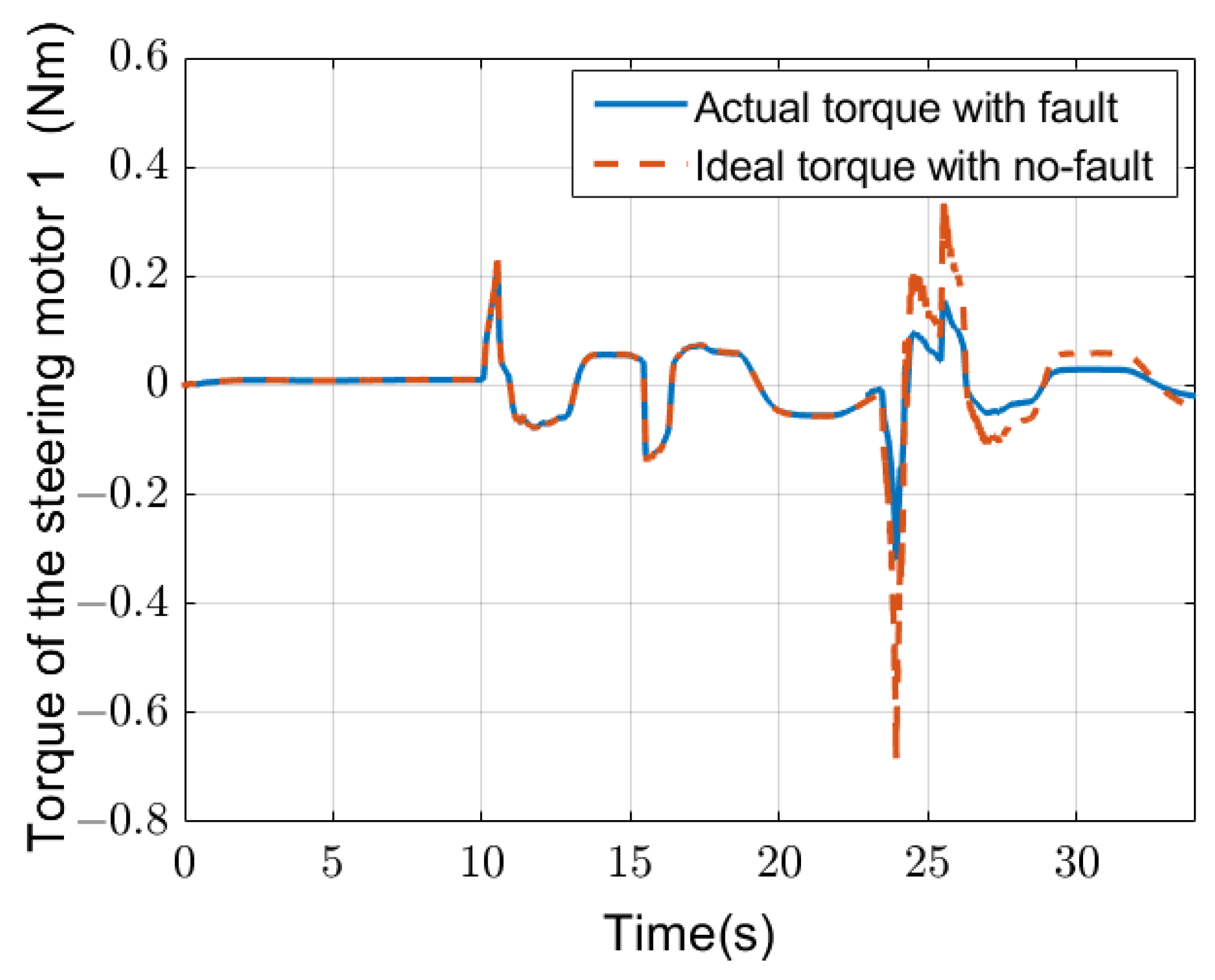
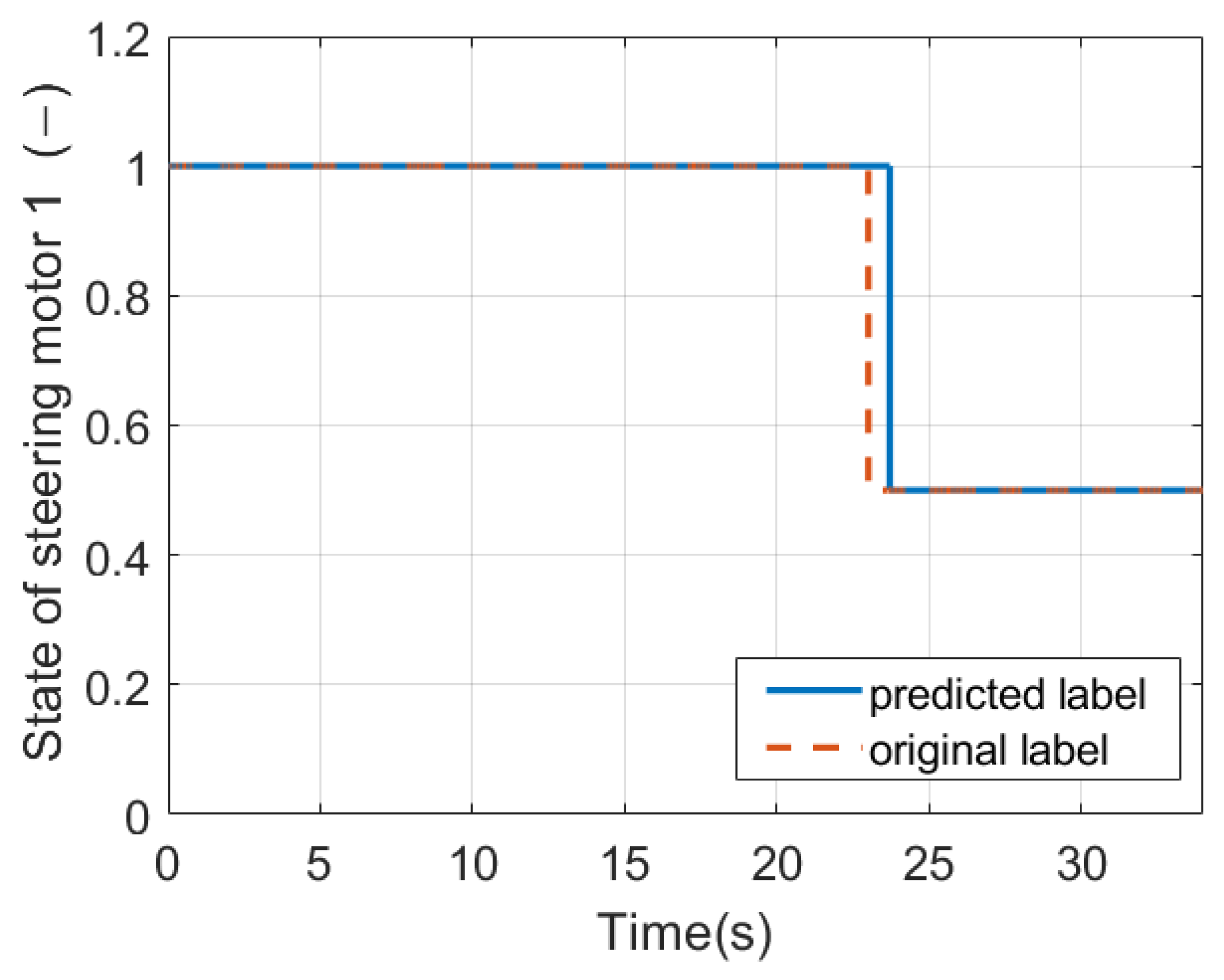
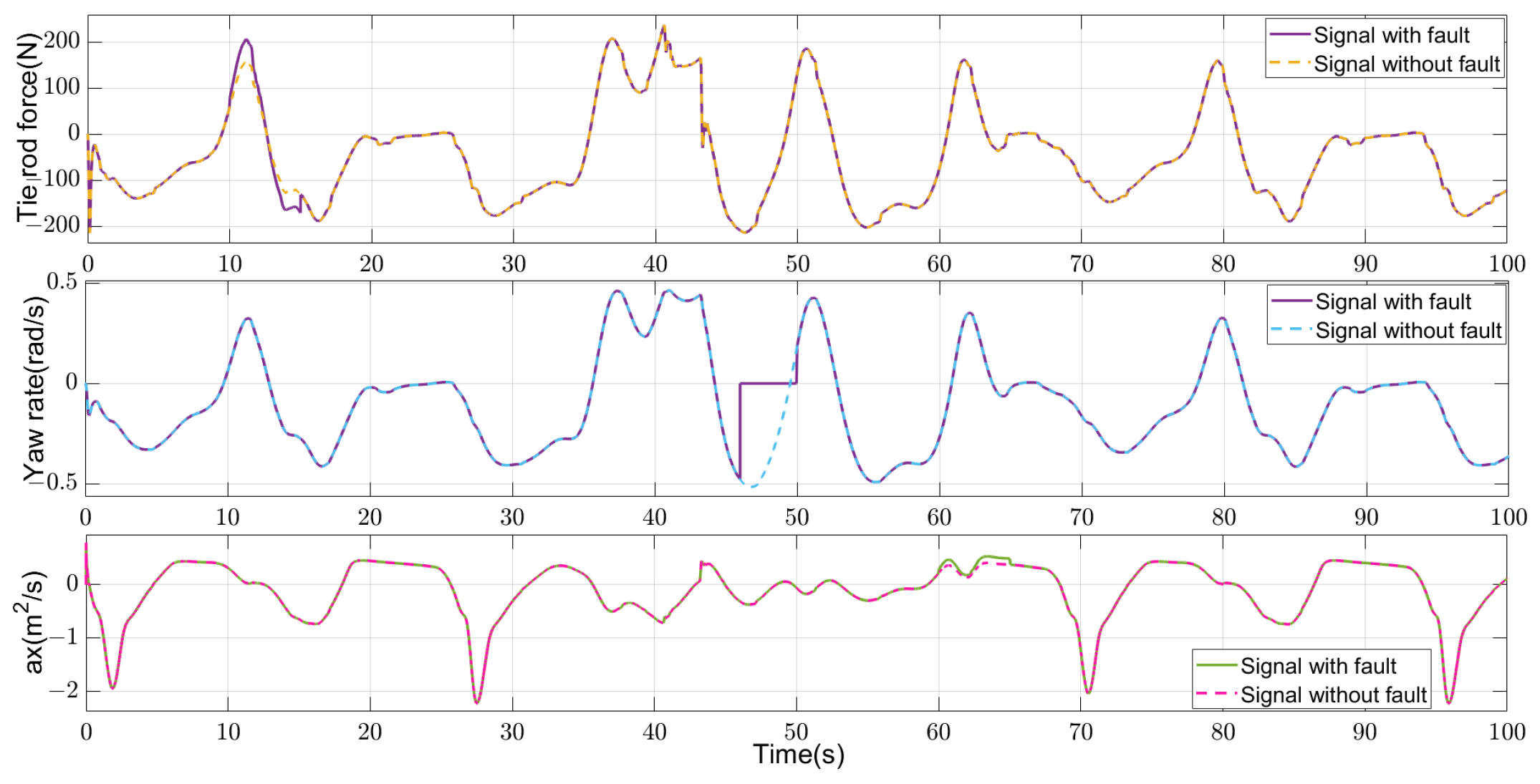
- Case b: Results of Fuzzy Logic Diagnosis For Steering Actuators
2.2. Fault-Diagnosis Model Architecture Based on Neuro-Fuzzy
2.2.1. Neuro-Fuzzy Diagnosis Algorithm for Exemplar Sensor System
2.2.2. Results of Neuro-Fuzzy Diagnosis
- (1)
- Case a: Results of Neuro-Fuzzy Diagnosis For Single Sensor Fault
- (2)
- Case b: Results of Neuro-Fuzzy Diagnosis For Multi-Sensor Faults
2.3. Fault-Diagnosis Model Architecture Based on Neural Networks
2.3.1. Feedforward Networks Diagnosis Algorithm for Exemplar Sensor System
2.3.2. Feedforward Networks Diagnosis Algorithm for Exemplar Actuator System
2.3.3. Results of Neural Networks Diagnosis Algorithm
- (1)
- Case a: Results of Neural Networks Diagnosis Algorithm For Sensors
- (2)
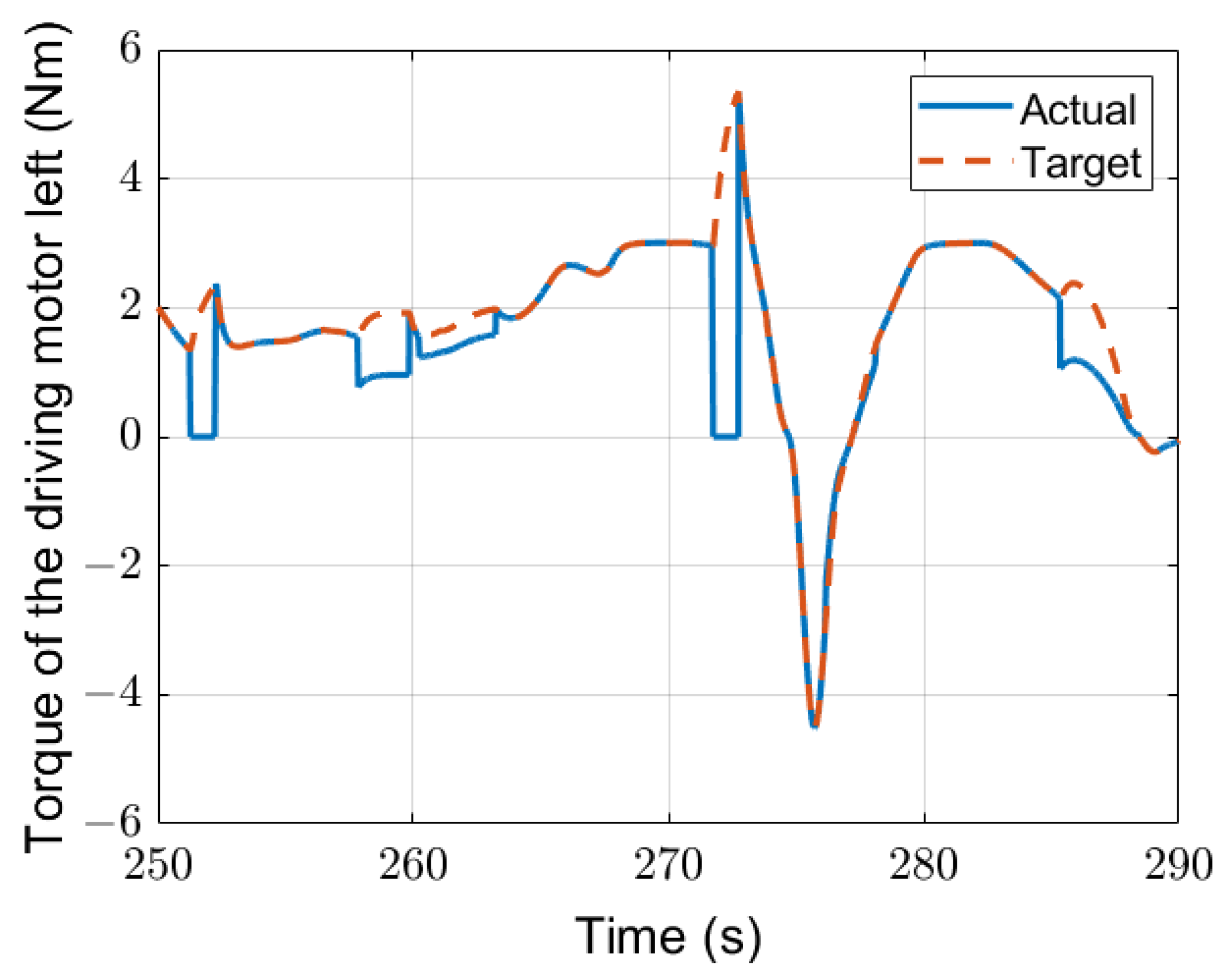
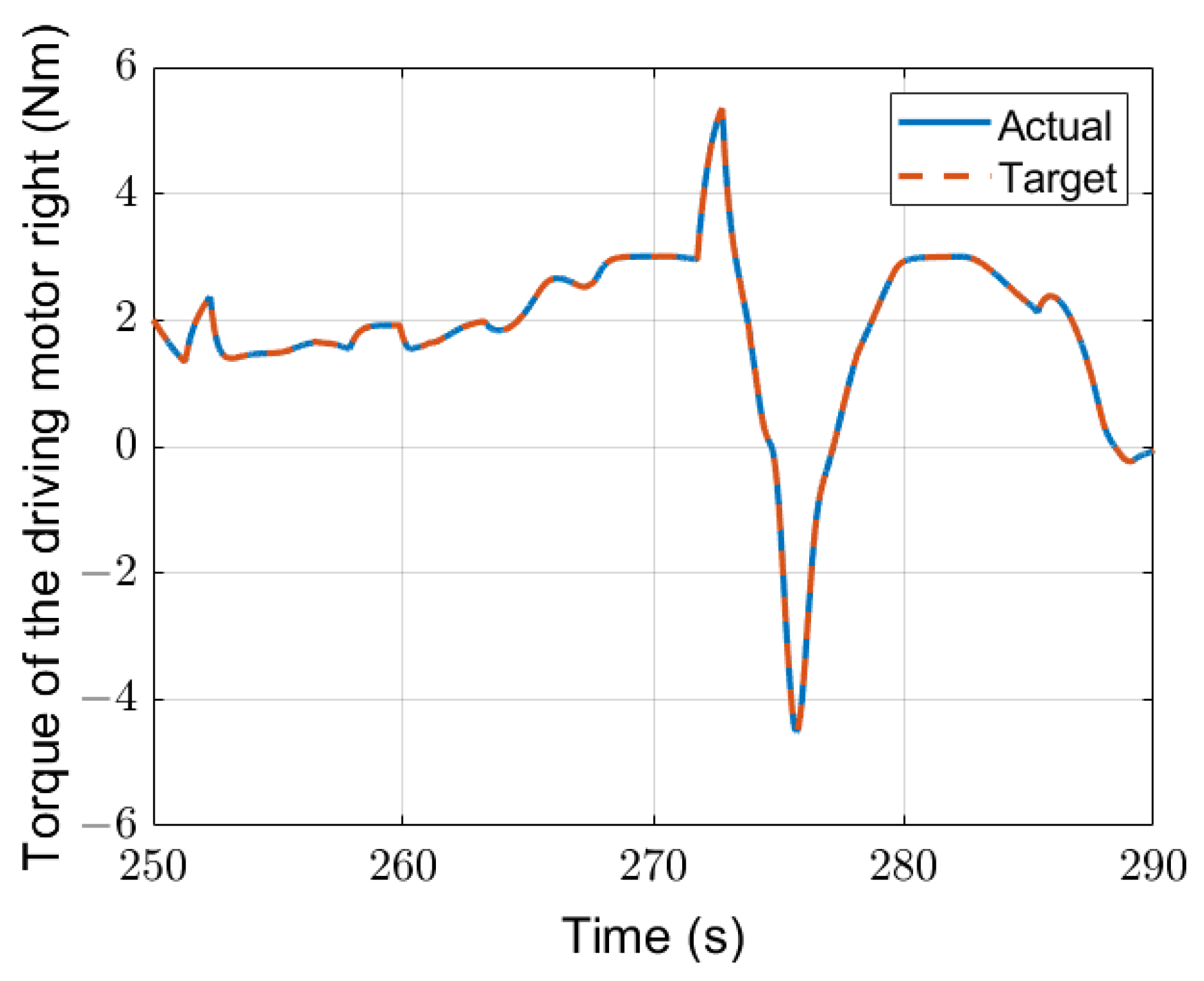
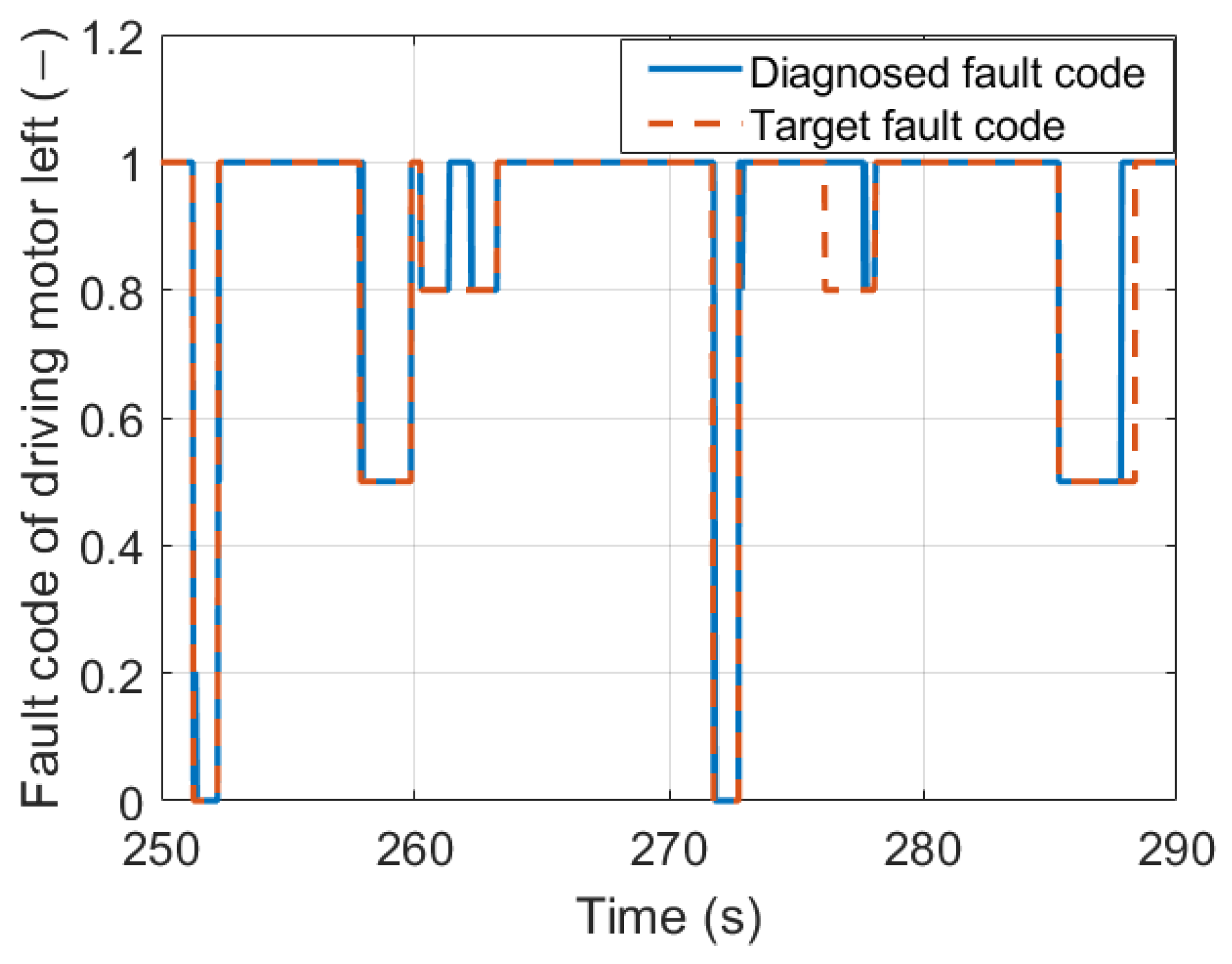
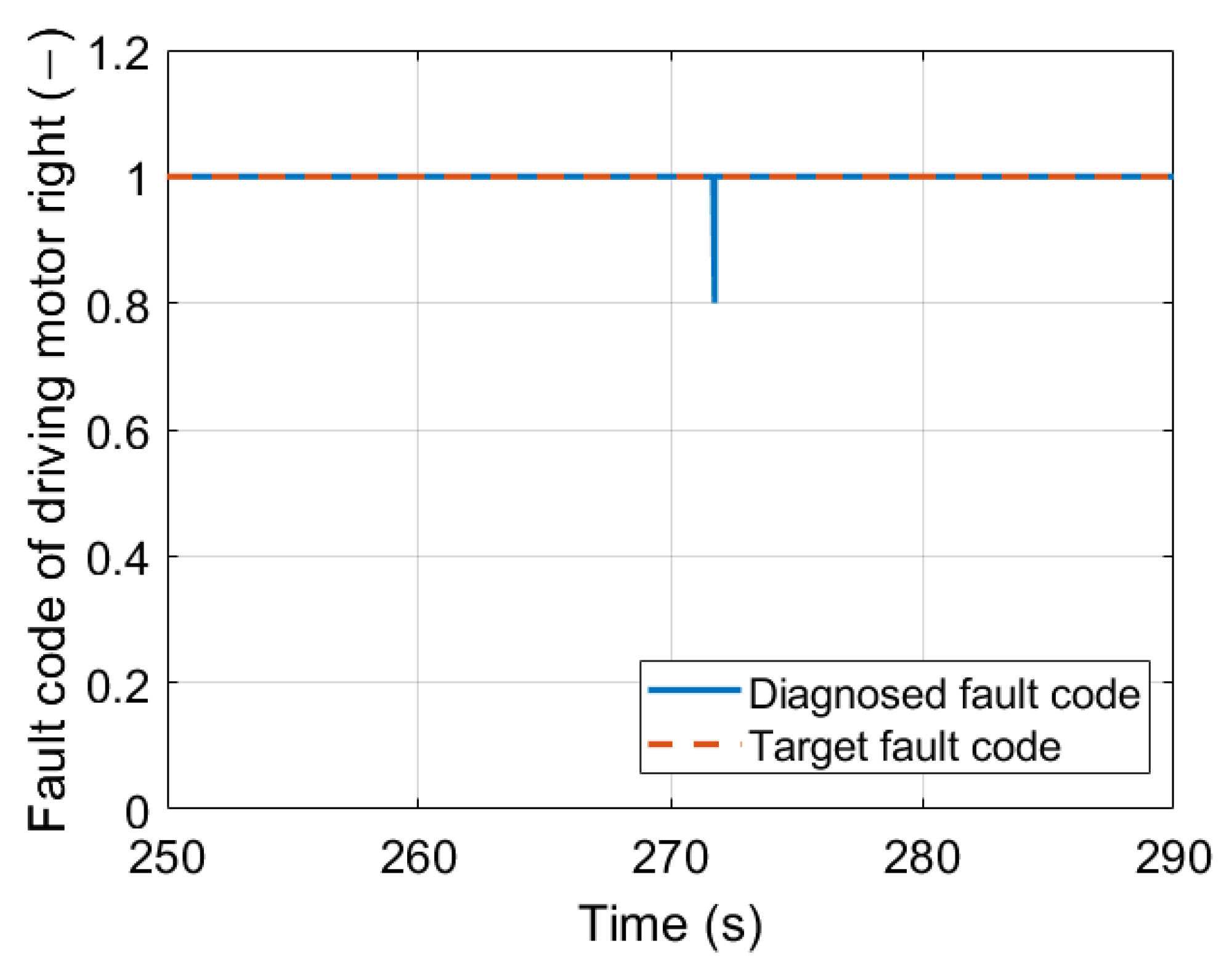
- Case b: Results of Neural Networks Diagnosis Algorithm For Driving Actuators
2.4. Fault-Diagnosis Model Architecture Based on CNN
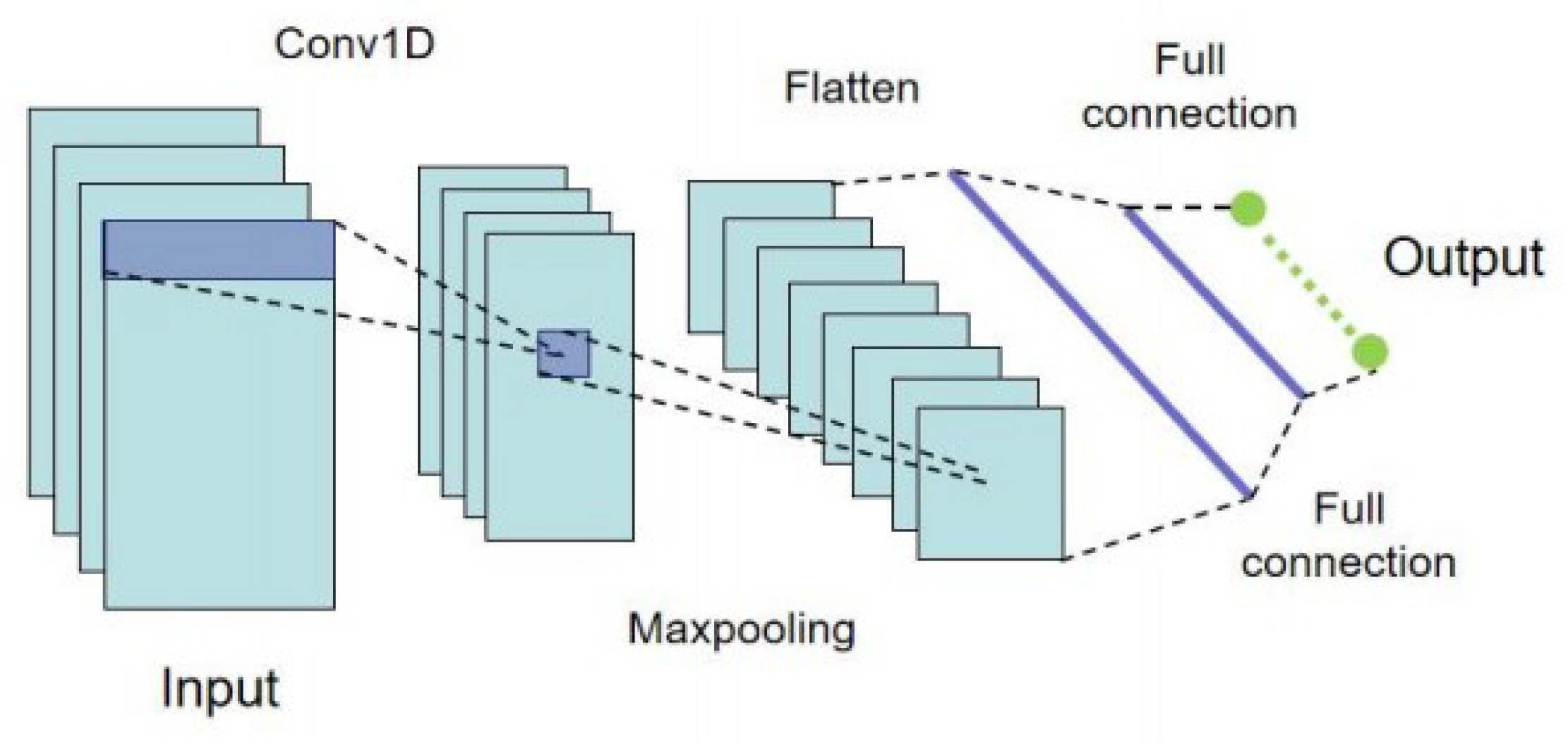
2.4.1. CNN Diagnosis Algorithm for PMSM
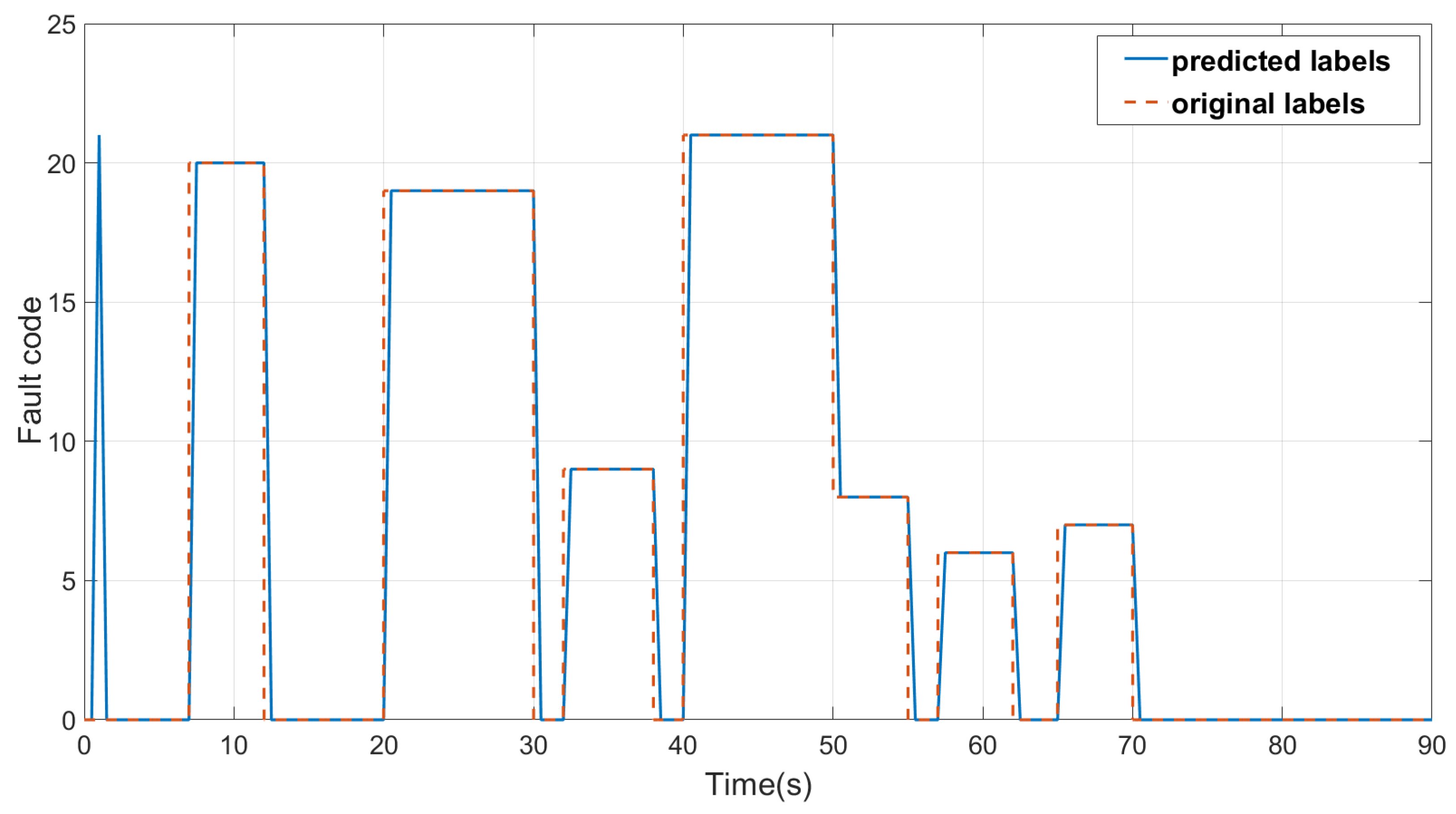
2.4.2. Results of CNN Diagnosis for PMSM Failure Causes
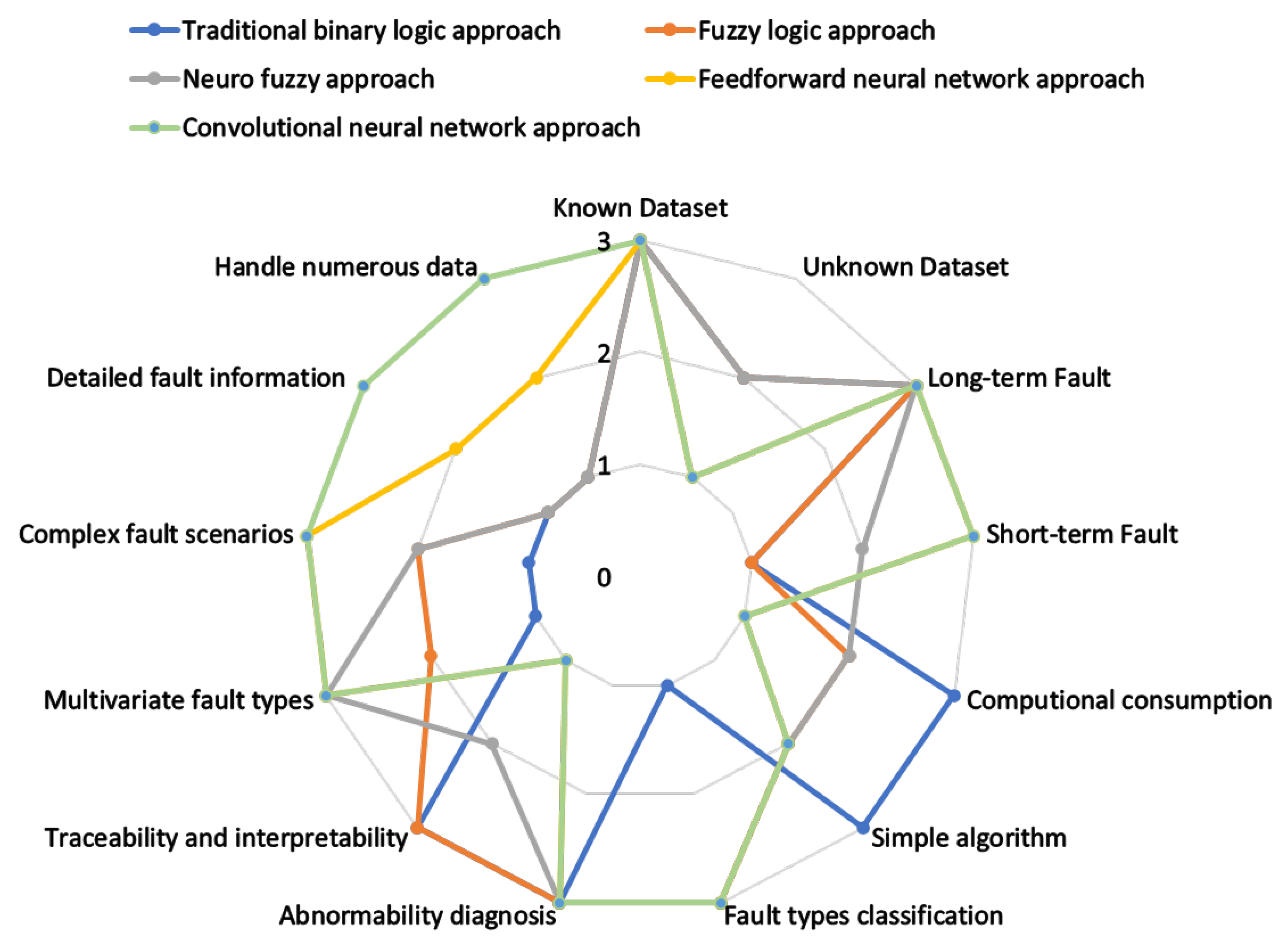
3. Evaluation of the Different Methods
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Positive Offset | Negative Offset | Total Loss | |
|---|---|---|---|
| Steering wheel angle | 1 | 2 | 3 |
| Steering wheel torque | 4 | 5 | 6 |
| Yaw Rate | 7 | 8 | 9 |
| Wheel speed RL | 10 | 11 | 12 |
| Wheel speed RR | 13 | 14 | 15 |
| Tie rod force | 16 | 17 | 18 |
| Yaw Rate (PO) | Yaw Rate (NO) | Yaw Rate (TL) | |
|---|---|---|---|
| Steering wheel angle (PO) | 1 | 2 | 3 |
| Steering wheel angle (NO) | 7 | 8 | 9 |
| Steering wheel angle (TL) | 13 | 14 | 15 |
| Wheel speed RL (PO) | Wheel speed RL (NO) | Wheel speed RL (TL) | |
| Steering wheel torque (PO) | 4 | 5 | 6 |
| Steering wheel torque (NO) | 10 | 11 | 12 |
| Steering wheel torque (TL) | 16 | 17 | 18 |
| Wheel speed RL (PO) | Wheel speed RL (NO) | Wheel speed RL (TL) | |
| Yaw Rate (PO) | 19 | 20 | 21 |
| Yaw Rate (NO) | 22 | 23 | 24 |
| Yaw Rate (TL) | 25 | 26 | 27 |
| Positive Offset | Negative Offset | Total Loss | |
|---|---|---|---|
| Steering wheel angle | 1 | 2 | 3 |
| Steering wheel torque | 4 | 5 | 6 |
| Yaw rate | 7 | 8 | 9 |
| Longitudinal acceleration | 10 | 11 | 12 |
| Wheel speed RL | 13 | 14 | 15 |
| Wheel speed RR | 16 | 17 | 18 |
| Tie rod force | 19 | 20 | 21 |
| Fault Code | Motor Fault Cause |
|---|---|
| 0 | Both motors are working fine |
| 1 | Open switch fault in the inverters of both motors |
| 2 | Short switch fault in the inverters of both motors |
| 3 | Short circuit between phases of both motors |
| 4 | Demagnetization of both motors, the magnetic flux is 20% of the original |
| 5 | Demagnetization of both motors, the magnetic flux is 80% of the original |
| 6 | Open switch fault in the inverter of left motor |
| 7 | Short switch fault in the inverter of left motor |
| 8 | Short circuit between phases of left motor |
| 9 | Demagnetization of left motor, the magnetic flux is 0% of the original |
| 10 | Demagnetization of left motor, the magnetic flux is 20% of the original |
| 11 | Demagnetization of left motor, the magnetic flux is 40% of the original |
| 12 | Demagnetization of left motor, the magnetic flux is 60% of the original |
| 13 | Demagnetization of left motor, the magnetic flux is 80% of the original |
| 14 | Demagnetization of right motor, the magnetic flux is 0% of the original |
| 15 | Demagnetization of right motor, the magnetic flux is 20% of the original |
| 16 | Demagnetization of right motor, the magnetic flux is 40% of the original |
| 17 | Demagnetization of right motor, the magnetic flux is 60% of the original |
| 18 | Demagnetization of right motor, the magnetic flux is 80% of the original |
| 19 | Open switch fault in the inverter of right motor |
| 20 | Short switch fault in the inverter of right motor |
| 21 | Short circuit between phases of right motor |
References
- Castillo, I.; Edgar, T. Model based fault detection and diagnosis. In Proceedings of the TWCCC Conference, Austin, TX, USA, 4–5 February 2008. [Google Scholar]
- Meskin, N.; Khorasani, K. Fault Detection and Isolation: Multi-Vehicle Unmanned Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Bergman, S.; Astrom, K. Fault detection in boiling water reactors by noise analysis. In Proceedings of the 5th Power Plant Dynamics, Control and Testing Symposium, Knoxville, TN, USA, 21–23 March 1983. [Google Scholar]
- Moseler, O.; Heller, T.; Isermann, R. Model-based fault detection for an actuator driven by a brushless DC motor. IFAC Proc. Vol. 1999, 32, 7873–7878. [Google Scholar] [CrossRef]
- Kulkarni, M.; Abou, S.C.; Stachowicz, M. Fault detection in hydraulic system using fuzzy logic. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 20–22 October 2009; pp. 20–22. [Google Scholar]
- Fischer, D.; Börner, M.; Schmitt, J.; Isermann, R. Fault detection for lateral and vertical vehicle dynamics. Control Eng. Pract. 2007, 15, 315–324. [Google Scholar] [CrossRef]
- Hussain, M.; Hassan, C.C.; Loh, K.; Mah, K. Application of artificial intelligence techniques in process fault diagnosis. J. Eng. Sci. Technol. 2007, 2, 260–270. [Google Scholar]
- Saxena, A.; Saad, A. Fault diagnosis in rotating mechanical systems using self-organizing maps. In Artificial Neural Networks in Engineering (ANNIE04); Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Panoiu, M.; Panoiu, C.; Lihaciu, I. Adaptive neuro fuzzy system for modelling and prediction of distance pantograph catenary in railway transportation. In Proceedings of the Materials Science and Engineering; IOP Conference Series; IOP Publishing: Bristol, UK, 2018; Volume 294, p. 012073. [Google Scholar]
- Ballal, M.S.; Khan, Z.J.; Suryawanshi, H.M.; Sonolikar, R.L. Adaptive neural fuzzy inference system for the detection of inter-turn insulation and bearing wear faults in induction motor. IEEE Trans. Ind. Electron. 2007, 54, 250–258. [Google Scholar] [CrossRef]
- Neue Methoden zur Zuverlässigkeitssteigerung von Hochautomatisierten Elektrischen Fahrzeugen (SmartLoad); Teilvorhaben: Szenarienbasierte Validierung von Hochautomatisierten Elektrischen Fahrzeugen. Available online: https://www.tib.eu/de/suchen/id/TIBKAT:1814793585/Neue-Methoden-zur-Zuverl%C3%A4ssigkeitssteigerung-von?cHash=ef5a165fa06a70762814601fc3ec1126/ (accessed on 27 September 2022).
- Luo, H. Method Development for Fault Detection of Sensors in a Demonstrator Vehicle. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2021. [Google Scholar]
- Meng, F. Modellbasierte Fehlererkennung der Aktoren eines Elektrischen Automatisierten Fahrzeugs. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2021. [Google Scholar]
- Feng, Y. Optimization of the Robustness of a Holistic Fault Diagnosis System for an Electric and Automated Vehicle. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2021. [Google Scholar]
- Hong, X. Validierung und Bewertung der Funktion Einer Fehlerdiagnosemethode. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2022. [Google Scholar]
- Li, J. Implementation of AI Methods in a Holistic Fault Diagnosis System for an Electric and Automated Vehicle. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2022. [Google Scholar]
- Yang, Z. Optimization of the Model-Based Fault Detection and Fuzzy-Logic-Based Fault Diagnosis of Sensors in a Demonstrator Vehicle. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2021. [Google Scholar]
- Li, S.; Frey, M.; Gauterin, F. Model-Based Condition Monitoring of the Sensors and Actuators of an Electric and Automated Vehicle. Sensors 2023, 23, 887. [Google Scholar] [CrossRef] [PubMed]
- Zadeh, L.A. Fuzzy sets. In Fuzzy Sets, Fuzzy Logic, and Fuzzy Systems: Selected Papers by Lotfi A Zadeh; World Scientific: Singapore, 1996; pp. 394–432. [Google Scholar]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning—I. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Simani, S.; Fantuzzi, C.; Spina, R. Application of a neural network in gas turbine control sensor fault detection. In Proceedings of the International Conference on Control Applications (Cat. No. 98CH36104), Trieste, Italy, 4 September 1998; pp. 182–186. [Google Scholar]
- Fuente, M.; Represa, C. A comparative study of neural networks based approach for fault detection. IFAC Proc. Vol. 1997, 30, 471–476. [Google Scholar] [CrossRef]
- Minsky, M.; Papert, S. Perceptrons; MITT Press: Cambridge MA, USA, 1969. [Google Scholar]
- Wu, X. Method Development for Diagnosing the Causes of Faults in a PMSM. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2022. [Google Scholar]




















| Range of Influence | Squash Factor | Accept Ratio | Reject Ratio | MF number | RMSE |
|---|---|---|---|---|---|
| 0.5 | 1.25 | 0.5 | 0.15 | 7 | 1.056 |
| 0.3 | 1.25 | 0.5 | 0.15 | 15 | 0.389 |
| 0.2 | 1.25 | 0.5 | 0.15 | 23 | 0.163 |
| 0.1 | 1.25 | 0.5 | 0.15 | 24 | 0.106 |
| 0.1 | 1.25 | 0.5 | 0.1 | 26 | 0.027 |
| Traditional Binary Logic Fault Diagnosis | Fuzzy Logic Fault Diagnosis | Neuro-Fuzzy Fault Diagnosis | Feedforward Neural Network Fault Diagnosis | Convolutional Neural Network Fault Diagnosis | |
|---|---|---|---|---|---|
| Simple algorithm | √ | × | × | × | × |
| Assess system abnormality | √ | √ | √ | √ | √ |
| Identify fault type and severity | × | √ | √ | √ | √ |
| Traceability and interpretability | √ | √ | - | × | × |
| Model-building time consumption | × | × | × | √ | √ |
| Inference rule objectivity | - | × | - | √ | √ |
| Manage confusing fault messages | × | √ | √ | √ | √ |
| Various inferences | × | √ | √ | √ | √ |
| Experts needed | √ | × | × | × | × |
| Auto-adjust model parameters | × | × | √ | √ | √ |
| Requires numerous data | √ | √ | × | × | × |
| Needs particular computational resources | √ | √ | × | × | × |
| Handle non-linear fault conditions | × | - | √ | √ | √ |
| Complex failure scenarios | × | √ | √ | √ | √ |
| Multivariate failure management | × | √ | √ | √ | √ |
| Situations needing a clear diagnosis inference | √ | √ | - | × | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Frey, M.; Gauterin, F. Evaluation of Different Fault Diagnosis Methods and Their Applications in Vehicle Systems. Machines 2023, 11, 482. https://doi.org/10.3390/machines11040482
Li S, Frey M, Gauterin F. Evaluation of Different Fault Diagnosis Methods and Their Applications in Vehicle Systems. Machines. 2023; 11(4):482. https://doi.org/10.3390/machines11040482
Chicago/Turabian StyleLi, Shiqing, Michael Frey, and Frank Gauterin. 2023. "Evaluation of Different Fault Diagnosis Methods and Their Applications in Vehicle Systems" Machines 11, no. 4: 482. https://doi.org/10.3390/machines11040482
APA StyleLi, S., Frey, M., & Gauterin, F. (2023). Evaluation of Different Fault Diagnosis Methods and Their Applications in Vehicle Systems. Machines, 11(4), 482. https://doi.org/10.3390/machines11040482