
Survey on Physiological Computing in Human–Robot Collaboration


Abstract
:1. Introduction
- Presenting a comprehensive overview of the latest research in physiological computing.
- Classifying the research based on the questionnaire approach and physiological signals used.
- Providing an in-depth analysis of widely used physiological signals and their characteristics.
- Discussing common data collection techniques and data labeling techniques.
2. Methodology
- Literature: A systematic review of the literature was conducted to identify all of the relevant research studies in the field of human–robot collaboration. The search was conducted using various academic databases. The search terms used included “human–robot collaboration”, “physiological signals”, “data collection methods”, and “labeling techniques”.
- Categorization: All of the identified articles were screened based on their relevance to the study objective. The articles that met the inclusion criteria were further analyzed, and data were extracted related to physiological signals, stimuli types, data collection methods, labeling techniques, algorithms, and their applications. The extracted data were then categorized based on the identified criteria.
- Limitations: The study has some limitations; we include articles that we do have access to, which may have limited the comprehensiveness of the study. Additionally, the study only focused on physiological signals and did not consider other modalities used in human–robot collaboration.
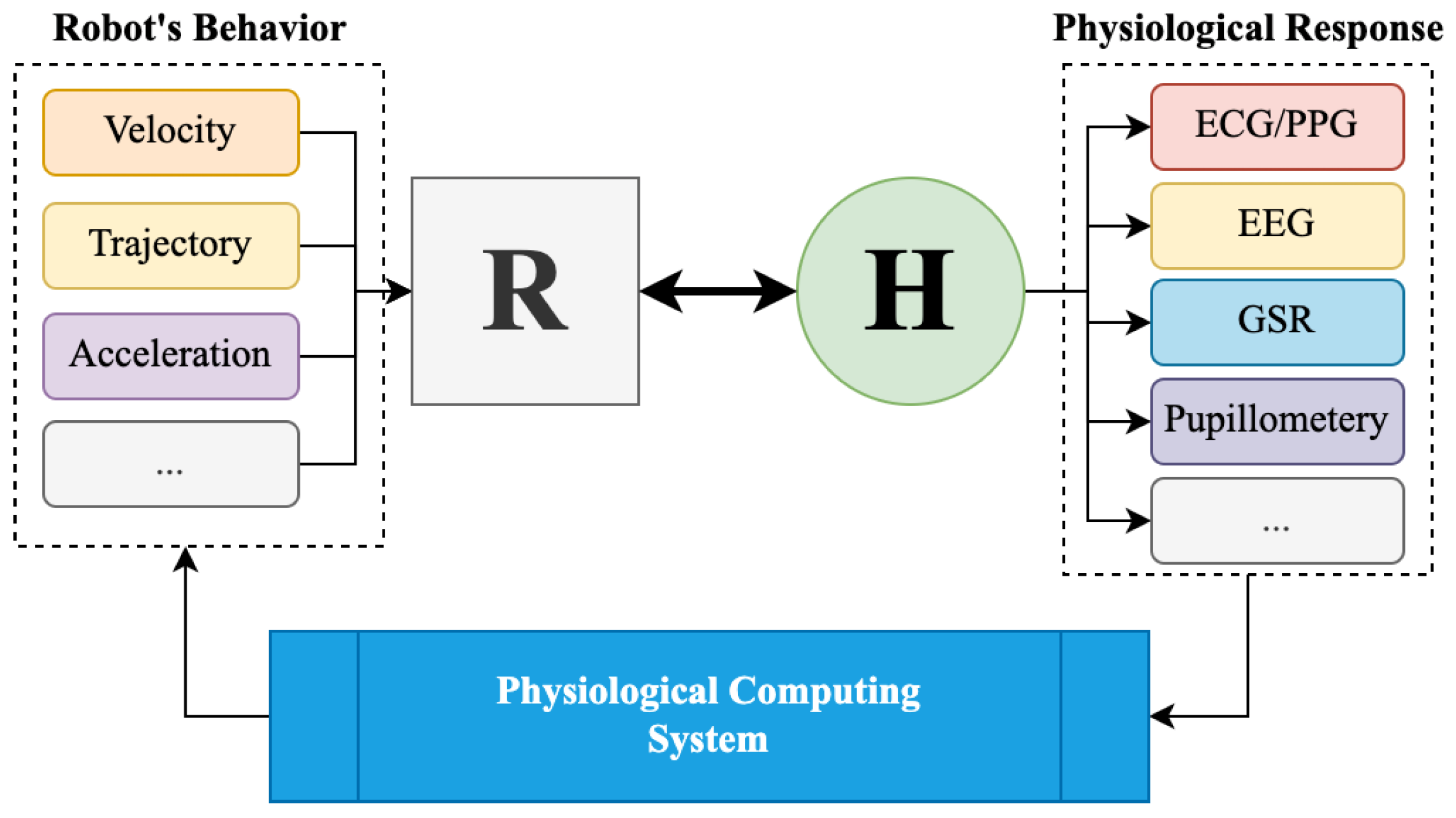
3. Physiological Computing
4. Physiological Signals
4.1. Electroencephalogram (EEG)
4.2. Electrocardiogram (ECG)
4.3. Photoplethysmography (PPG)
4.4. Galvanic Skin Response/Electrodermal Activity
4.5. Pupil Dilation/Gaze Tracking
4.6. Electromyography (EMG)
4.7. Physiological Signal Features
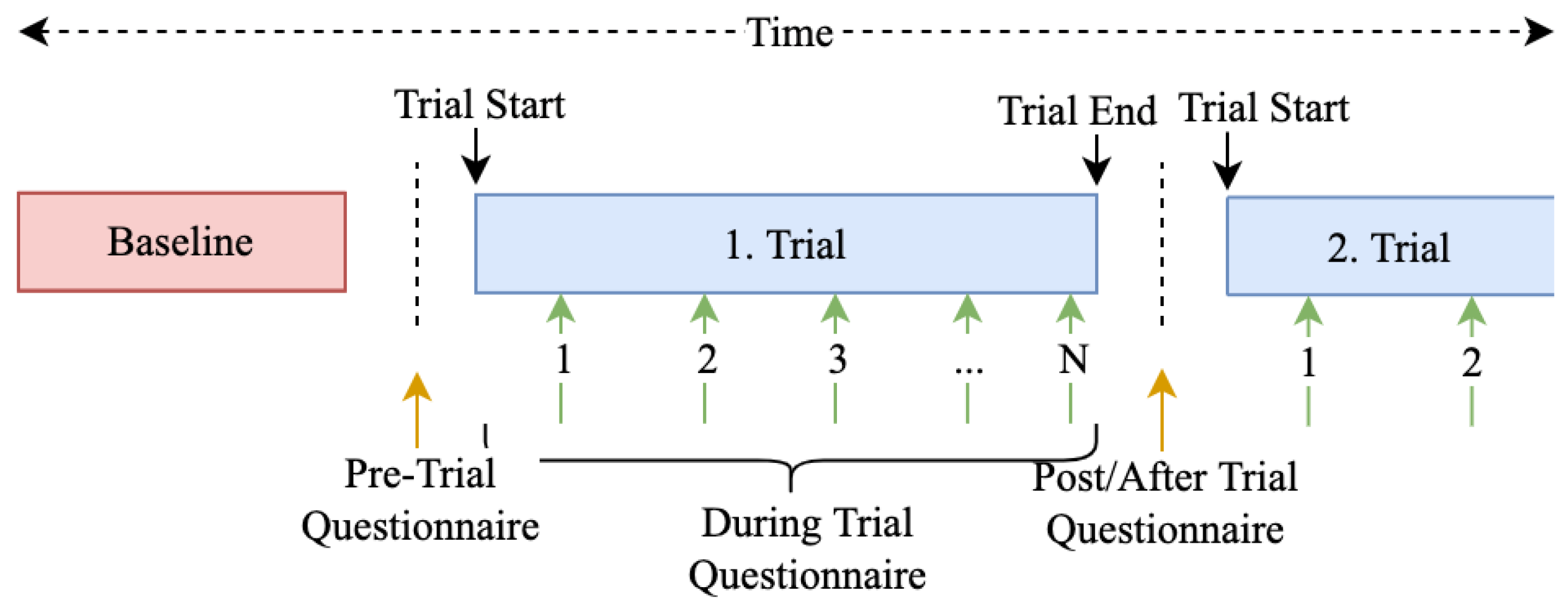
5. Data Collection Methods
5.1. Baseline
5.2. Pre-Trial
5.3. Post/After Trial
5.4. During Trial
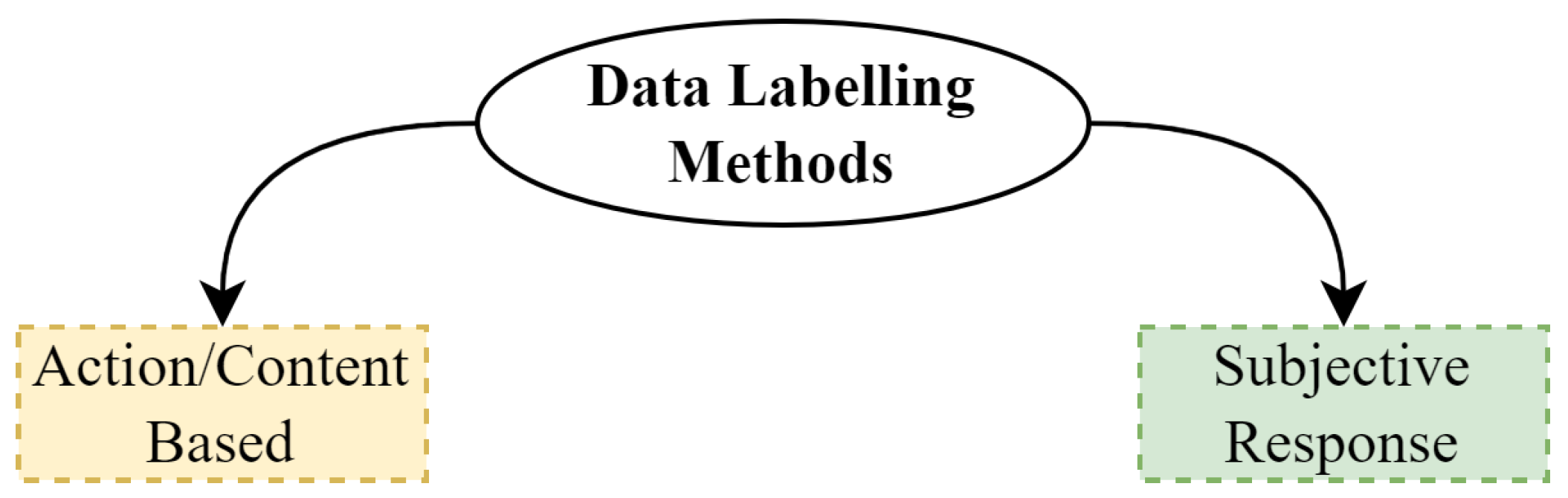
6. Data Labeling
6.1. Action/Content-Related Labeling
6.2. Subjective Labeling
- Godspeed was designed to standardize measurement tools for HRI by Bartneck et al. [44]. Godspeed focused on five measurements: anthropomorphism, adaptiveness, intelligence, safety, and likability. Godspeed is commonly used, and it has been translated into different languages.
- NASA TLX was designed to measure subjective workload assessment. It is widely used in cognitive experiments. The NASA TLX measures six metrics: mental demand, physical demand, temporal demand, performance, effort, and frustration [45].
- BEHAVE-II was developed for the assessment of robot behavior [46]. It measures the following metrics: anthropomorphism, attitude towards technology, attractiveness, likability, and trust.
- Multidimensional Robot Attitude Scale (MRAS) is a 12-dimensional questionnaire was developed by Ninomiya et al. [47]. The MRAS measures a variety of metrics such as familiarity, ease of use, interest, appearance, and social support.
- Self-Assessment Manikin Instrument (SAM) consists of 18 questions that measure three metrics of pleasure, arousal, dominance [48]. Unlike most surveys, the SAM uses a binary selection of two opposite emotions: calm vs. excited, unhappy vs. happy, etc.
- Negative Attitude toward Robots Scale (NARS), developed to measure negative attitudes toward robots in terms of negative interaction with robots, social influence, and emotions in interaction with robots. Moreover, the NARS measures discomfort, anxiety, trust, etc. [49].
- Robot Social Attributes Scale (RoSAS) is a survey that seeks to extract metrics of social perception of a robot such as warmth, competence, and discomfort [50].
- STAXI-2 consists of 44 questions that measure state anger, trait anger, and anger expression [51].
7. Relevant Works
8. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IFR. World Robotics Report 2020; Technical Report. Available online: https://ifr.org/ifr-press-releases/news/record-2.7-million-robots-work-in-factories-around-the-globe (accessed on 27 April 2023).
- Korus, S. Industrial Robot Cost Declines Should Trigger Tipping Points in Demand; Technical Report. Available online: https://ark-invest.com/articles/analyst-research/industrial-robot-cost-declines/ (accessed on 27 April 2023).
- ISO/TS 15066:2016; Robots And Robotic Devices-Collaborative Robots. ISO: Geneva, Switzerland, 2016.
- Kumar, S.; Savur, C.; Sahin, F. Survey of Human–Robot Collaboration in Industrial Settings: Awareness, Intelligence, and Compliance. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 280–297. [Google Scholar] [CrossRef]
- Fairclough, S.H. Fundamentals of physiological computing. Interact. Comput. 2009, 21, 133–145. [Google Scholar] [CrossRef]
- NSF. Information and Intelligent Systems (IIS): Core Programs. Available online: https://www.nsf.gov/pubs/2018/nsf18570/nsf18570.htm (accessed on 27 April 2023).
- Kulic, D.; Croft, E.A. Anxiety detection during human–robot interaction. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 616–621. [Google Scholar] [CrossRef]
- Kulić, D.; Croft, E. Physiological and subjective responses to articulated robot motion. Robotica 2007, 25, 13–27. [Google Scholar] [CrossRef]
- Tiberio, L.; Cesta, A.; Belardinelli, M. Psychophysiological Methods to Evaluate User’s Response in Human Robot Interaction: A Review and Feasibility Study. Robotics 2013, 2, 92–121. [Google Scholar] [CrossRef]
- Fairclough, S.H. Physiological Computing and Intelligent Adaptation. In Emotions and Affect in Human Factors and Human–Computer Interaction; Number 2017; Elsevier: Amsterdam, The Netherlands, 2017; pp. 539–556. [Google Scholar] [CrossRef]
- Savur, C.; Sahin, F. Real-Time American Sign Language Recognition System Using Surface EMG Signal. In Proceedings of the 2015 IEEE 14th International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 9–11 December 2015; pp. 497–502. [Google Scholar] [CrossRef]
- Musk, E. An integrated brain-machine interface platform with thousands of channels. J. Med. Internet Res. 2019, 21, 1–14. [Google Scholar] [CrossRef]
- Hughes, J.R. Electroencephalography. Basic principles, clinical applications and related fields. Electroencephalogr. Clin. Neurophysiol. 1982, 54, 473–474. [Google Scholar] [CrossRef]
- Klimesch, W. Memory processes, brain oscillations and EEG synchronization. Int. J. Psychophysiol. 1996, 24, 61–100. [Google Scholar] [CrossRef]
- O’Keefe, J.; Burgess, N. Theta activity, virtual navigation and the human hippocampus. Trends Cogn. Sci. 1999, 3, 403–406. [Google Scholar] [CrossRef]
- Yılmaz, B.; Korkmaz, S.; Arslan, D.B.; Güngör, E.; Asyalı, M.H. Like/dislike analysis using EEG: Determination of most discriminative channels and frequencies. Comput. Methods Programs Biomed. 2014, 113, 705–713. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Y.; Bressler, S.; Ding, M. Response preparation and inhibition: The role of the cortical sensorimotor beta rhythm. Neuroscience 2008, 156, 238–246. [Google Scholar] [CrossRef]
- Alcaide, R.; Agarwal, N.; Candassamy, J.; Cavanagh, S.; Lim, M.; Meschede-Krasa, B.; McIntyre, J.; Ruiz-Blondet, M.V.; Siebert, B.; Stanley, D.; et al. EEG-Based Focus Estimation Using Neurable’s Enten Headphones and Analytics Platform. bioRxiv 2021. [Google Scholar]
- Hurst, J.W. Naming of the Waves in the ECG, With a Brief Account of Their Genesis. Circulation 1998, 98, 1937–1942. [Google Scholar] [CrossRef]
- Ali, M.; Machot, F.; Mosa, A.; Jdeed, M.; Machot, E.; Kyamakya, K. A Globally Generalized Emotion Recognition System Involving Different Physiological Signals. Sensors 2018, 18, 1905. [Google Scholar] [CrossRef]
- Choi, K.H.; Kim, J.; Kwon, O.S.; Kim, M.J.; Ryu, Y.H.; Park, J.E. Is heart rate variability (HRV) an adequate tool for evaluating human emotions?—A focus on the use of the International Affective Picture System (IAPS). Psychiatry Res. 2017, 251, 192–196. [Google Scholar] [CrossRef]
- Lu, G.; Yang, F.; Taylor, J.A.; Stein, J.F. A comparison of photoplethysmography and ECG recording to analyse heart rate variability in healthy subjects. J. Med. Eng. Technol. 2009, 33, 634–641. [Google Scholar] [CrossRef]
- Tobii. Available online: https://www.tobii.com/ (accessed on 27 April 2023).
- Bonifacci, P.; Desideri, L.; Ottaviani, C. Familiarity of Faces: Sense or Feeling? J. Psychophysiol. 2015, 29, 20–25. [Google Scholar] [CrossRef]
- Savur, C.; Sahin, F. American Sign Language Recognition system by using surface EMG signal. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 002872–002877. [Google Scholar] [CrossRef]
- Kulic, D.; Croft, E.A. Affective State Estimation for Human–Robot Interaction. IEEE Trans. Robot. 2007, 23, 991–1000. [Google Scholar] [CrossRef]
- Gouizi, K.; Bereksi Reguig, F.; Maaoui, C. Emotion recognition from physiological signals. J. Med. Eng. Technol. 2011, 35, 300–307. [Google Scholar] [CrossRef]
- Barandas, M.; Folgado, D.; Fernandes, L.; Santos, S.; Abreu, M.; Bota, P.; Liu, H.; Schultz, T.; Gamboa, H. TSFEL: Time Series Feature Extraction Library. SoftwareX 2020, 11, 100456. [Google Scholar] [CrossRef]
- Christ, M.; Braun, N.; Neuffer, J.; Kempa-Liehr, A.W. Time Series FeatuRe Extraction on basis of Scalable Hypothesis tests (tsfresh–A Python package). Neurocomputing 2018, 307, 72–77. [Google Scholar] [CrossRef]
- Makowski, D.; Pham, T.; Lau, Z.J.; Brammer, J.C.; Lespinasse, F.; Pham, H.; Schölzel, C.; Chen, S.H.A. NeuroKit2: A Python toolbox for neurophysiological signal processing. Behav. Res. Methods 2021, 53, 1689–1696. [Google Scholar] [CrossRef] [PubMed]
- Al-Qerem, A.; Kharbat, F.; Nashwan, S.; Ashraf, S.; Blaou, K. General model for best feature extraction of EEG using discrete wavelet transform wavelet family and differential evolution. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720911009. [Google Scholar] [CrossRef]
- Folgado, D.; Barandas, M.; Antunes, M.; Nunes, M.L.; Liu, H.; Hartmann, Y.; Schultz, T.; Gamboa, H. TSSEARCH: Time Series Subsequence Search Library. SoftwareX 2022, 18, 101049. [Google Scholar] [CrossRef]
- Rodrigues, J.; Liu, H.; Folgado, D.; Belo, D.; Schultz, T.; Gamboa, H. Feature-Based Information Retrieval of Multimodal Biosignals with a Self-Similarity Matrix: Focus on Automatic Segmentation. Biosensors 2022, 12, 1182. [Google Scholar] [CrossRef] [PubMed]
- Rani, P.; Sarkar, N.; Liu, C. Maintaining Optimal Challenge in Computer Games through Real-Time Physiological Feedback Mechanical Engineering. In Task-Specific Information Processing in Operational and Virtual Environments: Foundations of Augmented Cognition; Taylor & Francis: Boca Raton, FL, USA, 2006; pp. 184–192. [Google Scholar]
- Villani, V.; Sabattini, L.; Secchi, C.; Fantuzzi, C. A Framework for Affect-Based Natural Human–robot Interaction. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 1038–1044. [Google Scholar] [CrossRef]
- Dobbins, C.; Fairclough, S.; Lisboa, P.; Navarro, F.F.G. A Lifelogging Platform Towards Detecting Negative Emotions in Everyday Life using Wearable Devices. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Athens, Greece, 19–23 March 2018; pp. 306–311. [Google Scholar] [CrossRef]
- Kumar, S.; Savur, C.; Sahin, F. Dynamic Awareness of an Industrial Robotic Arm Using Time-of-Flight Laser-Ranging Sensors. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2850–2857. [Google Scholar] [CrossRef]
- Sahin, M.; Savur, C. Evaluation of Human Perceived Safety during HRC Task using Multiple Data Collection Methods. In Proceedings of the 2022 17th Annual Conference System of Systems Engineering, SoSE 2022, Rochester, NY, USA, 7–11 June 2022; pp. 465–470. [Google Scholar]
- Kumar, S.; Sahin, F. A framework for a real time intelligent and interactive Brain Computer Interface. Comput. Electr. Eng. 2015, 43, 193–214. [Google Scholar] [CrossRef]
- Artal-Sevil, J.S.; Acon, A.; Montanes, J.L.; Dominguez, J.A. Design of a Low-Cost Robotic Arm controlled by Surface EMG Sensors. In Proceedings of the 2018 XIII Technologies Applied to Electronics Teaching Conference (TAEE), Canary Island, Spain, 20–22 June 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Mangukiya, Y.; Purohit, B.; George, K. Electromyography(EMG) sensor controlled assistive orthotic robotic arm for forearm movement. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Shu, L.; Xie, J.; Yang, M.; Li, Z.; Li, Z.; Liao, D.; Xu, X.; Yang, X. A review of emotion recognition using physiological signals. Sensors 2018, 18, 2074. [Google Scholar] [CrossRef]
- Zoghbi, S.; Kulić, D.; Croft, E.; Van Der Loos, M. Evaluation of affective state estimations using an on-line reporting device during human–robot interactions. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, St. Louis, MO, USA, 11–15 October 2009; pp. 3742–3749. [Google Scholar] [CrossRef]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Sandra, G. Hart and Lowell E. Staveland, Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research, Human Mental Workload; North-Holland: Amsterdam, The Netherlands, 1988; pp. 139–183. [Google Scholar] [CrossRef]
- Joosse, M.; Sardar, A.; Lohse, M.; Evers, V. BEHAVE-II: The Revised Set of Measures to Assess Users’ Attitudinal and Behavioral Responses to a Social Robot. Int. J. Soc. Robot. 2013, 5, 379–388. [Google Scholar] [CrossRef]
- Ninomiya, T.; Fujita, A.; Suzuki, D.; Umemuro, H. Development of the Multi-dimensional Robot Attitude Scale: Constructs of People’s Attitudes Towards Domestic Robots. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2015; Volume 9388 LNCS, pp. 482–491. [Google Scholar] [CrossRef]
- Bradley, M.M.; Lang, P.J. Measuring emotion: The self-assessment manikin and the semantic differential. J. Behav. Ther. Exp. Psychiatry 1994, 25, 49–59. [Google Scholar] [CrossRef]
- Nomura, T.; Suzuki, T.; Kanda, T.; Kato, K. Measurement of negative attitudes toward robots. Interact. Stud. Studies. Soc. Behav. Commun. Biol. Artif. Syst. 2006, 7, 437–454. [Google Scholar] [CrossRef]
- Carpinella, C.M.; Wyman, A.B.; Perez, M.A.; Stroessner, S.J. The Robotic Social Attributes Scale (RoSAS). In Proceedings of the 2017 ACM/IEEE International Conference on Human–robot Interaction, Vienna, Austria, 6–9 March 2017; ACM: New York, NY, USA, 2017; Volume Part F1271, pp. 254–262. [Google Scholar] [CrossRef]
- Spielberger, C.D. State-Trait Anger Expression Inventory–2. Available online: https://www.parinc.com/Products/Pkey/429 (accessed on 27 April 2023).
- Kulic, D.; Croft, E.A. Real-time safety for human–robot interaction. In Proceedings of the ICAR ’05, Proceedings, 12th International Conference on Advanced Robotics, Seattle, WA, USA, 18–20 July 2005; Volume 2005, pp. 719–724. [Google Scholar] [CrossRef]
- Landi, C.T.; Villani, V.; Ferraguti, F.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Relieving operators’ workload: Towards affective robotics in industrial scenarios. Mechatronics 2018, 54, 144–154. [Google Scholar] [CrossRef]
- Rani, P.; Sarkar, N.; Smith, C. Affect-sensitive human–robot cooperation–theory and experiments. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; pp. 2382–2387. [Google Scholar] [CrossRef]
- Liu, C.; Rani, P.; Sarkar, N. Human–robot interaction using affective cues. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 285–290. [Google Scholar] [CrossRef]
- Hu, W.L.; Akash, K.; Jain, N.; Reid, T. Real-Time Sensing of Trust in Human-Machine Interactions. IFAC-PapersOnLine 2016, 49, 48–53. [Google Scholar] [CrossRef]
- Rani, P.; Sarkar, N.; Adams, J. Anxiety-based affective communication for implicit human–machine interaction. Adv. Eng. Inform. 2007, 21, 323–334. [Google Scholar] [CrossRef]
- Erebak, S.; Turgut, T. Caregivers’ attitudes toward potential robot coworkers in elder care. Cogn. Technol. Work 2019, 21, 327–336. [Google Scholar] [CrossRef]
- Butler, J.T.; Agah, A. Psychological effects of behavior patterns of a mobile personal robot. Auton. Robot. 2001, 10, 185–202. [Google Scholar] [CrossRef]
- Abdur-Rahim, J.; Morales, Y.; Gupta, P.; Umata, I.; Watanabe, A.; Even, J.; Suyama, T.; Ishii, S. Multi-sensor based state prediction for personal mobility vehicles. PLoS ONE 2016, 11, e0162593. [Google Scholar] [CrossRef]
- Dobbins, C.; Fairclough, S. Detecting and Visualizing Context and Stress via a Fuzzy Rule-Based System during Commuter Driving. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops, PerCom Workshops 2019, Kyoto, Japan, 11–15 March 2019; pp. 499–504. [Google Scholar] [CrossRef]
- Ferrez, P.W.; Milĺan, J.D.R. You are wrong!–Automatic detection of interaction errors from brain waves. In Proceedings of the IJCAI International Joint Conference on Artificial Intelligence, Edinburgh, UK, 30 July–5 August 2005; pp. 1413–1418. [Google Scholar]
- Ehrlich, S.K.; Cheng, G. Human-agent co-adaptation using error-related potentials. J. Neural Eng. 2018, 15, 066014. [Google Scholar] [CrossRef]
- Val-Calvo, M.; Álvarez-Sánchez, J.R.; Ferrández-Vicente, J.M.; Díaz-Morcillo, A.; Fernández-Jover, E. Real-Time Multi-Modal Estimation of Dynamically Evoked Emotions Using EEG, Heart Rate and Galvanic Skin Response. Int. J. Neural Syst. 2020, 30, 2050013. [Google Scholar] [CrossRef]
- Mower, E.; Feil-Seifer, D.J.; Matarić, M.J.; Narayanan, S. Investigating implicit cues for user state estimation in human–robot interaction using physiological measurements. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Jeju, Republic of Korea, 26–29 August 2007; pp. 1125–1130. [Google Scholar] [CrossRef]
- Novak, D.; Beyeler, B.; Omlin, X.; Riener, R. Workload estimation in physical human–robot interaction using physiological measurements. Interact. Comput. 2015, 27, 616–629. [Google Scholar] [CrossRef]
- Iturrate, I.; Chavarriaga, R.; Montesano, L.; Minguez, J.; Millán, J.D.R. Teaching brain-machine interfaces as an alternative paradigm to neuroprosthetics control. Sci. Rep. 2015, 5, 1–11. [Google Scholar] [CrossRef]
- Ehrlich, S.K.; Cheng, G. A Feasibility Study for Validating Robot Actions Using EEG-Based Error-Related Potentials. Int. J. Soc. Robot. 2019, 11, 271–283. [Google Scholar] [CrossRef]
- Salazar-Gomez, A.F.; Delpreto, J.; Gil, S.; Guenther, F.H.; Rus, D. Correcting robot mistakes in real time using EEG signals. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 6570–6577. [Google Scholar] [CrossRef]
- Dehais, F.; Sisbot, E.A.; Alami, R.; Causse, M. Physiological and subjective evaluation of a human–robot object hand-over task. Appl. Ergon. 2011, 42, 785–791. [Google Scholar] [CrossRef] [PubMed]
- Savur, C. A Physiological Computing System to Improve Human-Robot Collaboration by Using Human Comfort Index. Ph.D. Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2022. [Google Scholar]
- Nokata, M.; Ikuta, K.; Ishii, H. Safety-optimizing method of human-care robot design and control. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 1991–1996. [Google Scholar] [CrossRef]
- Kulic, D.; Croft, E. Estimating Robot Induced Affective State using Hidden Markov Models. In Proceedings of the ROMAN 2006–The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 257–262. [Google Scholar] [CrossRef]
- Hall, E.T. Proxemics and Design. Des. Environ. 1971, 2, 24–25. [Google Scholar]
- Rani, P.; Liu, C.; Sarkar, N.; Vanman, E. An empirical study of machine learning techniques for affect recognition in human–robot interaction. Pattern Anal. Appl. 2006, 9, 58–69. [Google Scholar] [CrossRef]
- Too, J.; Tan, C.; Duan, F.; Zhang, Y.; Watanabe, K.; Kato, R.; Arai, T. Human–robot Collaboration in Cellular Manufacturing: Design and Development. In Proceedings of the International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 29–34. [Google Scholar] [CrossRef]
- Arai, T.; Kato, R.; Fujita, M. Assessment of operator stress induced by robot collaboration in assembly. CIRP Ann.–Manuf. Technol. 2010, 59, 5–8. [Google Scholar] [CrossRef]
- Schirner, G.; Erdogmus, D.; Chowdhury, K.; Padir, T. The future of human-in-the-loop cyber-physical systems. Computer 2013, 46, 36–45. [Google Scholar] [CrossRef]
- Rani, P.; Sarkar, N. Emotion-sensitive robots—A new paradigm for human–robot interaction. In Proceedings of the 4th IEEE/RAS International Conference on Humanoid Robots, Santa Monica, CA, USA, 10–12 November 2004; Volume 1, pp. 149–167. [Google Scholar] [CrossRef]
- Liu, H.; Gamboa, H.; Schultz, T. Sensor-Based Human Activity and Behavior Research: Where Advanced Sensing and Recognition Technologies Meet. Sensors 2022, 23, 125. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Signal Type | Feature | Description |
|---|---|---|
| ECG | MeanNN | The mean of the RR intervals. |
| SDNN | The standard deviation of the RR intervals. | |
| RMSSD | The square root of the mean of the sum of successive differences between adjacent RR intervals. | |
| SDSD | The standard deviation of the successive differences between RR intervals. | |
| pNN50 | The proportion of RR intervals greater than 50 ms, out of the total number of RR intervals. | |
| pNN20 | The proportion of RR intervals greater than 20 ms, out of the total number of RR intervals. | |
| LF | The spectral power of low frequencies. | |
| HF | The spectral power of high frequencies. | |
| GSR | Amp. Mean | Mean value of peak amplitude |
| Amp. Std | Standard deviation of peak amplitude | |
| Phasic Mean | Mean value of phasic signal | |
| Phasic Std | Standard deviation of phasic signal | |
| Tonic Mean | Mean value of tonic signal | |
| Tonic Std | Standard deviation of tonic signal | |
| Onset Rate | Number of onsets per minute | |
| Pupillometry | Pupil Mean | Mean value of pupil signal |
| Pupil Std | Standard deviation of pupil signal | |
| EEG | MAV | Mean absolute value |
| ZC | Zero crossing | |
| SSC | Slope sign changes | |
| SKE | Skewness of EEG signal | |
| Kurtosis | Kurtosis of EEG signal | |
| Entropy | Entropy of EEG signal | |
| SEntropy | Spectral entropy of EEG signal |
| Reference | Bio-Signals | Sample Size | Stimuli | Data Col. Type | Label Type | Algorithm | Target |
|---|---|---|---|---|---|---|---|
| Kulic et al. [7] | SC, HR, EMG | 36 | Robot trajectory | After trial | Subjective (custom) | Fuzzy inference | Arousal, valence |
| Kulic et al. [52] | SC, HR, EMG | 36 | Robot trajectory | After trial | Subjective (custom) | HMM | Arousal, valence |
| Nomura et al. [49] | None | 240 | Interaction with robot | After trial | NARS | Statistical analysis | Negative attitude |
| Villania et al. [35] | Control Robot arm | 21 | Interaction with robot | Baseline | Subjective (custom) | Thresholding | Stress |
| Landi et al. [53] | HRV (Smartwatch) | 21 | Teleoperation | Baseline | Subjective (custom) | Thresholding | Stress |
| Rani et al. [54] | ECG, EDA, EMG | NA | Control mobile robot | Baseline | Subjective (custom) | Fuzzy inference | Affective state |
| Lui et al. [55] | ECG, EDA, EMG | 14 | Control robot arm | Baseline | Subjective (custom) | Regression tree model | Affective cues |
| Rani et al. [34] | ECG, EDA, EMG | 15 | Game | Baseline | Subjective (custom) | KNN, Bayesian | Compare learning, algorithm |
| Hu et al. [56] | EEG, GSR | 31 | Car simulation | Baseline | Subjective (custom) | LDA, LinearSVM, LR, QDA, KNN | Measuring trust |
| Rani et al. [57] | ECG, ICG, PPG, Heart Sound, GSR, and EMG | 15 | Game | Baseline | NASA TLX | Regression tree | Affective state |
| Erebak et al. [58] | None | 102 | Robot’s appearance | After trial | Subjective (custom) | Statistical analysis | Anthropomorphism of robot |
| Butler et al. [59] | None | 40 | Mobile robot behavior | After trial | Subjective (custom) | Statistical analysis | Psychological aspect |
| Rahim et al. [60] | EEG, IBI, GSR | 15 | Wheelchair | Baseline | STAI | ANOVA, LDA, SVM, and SLR | Stress estimation |
| Dobbins et al. [61] | ECG, PPG | 21 | Commute (car) | Before/after trial | STAXI-2, UMACL | LDA, DT, and kNN | Negative emotion |
| Ferrez et al. [62] | EEG | 3 | HRI | After trial | Subjective (custom) | Gaussian classifiers | Error-related potential |
| Ehrlich et al. [63] | EEG | 6 | HRI | After trial | Subjective (custom) | SVM | Error-related potential |
| Val-Calvo et al. [64] | EEG, GSR, PPG | 18 | Visual | After trial | Subjective (custom) | Ada-Boost, Bayesian, and QDA | Arousal, valence |
| Mower et al. [65] | GSR | 26 | HRI | - | - | KNN | User state estimation |
| Novak et al. [66] | ECG, GSR, RPS, Skin Temp., EEG, and Eye tracking | 10 | HRI | After trial | NASA TLX | RF | Workload |
| Iturrate et al. [67] | EEG | 12 | HRI | After trial | NASA TLX | Reinforcement learning | Error signal |
| Ehrlich et al. [68] | EEG | 13 | HRI | - | Action (key press) | LDA | Error signal |
| Salazar-Gomez et al. [69] | EEG | 12 | HRI | After trial | Subjective (custom) | LDA | Error signal |
| Dehais et al. [70] | GSR, Pupil, Gaze | 12 | HRI (hand-over task) | After trial | Subjective (custom) | Statistical analysis | Metrics |
| Sahin et al. [38] | GSR, Pupil, ECG | 20 | HRI | During and After Trial | Subjective (custom) | Statistical analysis | Perceived safety |
| Savur et al. [71] | GSR, Pupil, ECG | 36 | HRI | During and After Trial | Subjective (custom) | Circumplex model | Comfort index |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savur, C.; Sahin, F. Survey on Physiological Computing in Human–Robot Collaboration. Machines 2023, 11, 536. https://doi.org/10.3390/machines11050536
Savur C, Sahin F. Survey on Physiological Computing in Human–Robot Collaboration. Machines. 2023; 11(5):536. https://doi.org/10.3390/machines11050536
Chicago/Turabian StyleSavur, Celal, and Ferat Sahin. 2023. "Survey on Physiological Computing in Human–Robot Collaboration" Machines 11, no. 5: 536. https://doi.org/10.3390/machines11050536
APA StyleSavur, C., & Sahin, F. (2023). Survey on Physiological Computing in Human–Robot Collaboration. Machines, 11(5), 536. https://doi.org/10.3390/machines11050536