
Study on Sinusoidal Post-Buckling Deformation of Coiled Tubing in Horizontal Wells Based on the Separation Constant Method


Abstract
:1. Introduction
2. Theoretical Model
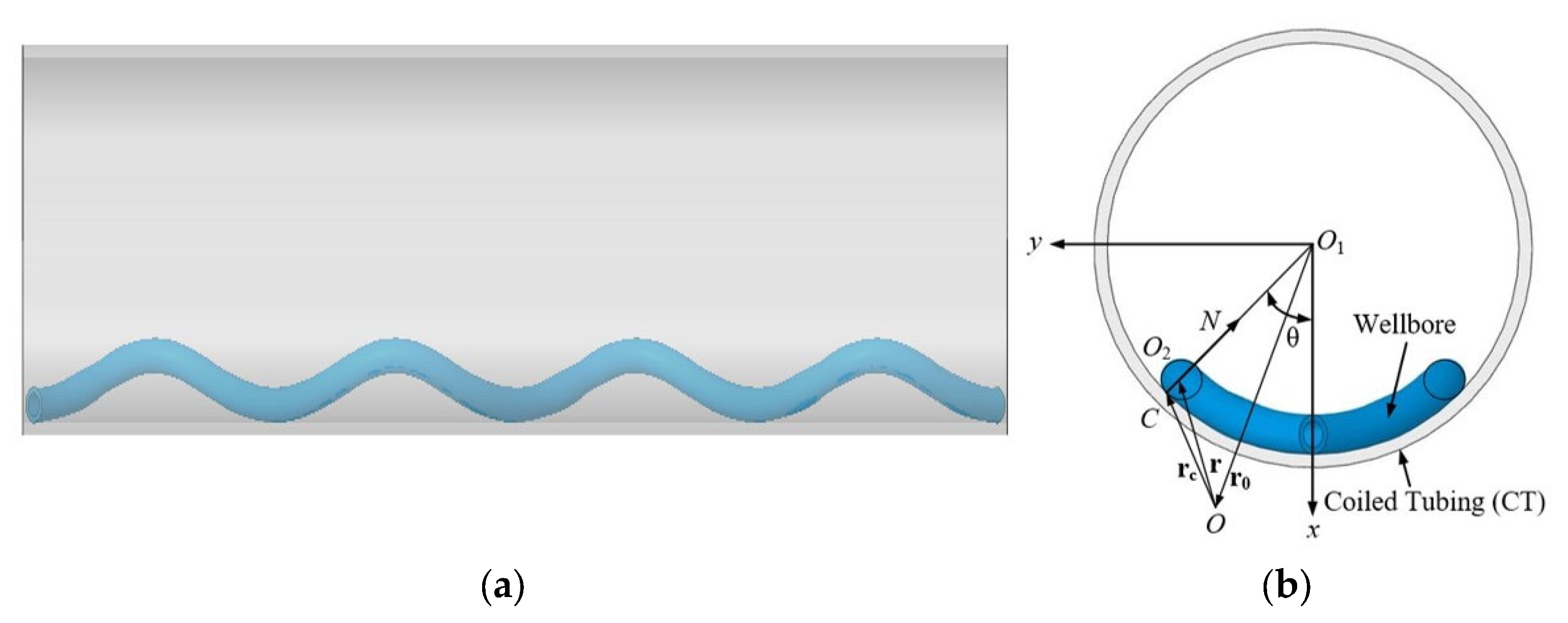
2.1. Coiled Tubing Buckling Equation
- (1)
- The length along its axis remains invariable when the CT is deformed.
- (2)
- The influence of fluids, such as downhole mud, on the mechanics of CT is neglected.
- (3)
- The wellbore and CT are circular in cross-section.
- (4)
- There is deformation of CT in the horizontal well sections at continuous contact.
- (5)
- The clearance between the CT and the wellbore is much smaller than the CT length.
- (6)
- The effects of the CT rotation and torsion are neglected.
- (7)
- The initial shape of the CT before deformation occurs is straight.
- (8)
- The CT is connected with two pin ends.
2.2. Equation Dimensionless
3. Results and Discussion
3.1. Conditional Analysis of Solutions
3.2. Separation Constant Value Range
3.3. Calculation of Half-Wave Number and Contact Force
4. Conclusions
- (1)
- The critical load for sinusoidal buckling of the CT with a dimensionless length less than is higher than Dawson’s model, when friction is ignored and the initial linear configuration is maintained. If the CT is long enough, the resulting half-wave number decreases as compression progresses during sinusoidal post-buckling. However, the sinusoidal half-wave number produced during the compression of shorter strings does not change at all.
- (2)
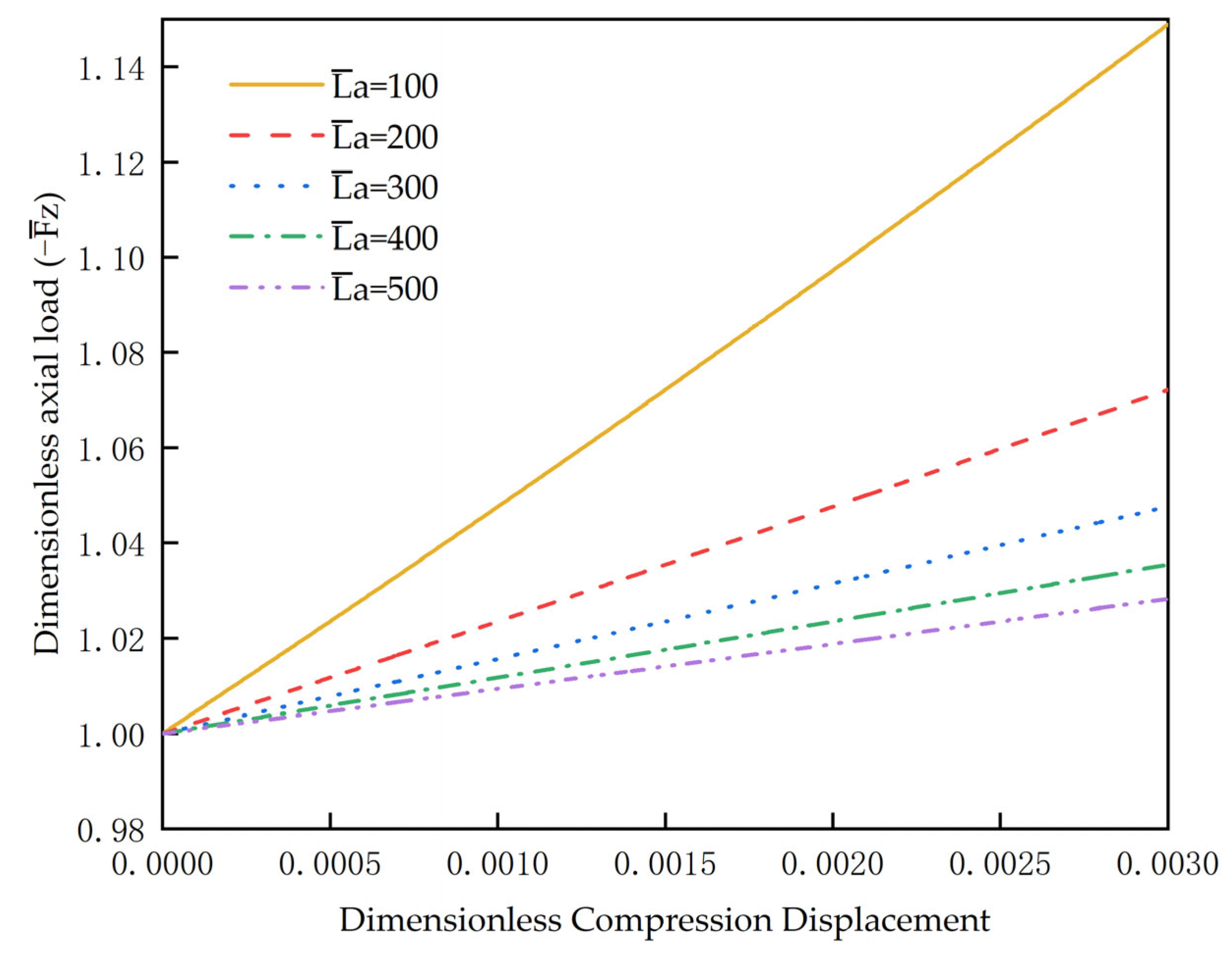
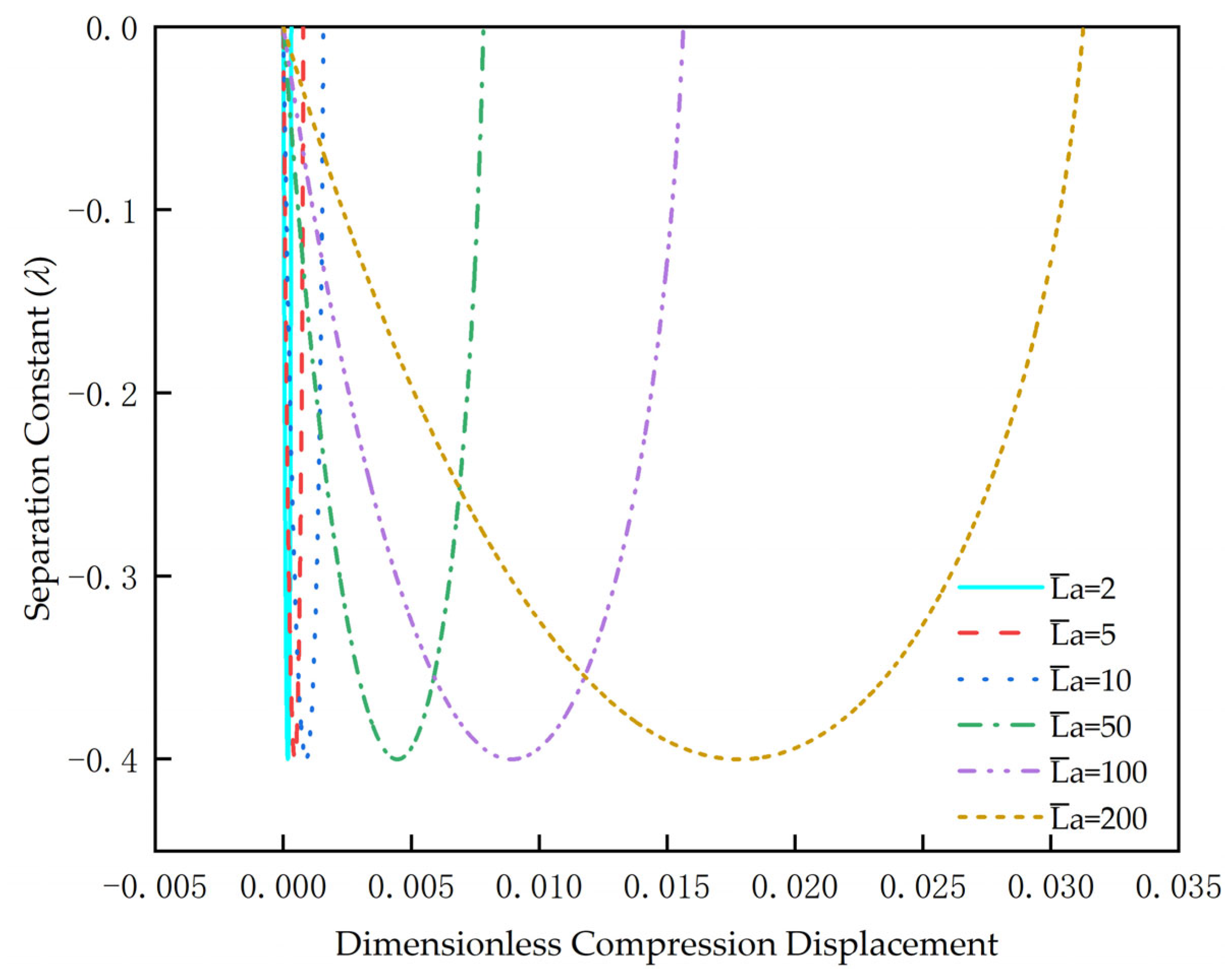
- The range of the separation constant for CT under axial compression is , and sinusoidal buckling deformation is stable. As the compression continues, the critical value of stable deformation and unstable deformation is reached. At this point, the separation constant is equal to zero, the critical value is subjected to a dimensionless axial load value of approximately 1.876, and the string enters a mixed sinusoidal and helical buckling mode. This conclusion is basically consistent with 1.875 of Miska. The introduction of the separation constant method lays a foundation for the further study of the change process from sinusoidal buckling to spiral buckling.
- (3)
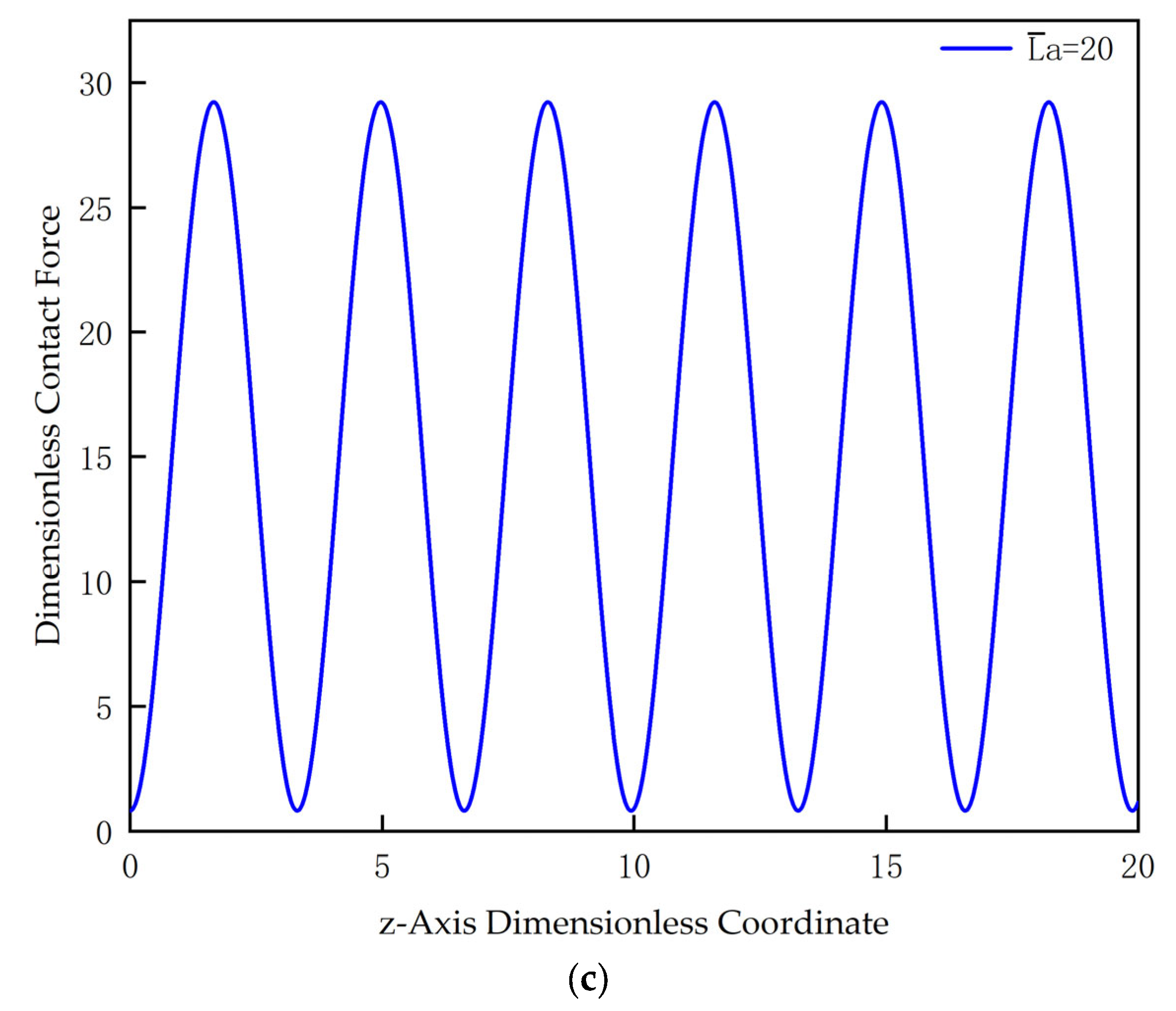
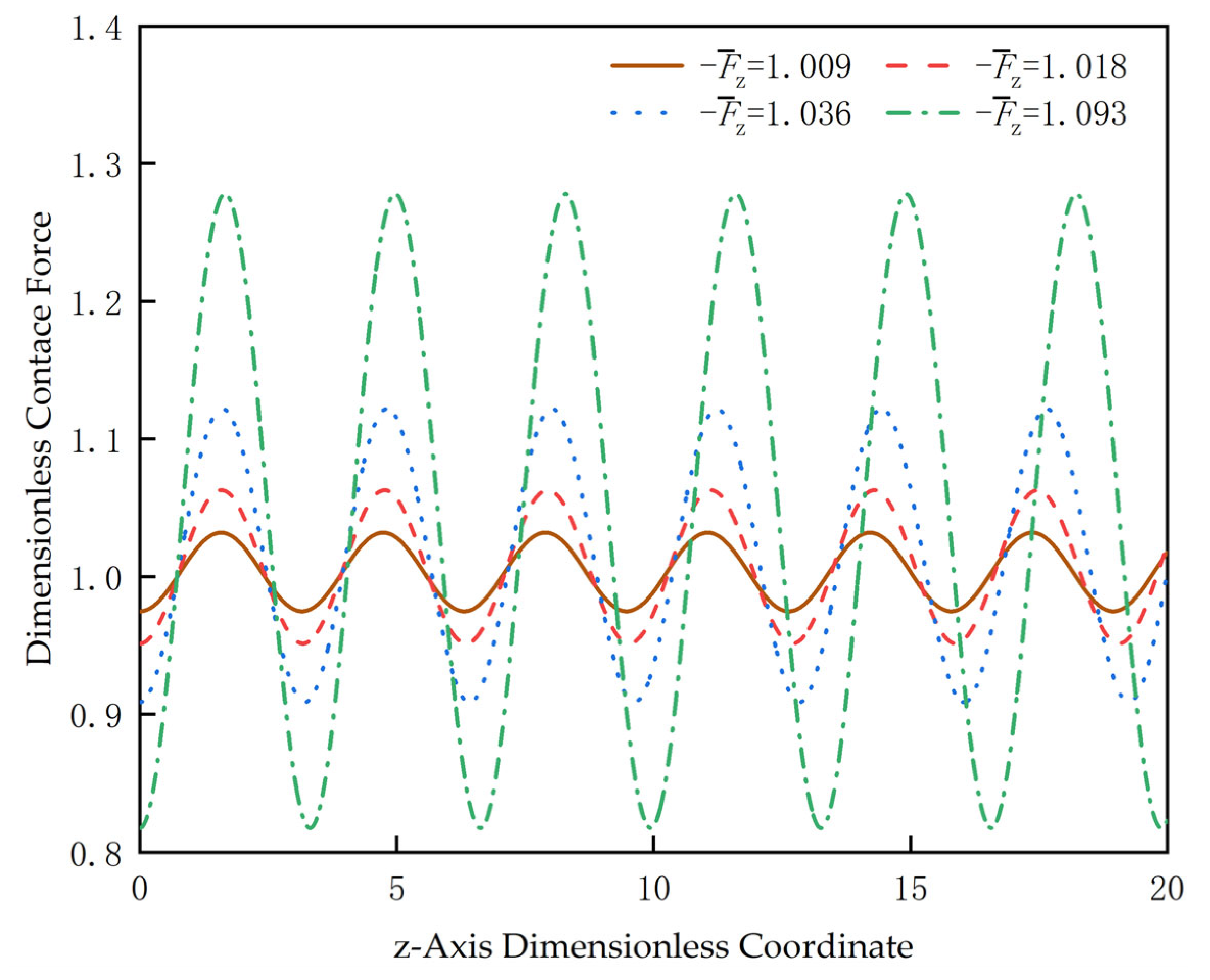
- Based on the mathematical model of buckling, the contact force, including the dynamic term between the coiled tubing and the wellbore after sinusoidal buckling, is established. The change of the contact force on the wellbore wall when the coiled tubing moving at different speeds occurs sinusoidal buckling is numerically calculated. The results show that the greater the velocity, the greater the force on the wellbore. However, the force exerted on the wellbore by the string at the bottom of the horizontal well is basically unaffected by the velocity. It shows that the force generated by coiled tubing on the wellbore wall during the wellbore movement is greater than the theoretical calculation value of static string.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mitchell, R.F. New buckling solutions for extended reach wells. In Proceedings of the IADC/SPE Drilling Conference, Dallas, TX, USA, 26 February 2002. [Google Scholar]
- Mulcahy, C.G.; Su, T.X.; Wicks, N.; Reis, P.M. Extending the reach of a rod injected into a cylinder through axial rotation. J. Appl. Mech.-Trans. ASME 2016, 83, 051003. [Google Scholar] [CrossRef]
- Miller, J.T.; Su, T.; Dussan, E.B.; Pabon, J.; Wicks, N.; Bertoldi, K.; Reis, P.M. Buckling-induced lock-up of a slender rod injected into a horizontal cylinder. Int. J. Solids Struct. 2015, 72, 153–164. [Google Scholar] [CrossRef]
- Zhang, J.T.; Yin, G.F.; Li, Y.F.; Zhang, L. Buckling configurations of tubular strings constrained in three-dimensional curved wellbores. J. Pet. Sci. Eng. 2021, 195, 107953. [Google Scholar] [CrossRef]
- Mitchell, R.F. Buckling behavior of well tubing: The packer effect. Soc. Pet. Eng. J. 1982, 22, 616–624. [Google Scholar] [CrossRef]
- Paslay, P.R.; Bogy, D.B. The stability of circular rod laterally constrained to be in contact with an inclined circular cylinder. J. Appl. Mech.-Trans. ASME 1964, 31, 605–610. [Google Scholar] [CrossRef]
- Dawson, R. Drilling pipe Bucking in Inclined Holes. J. Pet. Technol. 1984, 36, 1734–1738. [Google Scholar] [CrossRef]
- Gao, D.L.; Huang, W.J. A review of down-hole tubular string buckling in well engineering. Pet. Sci. 2015, 12, 443–457. [Google Scholar] [CrossRef]
- Hajianmaleki, M.; Daily, J.S. Advances in critical buckling load assessment for tubulars inside wellbores. J. Pet. Sci. Eng. 2014, 116, 136–144. [Google Scholar] [CrossRef]
- Yu, Y.P.; Chen, L.H.; Sun, W.P.; Zeng, B.H.; Sun, Y.H. An analytical investigation on large post-buckling behavior of a drilling shaft modeled as a rotating beam with various boundary conditions. Int. J. Mech. Sci. 2018, 148, 486–495. [Google Scholar] [CrossRef]
- Kuang, Y.C.; Lin, W.; Liu, Y.; Wang, Q.; Zhang, J.Z. Numerical modelling and field experimental validation of the axial load transfer on the drill-strings in deviated wells. J. Nat. Gas Sci. Eng. 2020, 75, 103124. [Google Scholar] [CrossRef]
- Chen, Y.C.; Lin, Y.H.; Cheatham, J.B. Tubing and casing buckling in horizontal wells. J. Pet. Technol. 1990, 42, 140–191. [Google Scholar] [CrossRef]
- Khodabakhsh, R.; Saidi, A.R.; Bahaadini, R. An analytical solution for nonlinear vibration and post-buckling of functionally graded pipes conveying fluid considering the rotary inertia and shear deformation effects. Appl. Ocean Res. 2020, 101, 102277. [Google Scholar] [CrossRef]
- Qin, X.; Gao, D.L.; Huang, W.J. Frictional buckling analyses of slender rod constrained in a horizontal cylinder. Eur. J. Mech. A-Solids 2019, 76, 70–79. [Google Scholar] [CrossRef]
- Huang, W.J.; Gao, D.L.; Wei, S.L.; Chen, P.J. Boundary condition: A key factor in tubular-string buckling. SPE J. 2016, 20, 1409–1420. [Google Scholar] [CrossRef]
- Bang, J.; Jegbefume, O.; Ledroz, A.; Weston, J.; Thompson, J. Analysis and Quantification of Wellbore Tortuosity. SPE Prod. Oper. 2017, 32, 118–127. [Google Scholar] [CrossRef]
- Matthews, C.M.; Dunn, L.J. Drilling and production practices to mitigate sucker rod/tubing wear-related failures in directional wells. SPE Prod. Fac. 1993, 8, 251–259. [Google Scholar] [CrossRef]
- Mitchell, R.F. The effect of friction on initial buckling of tubing and flowlines. SPE Drill. Complet. 2007, 22, 112–118. [Google Scholar] [CrossRef]
- He, X.J.; Kyllingstad, A. Helical buckling and lock-up conditions for coiled tubing in curved wells. SPE Drill. Complet. 1995, 10, 10–15. [Google Scholar] [CrossRef]
- Zhu, Z.L.; Hu, G.; Fu, B.W. Buckling behavior and axial load transfer assessment of coiled tubing with initial curvature in constant-curvature wellbores. J. Pet. Sci. Eng. 2021, 195, 107794. [Google Scholar] [CrossRef]
- Gao, G.H.; Miska, S. Effects of boundary conditions and friction on static buckling of pipe in a horizontal well. SPE J. 2009, 14, 782–796. [Google Scholar] [CrossRef]
- Gao, G.H.; Miska, S. Effects of friction on post-buckling behavior and axial load transfer in a horizontal well. SPE J. 2010, 15, 1110–1124. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, J.C.; Cui, W.; Xiao, Z.M.; Yue, Q.B. Post-buckling transition of compressed pipe strings in horizontal wellbores. Ocean Eng. 2020, 197, 106880. [Google Scholar] [CrossRef]
- Gao, D.L. Down-Hole Tubular Mechanics and Its Applications, 1st ed.; China University of Petroleum Press: Dongying, China, 2006; pp. 16–42. [Google Scholar]
- Huang, W.J.; Gao, D.L.; Liu, F.W. Buckling analysis of tubular strings in horizontal wells. SPE J. 2015, 20, 405–416. [Google Scholar] [CrossRef]
- Li, Z.F.; Zhang, C.Y.; Song, G.M. Research advances and debates on tubular mechanics in oil and gas wells. J. Pet. Sci. Eng. 2017, 151, 194–212. [Google Scholar] [CrossRef]
- Mitchell, R.F. New concepts for helical buckling. SPE Drill. Eng. 1988, 3, 303–310. [Google Scholar] [CrossRef]
- Zhang, J.T.; Yin, G.F.; Fan, Y.; Zhang, H.L.; Tian, L.; Qin, S.; Zhu, D.J. The helical buckling and extended reach limit of coiled tubing with initial bending curvature in horizontal wellbores. J. Pet. Sci. Eng. 2021, 200, 108398. [Google Scholar] [CrossRef]
- Liu, J.P.; Zhong, X.Y.; Cheng, Z.B.; Feng, X.Q.; Ren, G.X. Buckling of a slender rod confined in a circular tube: Theory, simulation, and experiment. Int. J. Mech. Sci. 2018, 140, 288–305. [Google Scholar] [CrossRef]
- Miska, S.; Qiu, W.Y.; Volk, L.; Cunha, J.C. An Improved Analysis of Axial Force along Coiled Tubing in Inclined/Horizontal Wellbores; Society of Petroleum Engineers (SPE): Richardson, TX, USA, 1996. [Google Scholar]
- Timoshenko, S.P.; Gere, J.M. Theory of Elastic Stability, 2nd ed.; Dover Publications, Inc.: Mineola, TX, USA, 2009; pp. 87–104. [Google Scholar]
- Qin, X.; Gao, D.L.; Chen, X.Y. Effects of initial curvature on coiled tubing buckling behavior and axial load transfer in a horizontal well. J. Pet. Sci. Eng. 2017, 150, 191–202. [Google Scholar] [CrossRef]
- Cunha, J.C. Buckling of tubulars inside wellbores: A review on recent theoretical and experimental works. SPE Drill. Complet. 2004, 19, 13–19. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Length of CT | Minimum Axial Load | Half Wave Number (n) |
|---|---|---|
| 1 | 4.985 | 1 |
| 2 | 1.436 | 1 |
| 3 | 1.004 | 1 |
| 3.5 | 1.023 | 1 |
| 4 | 1.119 | 1 |
| 5 | 1.106 | 2 |
| 10 | 1.007 | 3 |
| 20 | 1.007 | 6 |
| 50 | 1.0001 | 16 |
| 100 | 1.0001 | 32 |
| 200 | 1.0001 | 64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Chen, L.; Zhong, Y.; Wang, L. Study on Sinusoidal Post-Buckling Deformation of Coiled Tubing in Horizontal Wells Based on the Separation Constant Method. Machines 2023, 11, 563. https://doi.org/10.3390/machines11050563
Li Z, Chen L, Zhong Y, Wang L. Study on Sinusoidal Post-Buckling Deformation of Coiled Tubing in Horizontal Wells Based on the Separation Constant Method. Machines. 2023; 11(5):563. https://doi.org/10.3390/machines11050563
Chicago/Turabian StyleLi, Zhuang, Liangyu Chen, Yan Zhong, and Lei Wang. 2023. "Study on Sinusoidal Post-Buckling Deformation of Coiled Tubing in Horizontal Wells Based on the Separation Constant Method" Machines 11, no. 5: 563. https://doi.org/10.3390/machines11050563
APA StyleLi, Z., Chen, L., Zhong, Y., & Wang, L. (2023). Study on Sinusoidal Post-Buckling Deformation of Coiled Tubing in Horizontal Wells Based on the Separation Constant Method. Machines, 11(5), 563. https://doi.org/10.3390/machines11050563