


Analysis of E-Scooter Vibrations from Health Perspective: A Case Study
 , and
, and
Abstract
:1. Introduction
E-Scooter Trip Duration
2. Materials and Methods
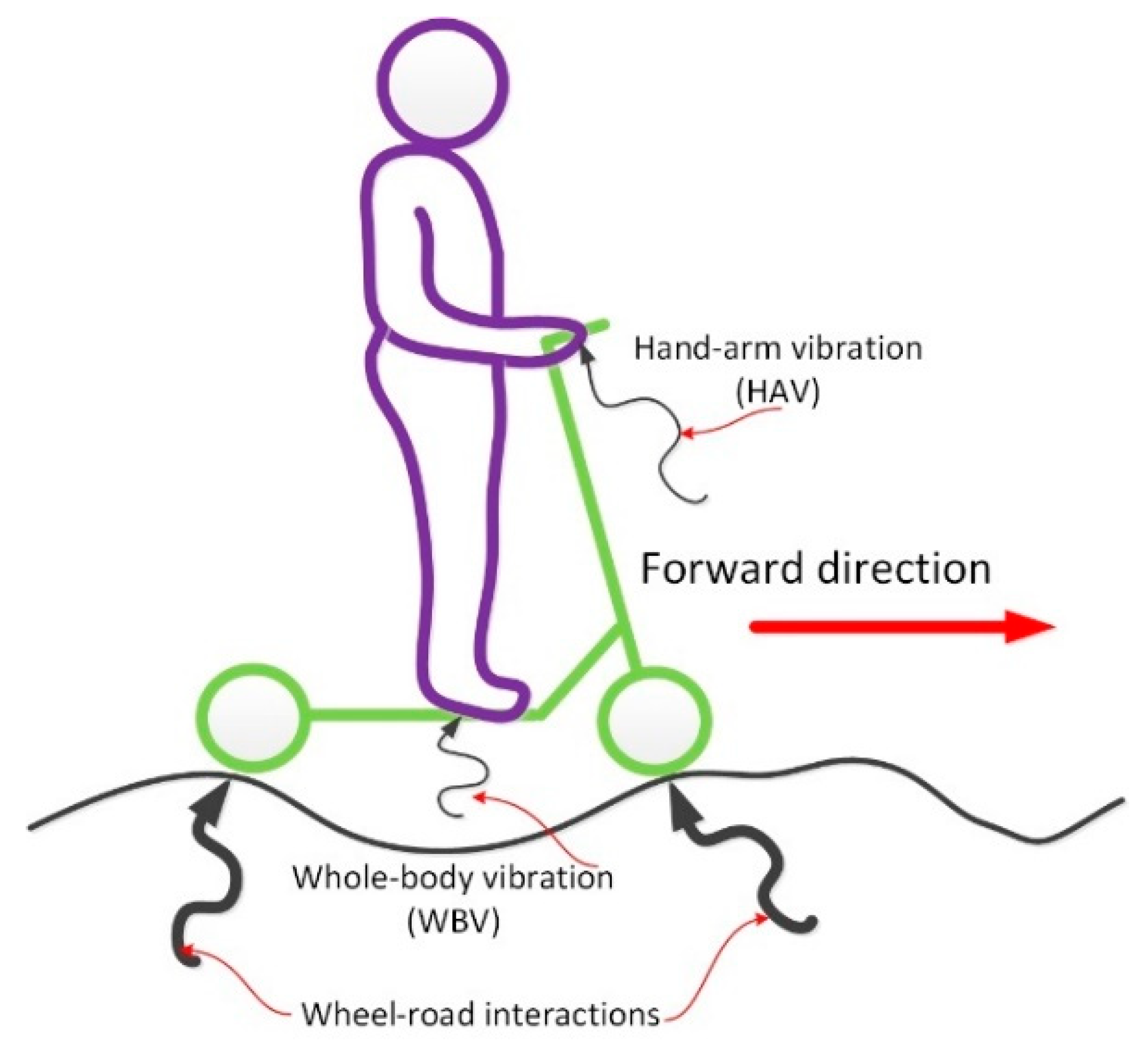
- The WBVs transmitted through the feet are defined according to UNE-2631 [5].
- The HAVs imparted through the hands are defined according to UNE-5349 [4].
- is the weighted acceleration in the time domain (), and
- is the exposure duration (s).
- Raw time-domain acceleration data were collected from real measurements.
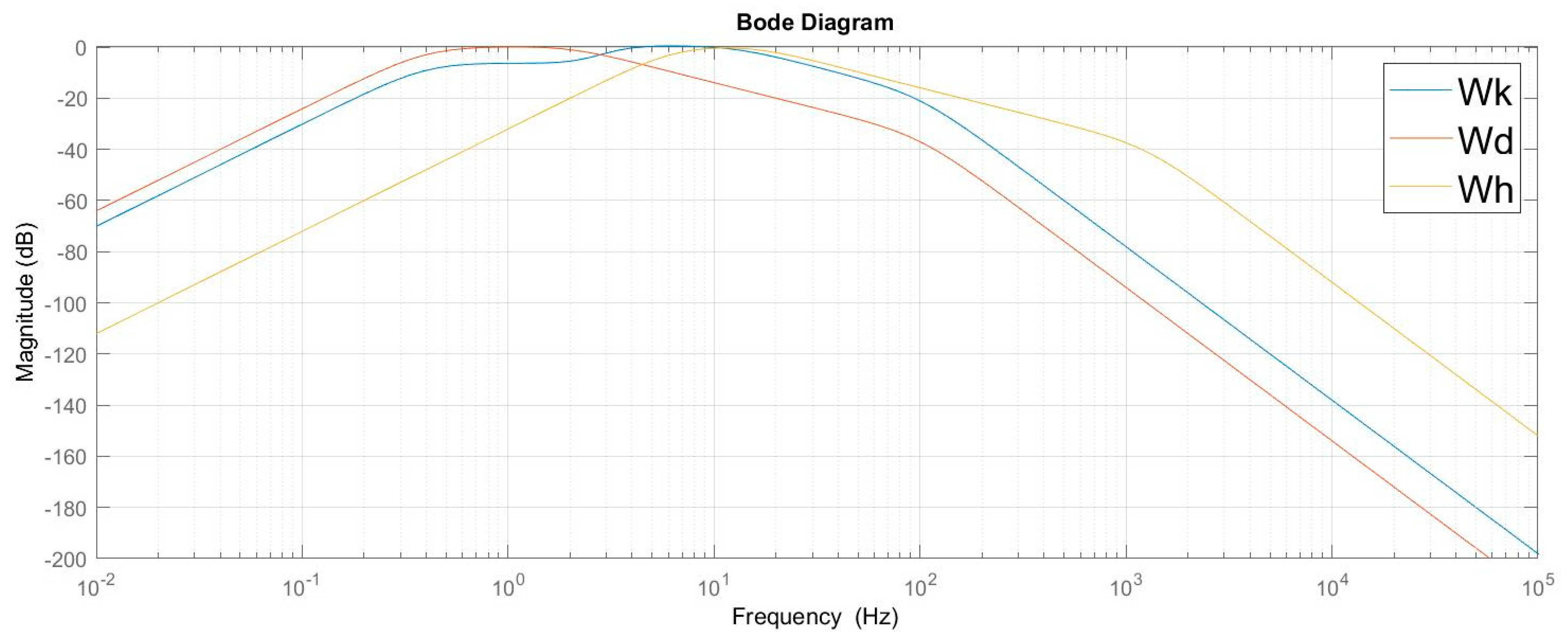
- Equation (1) was used to obtain frequency-weighted acceleration values for each direction for both WBV and HAV.
- Equations (2) and (3) were used to weight the acceleration values in three directions for WBV and HAV, respectively.
2.1. Design of Experiment (DoE)
- Two drivers;
- Two types of pavements, square pavers of 12 cm and asphalt with slight defects (Figure 3);
- Two speed modes: ECO and MAX.
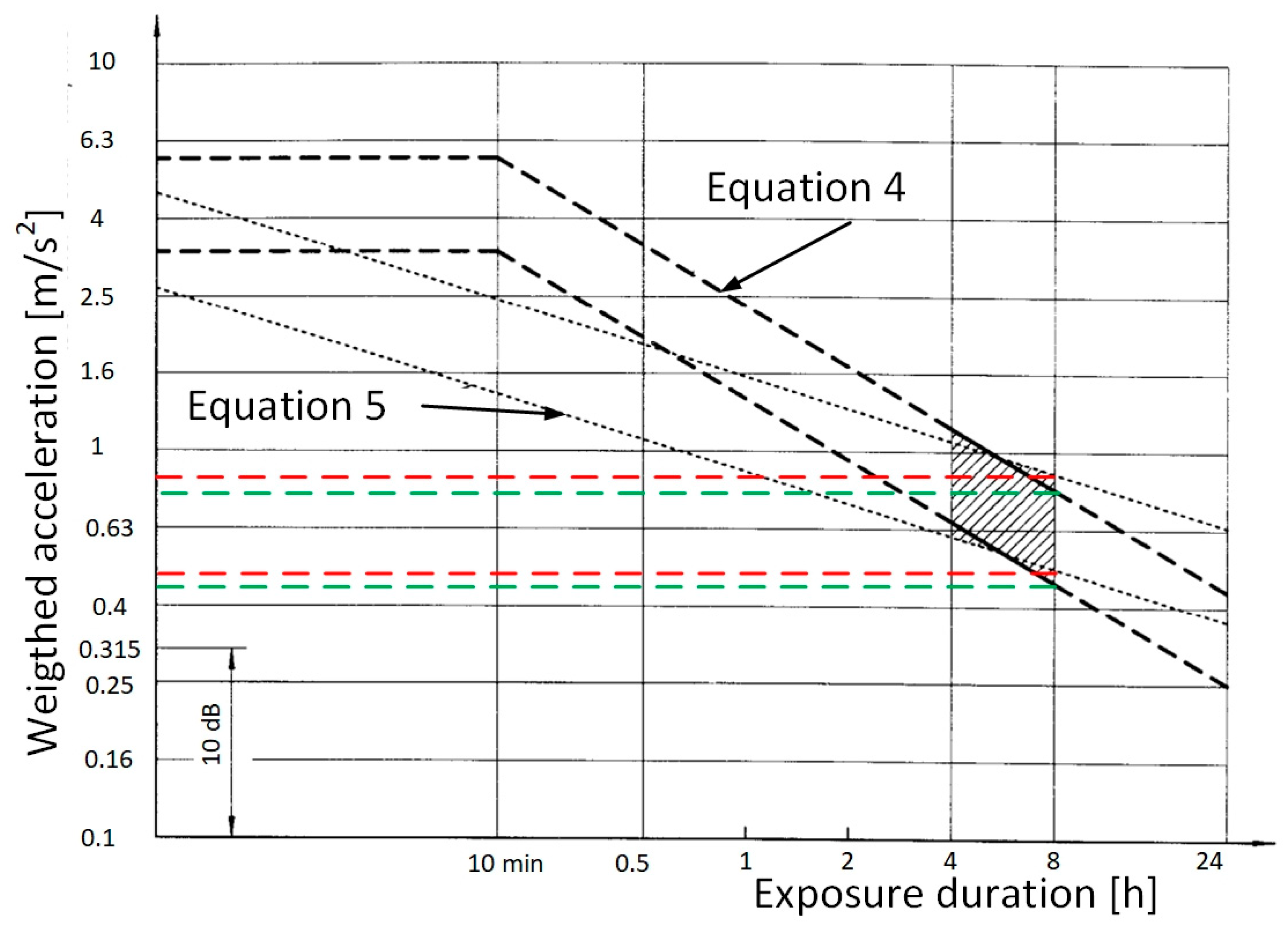
2.2. Vibration Thresholds for Health
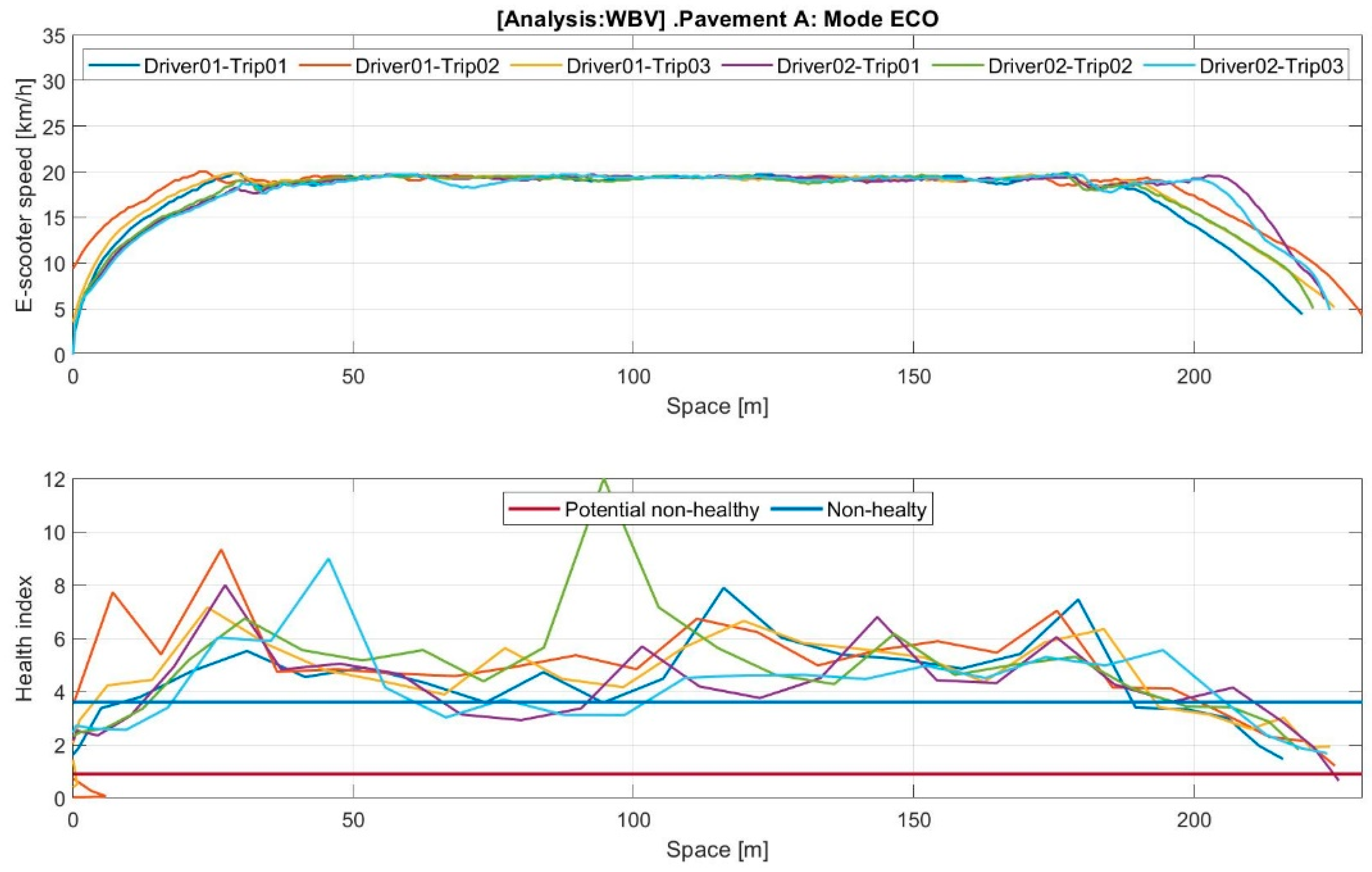
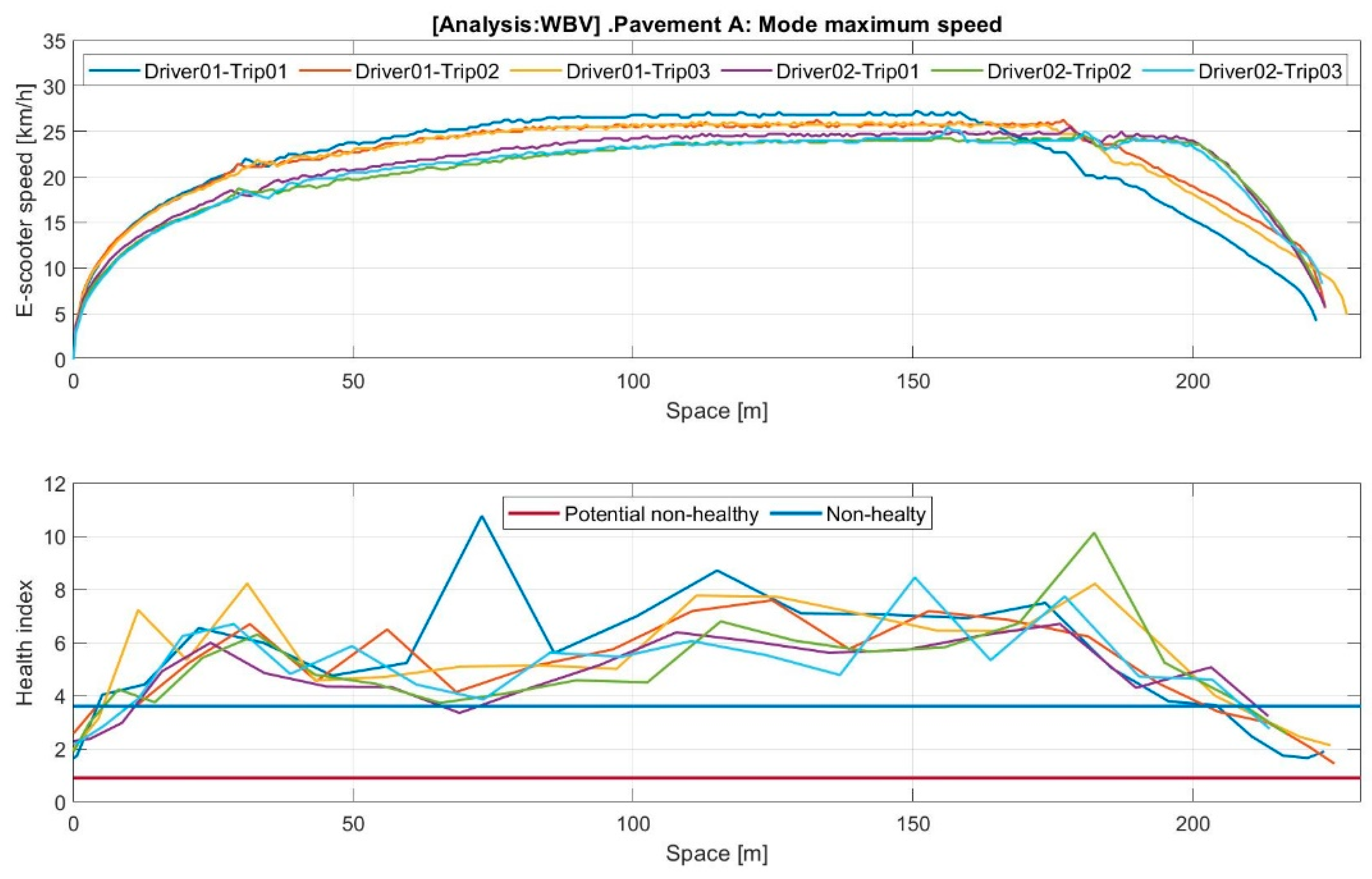
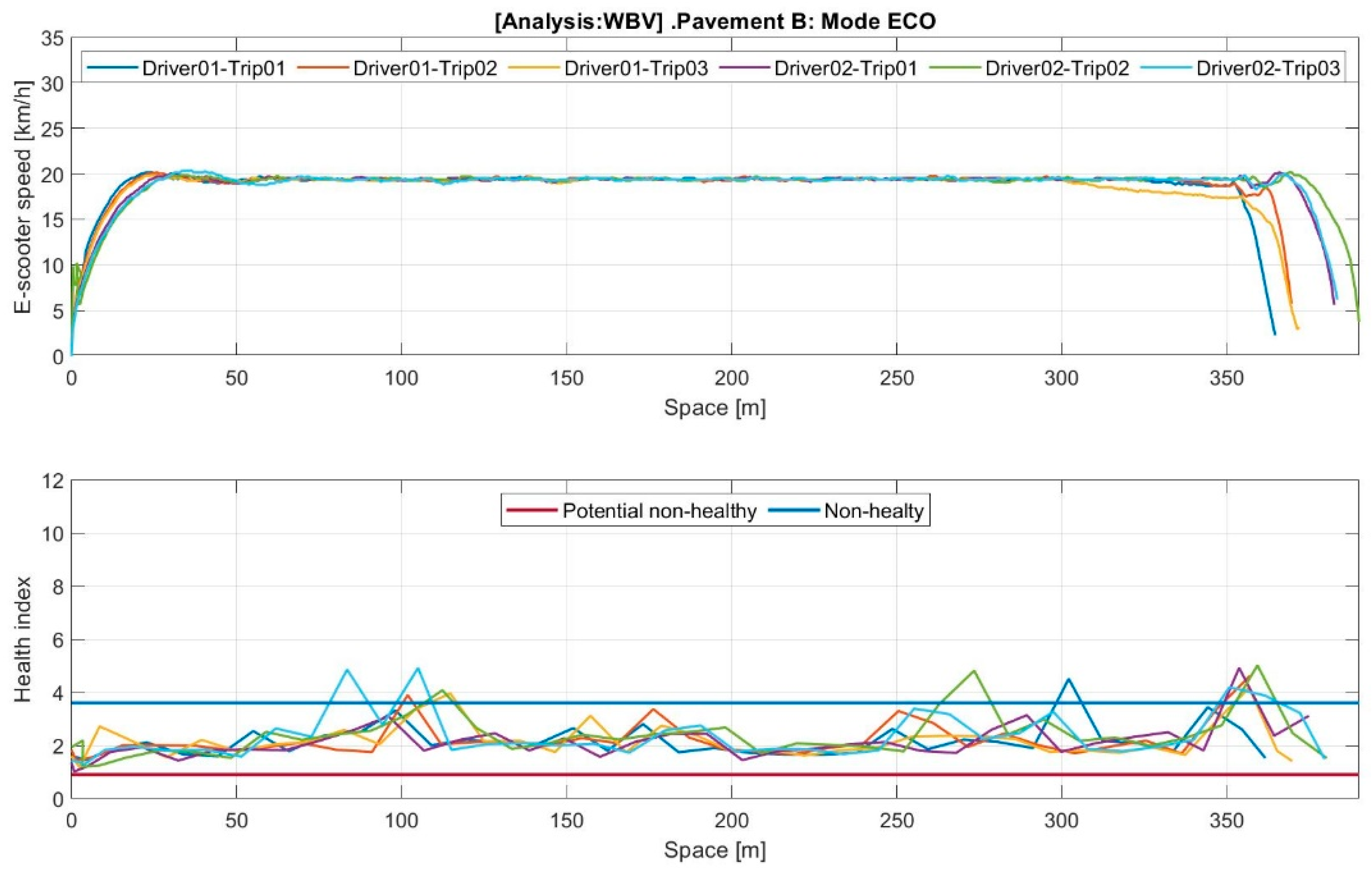
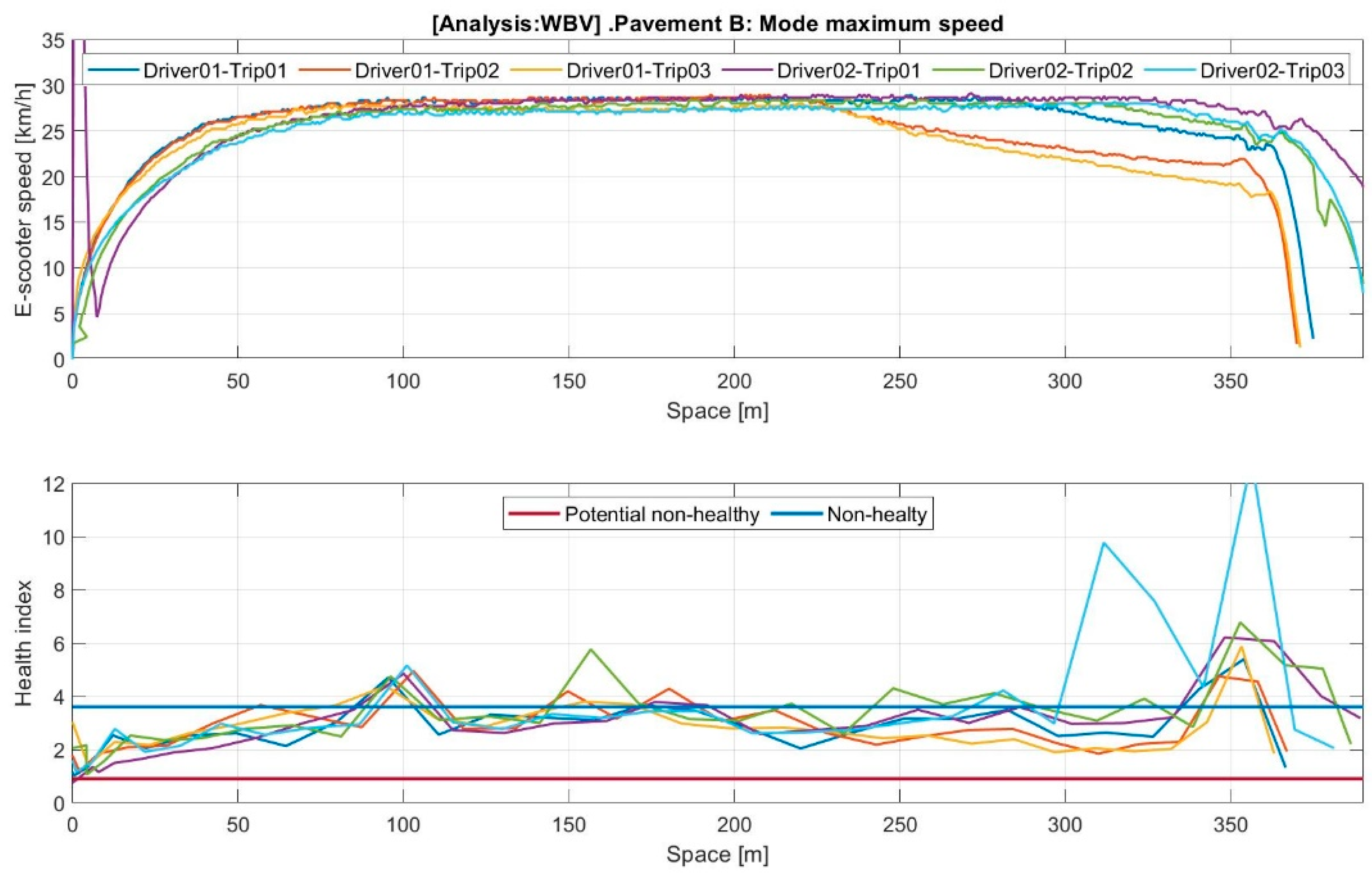
- Acceleration and WBV in the range 0.9–3.6 m/s2 were considered as ‘potentially non-healthy’ WBVs (pn-h zone); when the acceleration exceeded 3.6 m/s2, the WBVs were considered to be in the ‘non-healthy’ (n-h) zone.
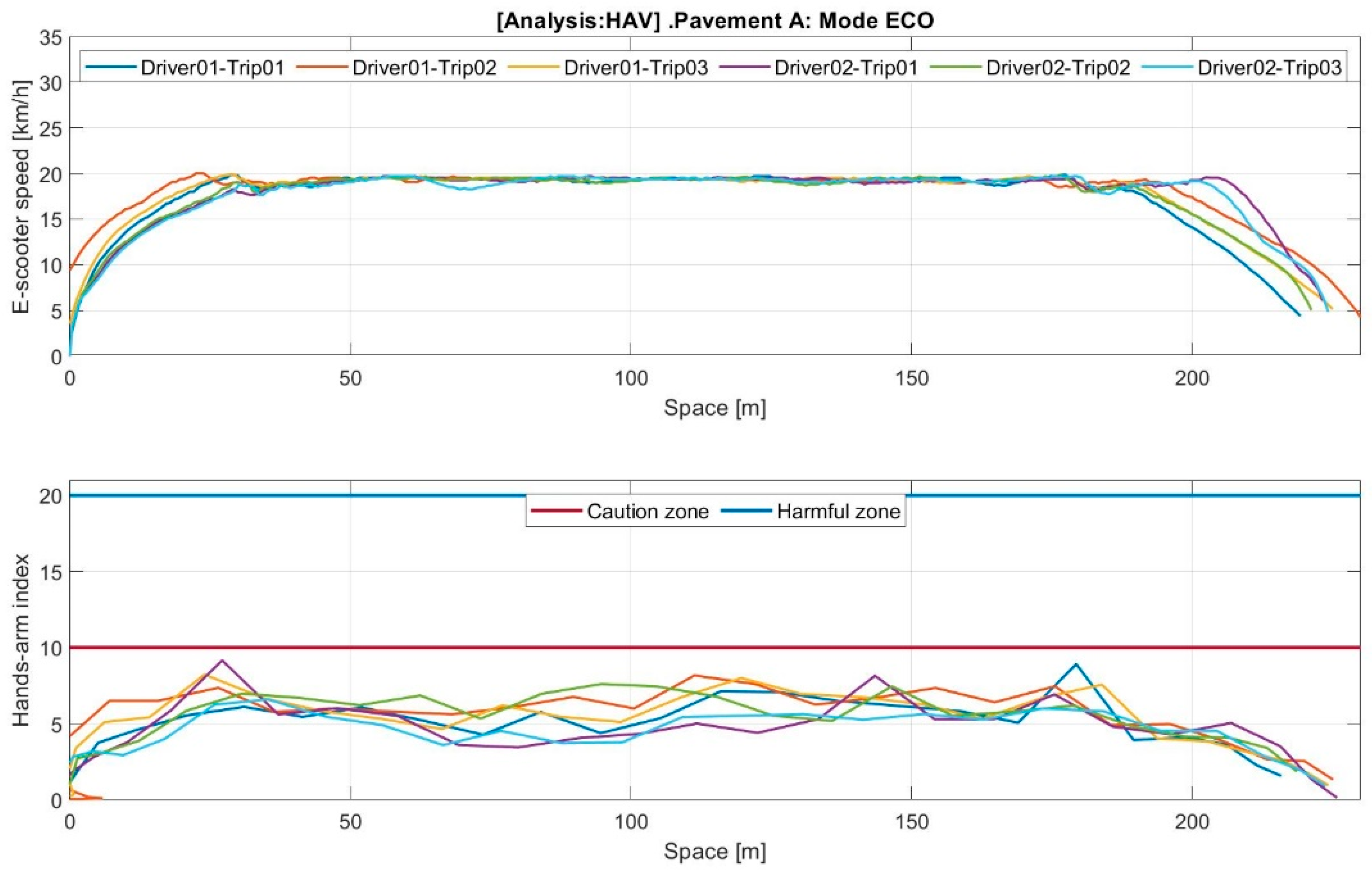
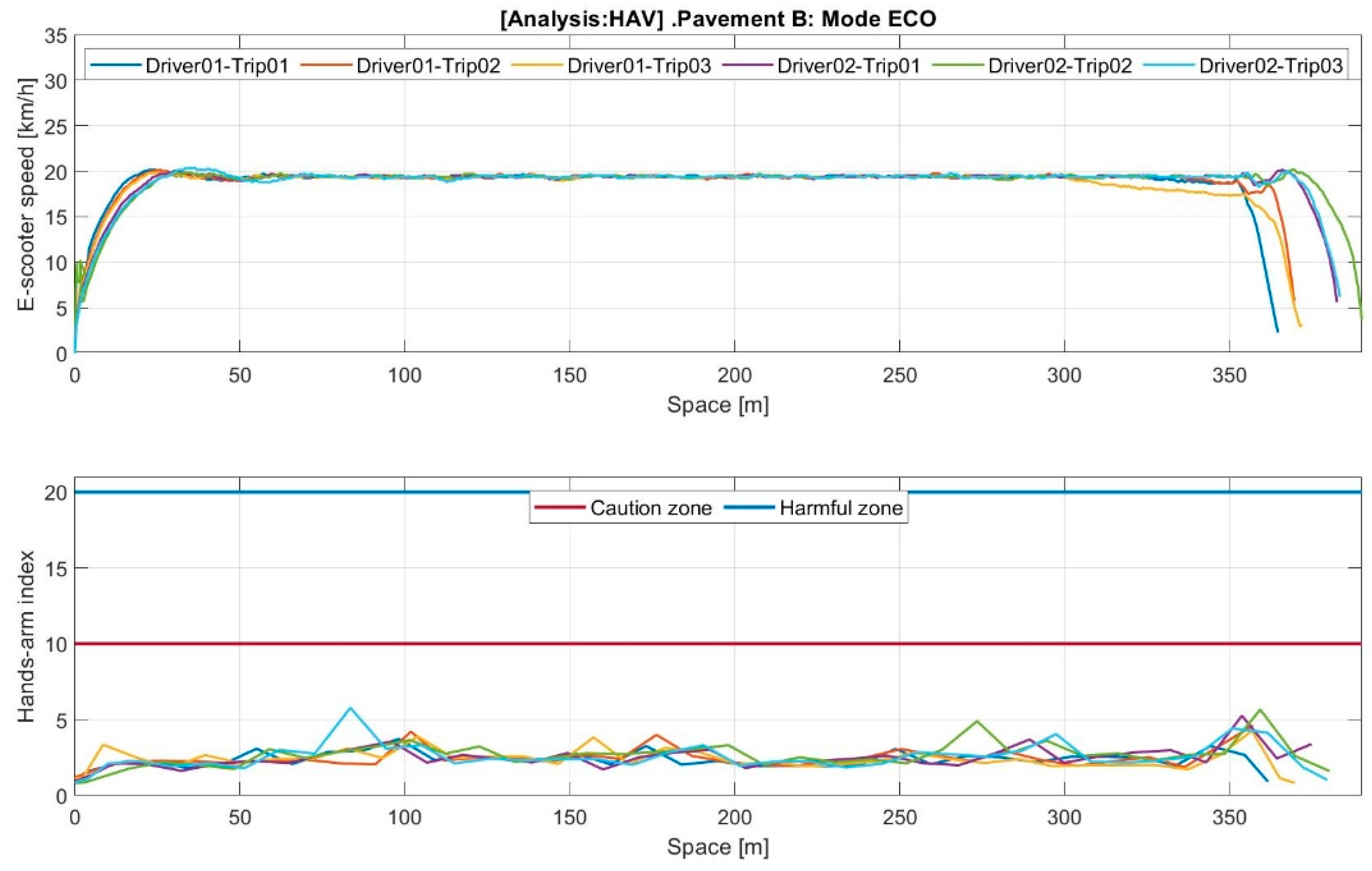
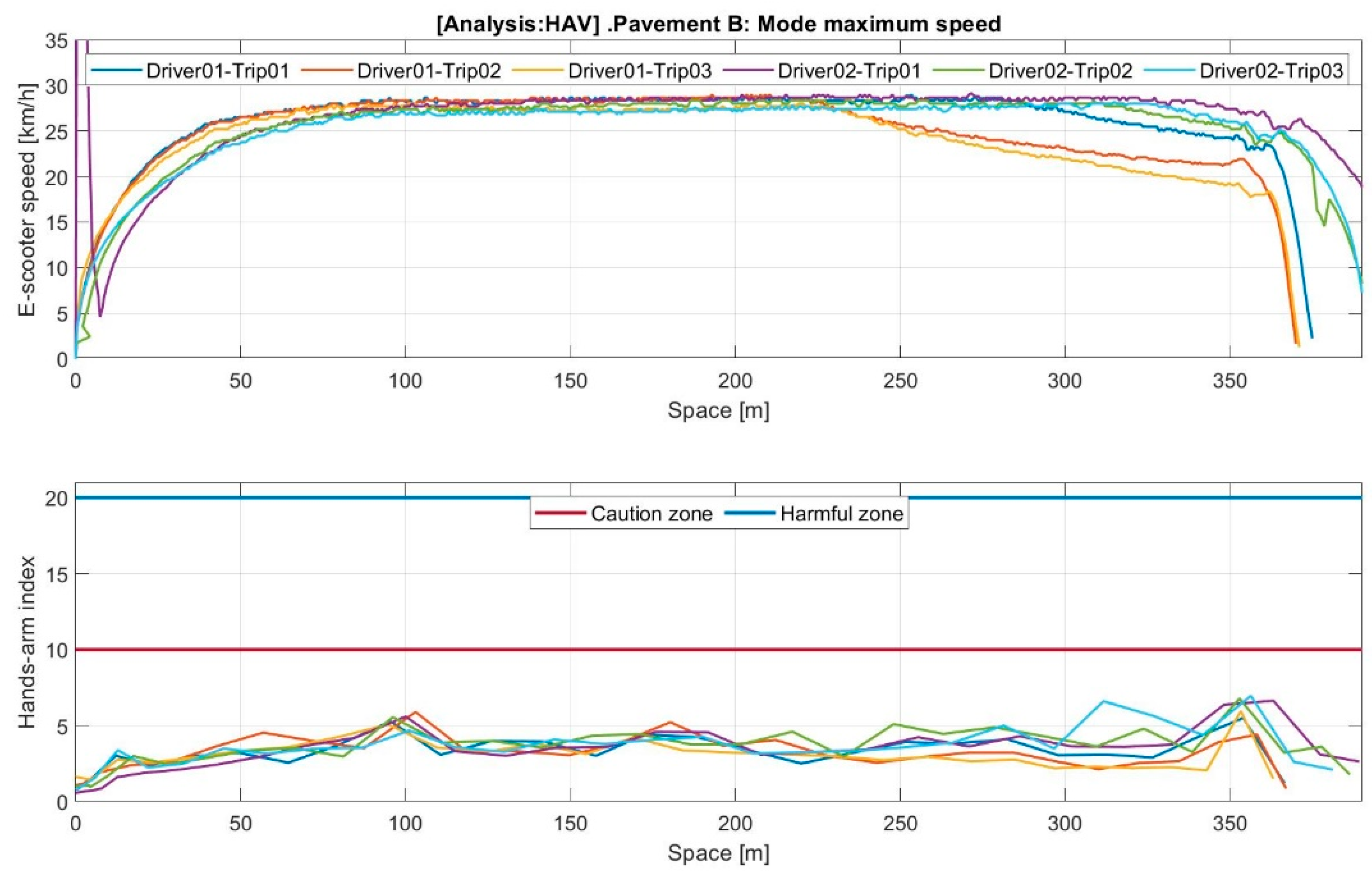
- Acceleration and HAV in the range 10–20 m/s2 were considered as HAVs in the ‘caution’ zone; when the acceleration exceeded 20 m/s2, the HAVs were considered to be in the ‘harmful’ zone.
- is the number of drivers ();
- is the number of replicas ();
- denotes the zones ();
- is the initial boundary of zone ; and
- is the final boundary of zone k.
- A(8) is the daily exposure equivalent to 8 h of receiving hand vibrations via a contact surface, and
- is the mean duration of total (lifetime) exposure (years).
3. Results and Discussions
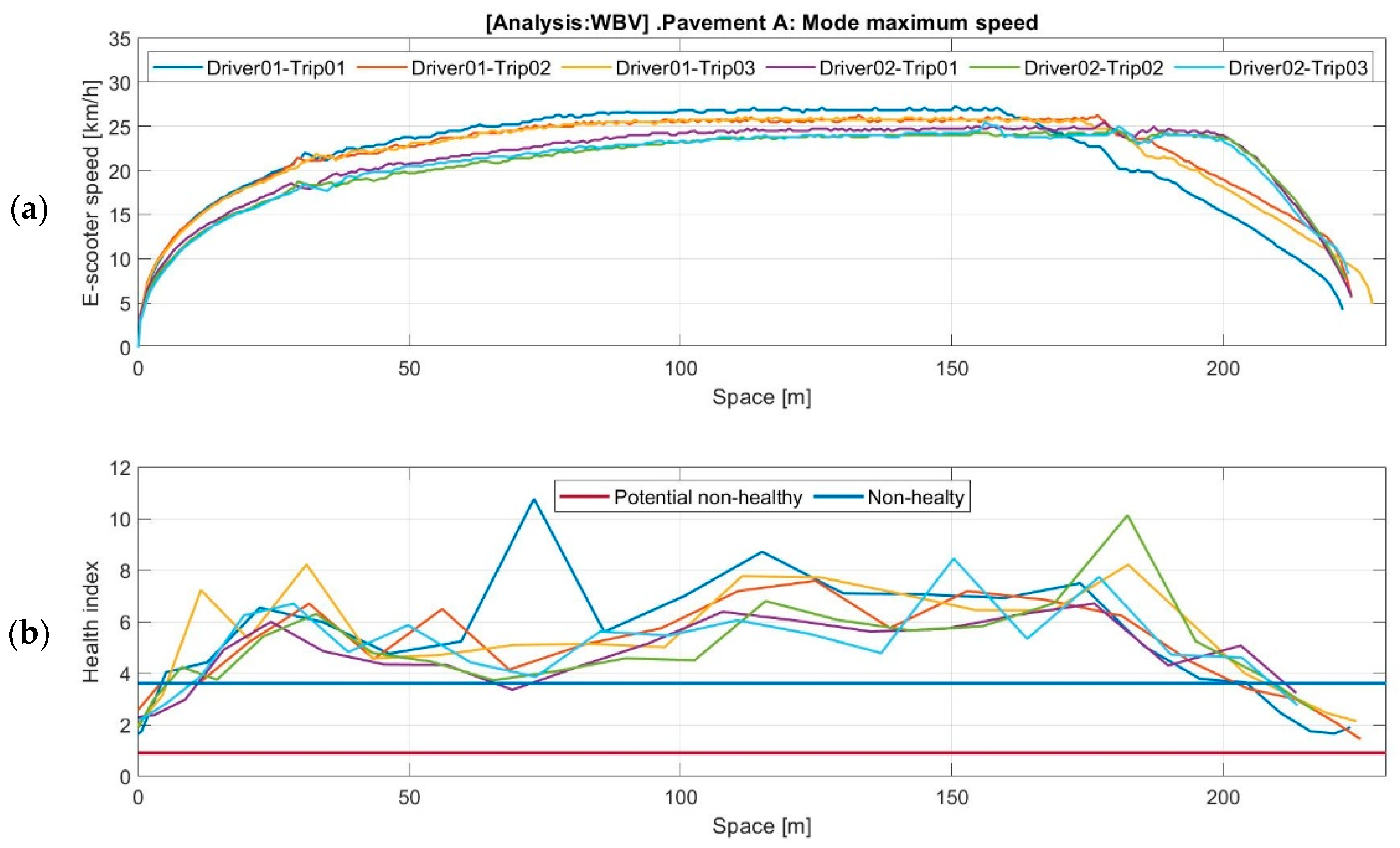
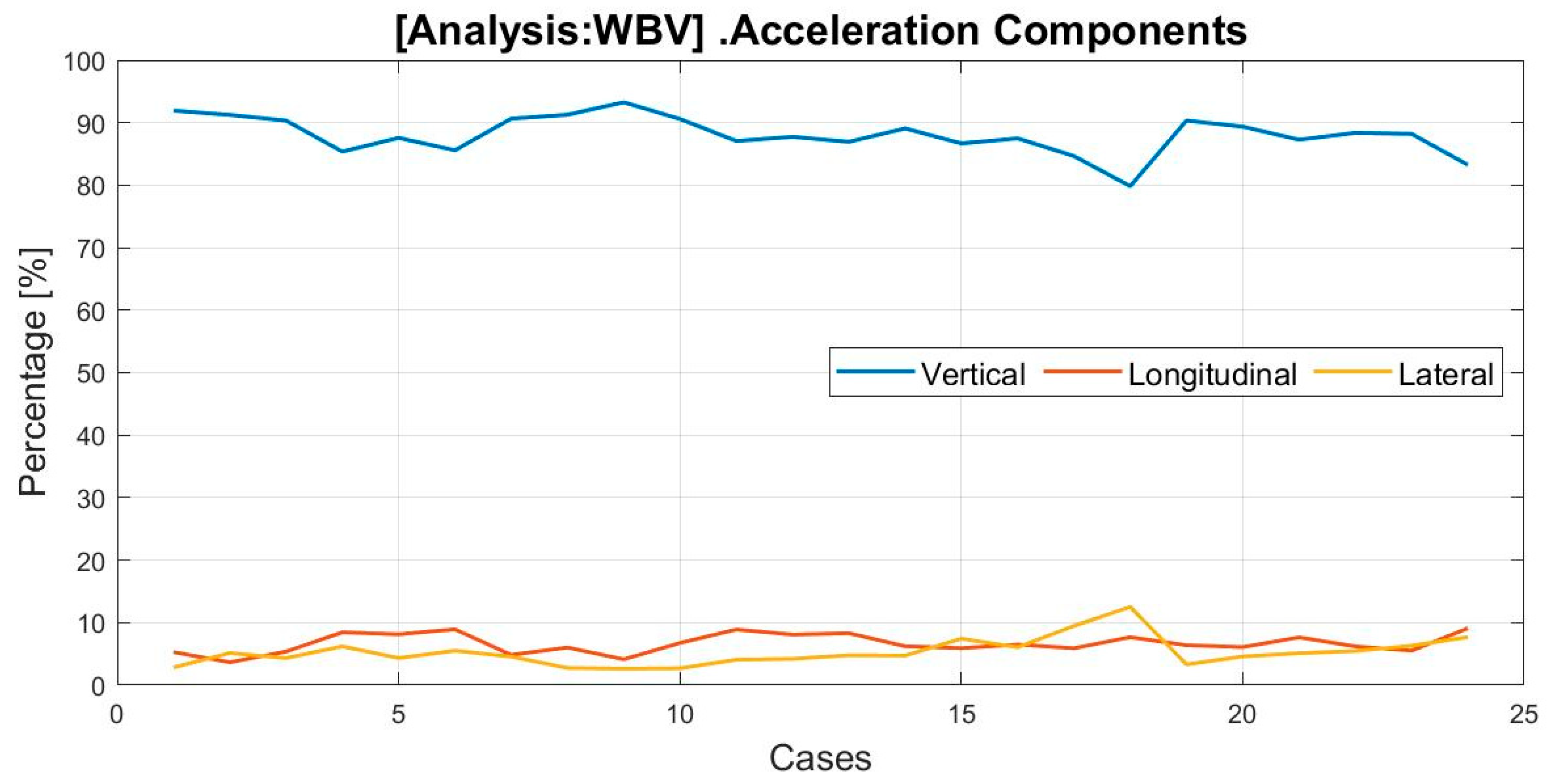
3.1. Whole-Body Vibrations (WBVs)
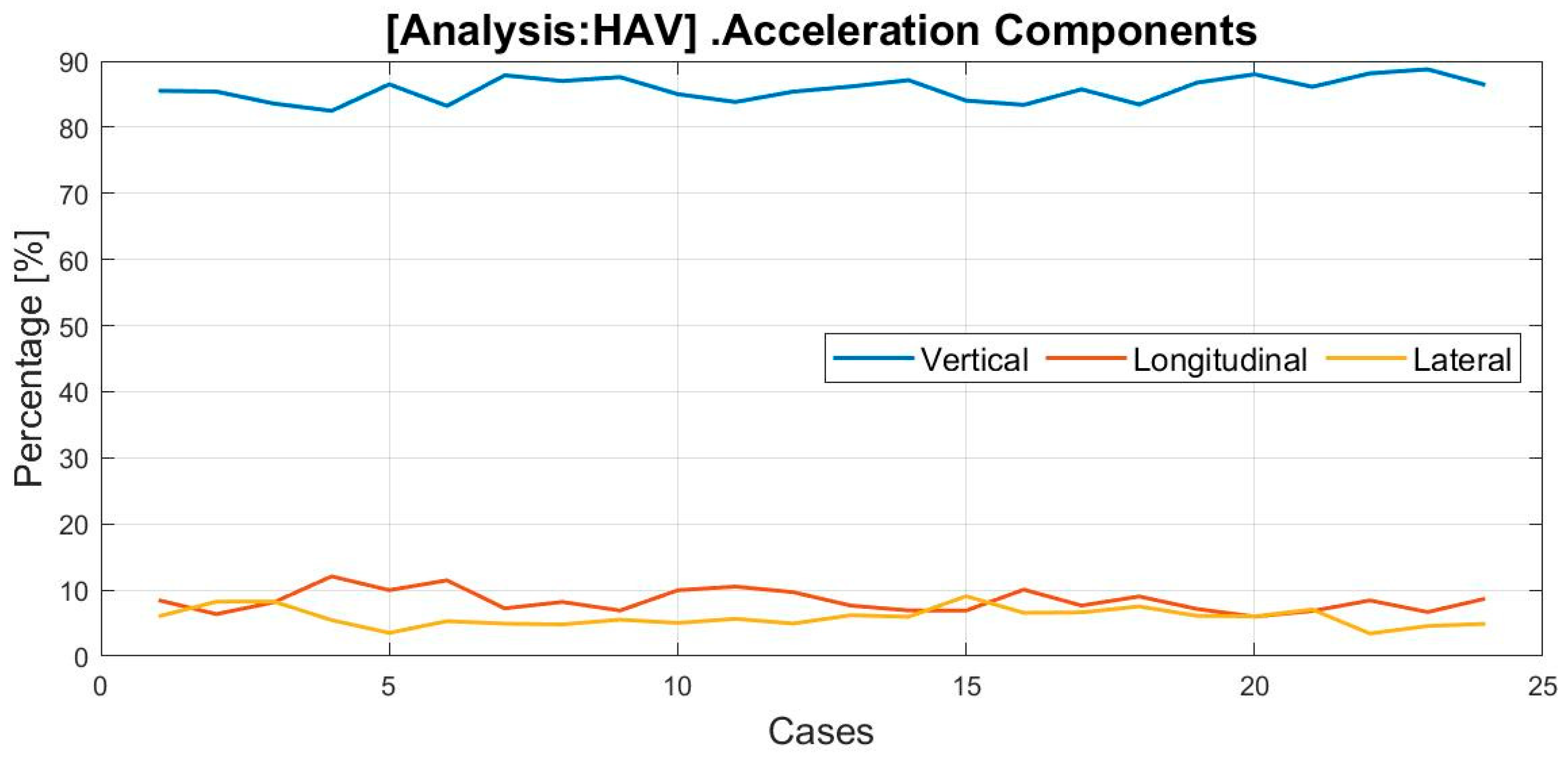
3.2. Hand–Arm Vibrations (HAVs)
Raynaud Syndrome
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Whole-Body Vibrations on Time Domain




Appendix A.2. Hand–Arm Vibrations




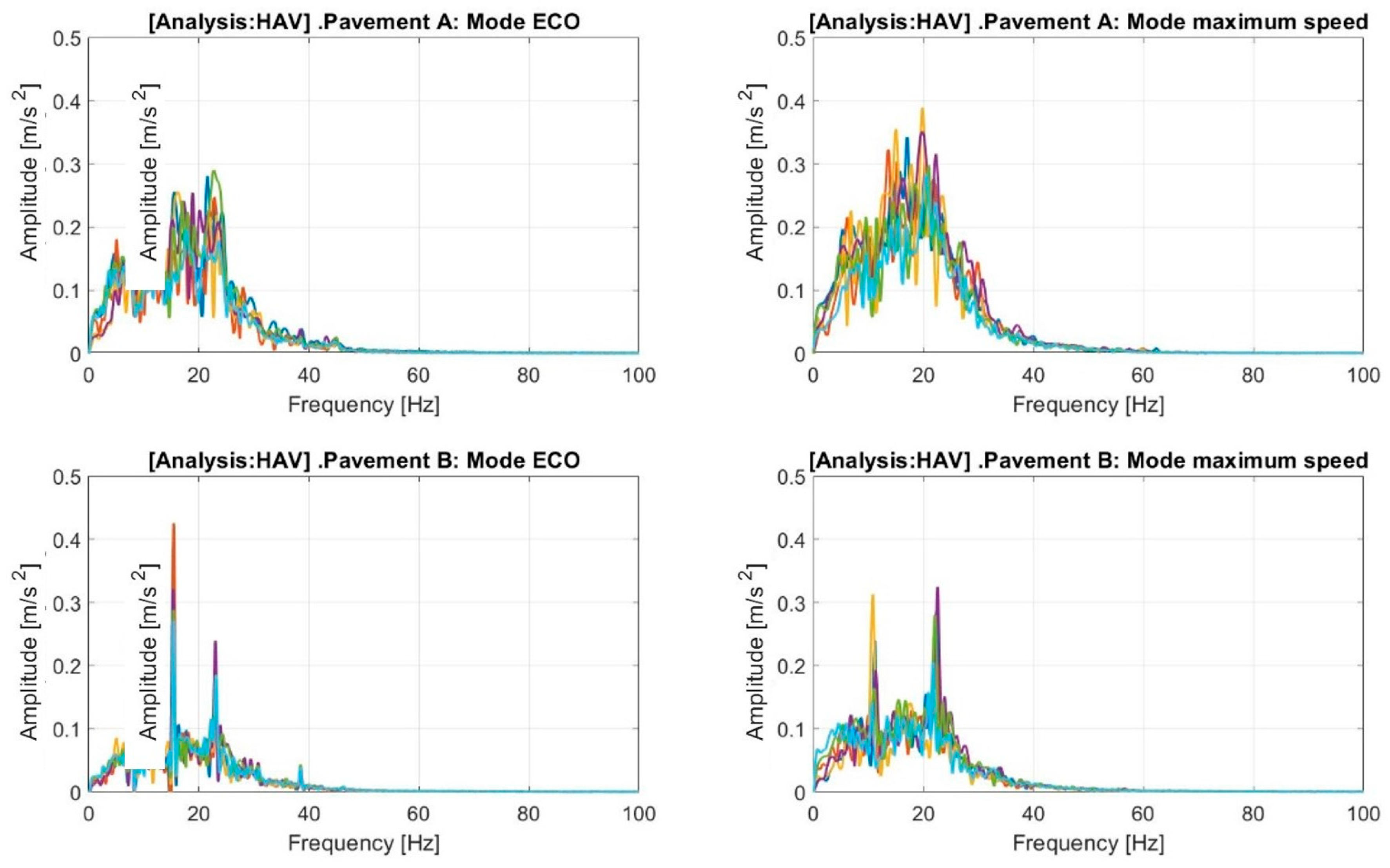
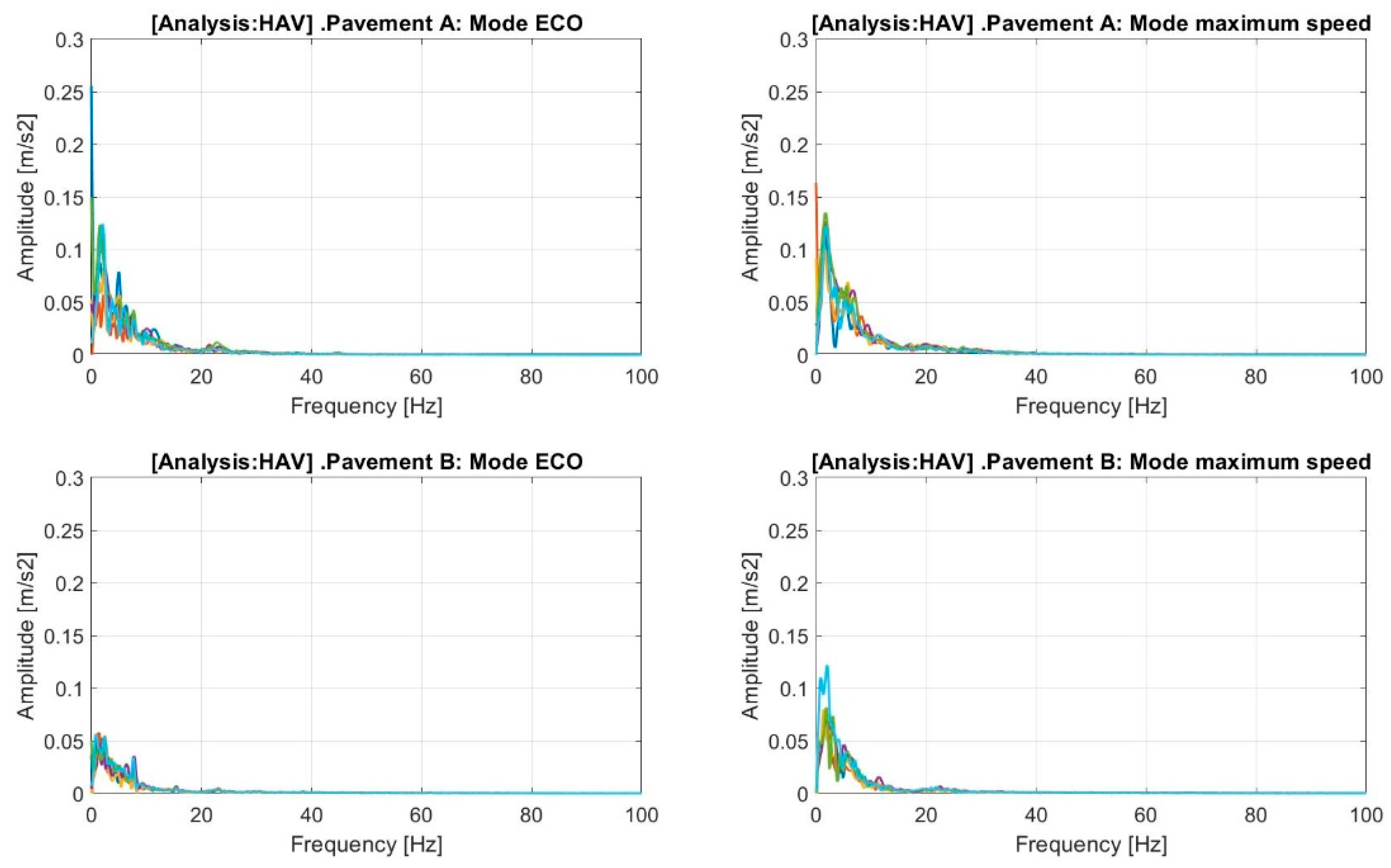
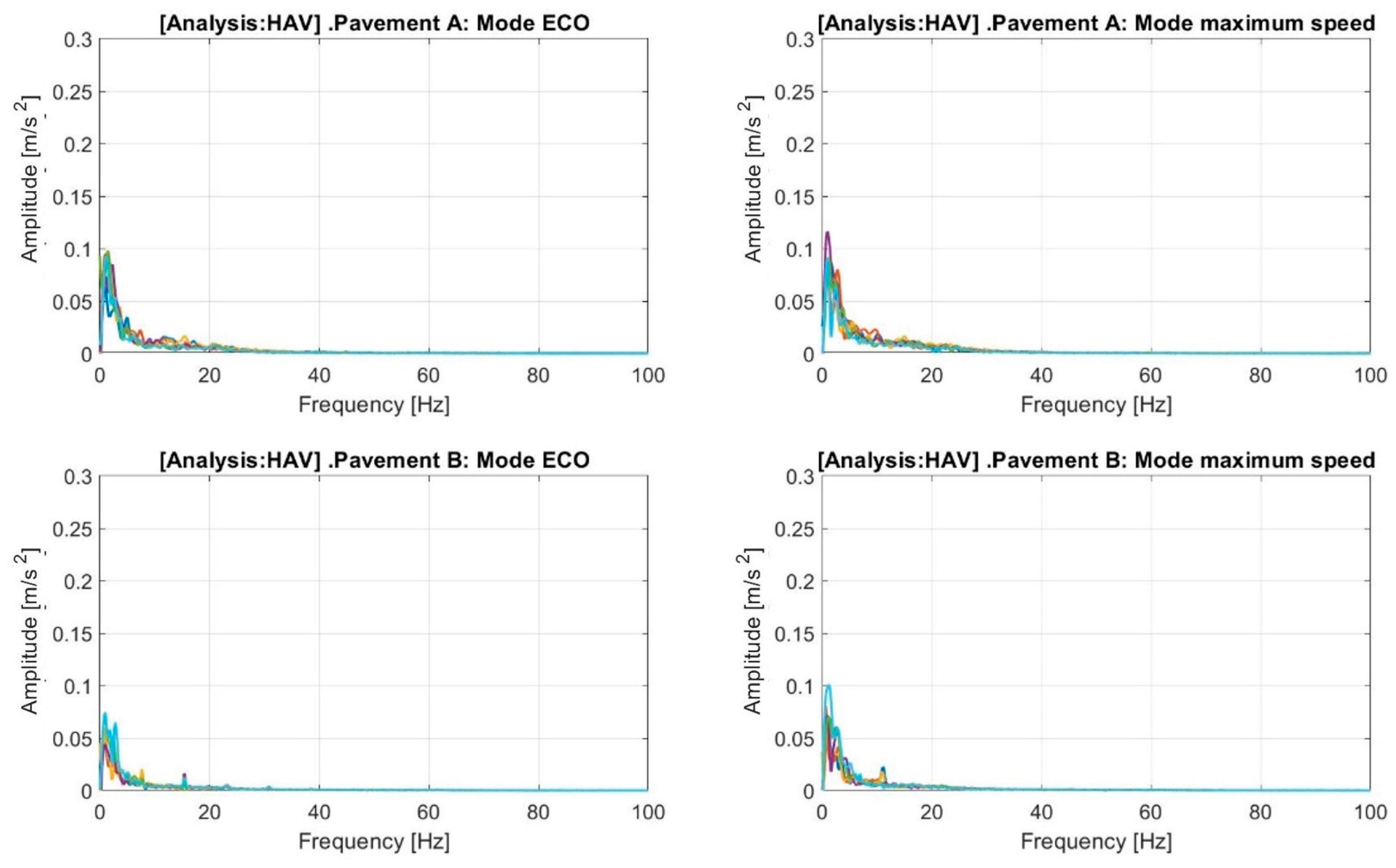
Appendix A.3. E-Scooter Accelerations on Frequency Domain



References
- Savage, R.; Billing, D.; Furnell, A.; Netto, K.; Aisbett, B. Whole-Body Vibration and Occupational Physical Performance: A Review. Int. Arch. Occup. Environ. Health 2016, 89, 181–197. [Google Scholar] [CrossRef]
- Krajnak, K. Health Effects Associated with Occupational Exposure to Hand-Arm or Whole Body Vibration. J. Toxicol. Environ. Health-Part B-Crit. Rev. 2018, 21, 320–334. [Google Scholar] [CrossRef]
- Nelson, C.M.; Brereton, P.F. The European Vibration Directive. Ind. Health 2005, 43, 472–479. [Google Scholar] [CrossRef] [Green Version]
- Standar UNE-EN ISO 5349-2:2002; Mechanical Vibration—Measurement and Evaluation of Human Exposure to Hand- Transmitted Vibration—Part 1: General Requirements. International Organization for Standardization: Geneva, Switzerland, 2001.
- Standar UNE-ISO 2631-1:2008; Mechanical Vibration and Shock. Evaluation of Human Exposure to Whole-Body Vibration. Part 1: General Requirements. International Organization for Standardization: Geneva, Switzerland, 2001.
- Deboli, R.; Calvo, A.; Preti, C. Vibration and Impulsivity Analysis of Hand Held Olive Beaters. Appl. Ergon. 2016, 55, 258–267. [Google Scholar] [CrossRef]
- Nilsson, T.; Wahlström, J.; Burström, L. Hand-Arm Vibration and the Risk of Vascular and Neurological Diseases—A Systematic Review and Meta-Analysis. PLoS ONE 2017, 12, e0180795. [Google Scholar] [CrossRef] [Green Version]
- Scholz, M.; Brammer, A.; Marburg, S. Exposure–Response Relation for Vibration-Induced White Finger: Inferences from a Published Meta-Analysis of Population Groups. Int. Arch. Occup. Environ. Health 2023, 96, 757–770. [Google Scholar] [CrossRef]
- Santos, J.; Garcia, J.; Miguel-Dávila, J. Hand-Arm Vibration Risk Assessment. Dyna 2008, 83, 214–220. [Google Scholar]
- Jayachandran, R.; Krishnapillai, S. Modeling and Optimization of Passive and Semi-Active Suspension Systems for Passenger Cars to Improve Ride Comfort and Isolate Engine Vibration. J. Vib. Control 2013, 19, 1471–1479. [Google Scholar] [CrossRef]
- Jiang, X.; Yan, F.; Chen, W.; Wang, H. Improving Ride Comfort of a Heavy Truck; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Cossalter, V.; Doria, A.; Garbin, S.; Lot, R. Frequency-Domain Method for Evaluating the Ride Comfort of a Motorcycle. Veh. Syst. Dyn. 2006, 44, 339–355. [Google Scholar] [CrossRef]
- Zhu, S.; Zhu, F. Cycling Comfort Evaluation with Instrumented Probe Bicycle. Transp. Res. Part A Policy Pract. 2019, 129, 217–231. [Google Scholar] [CrossRef]
- Ventura, R.; Ghirardi, A.; Vetturi, D.; Maternini, G.; Barabino, B. A Framework for Comparing the Vibrational Behaviour of E-Kick Scooters and E-Bikes. Evidence from Italy. SSRN Electron. J. 2022. [Google Scholar] [CrossRef]
- Michelangelo-Gulino, S.; Vichi, G.; Zonfrillo, G.; Vangi, D. Comfort Assessment for Electric Kick Scooter Decks. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1214, 12043. [Google Scholar] [CrossRef]
- Cano-Moreno, J.D.; Cabanellas Becerra, J.M.; Arenas Reina, J.M.; Islán Marcos, M.E. Analysis of E-Scooter Vibrations Risks for Riding Comfort Based on Real Measurements. Machines 2022, 10, 688. [Google Scholar] [CrossRef]
- Cano-Moreno, J.D.; Islán, M.; Blaya, F.; D’Amato, R.; Juanes, J.; Soriano, E. Methodology for the Study of the Influence of E-Scooter Vibrations on Human Health and Comfort. In Seventh International Conference on Technological Ecosystems for Enhancing Multiculturality (TEEM’19); ACM: León, Spain, 2019; pp. 445–451. ISBN 978-1-4503-7191-9. [Google Scholar]
- Li, H.; Yuan, Z.; Novack, T.; Huang, W.; Zipf, A. Understanding Spatiotemporal Trip Purposes of Urban Micro-Mobility from the Lens of Dockless e-Scooter Sharing. Comput. Environ. Urban Syst. 2022, 96, 101848. [Google Scholar] [CrossRef]
- Hardt, C.; Bogenberger, K. Usage of E-Scooters in Urban Environments. Transp. Res. Procedia 2019, 37, 155–162. [Google Scholar] [CrossRef]
- Caspi, O.; Smart, M.J.; Noland, R.B. Spatial Associations of Dockless Shared E-Scooter Usage. Transp. Res. Part D Transp. Environ. 2020, 86, 102396. [Google Scholar] [CrossRef]
- Mathew, J.K.; Liu, M.; Seeder, S.; Li, H.; Bullock, D.M. Analysis of E-Scooter Trips and Their Temporal Usage Patterns. Inst. Transp. Eng. ITE J. Wash. 2019, 89, 44–49. [Google Scholar]
- Foissaud, N.; Gioldasis, C.; Tamura, S.; Christoforou, Z.; Farhi, N. Free-Floating e-Scooter Usage in Urban Areas: A Spatiotemporal Analysis. J. Transp. Geogr. 2022, 100, 103335. [Google Scholar] [CrossRef]
- Li, A.; Zhao, P.; Liu, X.; Mansourian, A.; Axhausen, K.W.; Qu, X. Comprehensive Comparison of E-Scooter Sharing Mobility: Evidence from 30 European Cities. Transp. Res. Part D Transp. Environ. 2022, 105, 103229. [Google Scholar] [CrossRef]
- UNE-EN ISO 8041-1:2018; Human Response to Vibration—Measuring Instrumentation—Part 1: General Purpose Vibration Meters. ISO: Geneva, Switzerland, 2017.
- Monopatín Eléctrico INFINITON EASYWAY Citycross-Blanco, 28 km/h, Autonomía Hasta 20 km. Available online: https://infiniton.es/movilidad/563-easyway-citycross-blanco.html (accessed on 7 February 2022).
- Ivorra Zaragoza, B.; Nuere Menéndez-Pidal, S.; Gomez Martin, S.; Cano-Moreno, J.D.; Bezal Rubio, M.B. Design and Vibrations in the Rotary Hammer. Dyna 2022, 97, 126–130. [Google Scholar] [CrossRef]
- Reynolds, D.D.; Angevine, E.N. Hand-Arm Vibration, Part II: Vibration Transmission Characteristics of the Hand and Arm. J. Sound Vib. 1977, 51, 255–265. [Google Scholar] [CrossRef]
- Noël, B. Raynaud’s Phenomenon in Workers Exposed to Vibration. Occup. Environ. Med. 2001, 58, 279–280. [Google Scholar] [CrossRef] [Green Version]
- Banister, P.A.; Smith, F.V. Vibration-Induced White Fingers and Manipulative Dexterity. Br. J. Ind. Med. 1972, 29, 264–267. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gayraud, M. Raynaud’s Phenomenon. Jt. Bone Spine 2007, 74, e1–e8. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Al-Qadi, I.L. Mechanistic Excess Fuel Consumption of a 3D Passenger Vehicle on Rough Pavements. J. Transp. Eng. Part B Pavements 2023, 149, 4022065. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Location | Mean Time (min) | Mean Distance (km) |
|---|---|---|---|
| Hao Li et al. [18] | Washington D.C. | 11.7 * | 1.0 |
| Cornelius et Klaus [19] | Germany | 42.4 * | 10.6 |
| Caspi et al. [20] | Texas | 6.6 | 1.0 |
| Mathew et al. [21] | Chicago | 13.8 | 1.8 * |
| Foissaud et al. [22] | Europe | 12 * | 2.5 * |
| Li et al. [23] | Europe | 9.7 * | 1.4 * |
| Criteria (Equation) | Mathematical Expressions | ||||||
|---|---|---|---|---|---|---|---|
| WBV | UNE-2631 (Equation (6)) | 4 | 0.45 | 0.8 | 0.9 | 1.6 | |
| UNE-2631 (Equation (7)) | 4 | 0.5 | 0.9 | 2 | 3.6 | ||
| HAV | European Directive (Equation (7)) | 8 | 2.5 | 5 | 10 | 20 |
| Pavement | Speed Mode | Zone A (0–0.9 m/s2) | Zone B (pn-h) (0.9–3.6 m/s2) | Zone C (n-h) (3.6–∞ m/s2) |
|---|---|---|---|---|
| Type A: Pavers | ECO | 13.89% | 30.00% | 56.11% |
| MAX | 11.03% | 21.38% | 67.59% | |
| Mean value (A) | 12.46% | 25.69% | 61.85% | |
| Type B: Asphalt | ECO | 4.22% | 90.30% | 5.49% |
| MAX | 4.84% | 74.73% | 20.43% | |
| Mean value (B) | 4.53% | 82.52% | 12.96% | |
| Mean value (A and B) | 8.50% | 54.10% | 37.41% |
| Pavement | Speed Mode | Zone A (0–10 m/s2) | Zone B (Caution) (10–20 m/s2) | Zone C (Harmful) (20–∞ m/s2) |
|---|---|---|---|---|
| Type A: Pavers | ECO | 100% | 0% | 0% |
| MAX | 99.31% | 0% | 0% | |
| Mean value (A) | 99.66% | 0% | 0% | |
| Type B: Asphalt | ECO | 100% | 0% | 0% |
| MAX | 100% | 0.54% | 0% | |
| Mean value (B) | 100% | 0.27% | 0% | |
| Mean value (A and B) | 99.83% | 0.62% | 0% |
| Pavement | Speed Mode | HAV Mean Value (m/s2) | A(8) (m/s2) | Dy (Years) |
|---|---|---|---|---|
| Type A: Pavers | ECO | 4.2514 | 1.06 | 30.0 |
| MAX | 4.9765 | 1.24 | 25.9 | |
| Mean value (A) | 4.61 | 1.15 | 27.8 | |
| Type B: Asphalt | ECO | 2.3436 | 0.59 | 52.7 |
| MAX | 3.1539 | 0.79 | 39.8 | |
| Mean value (B) | 2.75 | 0.69 | 45.3 | |
| Mean value (A and B) | 3.68 | 0.92 | 43.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cano-Moreno, J.D.; Cabanellas Becerra, J.M.; Arenas Reina, J.M.; Islán Marcos, M.E. Analysis of E-Scooter Vibrations from Health Perspective: A Case Study. Machines 2023, 11, 761. https://doi.org/10.3390/machines11070761
Cano-Moreno JD, Cabanellas Becerra JM, Arenas Reina JM, Islán Marcos ME. Analysis of E-Scooter Vibrations from Health Perspective: A Case Study. Machines. 2023; 11(7):761. https://doi.org/10.3390/machines11070761
Chicago/Turabian StyleCano-Moreno, Juan David, José María Cabanellas Becerra, José Manuel Arenas Reina, and Manuel Enrique Islán Marcos. 2023. "Analysis of E-Scooter Vibrations from Health Perspective: A Case Study" Machines 11, no. 7: 761. https://doi.org/10.3390/machines11070761
APA StyleCano-Moreno, J. D., Cabanellas Becerra, J. M., Arenas Reina, J. M., & Islán Marcos, M. E. (2023). Analysis of E-Scooter Vibrations from Health Perspective: A Case Study. Machines, 11(7), 761. https://doi.org/10.3390/machines11070761