
Optimization of a 6-DOF Platform for Simulators Based on an Analysis of Structural and Force Parameters



Abstract
:1. Introduction
- 1.
- Most of them are used as flight simulators, as well as for training cosmonauts for manned flights.
- 2.
- To train drivers of ground vehicles, simulators are used on the basis of either three-stage platforms or a stationary platform to simulate a driver’s cab or seat with a virtual display of the vehicle’s movement.
2. Requirements for the Automotive Driving Simulator
- 1.
- Movement velocity: This parameter determines the velocity of movement of the simulator cabin in accordance with the actions of the driver.
- 2.
- Acceleration and deceleration: These parameters determine how fast the simulator cabin can accelerate and decelerate depending on the actions of the driver.
- 3.
- Tilt angle: This parameter determines the angle of inclination of the simulator cab when turning and changing the direction of movement.
- 4.
- Vibration: This parameter determines the degree of vibration that the simulator cabin experiences when driving on various surfaces.
- 5.
- Suspension height: This parameter determines the height of the treadmill cabin suspension, which allows you to create realistic effects when riding on uneven terrain.
- 6.
- Rigidity factor: This parameter determines the stiffness of the simulator cab suspension, which allows you to create realistic effects when driving on various surfaces.
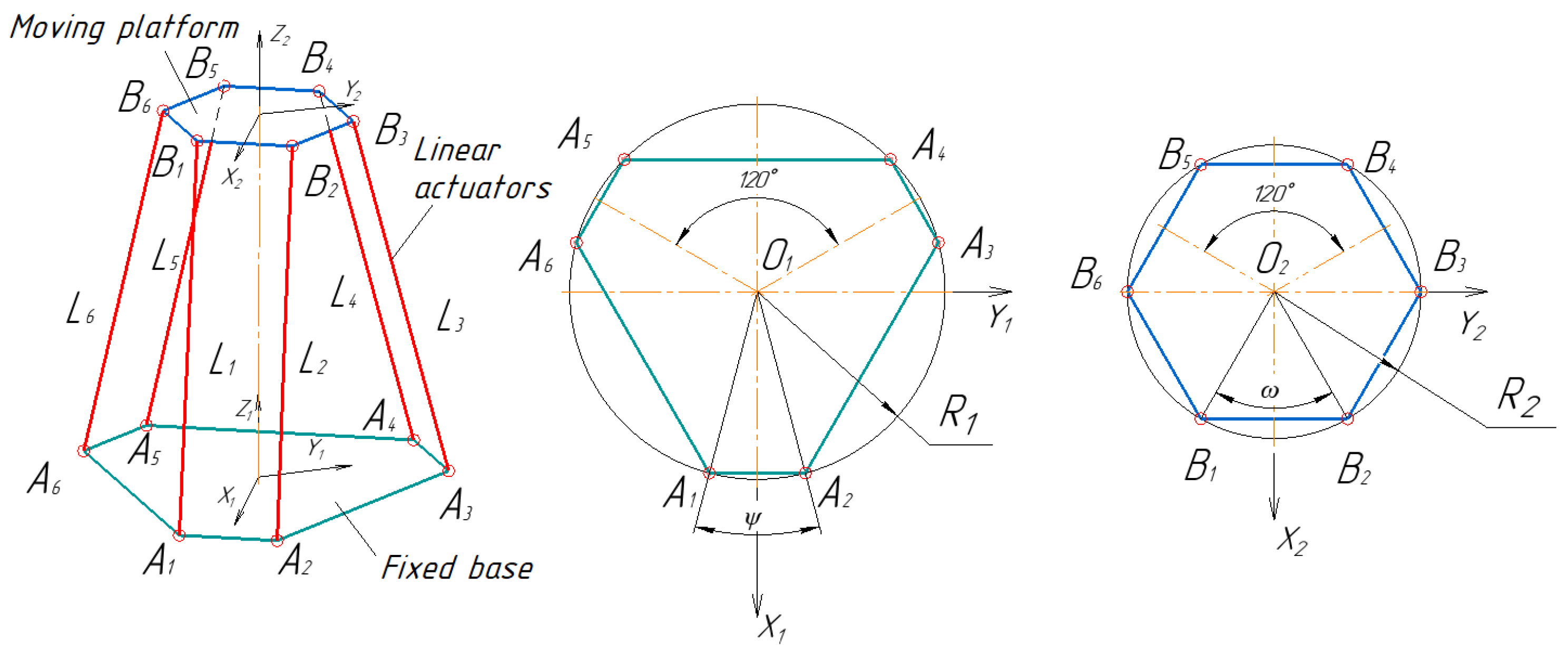
3. Mathematical Model of the Platform
4. Setting the Optimization Problem
4.1. Optimization Parameters
4.2. Criteria
4.3. Compact Design
4.4. Workspace
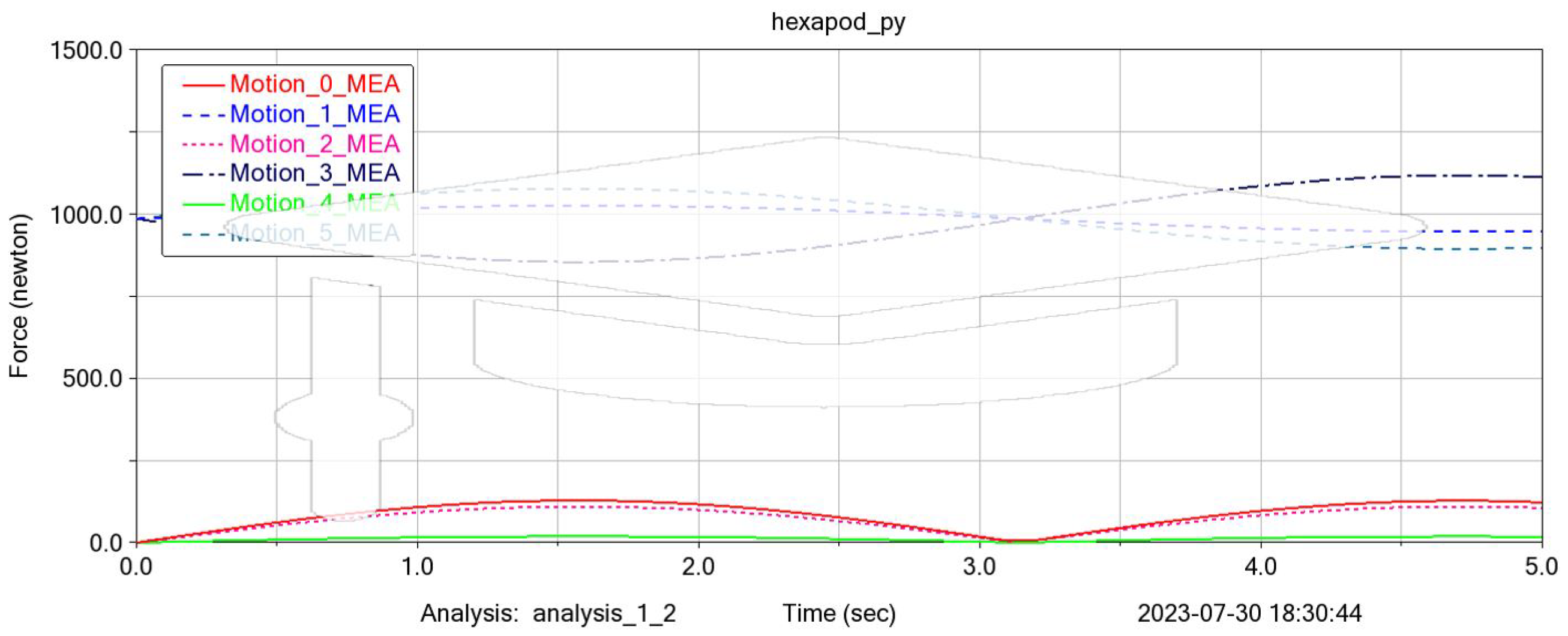
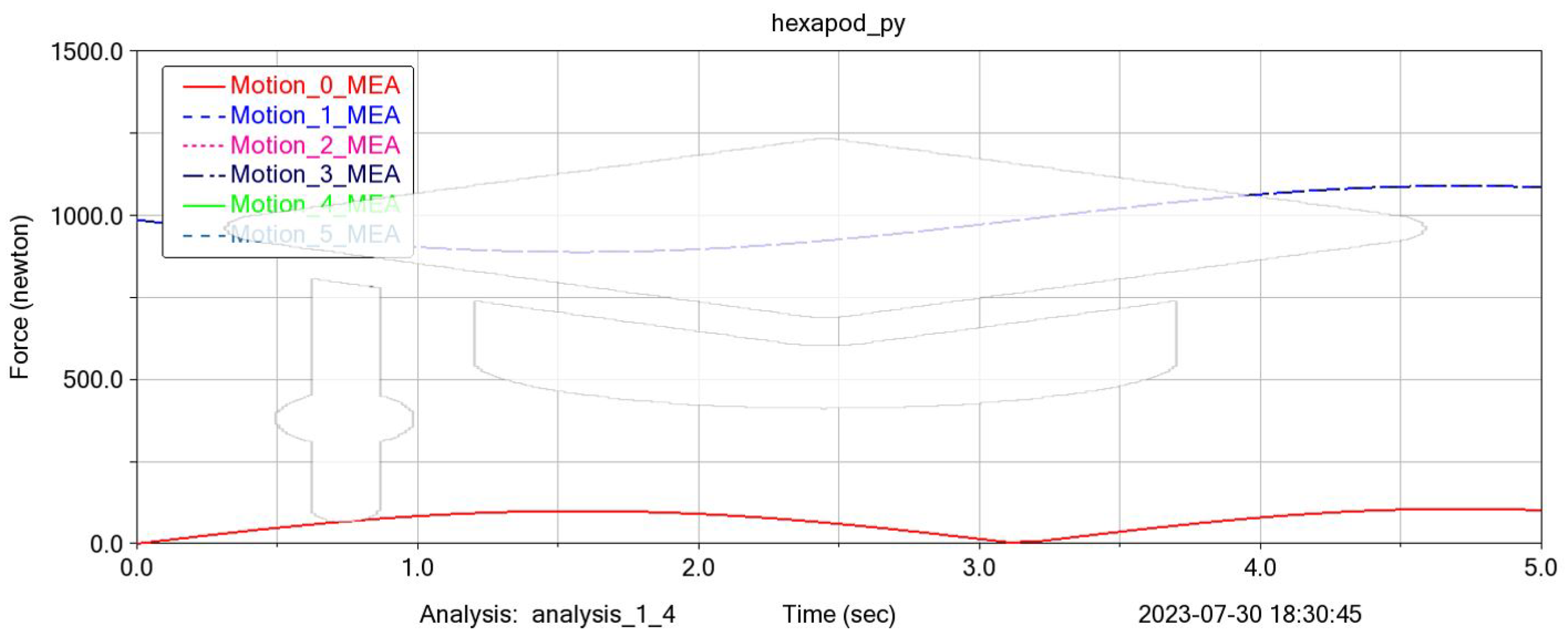
4.5. Force in Actuators
4.6. Optimization Software Package
- -
- Flag file that takes three values: 0 (Optimization Software package is waiting, Adams is running), 1 (Adams is waiting, optimization software package is running), and 2 (optimization is completed).
- -
- A file with parameters to which the optimization software package writes and from which Adams reads data for simulation.
- -
- A file with the Adams simulation results.
5. Optimization Results
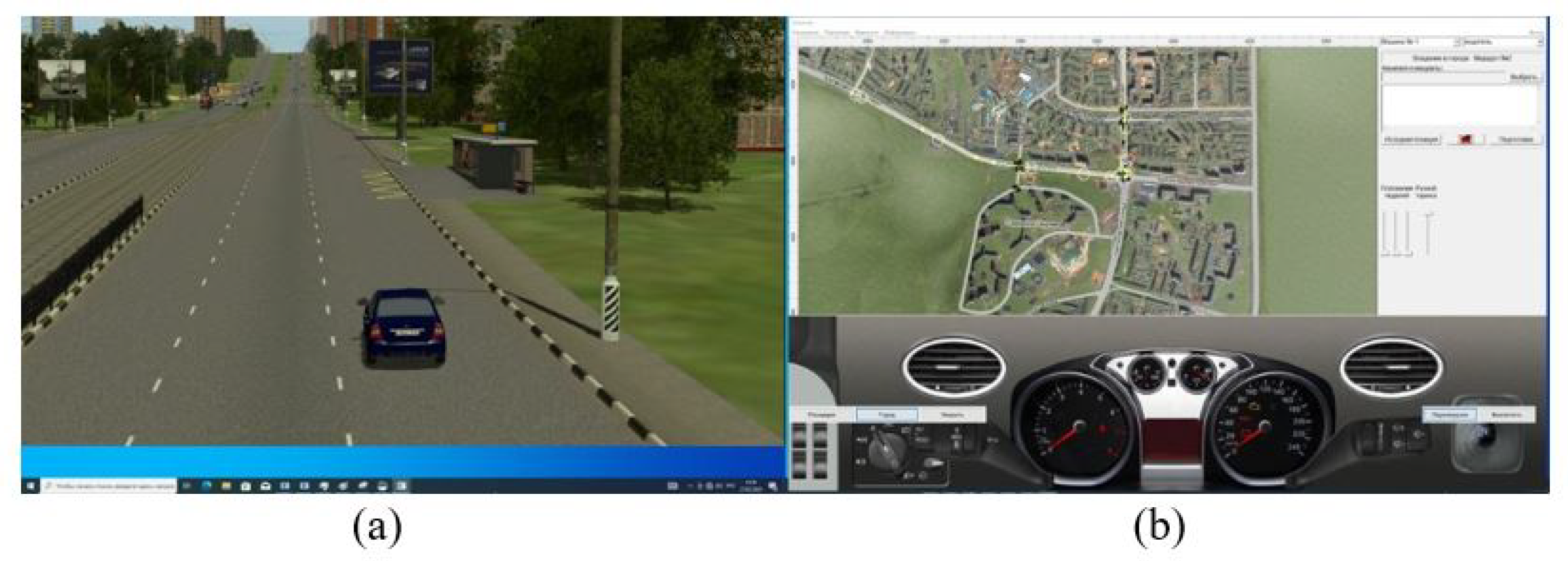
6. Digital Twin of the Automotive Driving Simulator
- -
- Automated formation of a digital terrain model (including areas of urban development) based on electronic topographic maps, libraries of three-dimensional objects, results of laser scanning of real terrain, and data from mobile complexes with precision navigation equipment;
- -
- Creation of new three-dimensional objects;
- -
- Setting up a behavioral model of dynamic objects (intelligent agents), developed using the principles of multiagent systems;
- -
- Creation of sets of exercises with various emergency situations for trainees.
7. Laboratory Testing of the Prototype
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ribeiro, P.R.; Andre, M.; Philipp, K.; Karel, K.A. VR Truck Docking Simulator Platform for Developing Personalized Driver Assistance. Appl. Sci. 2021, 11, 8911. [Google Scholar] [CrossRef]
- Andres, E.G.; Tiago, K.S.; Carlos, M.M.; Arthur, M.N. Driving Simulator Platform for Development and Evaluation of Safety and Emergency Systems; Cornelll University Library: Ithaca, NY, USA, 2018. [Google Scholar]
- Valentino, K.; Kevin, K.; Singgih, J.; Endra, D. Dynamic Models Based Virtual Reality Flight Simulator. Internetworking Indones. J. 2022, 11, 23–28. [Google Scholar]
- Akulov, A.S.; Zheleznov, K.I.; Zabolotny, A.M.; Chabanyuk, E.V. Simulator for training mining locomotive drivers. Min.-Geol.-Pet. Eng. Bull. 2022, 37, 27–35. [Google Scholar]
- Schmieder, H.; Nagel, K.; Schoener, H. Enhancing a Driving Simulator with a 3D-Stereo Projection System. In Proceedings of the Driving Simulation Conference—DSC 2017, Stuttgart, Germany, 6–8 September 2017. [Google Scholar]
- Chen, G.; Dian, L.; Huan, C.; Haibo, C. Design and Kinematic Analysis of a Novel Flight Simulator Mechanism. In Proceedings of the 7th International Conference on Intelligent Robotics and Applications, Guangzhou, China, 17–20 December 2014. [Google Scholar]
- Zhou, X.B.; Fan, M.Y.; Chen, X. Design and Implementation of Instructors Operating Station for Flight Simulator. (Article) 2012. Available online: https://www.researchgate.net/publication/290524149_Design_and_implementation_of_instructors_operating_station_for_flight_simulator (accessed on 10 June 2023).
- Obaid, M.S.; Mebayet, S. Drone controlled real live flight simulator. J. Phys. 2021, 1818, 121104. [Google Scholar] [CrossRef]
- Gao, S.; Lei, D.; Liao, Q.; Zhang, G. Generalized Stewart-Gough platforms and their direct kinematics. IEEE Trans. Robot. 2005, 21, 141–151. [Google Scholar]
- Landman, A.; Hoed, A.; Baelen, D.; Stroosma, O. A Procedure for Inducing the Leans Illusion in a Hexapod Motion Simulator. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 & 19–21 January 2021. [Google Scholar]
- Rafał, N.; Bibianna, B.; Piotr, F. Susceptibility to Flight Simulator-Induced Spatial Disorientation in Pilots and Non-Pilots. Int. J. Aviat. Psychol. 2020, 30, 25–37. [Google Scholar]
- Hoed, A.; Landmann, A.; Baelen, D.; Stroosma, O. Leans Illusion in Hexapod Simulator Facilitates Erroneous Responses to Artificial Horizon in Airline Pilots. Hum. Factors J. Hum. Factors Ergon. Soc. 2020, 64, 962–972. [Google Scholar] [CrossRef]
- Marinus, B.D.; Zaal, P.M.; Piters, M.; Stroosma, O. Between-Simulator Comparison of Motion-Filter Order and Break Frequency Effects on Manual Control. J. Guid. Control. Dyn. 2021, 44, 1–18. [Google Scholar]
- Savona, F.; Stratual, M.A.; Diaz, E.; Honnet, V. The Influence of Lateral, Roll and Yaw Motion Gains on Driving Performance on an Advanced Dynamic Simulator. In Proceedings of the The Sixth International Conference on Advances in System Simulation, Nice, France, 12–16 October 2014. [Google Scholar]
- Dasmahapatra, S.; Ghosh, M. Workspace Identification of Stewart Platform. Int. J. Eng. Adv. Technol. 2020, 19, 1903–1907. [Google Scholar] [CrossRef]
- Li, S.; Jin, L.; Mirza, M. Neural Network Based Stewart Platform Control; Wiley-IEEE Press: Hoboken, NJ, USA, 2019; Volume 7, pp. 105–129. [Google Scholar]
- Seidakhmet, A.Z.; Abduraimov, A.E.; Kamal, A.N. Using inverse kinematics and the Matlab system to control the Stewart lever platform. Int. J. Appl. Fundam. Res. 2017, 8, 216–220. [Google Scholar]
- Ermilov, G.S. Development of simulator control systems based on the Stewart platform. Colloq. J. 2020, 12, 11–21. [Google Scholar]
- Bruzzone, L.; Polloni, A. Fractional Order KDHD Impedance Control of the Stewart Platform. Machines 2022, 10, 604. [Google Scholar] [CrossRef]
- Liang, F.; Tan, S.; Fan, J.; Lin, Z.; Kang, X. Design and Implementation of a High Precision Stewart Platform for a Space Camera. J. Phys. Conf. Ser. 2021, 2101, 12015. [Google Scholar] [CrossRef]
- Karakas, B.; Senay, B. Kinematics of Supination and Pronation with Stewart Platform. J. Math. Sci. Model. 2021, 4, 1–6. [Google Scholar] [CrossRef]
- Jakobovic, D. Forward Kinematics of a Stewart Platform Mechanism; CiteSeer: University Park, PA, USA, 2002. [Google Scholar]
- Shiakolas, P.S.; Koladiya, D.; Kebrle, J. Optimum robot design based on task specifications using evolutionary techniques kinematic, dynamic, and structural constraints. Inverse Prob. 2002, 10, 359–375. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.; Chen, I.-M. Task based optimization of modular robot configurations: Minimized degree-of-freedom approach. Mech. Mach. Theory 2000, 35, 517–540. [Google Scholar] [CrossRef]
- Pisarenko, A.; Malyshev, D.; Rybak, L.; Cherkasov, V.; Skitova, V. Application of evolutionary PSO algorithms to the problem of optimization of 6-6 UPU mobility platform geometric parameters. Procedia Comput. Sci. 2022, 213, 643–650. [Google Scholar] [CrossRef]
- Diveev, A.I.; Konstantinov, S.V. Evolutionary algorithms for the problem of optimal control. Rudn. J. Eng. Res. 2017, 18, 254–265. [Google Scholar]
- Duyun, T.; Duyun, I.; Rybak, L.; Perevuznik, V. Simulation of the structural and force parameters of a robotic platform using co-simulation. Procedia Comput. Sci. 2022, 213, 720–727. [Google Scholar] [CrossRef]
- Martínez, D.D.; Codorniu, T.R.; Giral, R.; Seisdedos, V.L. Evaluation of particle swarm optimization techniques applied to maximum power point tracking in photovoltaic systems. Circuit Theory Appl. 2021, 49, 1849–1867. [Google Scholar] [CrossRef]
- Aktuator.Ru. Available online: http://www.aktuator.ru/allproducts.shtml (accessed on 20 June 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Options | Values |
|---|---|
| Range of motion: | |
| Roll | |
| Pitch | |
| Z-axis | mm |
| X and Y-axis | mm |
| Linear acceleration | left-right, up-down: 5 m/ |
| Forward-backward: 10 m/ | |
| Angular velocity | rad/s |
| Load capacity | 300 kg |
| Type of drive | Electromechanical |
| Positioning accuracy | 1 mm |
| Number of dynamic platform drives | 6 |
| No | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 410.83 | 300.00 | 31.021 | 102.3954 | 816.81 | 1437.46 | 4407.519 |
| 2 | 427.95 | 300.00 | 88.1646 | 59.8646 | 582.24 | 1187.50 | 5165.164 |
| 3 | 422.33 | 300.00 | 64.4136 | 110 | 841.56 | 1485.99 | 4705.601 |
| 4 | 428.18 | 300.00 | 45.7356 | 10 | 918.67 | 1566.89 | 4810.621 |
| 5 | 432.33 | 300.00 | 95.2828 | 43.5364 | 703.86 | 1318.03 | 4541.053 |
| 6 | 422.00 | 300.00 | 110 | 61.2266 | 606.11 | 1239.60 | 4707.358 |
| 7 | 427.36 | 300.00 | 95.9836 | 10.47626 | 892.48 | 1537.11 | 4463.11 |
| 8 | 397.77 | 300.00 | 110 | 58.4352 | 690.26 | 1313.59 | 4813.845 |
| 9 | 428.35 | 300.00 | 10 | 66.5934 | 829.66 | 1475.83 | 4481.593 |
| 10 | 412.22 | 300.00 | 10 | 106.0262 | 946.21 | 1581.95 | 4483.961 |
| Average | 420.9305 | 300 | 66.06012 | 62.85541 | 782.7866 | 1414.395 | 4593.186 |
| Typical Platform Movements | ||||||
|---|---|---|---|---|---|---|
| No | Vertical | Longitudinal | Lateral | Pitch | Yaw | Roll |
| 1 | 1113.913519 | 1118.200734 | 1118.200734 | 1122.228604 | 1090.06293 | 1068.616117 |
| 2 | 1137.968532 | 1612.597737 | 1612.597737 | 1459.223941 | 1432.369034 | 2004.973753 |
| 3 | 1101.38261 | 1323.772902 | 1323.772902 | 1277.481789 | 1221.862417 | 1409.361263 |
| 4 | 1090.1399 | 1511.971489 | 1511.971489 | 1486.820184 | 1387.518486 | 1482.974767 |
| 5 | 1124.21538 | 1193.578113 | 1193.578113 | 1134.89315 | 1147.098345 | 1364.713017 |
| 6 | 1137.840009 | 1208.075118 | 1208.075118 | 1131.688866 | 1152.748025 | 1426.677757 |
| 7 | 1111.120241 | 1091.807567 | 1091.807567 | 1061.394061 | 1067.360589 | 1181.28907 |
| 8 | 1121.668392 | 1208.29001 | 1208.29001 | 1130.325378 | 1156.116529 | 1432.795168 |
| 9 | 1105.119262 | 1188.758689 | 1188.758689 | 1219.172991 | 1142.618837 | 1026.333806 |
| 10 | 1113.390974 | 1062.198385 | 1062.198385 | 1073.171068 | 1056.825495 | 1000.901359 |
| Typical Platform Movements | ||||||
|---|---|---|---|---|---|---|
| No | Vertical | Longitudinal | Lateral | Pitch | Yaw | Roll |
| 1 | 528.0477209 | 215,246.3 | 215,246.3 | 229,930.7 | - | 110,809.63 |
| 2 | 2922.76 | 215,246.3 | 215,246.3 | 229,930.7 | - | 110,809.63 |
| 3 | 26,913.48 | 39,645.25 | 39,645.25 | 37,349.03 | 35,797.46 | 39,331.24 |
| 4 | 2911.03 | 50,185.8 | 50,185.8 | 45,937.64 | 49,663.82 | 55,609.32 |
| 5 | 2922.05 | 9708.06 | 9708.06 | 7891.6 | 7482.27 | 14,725.25 |
| 6 | 2915.309 | 15,763.83 | 15,763.83 | 17,191.68 | 13,502.57 | 7291.54 |
| 7 | 2918.39 | 56,005.47 | 56,005.47 | 38,043.6 | 40,718.09 | 146,270.99 |
| 8 | 2911.91 | - | - | - | - | - |
| 9 | 2921.28 | 13,227.64 | 13,227.64 | 11,008.51 | 10,148.6 | 18,925.54 |
| 10 | 2920.09 | 25,488.29 | 25,488.29 | 28,657.46 | 23,560.66 | 8027.51 |
| Typical Platform Movements | ||||||
|---|---|---|---|---|---|---|
| No | Vertical | Longitudinal | Lateral | Pitch | Yaw | Roll |
| 1 | 1398.272 | 65,402.05 | 65,402.05 | 60,881.23 | 0 | 38,692.51432 |
| 2 | 1398.272 | 65,402.05 | 65,402.05 | 60,881.23 | 0 | 38,692.51432 |
| 3 | 1389.804 | 16,680.74 | 16,680.74 | 15,222.49 | 19,062.21 | 16,061.29617 |
| 4 | 1387.645 | 20,962.21 | 20,962.21 | 18,788.36 | 25,937.13 | 21,784.07242 |
| 5 | 1396.642 | 3483.912 | 3483.912 | 2679.171 | 3042.115 | 5419.357397 |
| 6 | 1391.116 | 5942.986 | 5942.986 | 6412.494 | 6532.407 | 2506.663968 |
| 7 | 1394.234 | 21,047.49 | 21,047.49 | 14,520.02 | 21,821.75 | 38,185.18225 |
| 8 | 1388.601 | 0 | 0 | 0 | 0 | 0 |
| 9 | 1396.331 | 5042.327 | 5042.327 | 3902.939 | 4578.547 | 7269.384542 |
| 10 | 1395.657 | 10,219.02 | 10,219.02 | 11,438.46 | 12,393.76 | 2817.450833 |
| Typical Platform Movements | ||||||
|---|---|---|---|---|---|---|
| No | Vertical | Longitudinal | Lateral | Pitch | Yaw | Roll |
| 1 | 0.277199 | 0.354188 | 0.373028 | 0.373073 | 0 | 0.222893066 |
| 2 | 0.277199 | 0.354188 | 0.373028 | 0.373073 | 0 | 0.222893066 |
| 3 | 0.276564 | 0.202464 | 0.192726 | 0.177762 | 0.068666 | 0.202065984 |
| 4 | 0.276405 | 0.203079 | 0.203079 | 0.197338 | 0.087215 | 0.202128609 |
| 5 | 0.277 | 0.098859 | 0.080875 | 0.054904 | 0.009659 | 0.159716237 |
| 6 | 0.276636 | 0.113755 | 0.113755 | 0.120003 | 0.018689 | 0.072813739 |
| 7 | 0.276894 | 0.207743 | 0.195081 | 0.159134 | 0.077596 | 0.398102111 |
| 8 | 0.276489 | 0 | 0 | 0 | 0 | 0 |
| 9 | 0.277007 | 0.099436 | 0.099436 | 0.073949 | 0.013535 | 0.174604933 |
| 10 | 0.27699 | 0.144958 | 0.144958 | 0.160646 | 0.04601 | 0.058034849 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duyun, T.; Duyun, I.; Kabalyants, P.; Rybak, L. Optimization of a 6-DOF Platform for Simulators Based on an Analysis of Structural and Force Parameters. Machines 2023, 11, 814. https://doi.org/10.3390/machines11080814
Duyun T, Duyun I, Kabalyants P, Rybak L. Optimization of a 6-DOF Platform for Simulators Based on an Analysis of Structural and Force Parameters. Machines. 2023; 11(8):814. https://doi.org/10.3390/machines11080814
Chicago/Turabian StyleDuyun, Tatiana, Ivan Duyun, Petr Kabalyants, and Larisa Rybak. 2023. "Optimization of a 6-DOF Platform for Simulators Based on an Analysis of Structural and Force Parameters" Machines 11, no. 8: 814. https://doi.org/10.3390/machines11080814
APA StyleDuyun, T., Duyun, I., Kabalyants, P., & Rybak, L. (2023). Optimization of a 6-DOF Platform for Simulators Based on an Analysis of Structural and Force Parameters. Machines, 11(8), 814. https://doi.org/10.3390/machines11080814