
Research on Lane-Change Decision and Planning in Multilane Expressway Scenarios for Autonomous Vehicles


Abstract
:1. Introduction
2. Considering the Driving Decisions for Multiple Lanes
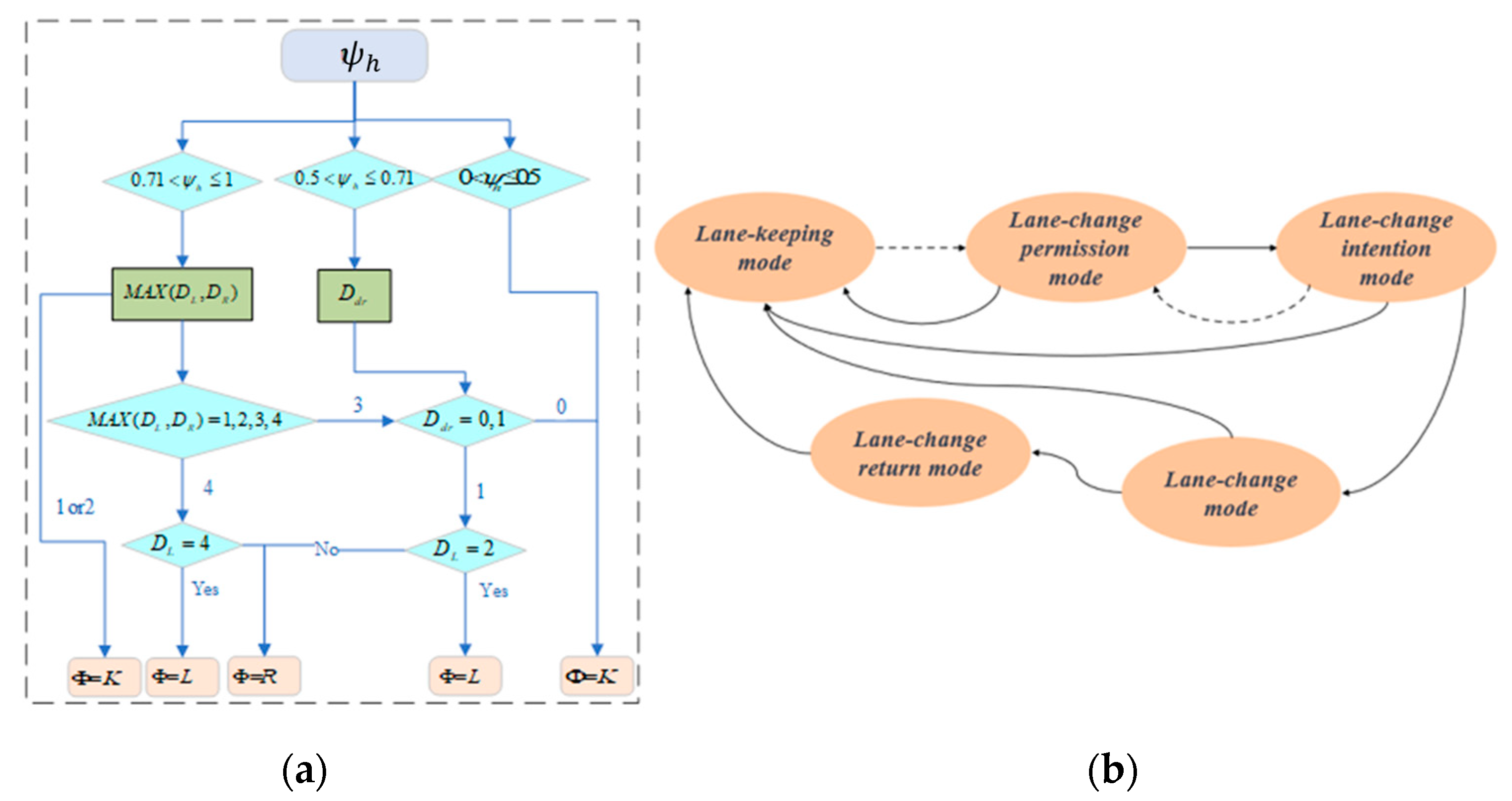
2.1. Willingness to Change Lanes Based on Fuzzy Theory
2.2. Adjacent Lane Safety Posture Determination
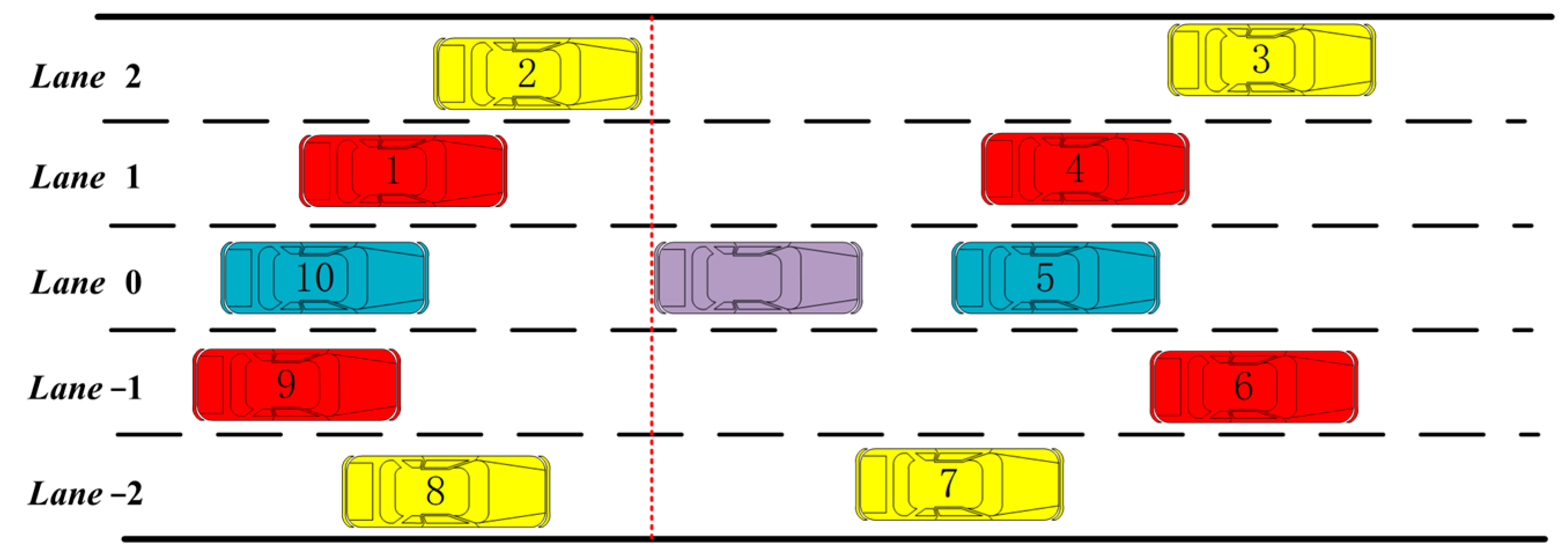
2.2.1. Classification of Surrounding Vehicles
2.2.2. Division of Surrounding Vehicle Behavior
2.2.3. Division of Surrounding Vehicle Behavior and External Factors
- There needs to be more space in the adjacent lane for the self-driving car to change lanes;
- There is sufficient space in the adjacent lane to make a lane change and no vehicles in the second to adjacent lane need to be considered for lateral movement;
- There is sufficient space in the adjacent lane for a lane change and the vehicle in front of the vehicle in the second to adjacent lane needs to consider lateral movements;
- There is sufficient space in the adjacent lane for a lane change and the vehicle behind the vehicle in the second to adjacent lane needs to be considered for lateral movement;
- There is sufficient space in the adjacent lane for a lane change and the vehicles in front of and behind the vehicle in the second to adjacent lane need to be considered for lateral movement.
- If there is no space for a lane change in the adjacent lane on the left, the safety level of the target lane is recorded as 1;
- If there is space to change lanes in the adjacent lane on the left and an associated vehicle is changing lanes into the target lane, the safety level of the target lane is recorded as 2;
- If there is space for a lane change in the adjacent lane on the left and the associated vehicle is in a lane departure, the safety level of the target lane is recorded as 3;
- If there is space to change lanes in the adjacent lane on the left and there is no associated vehicle in a lane departure, the safety level of the target lane is recorded as 4;
3. Intelligent Vehicle Trajectory Planning and Control
3.1. Intelligent Lane-Change Trajectory Planning
3.1.1. Equally Spaced Sampling
3.1.2. Boundary Conditions
3.1.3. Cost Function and Its Optimal Solution
3.2. Stability-Based Trajectory Tracking Control
3.2.1. Vehicle Dynamics Model
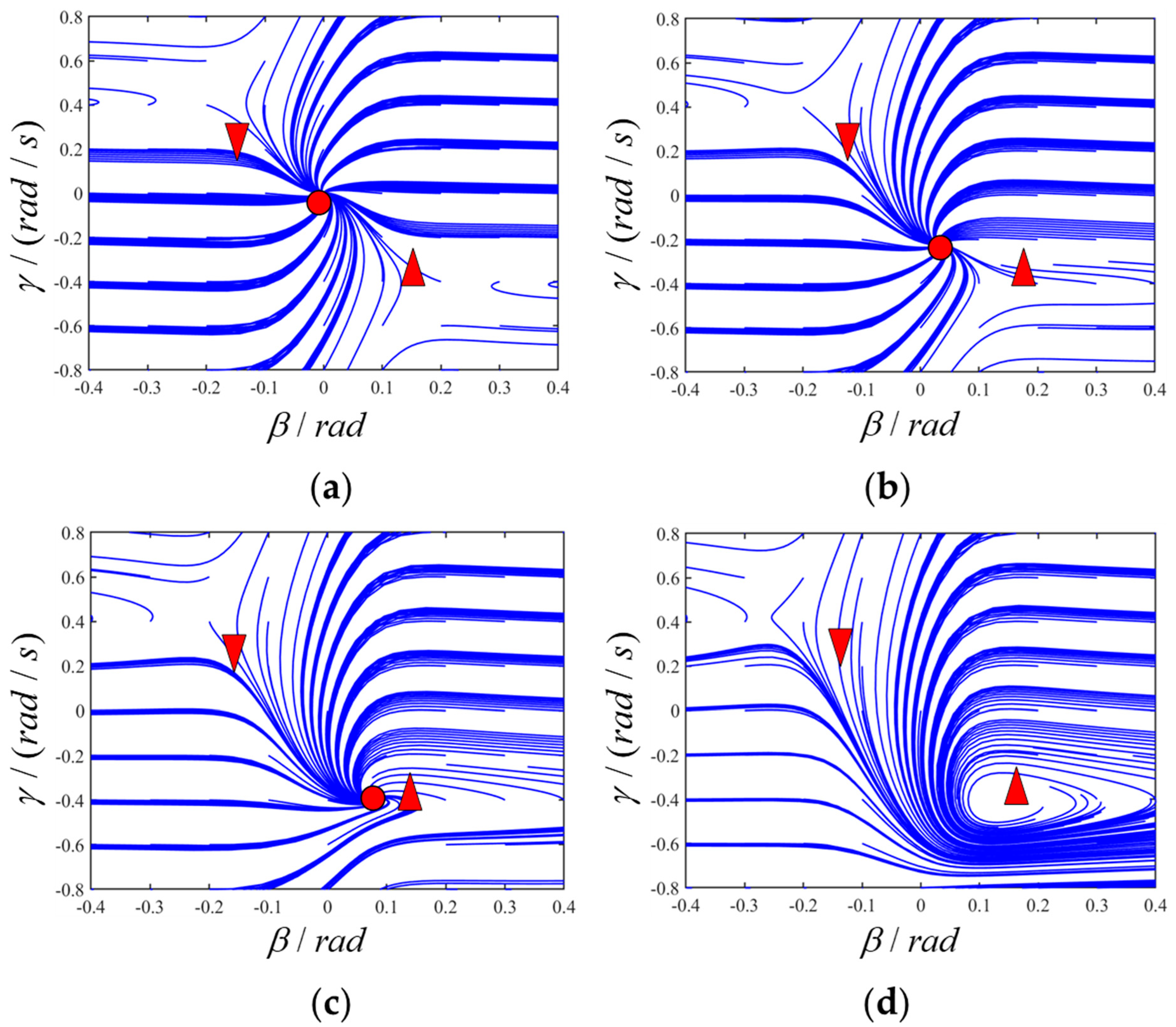
3.2.2. Vehicle Stability Constraints
- Vehicle Lateral Stability Constraint
- 2.
- Vehicle Lateral Stability Constraint
3.3. Model Predictive Controller Design
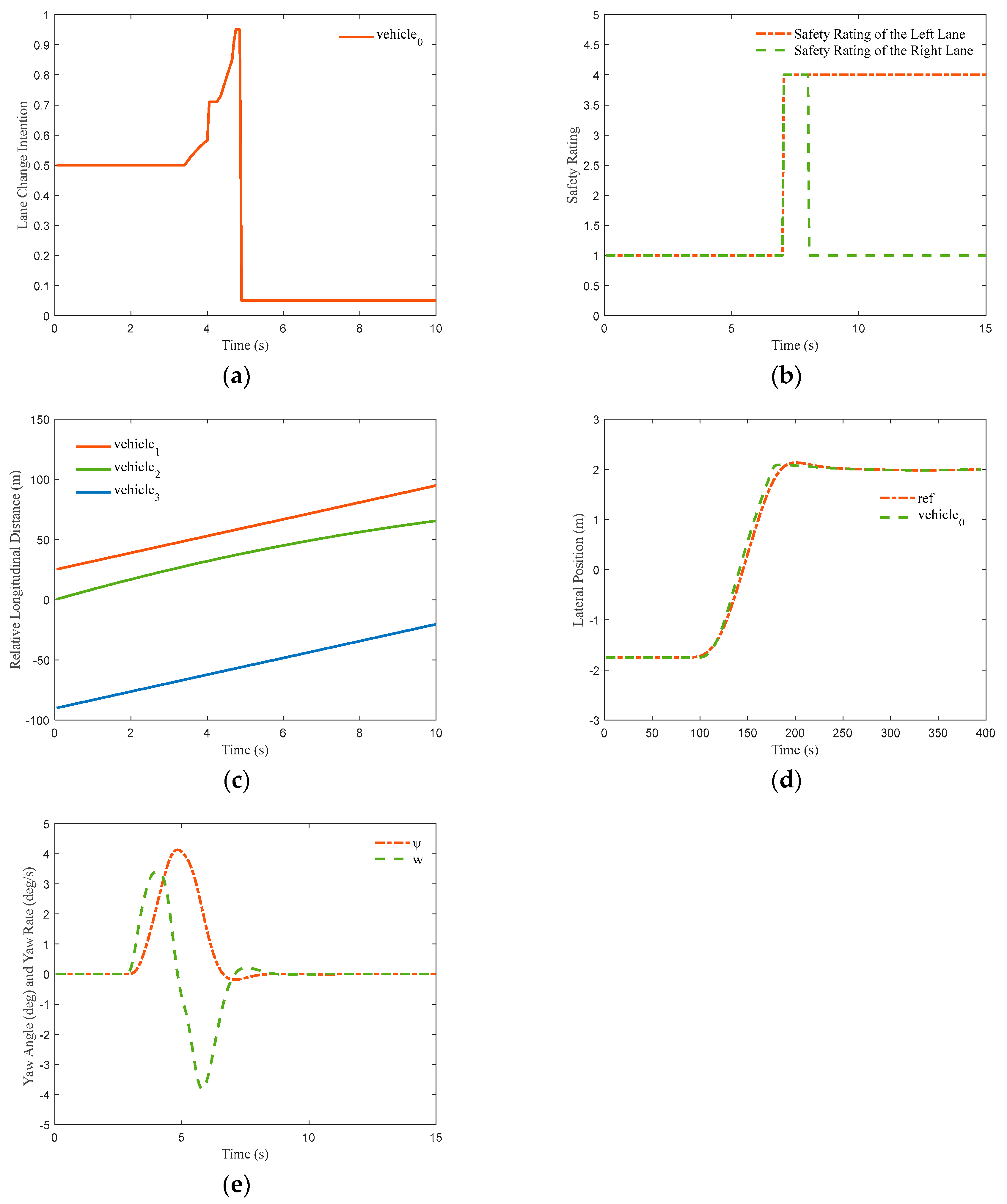
4. Simulation Experiments
4.1. Follow the Driving Conditions
4.2. Constant Speed Lane-Change Conditions
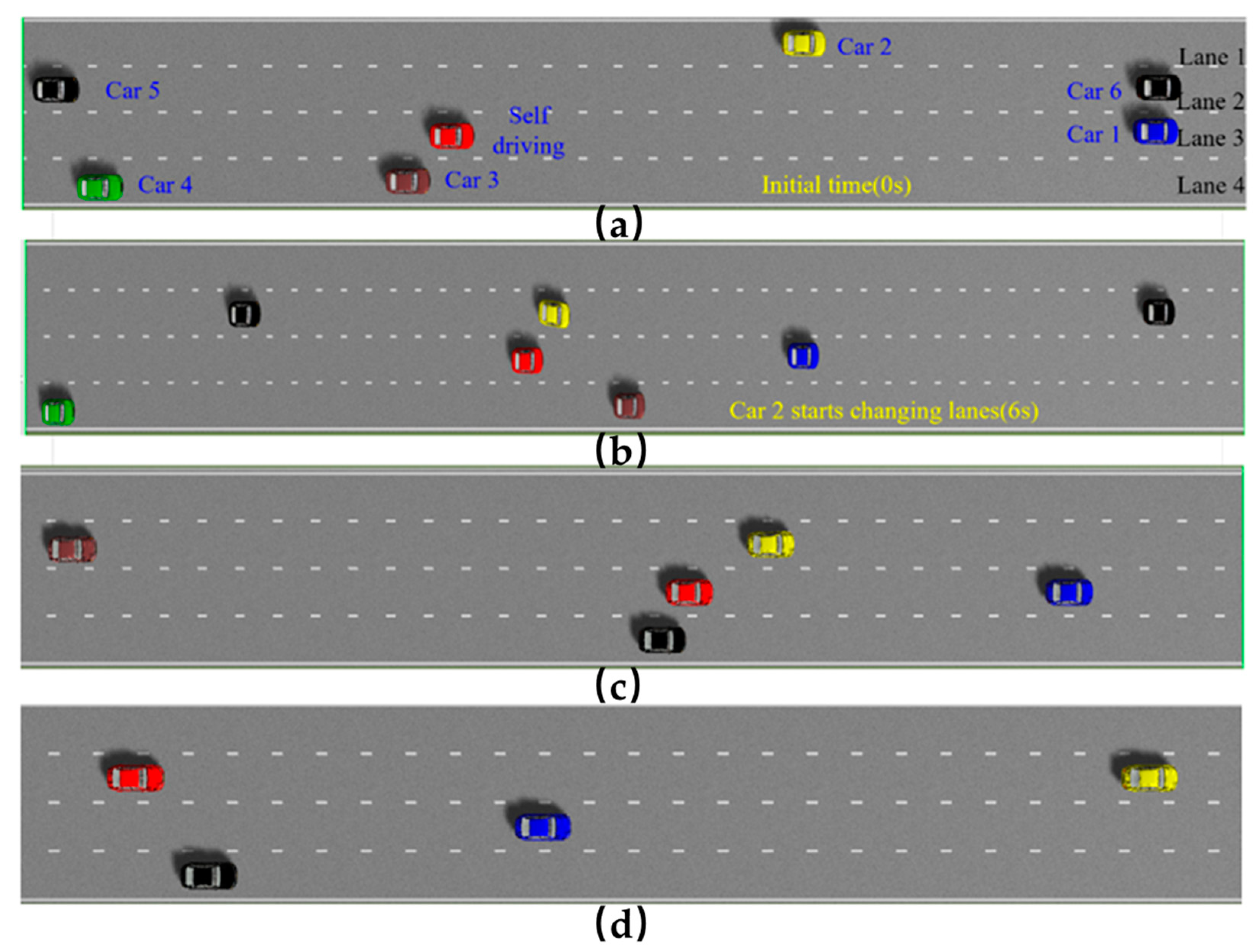
4.3. Simultaneous Lane-Change Conditions
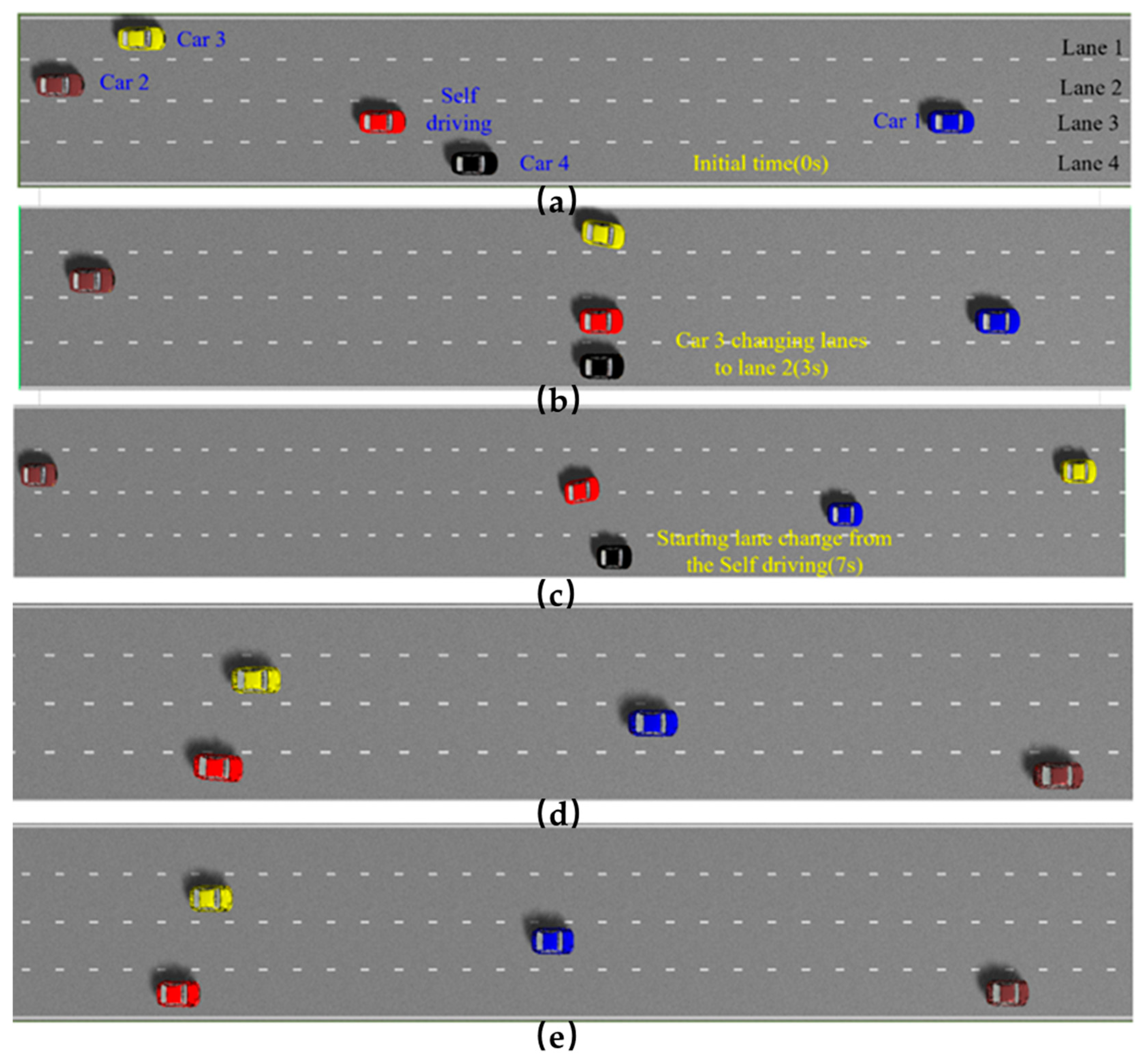
4.4. Slow Lane Change
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Corno, M.; Panzani, G.; Roselli, F.; Giorelli, M.; Azzolini, D.; Savaresi, S.M. An LPV Approach to Autonomous Vehicle Path Tracking in the Presence of Steering Actuation Nonlinearities. IEEE Trans. Control Syst. Technol. 2021, 29, 1766–1774. [Google Scholar] [CrossRef]
- Gutjahr, B.; Gröll, L.; Werling, M. Lateral Vehicle Trajectory Optimization Using Constrained Linear Time-Varying MPC. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1586–1595. [Google Scholar] [CrossRef]
- Nilsson, J.; Brännström, M.; Fredriksson, J.; Coelingh, E. Longitudinal and Lateral Control for Automated Yielding Maneuvers. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1404–1414. [Google Scholar] [CrossRef]
- Fan, H.; Zhu, F.; Liu, C.; Zhang, L.; Zhuang, L.; Li, D.; Zhu, W.; Hu, J.; Li, H.; Kong, Q. Baidu Apollo EM Motion Planner. arXiv 2018, arXiv:1807.08048. [Google Scholar]
- Mehdi, S.B.; Choe, R.; Hovakimyan, N. Avoiding multiple collisions through trajectory replanning using piecewise Bézier curves. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Zhu, B.; Yan, S.; Zhao, J.; Deng, W. Personalized Lane-Change Assistance System with Driver Behavior Identification. IEEE Trans. Veh. Technol. 2018, 67, 10293–10306. [Google Scholar] [CrossRef]
- Schnelle, S.; Wang, J.; Su, H.; Jagacinski, R. A Driver Steering Model with Personalized Desired Path Generation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 111–120. [Google Scholar] [CrossRef]
- Zhu, J.; Tasic, I.; Qu, X. Flow-level coordination of connected and autonomous vehicles in multilane freeway ramp merging areas. Multimodal Transp. 2022, 1, 100005. [Google Scholar] [CrossRef]
- Duan, X.; Sun, C.; Tian, D.; Zhou, J.; Cao, D. Cooperative Lane-Change Motion Planning for Connected and Automated Vehicle Platoons in Multi-Lane Scenarios. IEEE Trans. Intell. Transp. Syst. 2023, 24, 7073–7091. [Google Scholar] [CrossRef]
- Han, X.; Xu, R.; Xia, X.; Sathyan, A.; Guo, Y.; Bujanović, P.; Leslie, E.; Goli, M.; Ma, J. Strategic and tactical decision-making for cooperative vehicle platooning with organized behavior on multi-lane highways. Transp. Res. Part C Emerg. Technol. 2022, 145, 103952. [Google Scholar] [CrossRef]
- Balal, E.; Cheu, R.L.; Sarkodie-Gyan, T. A binary decision model for discretionary lane changing move based on fuzzy inference system. Transp. Res. Part C Emerg. Technol. 2016, 67, 47–61. [Google Scholar] [CrossRef]
- Yang, L.; Zhan, J.; Shang, W.-L.; Fang, S.; Wu, G.; Zhao, X. Multi-Lane Coordinated Control Strategy of Connected and Automated Vehicles for On-Ramp Merging Area Based on Cooperative Game. IEEE Trans. Intell. Transp. Syst. 2023, 1–14. [Google Scholar] [CrossRef]
- Lin, J.-Y.; Tsai, C.-C.; Nguyen, V.-L.; Hwang, R.-H. Coordinated Multi-Platooning Planning for Resolving Sudden Congestion on Multi-Lane Freeways. Appl. Sci. 2022, 12, 8622. [Google Scholar] [CrossRef]
- Coppola, A.; Lui, D.G.; Petrillo, A.; Santini, S. Cooperative driving of heterogeneous uncertain nonlinear connected and autonomous vehicles via distributed switching robust PID-like control. Inf. Sci. 2023, 625, 277–298. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, H.E.; Hrovat, D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. Control Syst. Technol. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Gu, Z.; Yin, Y.; Li, S.E.; Duan, J.; Zhang, F.; Zheng, S.; Yang, R. Integrated eco-driving automation of intelligent vehicles in multi-lane scenario via model-accelerated reinforcement learning. Transp. Res. Part C Emerg. Technol. 2022, 144, 103863. [Google Scholar] [CrossRef]
- Albarella, N.; Lui, D.G.; Petrillo, A.; Santini, S. A Hybrid Deep Reinforcement Learning and Optimal Control Architecture for Autonomous Highway Driving. Energies 2023, 16, 3490. [Google Scholar] [CrossRef]
- Ziegler, J.; Bender, P.; Dang, T.; Stiller, C. Trajectory planning for Bertha—A local, continuous method. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Asano, S.; Ishihara, S. Rule-Based Cooperative Lane Change Control to Avoid a Sudden Obstacle in a Multi-Lane Road. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–7. [Google Scholar] [CrossRef]
- You, F.; Zhang, R.; Lie, G.; Wang, H.; Wen, H.; Xu, J. Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Syst. Appl. 2015, 42, 5932–5946. [Google Scholar] [CrossRef]
- Amer, N.H.; Zamzuri, H.; Hudha, K.; Kadir, Z.A. Modelling and control strategies in path tracking control for autonomous ground vehicles: A review of state of the art and challenges. J. Intell. Robot. Syst. 2017, 86, 225–254. [Google Scholar] [CrossRef]
- Alcala, E.; Puig, V.; Quevedo, J.; Escobet, T.; Comasolivas, R. Autonomous vehicle control using a kinematic Lyapunov-based technique with LQR-LMI tuning. Control Eng. Pract. 2018, 73, 1–12. [Google Scholar] [CrossRef]
- Zadeh, A.G.; Fahim, A.; El-Gindy, M. Neural network and fuzzy logic applications to vehicle systems: Literature survey. Int. J. Veh. Des. 1997, 18, 132–193. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ψD | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| ψv | ||||||||
| NB | NS | NS | NM | NM | NB | NB | NB | |
| NM | NS | NS | NM | NM | NM | NB | NB | |
| NS | ZO | ZO | NS | NS | NS | NM | NM | |
| ZO | PM | PM | PS | PS | ZO | NS | NM | |
| PS | PM | PM | PS | PS | ZO | ZO | NS | |
| PM | PB | PB | PM | PM | PS | ZO | NS | |
| PB | PB | PB | PB | PM | PM | PS | PS | |
| Lane-Changing Willingness Value (ψh) | Vehicle Lane-Changing Decision |
|---|---|
| 0.71 < ψh ≤ 0.51 | no lane change |
| 0.51 < ψh ≤ 0.71 | waiting for lane change |
| 0.71 < ψh ≤ 1.00 | executing lane change |
| Factor | Correction Factor | The Range of Real Factor Value |
|---|---|---|
| Rain | qrain ∈ [0, 1, 2, 3] | 0~50 (mm/h) |
| Wind | qwind ∈ [0, 1, 2, 3] | 0~12 (Beaufort scale) |
| Fog | qfog ∈ [0, 1, 2, 3] | 0~6.2 (mile) |
| Road | qroad ∈ [0, 1, 2, 3] | Dry/Damp/Stagnant water/Snow and ice cover/Muddy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; Pan, L.; Xia, J.; Fan, S. Research on Lane-Change Decision and Planning in Multilane Expressway Scenarios for Autonomous Vehicles. Machines 2023, 11, 820. https://doi.org/10.3390/machines11080820
Tang C, Pan L, Xia J, Fan S. Research on Lane-Change Decision and Planning in Multilane Expressway Scenarios for Autonomous Vehicles. Machines. 2023; 11(8):820. https://doi.org/10.3390/machines11080820
Chicago/Turabian StyleTang, Chuanyin, Lv Pan, Jifeng Xia, and Shi Fan. 2023. "Research on Lane-Change Decision and Planning in Multilane Expressway Scenarios for Autonomous Vehicles" Machines 11, no. 8: 820. https://doi.org/10.3390/machines11080820
APA StyleTang, C., Pan, L., Xia, J., & Fan, S. (2023). Research on Lane-Change Decision and Planning in Multilane Expressway Scenarios for Autonomous Vehicles. Machines, 11(8), 820. https://doi.org/10.3390/machines11080820