1. Introduction
As indispensable general machinery for production and daily life, the positive displacement pump has numerous applications, such as chemical, food, pharmaceutical, metallurgy, domestic water supply, and more. However, due to increasingly stringent working requirements, it often needs to adapt to extreme working environments and transport specialized working media [
1,
2,
3]. In recent years, pump devices have developed towards broader and more efficient operational ranges, higher power density, and lighter weight [
4,
5,
6]. As global demands for energy-saving and emission reduction continue to increase, there is a growing need for exceptional new-principle positive displacement power machinery support.
Recent years have seen extensive research and innovation on positive displacement pumps, encompassing rotor profile design, pump structure, kinematic analysis, and flow field simulation. Wang et al. introduced an asymmetrical cycloid rotor for Roots pumps, enhancing design flexibility over traditional rotors [
7]. Wu et al. developed a mathematical model for multi-stage “IVEC” type Roots vacuum pump rotors, improving design flexibility and pump performance [
8]. Novel pump types like water hydraulic vane pumps, rotary clap pumps, positive displacement high-pressure vertical axis wind pumps, rotary distribution system plunger pumps, and Tritium Compatible Stainless Steel Roots Pumps have also emerged, addressing the drawbacks of traditional pumps [
9,
10,
11,
12,
13].
Meanwhile, Guerra et al. [
14] explored the design and performance of a balanced vane pump. They analyzed the kinematics of a double-lip vane pump, including its blade motion trajectory, velocity, and acceleration. At the same time, they also studied the geometric feasibility conditions of double-lip vane pumps, including lip spacing, lip length, and lip offset. Battarra et al. [
15] first explored the kinematics of the balanced vane pump, studied the relationship between the geometry of the blade and the pump’s performance, and proposed a new design method to improve the efficiency and performance of the pump. Moreover, some scholars use fluid dynamics simulation to predict and improve pump performance. Choudhuri et al. [
16] used CFD to simulate rotary positive displacement pump flow, studying the impact of tooth count on performance. Guo et al. [
17] analyzed Roots pump efficiency under gas–liquid mixing, proposing strategies to mitigate efficiency reduction caused by reflux. Wang et al. [
18] optimized electric submersible pump gap values for enhanced efficiency. Rong et al. [
19] used CFD to scrutinize centrifugal pump performance, demonstrating its superiority over empirical methods. Vyavahare et al. [
20] compared impeller velocity and pressure distribution using CFD and analytical predictions in a centrifugal pump. The methods of the above studies are of universal significance. However, in the application of machine learning and optimization techniques to pump design and performance prediction, Mao and others [
21] proposed a machine-learning-based approach to predict the output performance of flexible electrohydrodynamic (EHD) pumps, addressing the limitations of traditional physical simulations. Three machine learning algorithms, including random forest regression, ridge regression, and neural network, were utilized to forecast critical parameters (pressure, flow rate, and power) using input data such as voltage, angle, gap, overlap, and channel height. M. Bashiri and others [
22] have utilized improved artificial neural networks (ANN), evolutionary algorithms of particle swarm optimization (PSO), and validated CFD data to optimize the shape of centrifugal impellers, significantly enhancing the efficiency and head of centrifugal pumps.
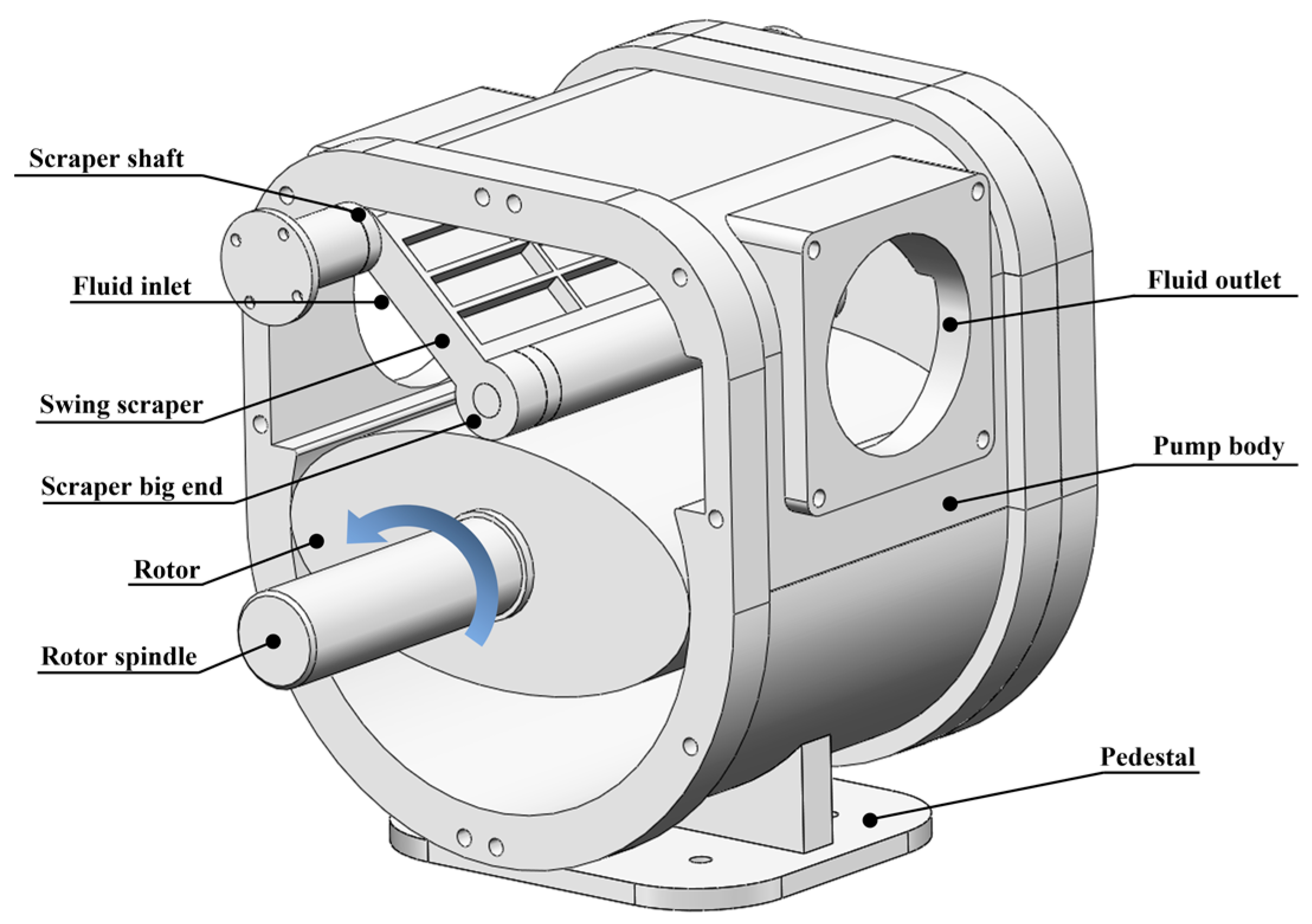
Based on the above research, Qingdao University proposed the structural principle of the scraper pump, and developed the ERSP, completed the study of the self-locking characteristics of the scraper, carried out motion simulation based on ADAMS, showing significant improvement in volumetric performance compared to the traditional Roots blower. However, due to its unique geometry, obtaining the displayed analytical equations between the ERSP swing scraper and the elliptical rotor is rugged, especially considering the oil film’s thickness or air gap during operation. However, many researchers have attempted to fit the relationship between the rotor trajectory and the swing scraper angle using the traditional polynomial regression method. However, this method has limited accuracy and does not accurately capture the coordinated motion relationship between the elliptical rotor and the swing scraper. Subsequently, it leads to adverse mesh volume problems when performing CFD simulations, which directly affects the continuity of numerical calculations and fundamentally hinders the implementation of simulations; on the other hand, the traditional polynomial regression method requires more data points to ensure the accuracy of the motion, which increases the computational effort.
Based on the above deficiencies, according to the cooperative motion relationship between the ERSP swing scraper and the elliptical rotor and taking into account the actual working clearance between the swing scraper and the elliptical rotor, the three methods of Exhaustive Search Method, sequential quadratic programming method, and BFGS-BM Method were tried and compared. Then, a high-precision explicit description of the motion trajectory and parameters of the swing scraper was obtained based on the proposed BFGS-BM Method. Finally, the flow field simulation and prototype experiment of ERSP were realized based on this method. The focus of this study was to provide an accurate equation of motion method for solving high-precision small-gap simulations, which is geometrically significant and provides a practical and effective solution for the simulation of complex fluid machinery such as ERSP.
3. Optimization Method for the Motion Trajectory
Based on the preceding theoretical analysis and mathematical derivation, it was determined that numerical fitting and polynomial fitting should be employed to tackle the issues regarding the dynamic motion trajectory and equations of the elliptical rotor and swing scraper. This section introduces or proposes three methods for determining the motion trajectory and equations.
3.1. Exhaustive Search Method
For solving this problem, the most widely used method is the ergodic search method. Before embarking on an exhaustive search for solutions, it is necessary to initially define the range of values for the independent variables in the motion equation: the rotational angle (θ) of the elliptical rotor and the oscillating angle (α) of the swing scraper. Subsequently, a compromise is made to set the computational step size for θ as ten and for α as 0.01 in the exhaustive search method to balance computational accuracy and efficiency.
In this paper, in order to avoid encountering spurious intersections between the scraper circle and the elliptical rotor surface during the exhaustive search process, this study traversed all the points on the trajectory of the scraper head’s motion. It calculated the corresponding α value for each point. Additionally, due to the absence of direct contact between the elliptical rotor and the scraper circle, with gaps typically ranging from 0.02 mm to 0.04 mm, a constraint of 0.02 ≤ dij − r ≤ 0.04 was imposed during the solving process, where r denotes the radius of the scraper circle. The calculation results that did not satisfy this constraint and were, thus, are discarded. Finally, the least squares method performed polynomial fitting on all α and θ data that met the constraint criteria obtained from the exhaustive search method.
For the traditional exhaustive search method, to constrain the magnitude of the fluctuation of dij, it can only try to minimize the solution step size of the variables θ and α. Therefore, this method’s convergence speed and efficiency may be limited when dealing with complex problems. In the subsequent discussion, a more efficient adjustment to the variable step size was achieved by introducing a theoretically superior sequential quadratic programming algorithm. This method can effectively reduce the magnitude of fluctuations in the computation, which improves the convergence performance of the algorithm and enables the algorithm to obtain a stable solution in a shorter time.
3.2. Sequential Quadratic Programming (SQP) Algorithm
The gap between the elliptical rotor and the swing scraper should remain stable and within a reasonable range, and, hence, controlling this gap is of utmost importance. In the case of the Sequential Quadratic Programming algorithm’s case, to constrain the fluctuation amplitude of the gap
dij obtained through computations, it is first perceived as an optimization problem. The objective function of this problem is defined as:
Herein,
dmin = min{
dij} signifies the minimum distance from the swing scraper’s larger end center to the elliptical rotor’s surface. In comparison,
dmax = max{
dij} denotes the maximum distance from the swing scraper’s larger end center to the elliptical rotor’s surface. The values of
dij are derived from the exhaustive search method presented in the preceding section.
Compared with the exhaustive search method, the Sequential Quadratic Programming algorithm strategically determines the values for the rotational angle θ of the elliptical rotor and the swing angle α of the swing scraper. The problem-solving idea is to first simplify the objective function of the optimization problem into a quadratic programming problem based on the Taylor expansion series and the constraints into linear functions at each iteration point. Subsequently, the optimal solution obtained from solving the quadratic programming problem at each step is used as the search direction for the next step. This process is repeated until the optimal solution to the original problem is found.
However, theoretically, the SQP algorithm needs to solve multiple quadratic programming subproblems at each iteration step, which makes it difficult to fully utilize the sparsity and symmetry of the original optimization problem, resulting in a large amount of computation and data storage. The calculation efficiency is not ideal. The optimization problem described in this section takes 11,817.5 s to converge. To further compress the solution time of the optimization problem shown in Equation (10) while ensuring the accuracy of the gap control, the following combines the BFGS method and the BM method to propose a theoretically more efficient solution method, which is henceforth referred to as the BM-BFGS method for convenience.
3.3. BFGS-BM Method
The Broyden–Fletcher–Goldfarb–Shanno (BFGS) method is one of the most efficient techniques for solving non-linear, unconstrained optimization problems. This approach negates the need to compute the Hessian matrix of the optimization problem, instead constructing an approximation of a positive-definite symmetric matrix based on the BFGS conditions. Consequently, it has a convergence speed closely resembling the Newton method and significantly reduces the computational requirements compared to the latter. However, because the BFGS method is inherently designed for unconstrained optimization problems, it is unsuitable for the constrained optimization problem denoted as Equation (10) in this paper. Hence, this study combines the penalty function and the BFGS methods to solve Equation (2). The process of the BFGS-BM method is illustrated in
Figure 4. The strategy adopted involves treating the constraints as penalty terms in the objective function and introducing a comparatively large penalty coefficient,
M. This allows the constrained problems illustrated by Equations (10) and (11) to be transformed into unconstrained optimization problems, as demonstrated below:
4. Simulation Results and Comparative Analysis
Numerical simulations and polynomial fitting processes were carried out based on the exhaustive search method, the SQP algorithm, and the BFGS-BM method proposed in
Section 3, all attempting to control the gap between the elliptical rotor and the swing scraper. This section presents a comparative analysis of the simulation results for these three methods.
The simulation involves utilizing the exhaustive search method to acquire relevant data and perform the fitting.
Figure 5 illustrates the relationship between the elliptical rotor’s rotational angle (
θ) and the swing scraper’s swinging angle (
α) under three search methods.
Figure 5a represents the exhaustive search method, with the rotor angle (
θ) reaching a limit of 79.58° and the scraper achieving an oscillation of 36.845°.
Figure 5b displays the relationship under the sequential quadratic programming algorithm, with the rotor angle (
θ) reaching a limit of 79.25° and the scraper oscillating at 37.765°. Finally,
Figure 5c describes the relationship under the BFGS-BM method, with the rotor angle (
θ) reaching a limit of 79.35° and the scraper oscillating at 36.74°.
Figure 5d shows the operation of the oscillating scraper with the rotor for the first three cycles solved by Adams simulation software. In one cycle, the maximum swing range of the scraper was 36.74°. Considering the influence of the gap width between the two, the maximum angle obtained by the simulation was the same as that obtained by the BFGS-BM solution, which verifies the correctness of the solution method.
Figure 6 illustrates the relationship between cycle count and gap width under three search methods. Within controllable computational constraints, the exhaustive search method utilized a larger variable step size to establish the potential correlation between the elliptical rotor’s rotational angle and the swing scraper’s angular position relative to the x-axis. However, due to the larger step size, limited precision led to significant fluctuations in calculated gap values (
dij). The maximum gap reached 0.039 mm, deviating from the actual gap. During the simulation of the sequential quadratic programming algorithm, the oscillation range of the gap between the elliptical rotor and the swing scraper was 0.025 mm to 0.0321 mm, with a fluctuation amplitude of 0.0071 mm and a fluctuation coefficient of 0.24 significantly smaller than the 0.019 mm obtained from the exhaustive search method. This confirmed the higher precision of the sequential quadratic programming algorithm in solving the problem, as the gap width stabilized within a more suitable range for the design requirements of the elliptical rotor scraper pump. For the solution obtained under the BFGS-BM method, the oscillation range of the gap between the elliptical rotor and the swing scraper was 0.025 mm to 0.0331 mm, with a fluctuation amplitude of 0.0081 mm and a fluctuation rate of 0.31. This amplitude was smaller than that obtained through the exhaustive search method, affirming the feasibility of the BFGS-BM method.
According to the solution results and comparative analysis of the exhaustive search method, sequential quadratic programming method, and BFGS-BM method, the solution speed of the exhaustive search method is the fastest, the BFGS-BM method is the second fastest, and the solution speed of the sequential quadratic programming method is the slowest. This chapter uses the variation range of the gap between the elliptical rotor and the swing scraper (
dmax −
dmin) as the robustness evaluation index. In terms of the robustness of the calculation results, the sequential quadratic programming method is the most robust, the BFGS-BM method is the second, and the exhaustive search method is the worst. Compared with the traditional algorithm, the BFGS-BM method improves the computational efficiency by 29.25% and reduces the gap fluctuation rate by 42.63%. Combining computational efficiency and accuracy, this paper controls the mesh motion in the computational domain model through the BFGS-BM solving results to realize the numerical simulation.
Table 2 compares the computation time and robustness of the three methods.
According to the BFGS-BM method, multiple pairs of scraper swing Angle and ellipse rotation Angle are obtained, and the least square method is used to fit, and the fitting equation of Angle
α is obtained:
Among them: a1 = 29.32, b1 = 0.00191, c1 = 1.881, a2 = 18.09, b2 = 0.03609, c2 = 1.809, a3 = 2.291, b3 = 0.7812, c3 = −1.176, a4 = 0.2511, b4 = 0.2511, c4 = −0.5408.
Based on the above analysis, by deriving the time of the elliptical rotor rotation angle equation, the relationship between the rotation speed of the elliptical rotor and the scraper angular speed can be obtained, as follows:
where
a1,
b1,
c1,
a2,
b2,
c2,
a3,
b3,
c3,
a4,
b4, and
c4 can be obtained from Equation (13),
ω1 is the angular speed of the swing scraper, and
ω2 is the angular speed of the elliptical rotor.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}