
Model Predictive Control of Humidity Deficit and Temperature in Winter Greenhouses: Subspace Weather-Based Modelling and Sampling Period Effects

Abstract
:1. Introduction
2. Experimental Environment
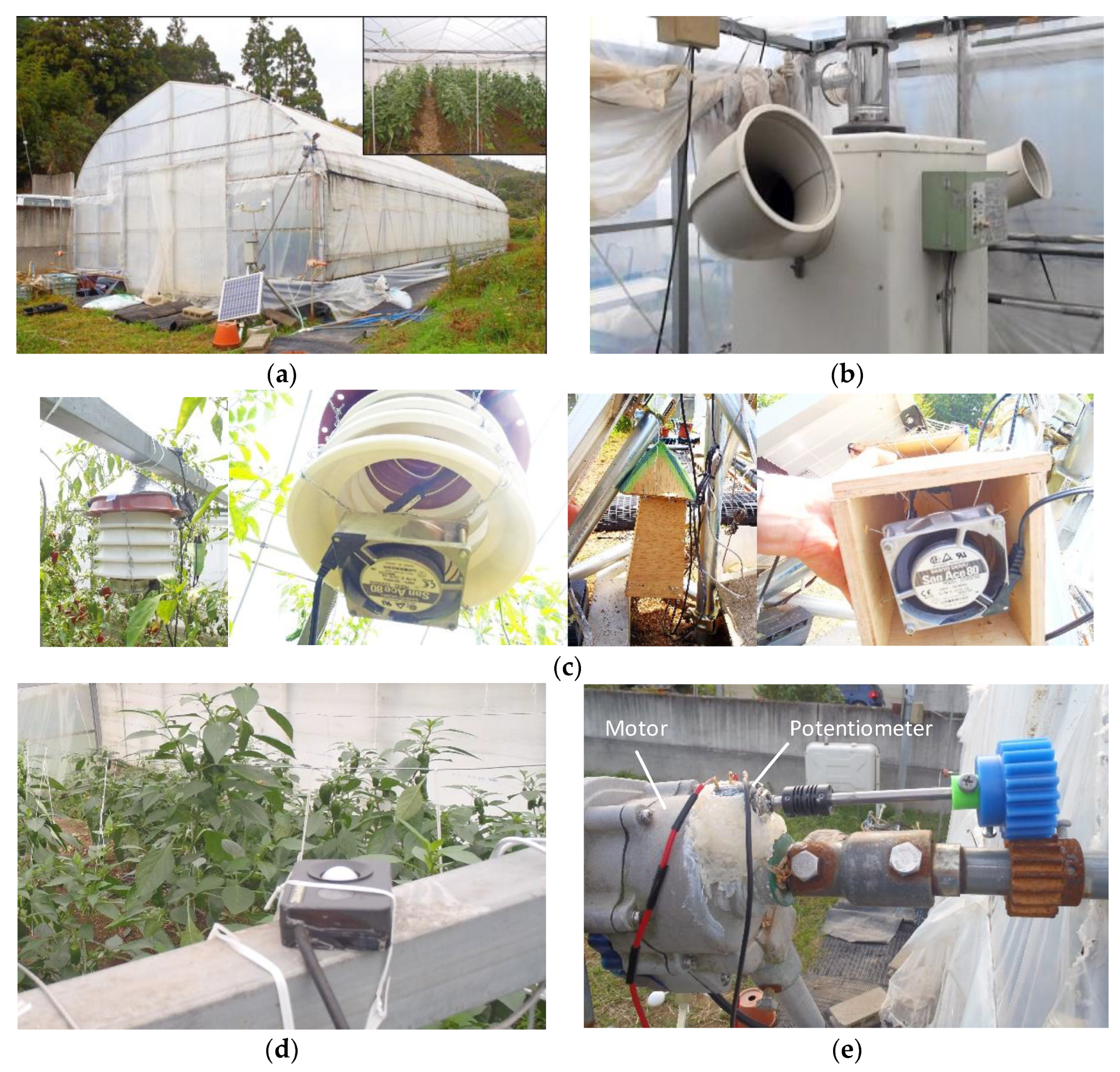
2.1. Overview of the Winter Greenhouse Measurement Environment
2.2. HD Calculation Formula
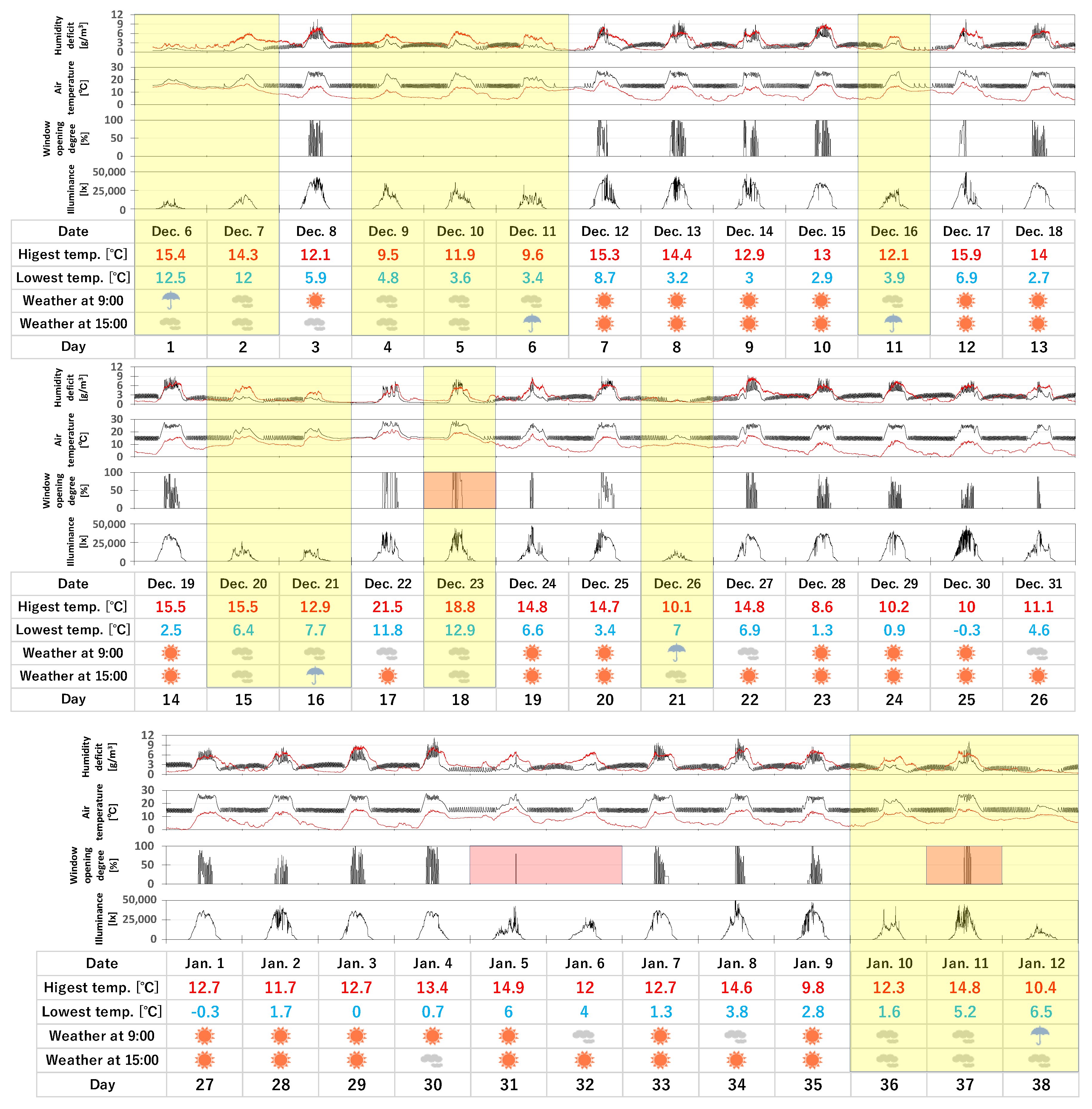
2.3. Environmental Measurement Data and Weather Information
3. Greenhouse HD and Air Temperature Model
3.1. Numerical Model Overview
3.2. Model Construction
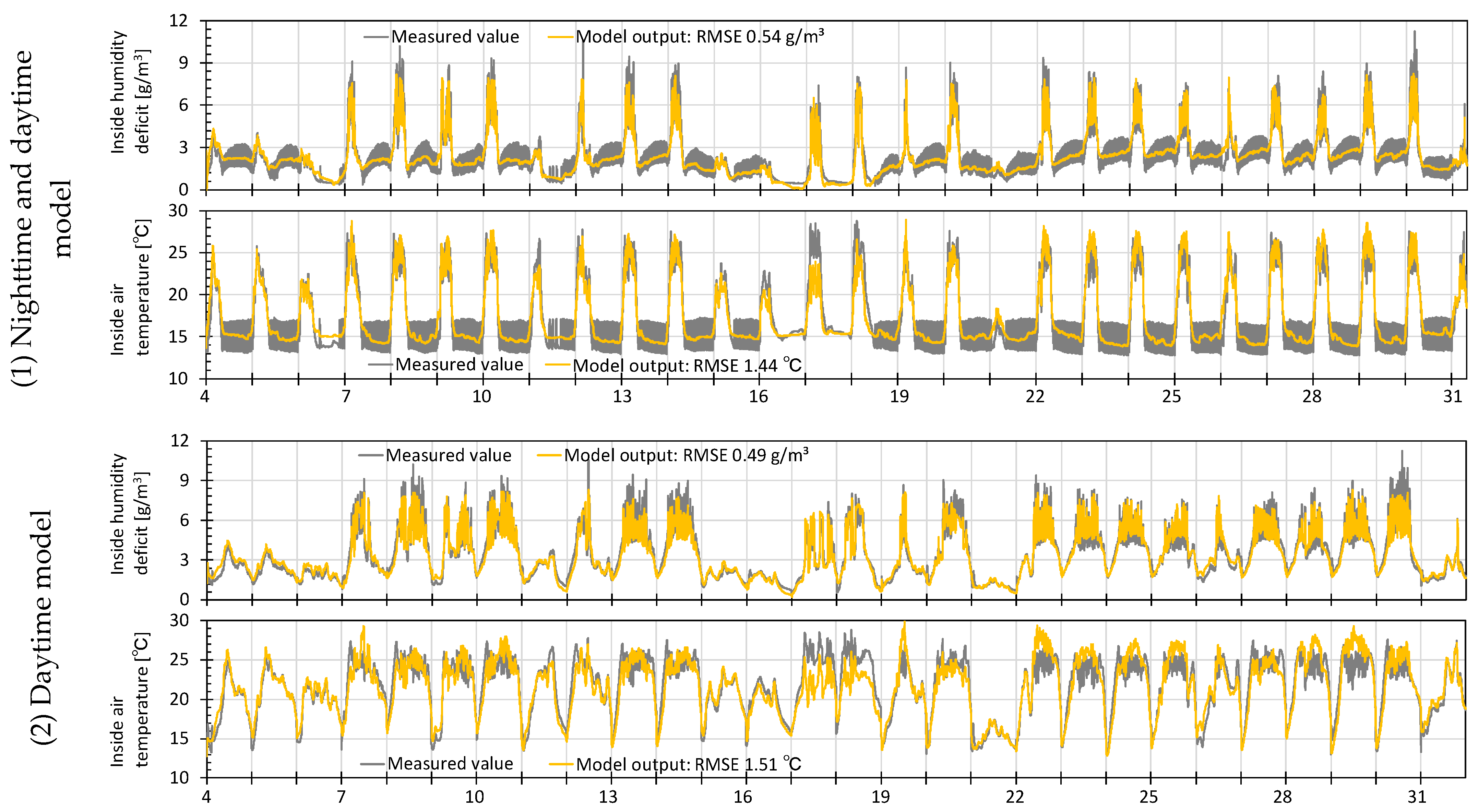
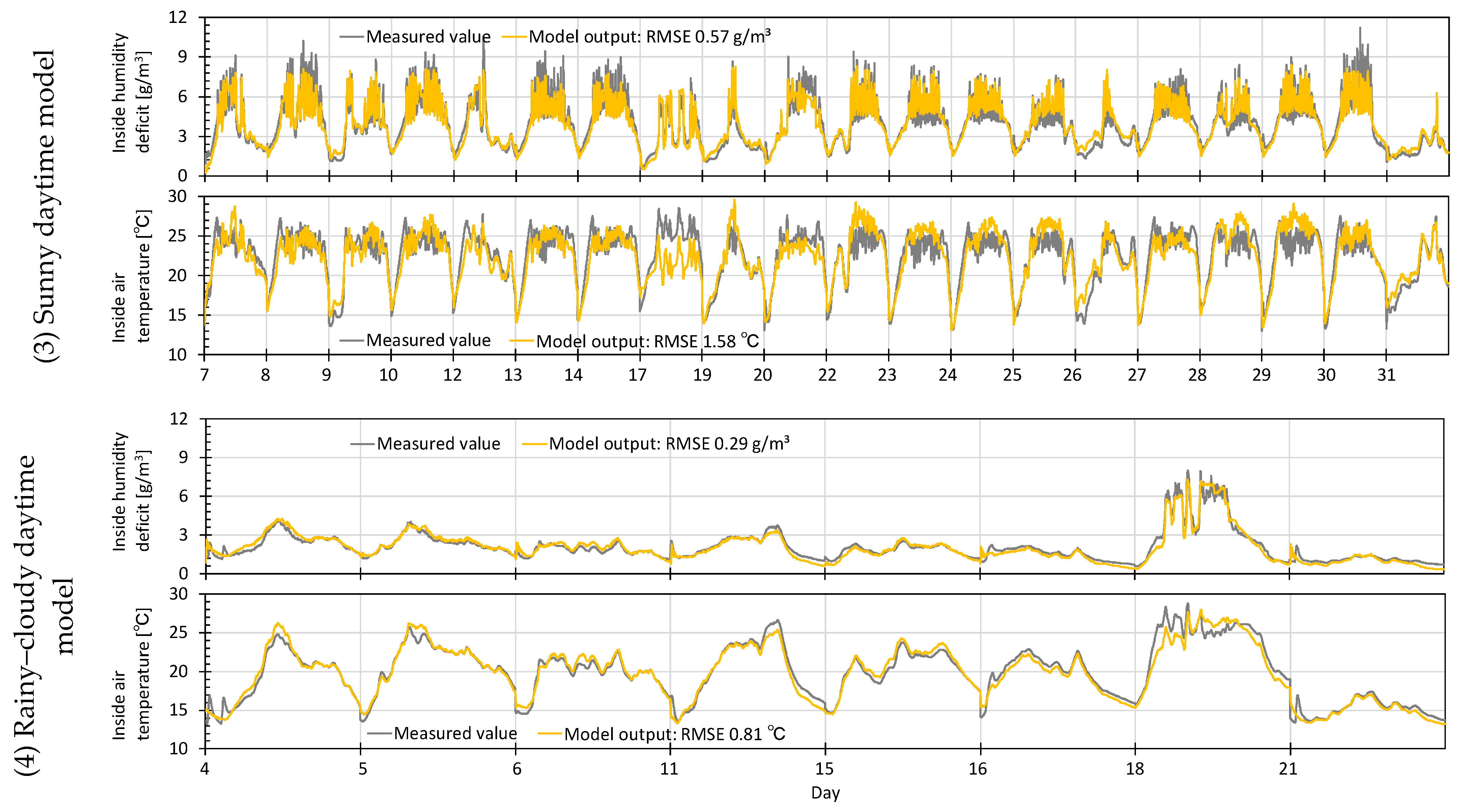
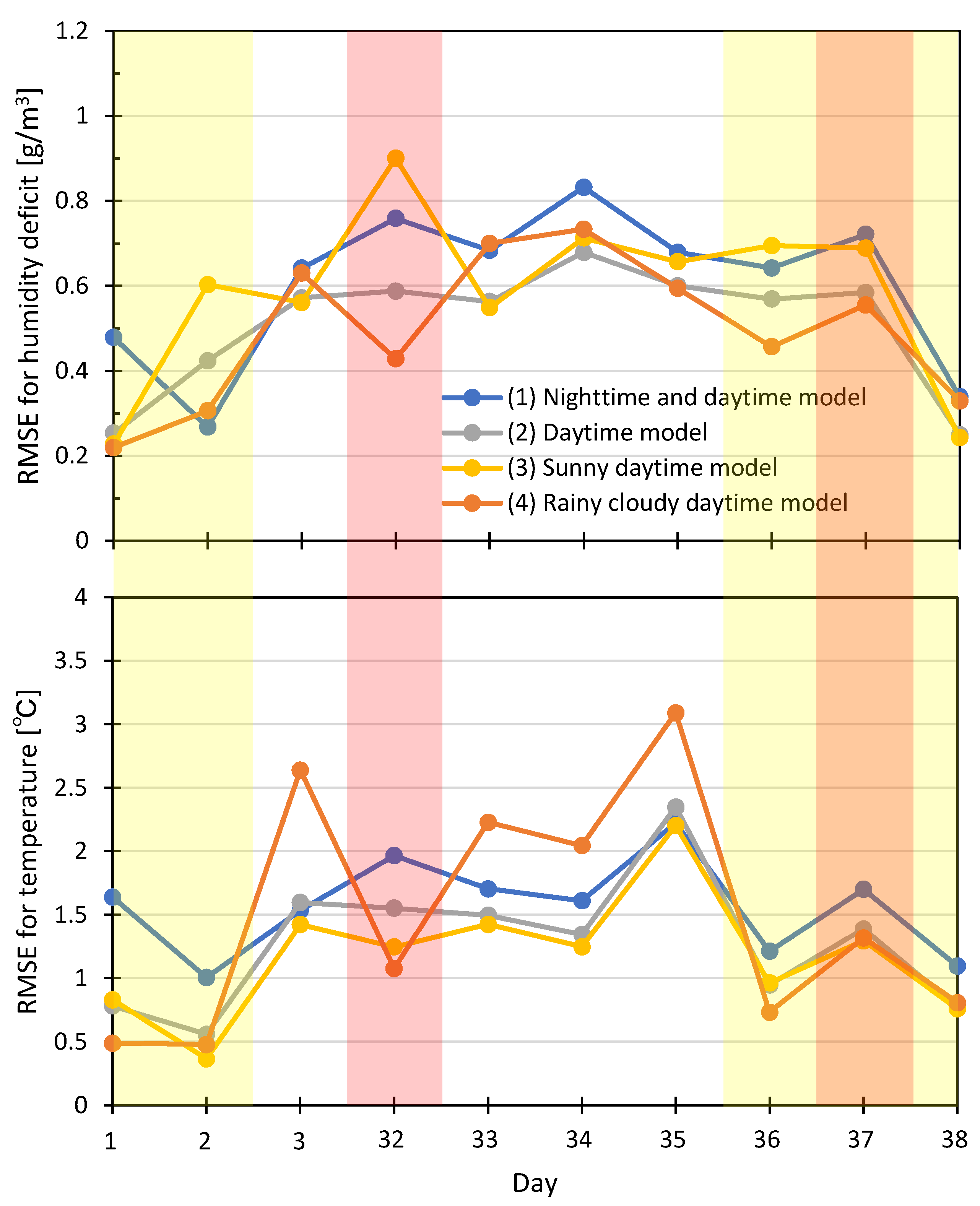
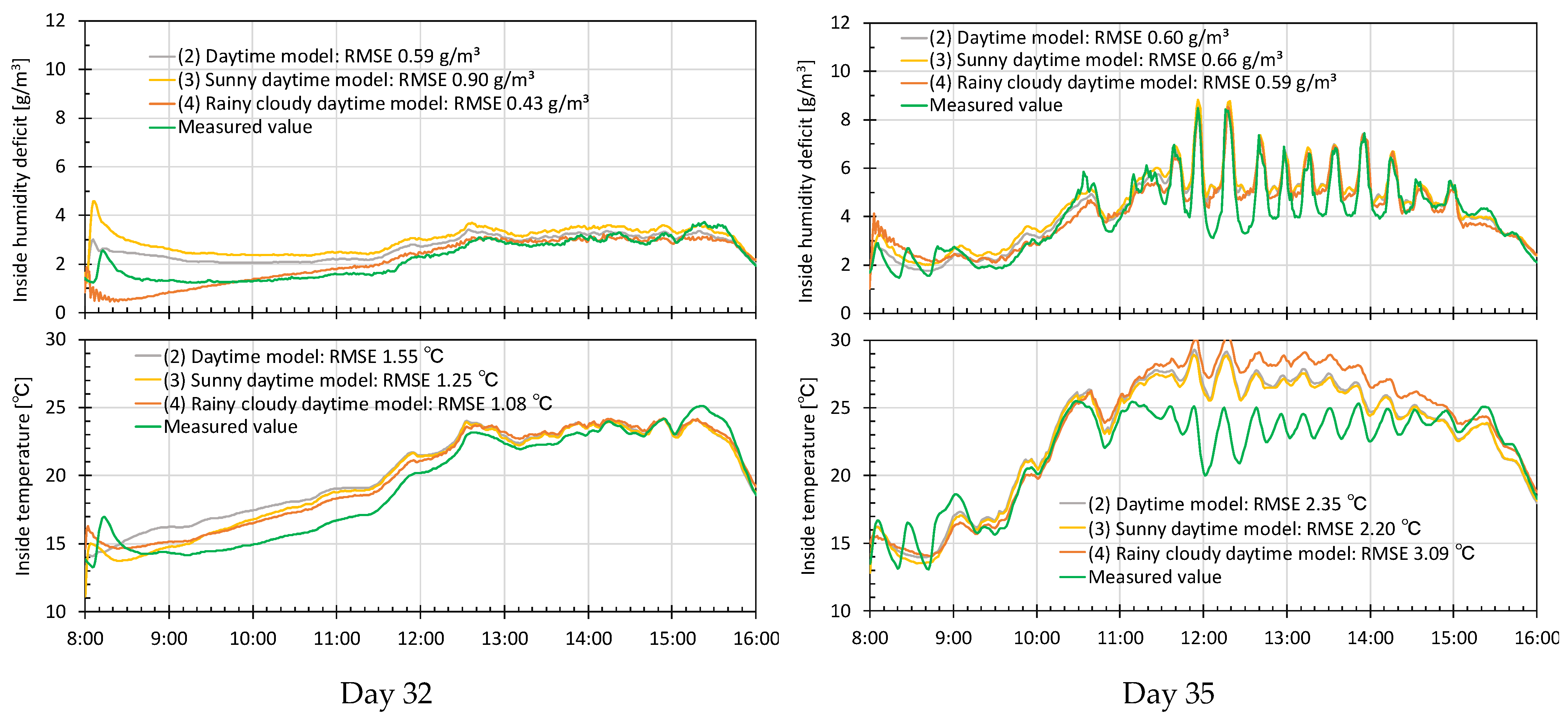
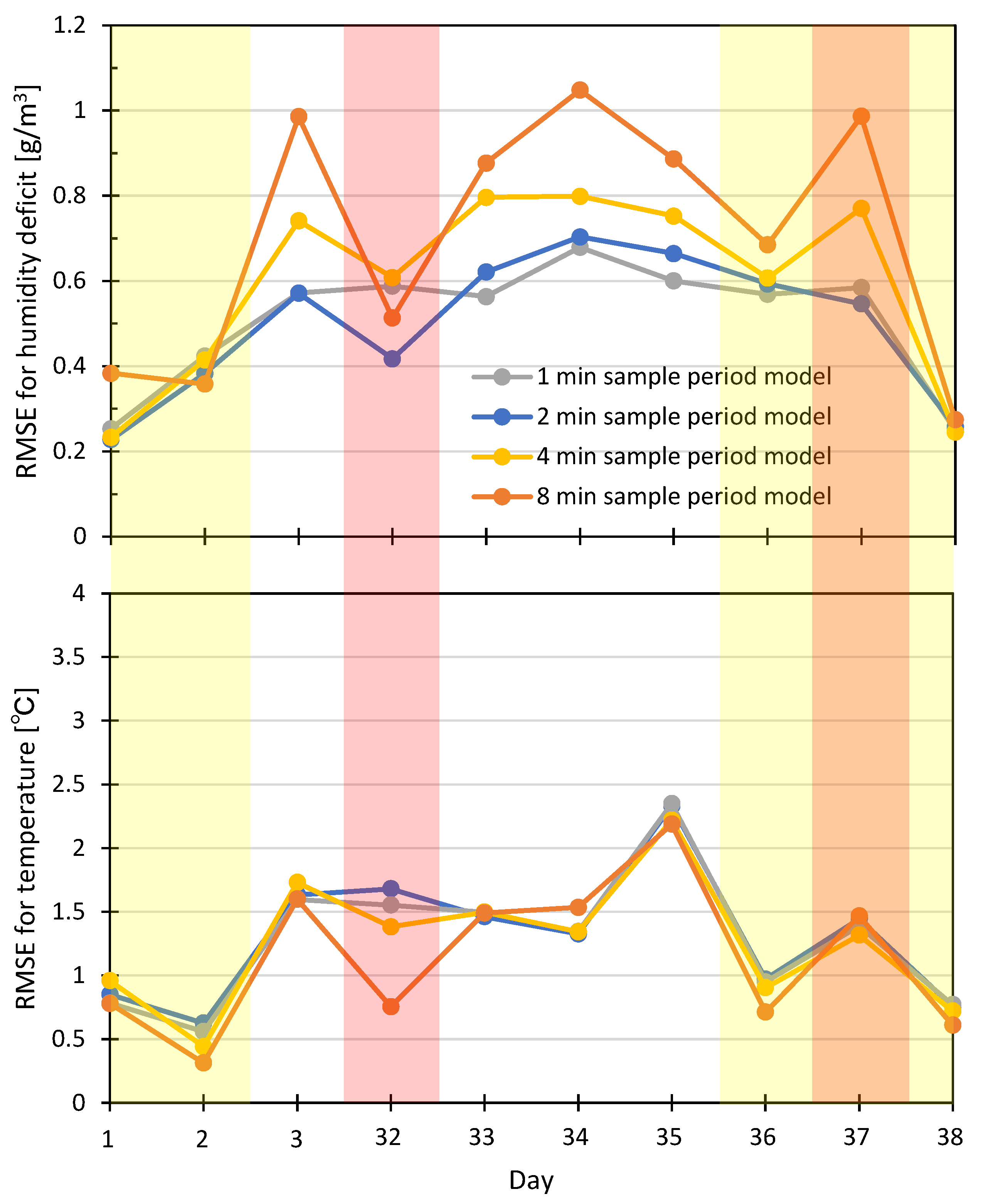
3.3. Model Evaluation
4. Model Predictive Control
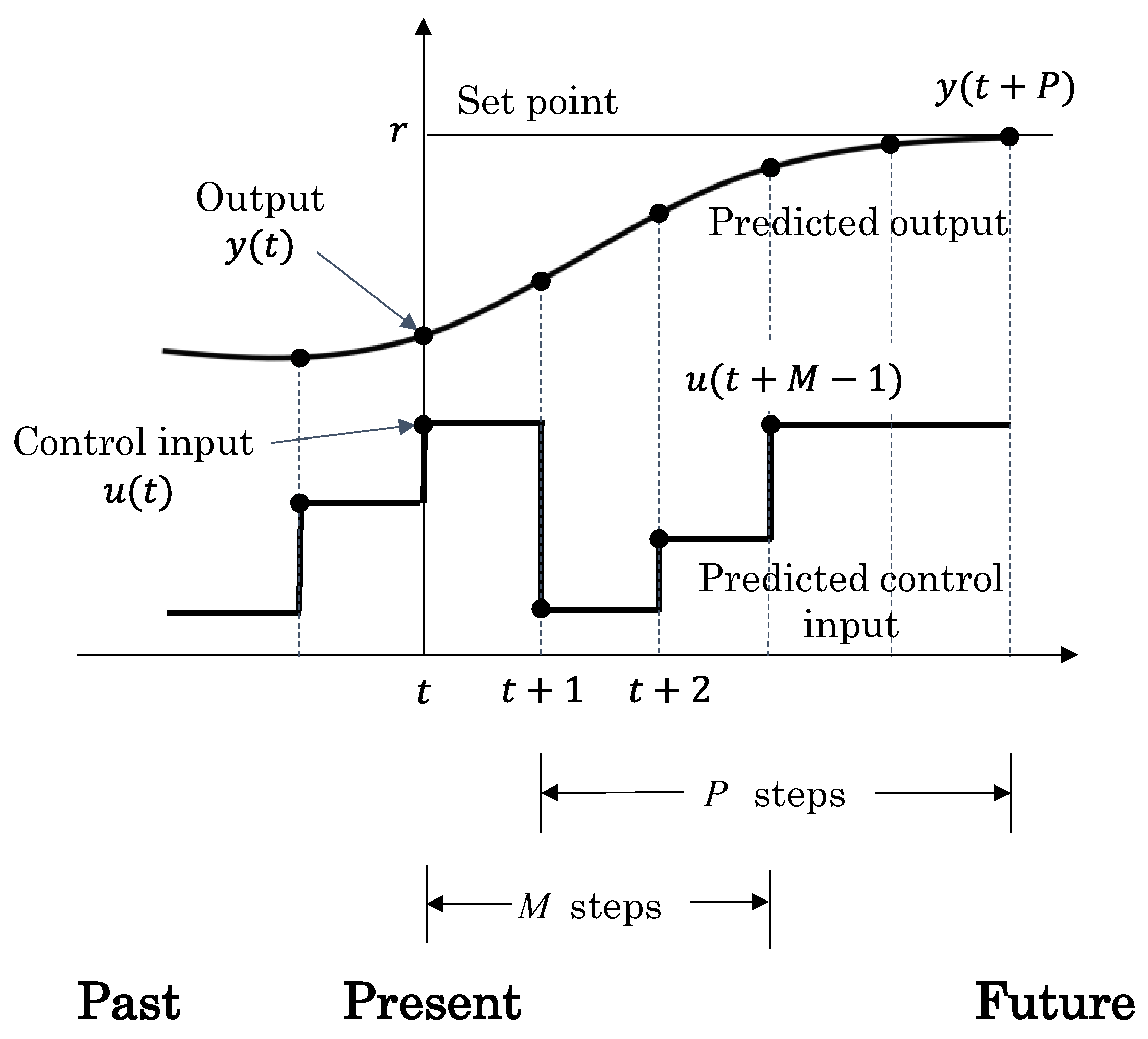
4.1. Algorithms for Model Predictive Control
- The control input trajectories of are calculated such that the predicted output in the section of steps in [ is closest to the target value , and the control input in the section of steps in [ is the minimum.
- The first step of the calculated control input trajectory is used as the input for the next step until sampling time .
- Time is advanced by one step, and the procedure returns to step I.
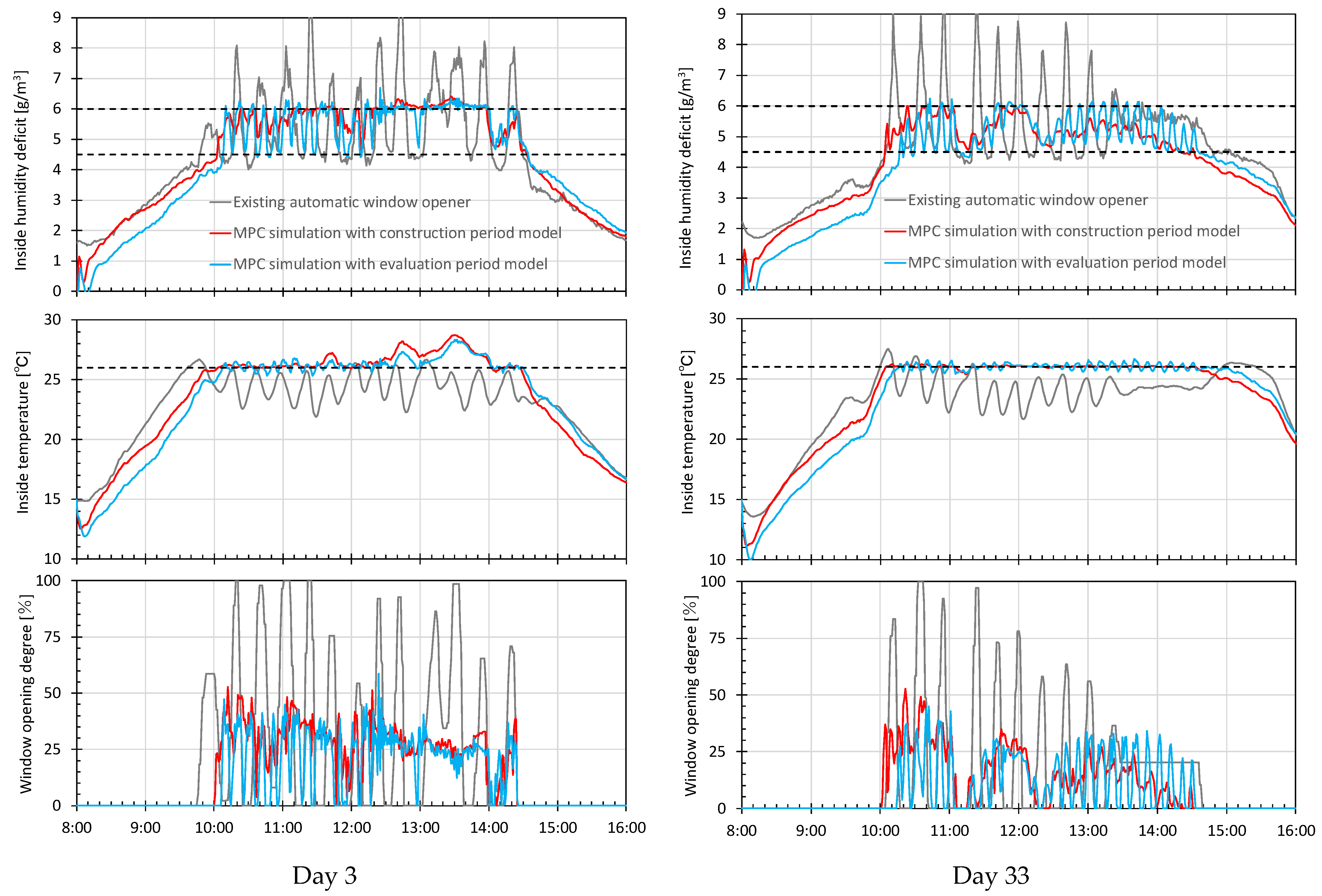
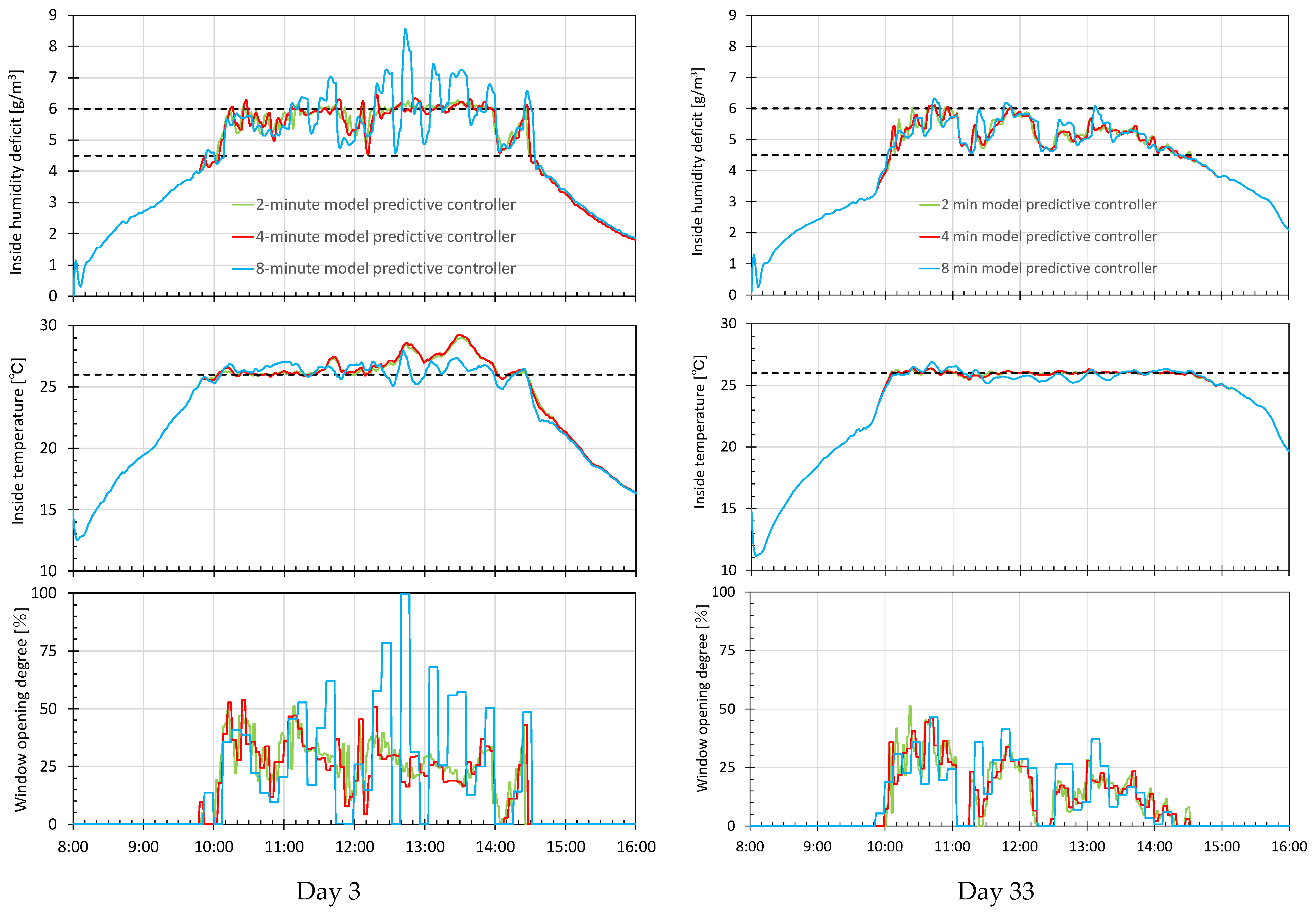
4.2. Model Predictive Control Simulation
4.3. Effects of the Sampling Period on the Model Predictive Controller
5. Considerations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bailey, B.J.; Seginer, I. Optimum control of greenhouse. Acta Hortic. 1989, 245, 512–518. [Google Scholar] [CrossRef]
- Seginer, I. Optimal Greenhouse Temperature Trajectories for a Multi-State-Variable Tomato Model. In Proceedings of the IFAC Mathematical and Control Applications in Agriculture and Horticulture, Matsuyama, Japan, 30 September–3 October 1991. [Google Scholar]
- Stanghellini, C.; de Jong, T. A model of humidity and its applications in a greenhouse. Agric. For. Meteorol. 1995, 76, 129–148. [Google Scholar] [CrossRef]
- Nielsen, B.; Madsen, H. Identification of transfer functions for control of greenhouse air temperature. Agric. Eng. Res. 1995, 60, 25–34. [Google Scholar] [CrossRef]
- Nielsen, B.; Madsen, H. Predictive Control of air Temperature in Greenhouses. In Proceedings of the IFAC 13th Triennial World Congress, San Francisco, CA, USA, 30 June–5 July 1996. [Google Scholar]
- Sigrimis, N.; Rerras, N. A linear model for greenhouse control. Am. Soc. Agric. Biol. Eng. 1996, 39, 253–261. [Google Scholar] [CrossRef]
- Boaventura Cunha, J.; Couto, C.; Ruano, A.E. Real-time parameter estimation of dynamic temperature models for greenhouse environmental control. Control Eng. Pract. 1997, 5, 1473–1481. [Google Scholar] [CrossRef]
- Senent, J.S.; Martinez, M.A.; Blasco, X.; Sanchis, J. MIMO Predictive Control of Temperature and Humidity inside a Greenhouse using Simulated Annealing (SA) as Optimizer of a Multicriteria Index. In Proceedings of the 11th International Conference on Industrial and Engineering Applications of Artificial Intelligence and Expert Systems, Castellon, Spain, 1 June 1998. [Google Scholar]
- Van Straten, G.; van Willigenburg, G.; van Henten, E.; van Ooteghem, R. Optimal Control of Greenhouse Cultivation; CRC Press: Boca Raton, FL, USA, 2010; pp. 39–88. [Google Scholar]
- Rodríguez, F.; Berenguel, M.; Guzmán, J.L.; Ramírez-Arias, A. Modeling and Control of Greenhouse Crop Growth; Springer International Publishing: Berlin, Germany, 2015; pp. 1–96. [Google Scholar]
- Leyva, R.; Constán-Aguilar, C.; Sánchez-Rodríguez, E.; Romero-Gámez, M.; Soriano, T. Cooling systems in screenhouses: Effect on microclimate, productivity and plant response in a tomato crop. Biosyst. Eng. 2015, 129, 100–111. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, Z.; Li, J.; Chang, Y.; Du, Q.; Pan, T. Regulation of vapor pressure deficit by greenhouse micro-fog systems improved growth and productivity of tomato via enhancing photosynthesis during summer season. PLoS ONE 2015, 10, e0133919. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Du, Q.; Zhang, Z.; Jiao, X.; Song, X.; Li, J. Vapour pressure deficit control in relation to water transport and water productivity in greenhouse tomato production during summer. Sci. Rep. 2017, 7, 43461. [Google Scholar] [CrossRef]
- Koga, T.; Yamaguchi, K.; Iwata, H.; Kurimoto, I. Kriging interpolation evaluation of vapor pressure deficit in plant factory with solar light. J. Control Meas. Syst. Integr. 2020, 13, 131–137. [Google Scholar] [CrossRef]
- Takakura, T. Why control by vapor pressure deficit rather than relative humidity? Agric. Hortic. 2014, 89, 40–43. (In Japanese) [Google Scholar]
- Saito, A. The Guidebook of Climate Control for Greenhouse; Rural Culture Association Japan: Tokyo, Japan, 2015; pp. 32–37. (In Japanese) [Google Scholar]
- Akayama, N.; Arita, D.; Shimada, A.; Taniguchi, R.I. A Web Application for Visualizing Sensor Information in Farm Fields. In Proceedings of the 9th International Conference on Sensor Networks, Valletta, Malta, 28–29 February 2020. [Google Scholar]
- El Ghoumari, M.Y.; Tantau, H.-J.; Serrano, J. Non-linear constrained MPC: Real-time implementation of greenhouse air temperature control. Comput. Electron. Agric. 2005, 49, 345–356. [Google Scholar] [CrossRef]
- Frausto, H.U.; Pieters, J.G.; Deltour, J.M. Modelling greenhouse temperature by means of auto regressive models. Biosyst. Eng. 2003, 84, 147–157. [Google Scholar] [CrossRef]
- Frausto, H.U.; Pieters, J.G. Modeling greenhouse temperature using system identification by means of neural networks. Neurocomputing 2004, 56, 423–428. [Google Scholar] [CrossRef]
- Pawlowski, A.; Guzmán, J.L.; Rodríguez, F.; Berenguel, M.; Normey-Rico, J.E. Predictive Control with Disturbance Forecasting for Greenhouse Diurnal Temperature Control. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Outanoute, M.; Selmani, A.; Guerbaoui, M.; Ed-dahhak, A.; Lachhab, A.; Bouchikhi, B. Predictive control algorithm using Laguerre functions for greenhouse temperature control. Int. J. Control Autom. 2018, 11, 11–20. [Google Scholar]
- Hamidane, H.; Faiz, S.E.; Guerbaoui, M.; Ed-Dahhak, A.; Lachhab, A.; Bouchikhi, B. Constrained discrete model predictive control of a greenhouse system temperature. Int. J. Electr. Comput. Eng. 2020, 11, 1223–1234. [Google Scholar] [CrossRef]
- Ito, K.; Tabei, T. Model predictive temperature and humidity control of greenhouse with ventilation. Procedia Comput. Sci. 2021, 192, 212–221. [Google Scholar] [CrossRef]
- Moufid, A.; Bennis, N.; Ramos-Fernandez, J.C.; Hani, S.E. Advanced constrained model predictive control of vapor pressure deficit in agricultural greenhouses. Int. J. Eng. Appl. 2022, 10, 363–374. [Google Scholar] [CrossRef]
- Nakayama, S.; Takada, T.; Kimura, R.; Oka, K. Temperature and humidity deficit model for greenhouses based on system identification method with two-variable input: Quick setup and model evaluation during Spring and Fall. Agric. Inf. Res. 2021, 30, 1–12. (In Japanese) [Google Scholar] [CrossRef]
- Nakayama, S.; Nakawaki, S.; Kimura, R.; Ohsumi, M.; Takada, T. Humidity deficit and air temperature control in greenhouse using a model predictive controller to open windows by degree: Inspection for models with different modeling errors. Bull. Natl. Inst. Technol. Kochi Coll. 2022, 67, 25–34. (In Japanese) [Google Scholar]
- Nakayama, S.; Takada, T.; Kimura, R.; Ohsumi, M. Model Predictive Control of Humidity Deficit and Temperature in Greenhouse by Subspace Method. In Proceedings of the 19th IFAC World Congress, Tokyo, Japan, 1–2 March 2023. [Google Scholar]
- Goo Weather. Kochi Past Weather. Available online: https://weather.goo.ne.jp/past/893/ (accessed on 29 July 2023).
- Overschee, P.V.; Moor, B.D. N4SID: Subspace algorithms for the identification of combined deterministic-stochastic systems. Automatica 1994, 30, 75–93. [Google Scholar] [CrossRef]
- Watari, H.; Yamazaki, T.; Kotaki, M.; Kurosu, S. A lecture on control theory (Part 5)—Model predictive control. Bull. Natl. Inst. Technol. Oyama Coll. 2004, 36, 67–76. (In Japanese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Evaluation | Humidity Deficit | Temperature |
|---|---|---|
| RMSE (g/m3) | RMSE (°C) | |
| Mean ± SD | Mean ± SD | |
| (1) | 0.60 ± 0.17 | 1.57 ± 0.36 |
| (2) | 0.51 ± 0.14 | 1.28 ± 0.50 |
| (3) and (4) * | 0.52 ± 0.20 | 1.14 ± 0.50 |
| (3) On sunny days | 0.68 ± 0.13 | 1.51 ± 0.36 |
| (4) On rainy–cloudy days | 0.37 ± 0.12 | 0.77 ± 0.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakayama, S.; Takada, T.; Kimura, R.; Ohsumi, M. Model Predictive Control of Humidity Deficit and Temperature in Winter Greenhouses: Subspace Weather-Based Modelling and Sampling Period Effects. Machines 2024, 12, 56. https://doi.org/10.3390/machines12010056
Nakayama S, Takada T, Kimura R, Ohsumi M. Model Predictive Control of Humidity Deficit and Temperature in Winter Greenhouses: Subspace Weather-Based Modelling and Sampling Period Effects. Machines. 2024; 12(1):56. https://doi.org/10.3390/machines12010056
Chicago/Turabian StyleNakayama, Shin, Taku Takada, Ryushi Kimura, and Masato Ohsumi. 2024. "Model Predictive Control of Humidity Deficit and Temperature in Winter Greenhouses: Subspace Weather-Based Modelling and Sampling Period Effects" Machines 12, no. 1: 56. https://doi.org/10.3390/machines12010056
APA StyleNakayama, S., Takada, T., Kimura, R., & Ohsumi, M. (2024). Model Predictive Control of Humidity Deficit and Temperature in Winter Greenhouses: Subspace Weather-Based Modelling and Sampling Period Effects. Machines, 12(1), 56. https://doi.org/10.3390/machines12010056