
Trajectory Tracking Control Based on a Composite Disturbance Observer for Unmanned Autonomous Helicopters under Multiple Disturbances



Abstract
:1. Introduction
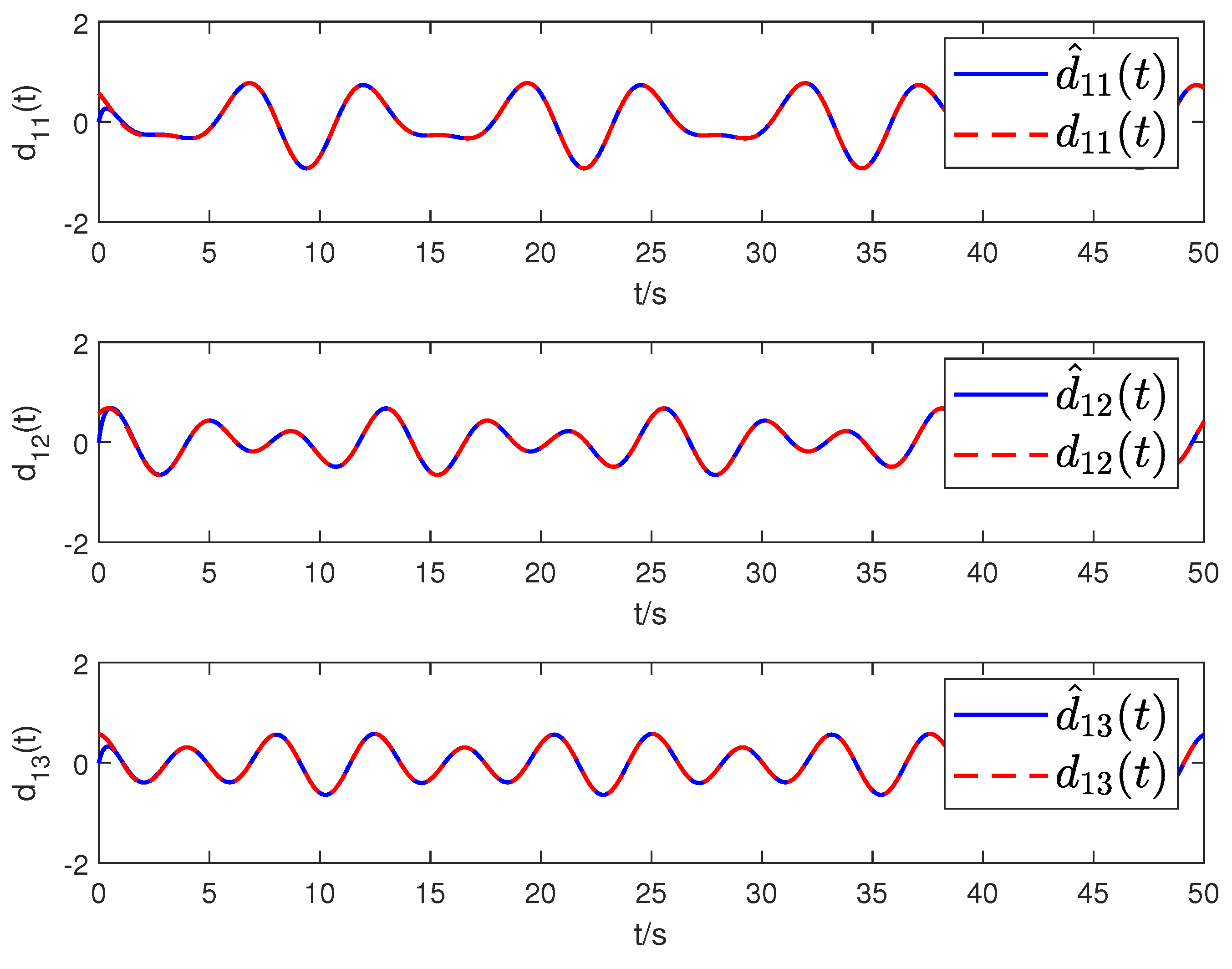
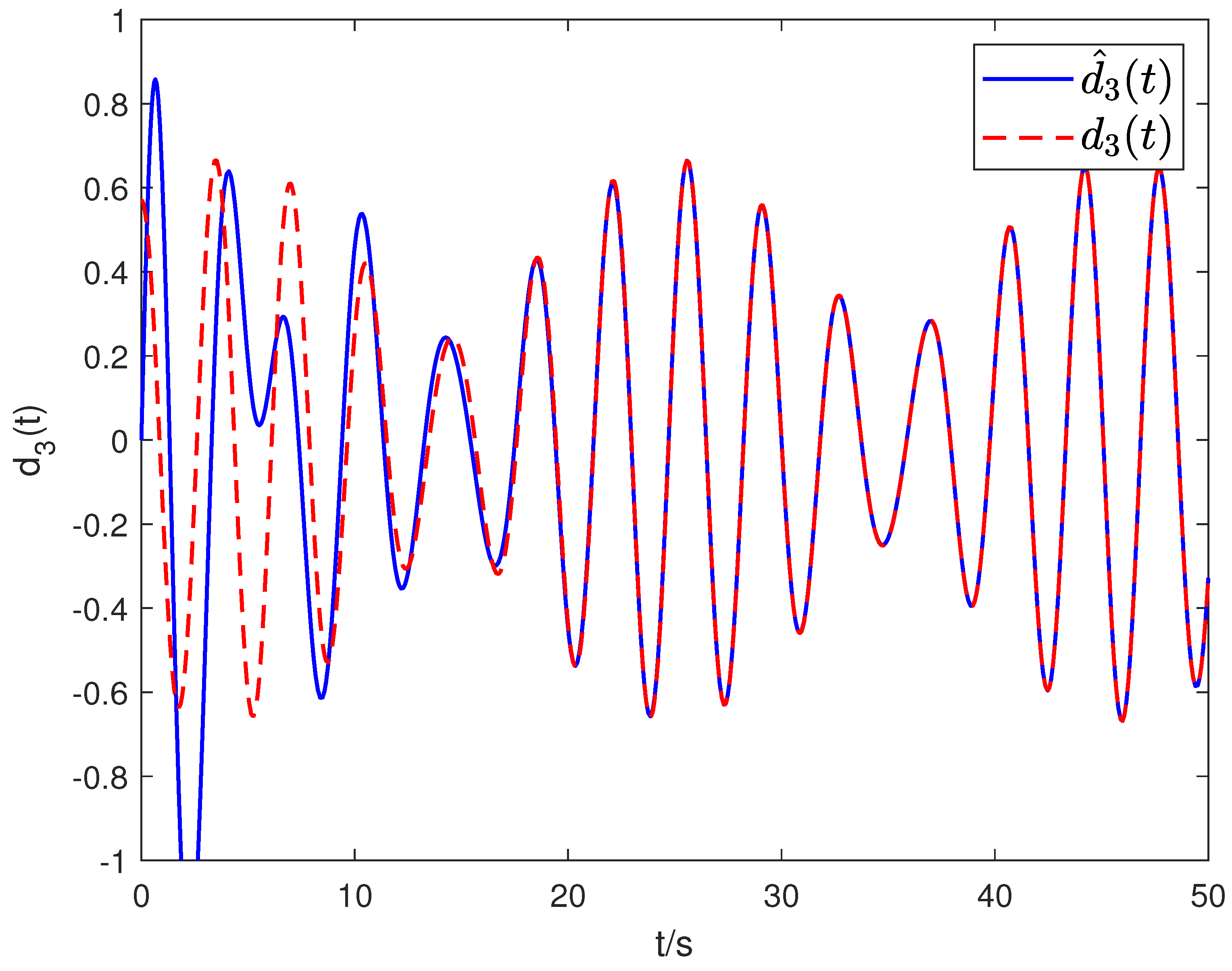
- In practice, the UAH always suffers from different types of outside disturbances. Then, as for the simplified UAH system under matched disturbances and mismatched ones, based on the statistic data and experiences, the disturbances are divided into the modeled parts and the bounded time-variable ones. In order to derive the estimations, a composite observer design strategy is initially proposed, in which the normal DO is utilized to estimate the mismatched disturbance, and the improved RDOs are exploited to estimate the matched disturbance including the modeled part and the bounded one. In comparison with some existent works, our proposed disturbance observer can be more effective in tackling more complicated disturbances.
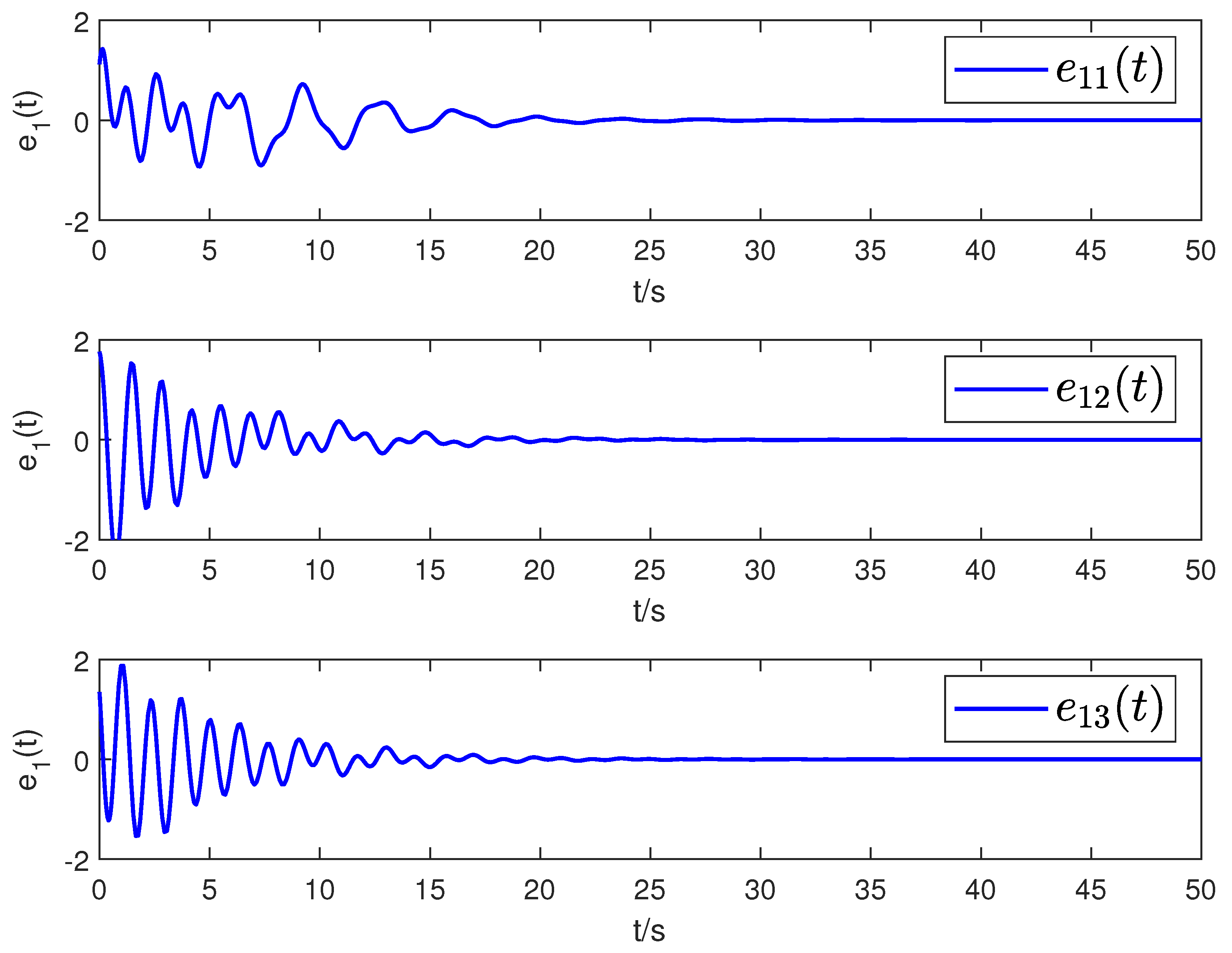
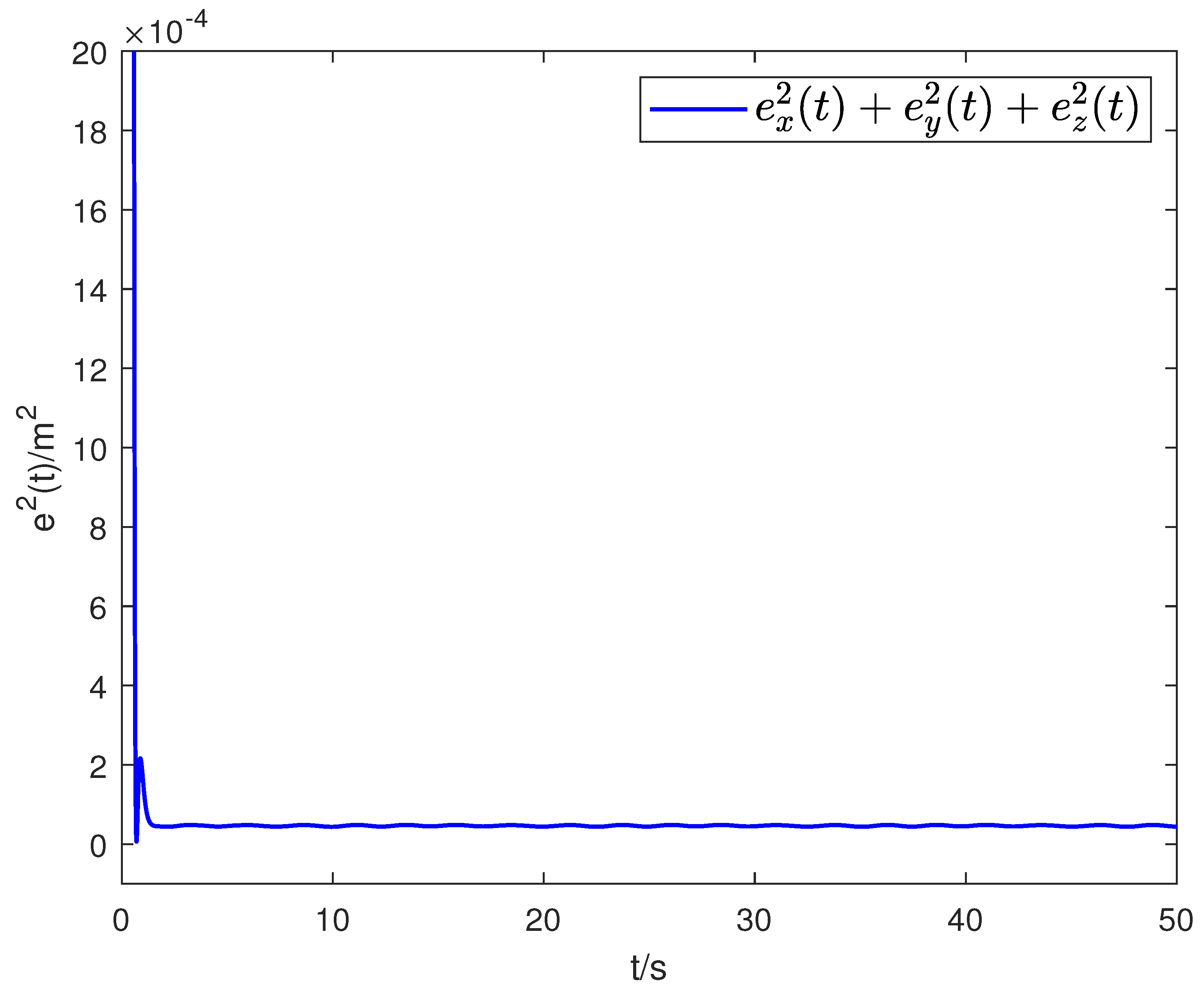
- Based on above estimations and tracking control target, the backstepping control approach is employed to reject the mismatched disturbance, while as for the matched disturbances, two anti-disturbance composite controllers are put forward to reject these disturbances and ensure that the UAH tracks the reference signals. Then, a co-design method of the observer gains and controller ones are established in terms of a set of inequalities. Therefore, by choosing suitable parameters, our proposed control scheme can not only compensate for outside disturbances, but also guarantee that tracking errors are in a reasonable range, as small as possible.
2. Problem Formulation and Preliminaries
2.1. Problem Formulations
2.2. Preliminaries
3. Related Works
4. Approximate Feedback Linearization Model of UAH System
5. Composite Disturbance Observer and Flight Controller of the UAH System
5.1. Anti-Disturbance Backstepping Controller Based on Disturbance Observer
5.2. Anti-Disturbance Backstepping Controller Based on Refined Disturbance Observer
5.3. Stability Analysis
6. Simulated Example
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, B.; Wu, J.; He, W.; Tang, G.; Zhao, Z. Adaptive neural control for an uncertain 2-DOF helicopter system with unknown control direction and actuator faults. Mathematics 2022, 10, 4342. [Google Scholar] [CrossRef]
- Hachiya, D.; Mas, E.; Koshimura, S. A reinforcement learning model of multiple UAVs for transporting emergency relief supplies. Appl. Sci. 2022, 12, 10427. [Google Scholar] [CrossRef]
- Wan, M.; Chen, M.; Lungu, M. Integral backstepping sliding mode control for unmanned autonomous helicopters based on neural networks. Drones 2023, 7, 154. [Google Scholar] [CrossRef]
- Yang, P.; Wang, Z.; Zhang, Z.; Hu, X. Sliding mode fault tolerant control for a quadrotor with varying load and actuator fault. Actuators 2021, 10, 323. [Google Scholar] [CrossRef]
- Ma, H.; Chen, M.; Feng, G.; Wu, Q. Disturbance-observer-based adaptive fuzzy tracking control for unmanned autonomous helicopter with flight boundary constraints. IEEE Trans. Fuzzy Syst. 2023, 31, 184–198. [Google Scholar] [CrossRef]
- Liu, C.; Chen, W.; Andrews, J. Tracking control of small-scale helicopters using explicit nonlinear MPC augmented with disturbance observers. Control Eng. Pract. 2012, 20, 258–268. [Google Scholar] [CrossRef]
- Ullah, I.; Pei, H. Sliding mode tracking control for unmanned helicopter using extended disturbance observer. Arch. Control Sci. 2019, 29, 169–199. [Google Scholar]
- He, Y.; Pei, H.; Sun, T. Robust tracking control of helicopters using backstepping with disturbance observers. Asian J. Control 2014, 16, 1387–1402. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Shi, P.; Li, T. Stochastic anti-disturbance flight control for helicopter systems with switching disturbances under markovian parameters. IEEE Trans. Aerosp. Electron. Syst. 2022, in press. [Google Scholar] [CrossRef]
- Chen, L.; Li, T.; Liu, L.; Mao, Z. Trajectory tracking anti-disturbance control for unmanned aerial helicopter based on disturbance characterization index. Control Theory Technol. 2023, in press. [Google Scholar] [CrossRef]
- Zhou, L.; Jiang, F.; She, J.; Zhang, Z. Generalized-extended-state-observer-based repetitive control for DC motor servo system with mismatched disturbances. Int. J. Control Autom. Syst. 2020, 18, 1936–1945. [Google Scholar] [CrossRef]
- Yang, J.; Zolotas, A.; Chen, W.; Michal, K.; Li, S. Robust control of nonlinear MAGLEV suspension system with mismatched uncertainties via DOBC approach. ISA Trans. 2011, 50, 389–396. [Google Scholar] [CrossRef]
- Sun, S.; Wei, X.; Zhang, H.; Karimi, H.; Han, J. Composite fault-tolerant control with disturbance observer for stochastic systems with multiple disturbances. J. Frankl. Inst. 2018, 355, 4897–4915. [Google Scholar] [CrossRef]
- Aravinth, N.; Satheesh, T.; Sakthivel, R.; Ran, G.; Mohammadzadeh, A. Input-output finite-time stabilization of periodic piecewise systems with multiple disturbances. Appl. Math. Comput. 2023, 453, 128080. [Google Scholar] [CrossRef]
- Cui, Y.; Qiao, J.; Zhu, Y.; Yu, X.; Guo, L. Velocity-tracking control based on refined disturbance observer for gimbal servo system with multiple disturbances. IEEE Trans. Ind. Electron. 2022, 69, 10311–10321. [Google Scholar] [CrossRef]
- Azarmi, R.; Tarvakoli-Kakhki, M.; Fatehi, A. Analytical design of fractional order PID controllers based on the fractional set-point weighted structure: Case study in twin rotor helicopter. Mechatronics 2015, 31, 222–233. [Google Scholar] [CrossRef]
- Mary, A.; Miry, A.; Miry, M. Design robust H-infinity-PID controller for a helicopter system using sequential quadratic programming algorithm. J. Chin. Inst. Eng. 2022, 45, 688–696. [Google Scholar] [CrossRef]
- Liu, L.; Chen, M.; Li, T. Disturbance observer-based LQR tracking control for unmanned autonomous helicopter slung-load system. Int. J. Control Autom. Syst. 2022, 20, 1166–1178. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, Y.; Zhao, Z.; Hong, K. Adaptive neural network control of a 2-DOF helicopter system with input saturation. Int. J. Control Autom. Syst. 2022, 21, 318–327. [Google Scholar] [CrossRef]
- Chen, J.; He, C. Modeling, Fault detection, and fault-tolerant control for nonlinear singularly perturbed systems with actuator faults and external disturbances. IEEE Trans. Fuzzy Syst. 2022, 30, 3009–3022. [Google Scholar] [CrossRef]
- Wang, X.; Lu, G.; Zhong, Y. Robust H-infinity attitude control of a laboratory helicopter. Robot. Auton. Syst. 2013, 61, 1247–1257. [Google Scholar] [CrossRef]
- Koo, T.; Sastry, S. Output tracking control design of a helicopter model based on approximate linearization. In Proceedings of the 37th IEEE Conference on Decision and Control, Tampa, FL, USA, 16–18 December 1998; Volume 4, pp. 3635–3640. [Google Scholar]
- Koo, T.; Sastry, S. Differential flatness based full authority helicopter control design. In Proceedings of the 38th IEEE Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; Volume 2, pp. 1982–1987. [Google Scholar]
- Song, B.; Liu, Y.; Fan, C. Feedback linearization of the nonlinear model of a small-scale helicopter. J. Control Theory Appl. 2010, 8, 301–308. [Google Scholar] [CrossRef]
- Xin, Y.; Qin, Z.; Sun, J. Input-output tracking control of a 2-DOF laboratory helicopter with improved algebraic differential estimation. Mech. Syst. Signal Process. 2019, 116, 843–857. [Google Scholar] [CrossRef]
- Yang, Y.; Zheng, X. Adaptive NN backstepping control design for a 3-DOF helicopter: Theory and experiments. IEEE Trans. Ind. Electron. 2020, 67, 3967–3979. [Google Scholar] [CrossRef]
- Glida, H.; Abdou, L.; Chelihi, A.; Sentouh, C.; Hasseni, S. Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 2020, 100, 3449–3468. [Google Scholar] [CrossRef]
- Wang, X.; Yu, X.; Li, S.; Liu, J. Composite block backstepping trajectory tracking control for disturbed unmanned helicopters. Aerosp. Sci. Technol. 2019, 85, 386–398. [Google Scholar] [CrossRef]
- Fang, X.; Wu, A.; Shang, Y.; Dong, B. Robust control of small-scale unmanned helicopter with matched and mismatched disturbances. J. Frankl. Inst. 2016, 353, 4803–4820. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Li, T.; Wang, H. Robust resilient control based on multi-approximator for the uncertain turbofan system with unmeasured states and disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2016, 353, 4803–4820. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracking Errors | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Methods | 0.4 s | 1.0 s | 0.4 s | 1.0 s | 0.4 s | 1.0 s | 0.4 s | 1.0 s | |
| DOBC in [10] | 0.73 | 0.24 | 0.36 | 0.09 | 0.72 | 0.17 | 1.00 | 0.32 | |
| Theorem 1 in the work | 0.17 | 0.01 | 0.08 | 0.01 | 0.18 | 0.01 | 0.14 | 0.00 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, S.; Wang, T.; Zhang, H.; Li, T. Trajectory Tracking Control Based on a Composite Disturbance Observer for Unmanned Autonomous Helicopters under Multiple Disturbances. Machines 2024, 12, 201. https://doi.org/10.3390/machines12030201
Pan S, Wang T, Zhang H, Li T. Trajectory Tracking Control Based on a Composite Disturbance Observer for Unmanned Autonomous Helicopters under Multiple Disturbances. Machines. 2024; 12(3):201. https://doi.org/10.3390/machines12030201
Chicago/Turabian StylePan, Shihao, Ting Wang, Haoran Zhang, and Tao Li. 2024. "Trajectory Tracking Control Based on a Composite Disturbance Observer for Unmanned Autonomous Helicopters under Multiple Disturbances" Machines 12, no. 3: 201. https://doi.org/10.3390/machines12030201
APA StylePan, S., Wang, T., Zhang, H., & Li, T. (2024). Trajectory Tracking Control Based on a Composite Disturbance Observer for Unmanned Autonomous Helicopters under Multiple Disturbances. Machines, 12(3), 201. https://doi.org/10.3390/machines12030201