
Design and Analysis of a Moment of Inertia Adjustment Device

Abstract
:1. Introduction
2. The Structure and Working Principle of the Moment of Inertia Adjustment Device
3. Theoretical Analysis of the Moment of Inertia Adjustment Device
3.1. Mathematical Model of Moment of Inertia
3.2. Mathematical Model of Temperature Field
4. Electromagnetic Field Simulation of the Moment of Inertia Adjustment Device
4.1. Electromagnetic Field Simulation Analysis
4.2. Electromagnetic Force Test
4.3. Calculation of the Moment of Inertia
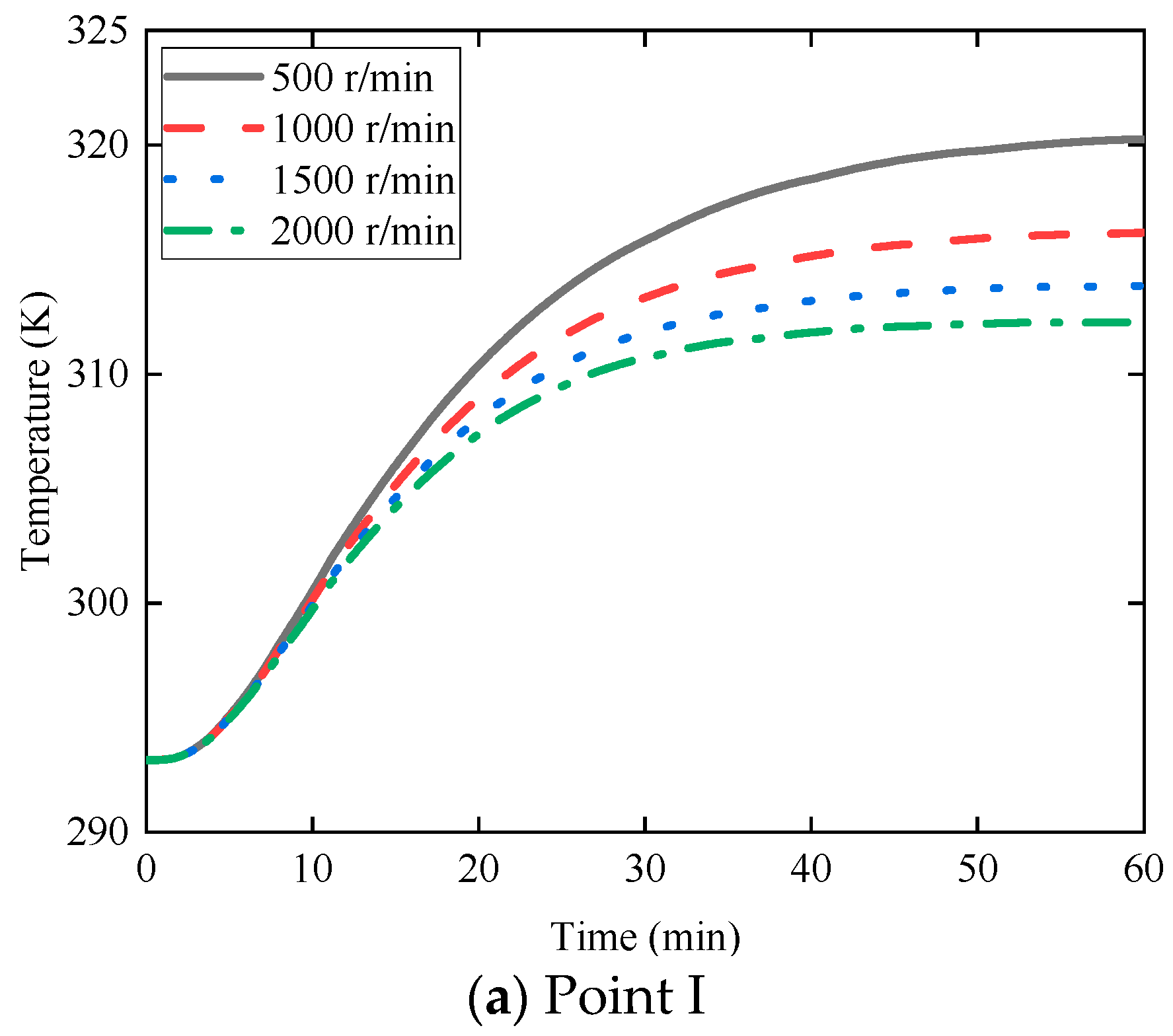
5. Temperature Field Simulation of the Moment of Inertia Adjustment Device
6. Conclusions
- (1)
- A moment of inertia adjustment device was proposed that analyzes the forces acting on a moving mass while the device is rotating and takes into account gravity, friction, centrifugal force, spring force, and electromagnetic force. The forces acting on the moving mass while the device is rotating were analyzed by considering gravity, friction, centrifugal force, spring force, and electromagnetic force at the same time, and a computational model of the device was established. Compared with the centrifugal force, the influence of the gravity of the moving mass is negligible, so the computational model was simplified. The results show that r is related to the rotational angular velocity ω and the electromagnetic force Fe. Therefore, the control of r can be realized by adjusting Fe. The mathematical model of the moment of inertia was established, and the relationship between the moment of inertia and r was obtained. The results show that the control of the moment of inertia can be achieved by adjusting r. A temperature field model was established to obtain some parameter values for use in the simulation software.
- (2)
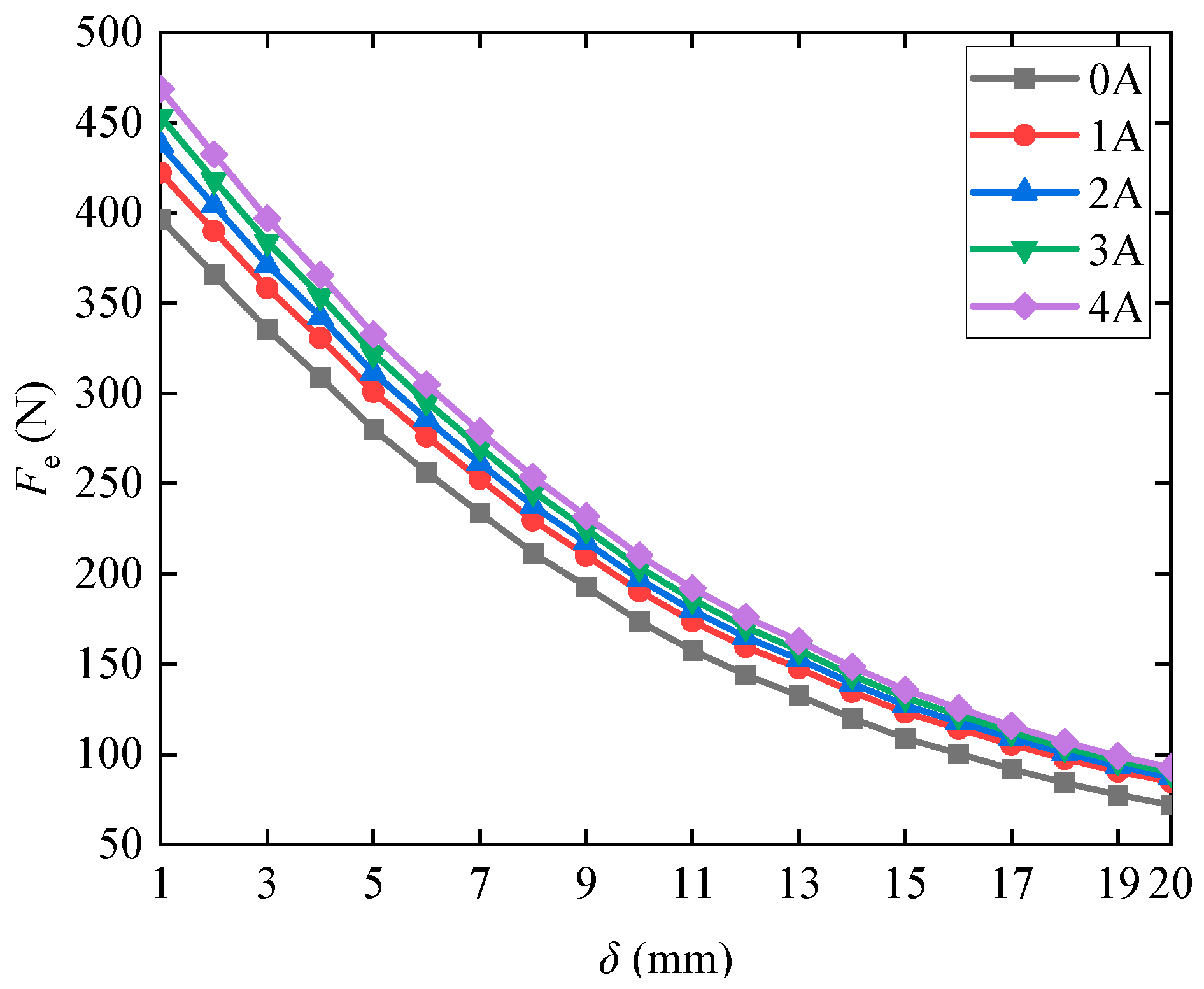
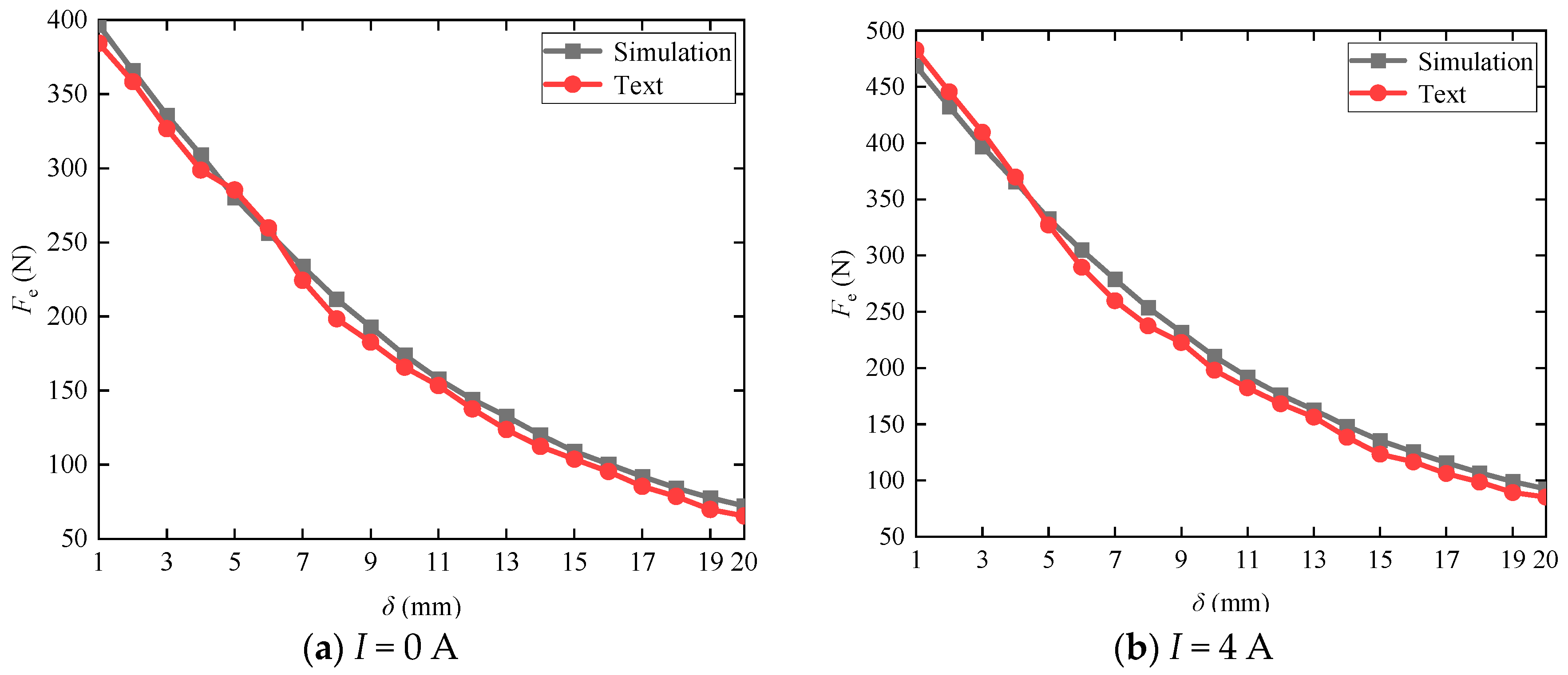
- A electromagnetic field simulation model for the electromagnetic control device was established. The following assumptions were made for the electromagnetic field calculations. First, the magnetic induction was assumed to be uniformly distributed in the magnetic field. Second, leakage from the coil and permanent magnet was neglected. The distribution characteristics of the electromagnetic field and the variation in electromagnetic force with air gap were analyzed. The results show that at a constant current value, the electromagnetic force decreases as the air gap increases. When the air gap is constant, the electromagnetic force increases with increasing current. An electromagnetic force test system of the electromagnetic control unit was designed and constructed. The results of the electromagnetic force test are close to the results of the finite element simulation analysis, which confirms the accuracy and effectiveness of the simulation model. The maximum relative error between them was 7.33%. The variation in the device’s moment of inertia under different speeds and currents was discussed. The results show that the proposed moment of inertia adjustment device can be used to significantly adjust the moment of inertia. The maximum adjustable proportion of its moment of inertia can reach 39.04%. This work provides a reference for better controlling vibrations in rotor systems.
- (3)
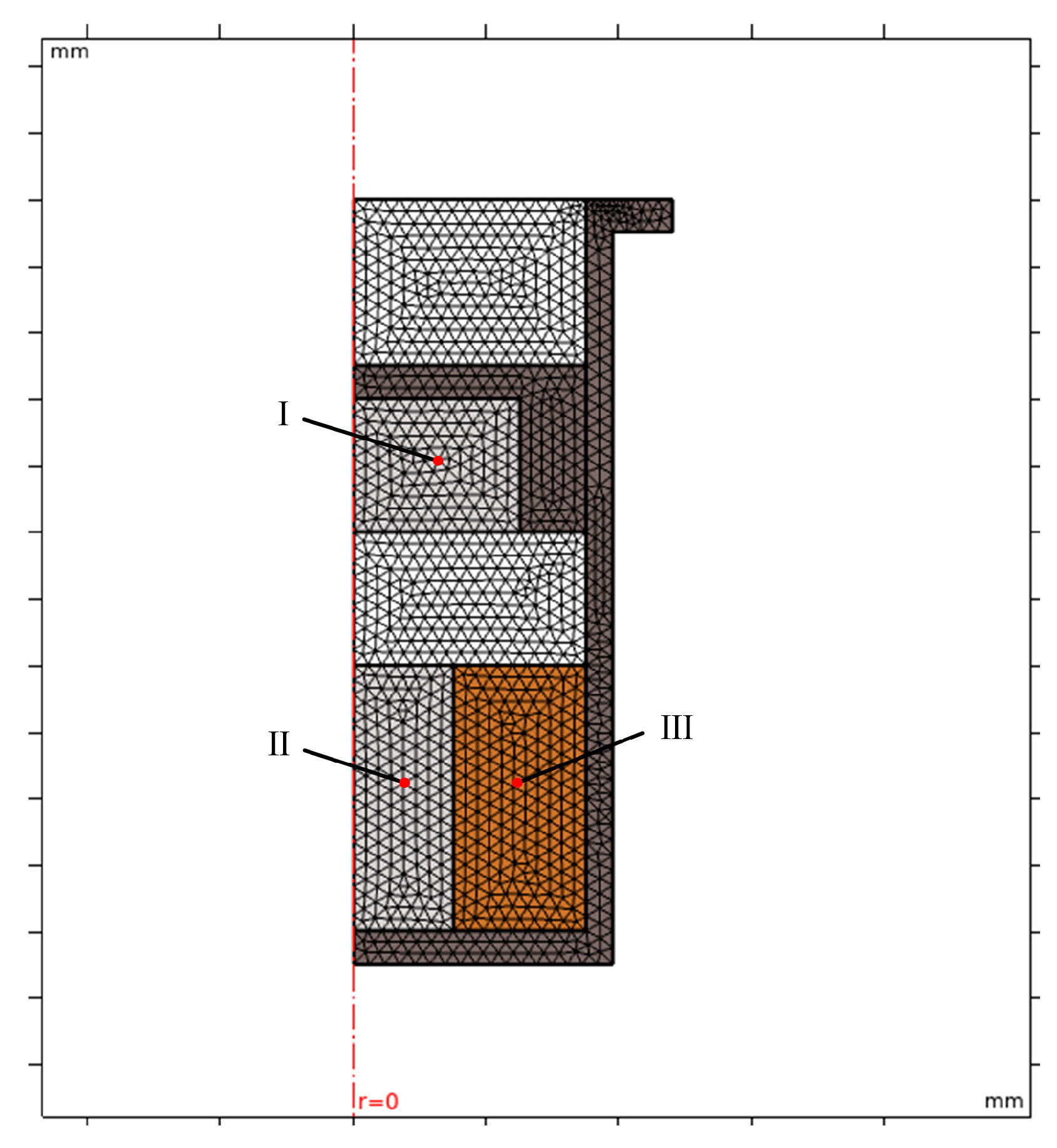
- A temperature field simulation model for the electromagnetic control device was established. The following assumptions were made for the temperature field calculations. First, the coil heating power was assumed to be uniform. Second, the contact resistance between parts was neglected. The temperature variation in the electromagnetic control device was analyzed. The temperature of the electromagnetic control unit increased with time and then stabilized. The temperature of permanent magnet 1 was slightly lower than the temperature of the coil, and both of their temperatures were higher than the temperature of permanent magnet 2. The results show that the maximum temperature of the electromagnetic control device was 332 K in 60 min, while the maximum operating temperatures of the permanent magnet and coil were 350 K and 358 K, respectively, which are in accordance with the requirements.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ge, Z.; Li, G.; Chen, S.; Wang, W. Influence of Nonlinear Characteristics of Planetary Flywheel Inerter Actuator on Vehicle Active Suspension Performance. Actuators 2023, 12, 252. [Google Scholar] [CrossRef]
- Christopher, D.A.; Beach, R. Flywheel technology development program for aerospace applications. IEEE Aerosp. Electron. Syst. Mag. 1998, 13, 9–14. [Google Scholar] [CrossRef]
- Amiryar, M.E.; Pullen, K.R. Analysis of Standby Losses and Charging Cycles in Flywheel Energy Storage Systems. Energies 2020, 13, 4441. [Google Scholar] [CrossRef]
- Hu, H.; Wei, J.; Wang, H.; Xiao, P.; Zeng, Y.; Liu, K. Analysis of the Notch Filter Insertion Position for Natural Frequency Vibration Suppression in a Magnetic Suspended Flywheel Energy Storage System. Actuators 2023, 12, 22. [Google Scholar] [CrossRef]
- Bolund, B.; Bernhoff, H.; Leijon, M. Flywheel energy and power storage systems. Renew. Sustain. Energy Rev. 2007, 11, 235–258. [Google Scholar] [CrossRef]
- Li, T.; Zeng, F.; Qin, J. The determination of moment of inertia of flywheel for pulsed-load diesel generator. In Proceedings of the Second International Conference on Mechanic Automation & Control Engineering, Mongolia, China, 15–17 July 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Yang, S.; Xu, T.; Li, C.; Liang, M.; Baddour, N. Design, Modeling and Testing of a Two-Terminal Mass Device With a Variable Inertia Flywheel. J. Mech. Des. 2016, 138, 095001. [Google Scholar] [CrossRef]
- Liu, P.; Ning, D.; Luo, L.; Zhang, N.; Du, H. An electromagnetic variable inertance and damping seat suspension with controllable circuits. IEEE Trans. Ind. Electron. 2021, 69, 2811–2821. [Google Scholar] [CrossRef]
- Megahed, S.M.; Abd El-Razik, A.K. Vibration control of two degrees of freedom system using variable inertia vibration absorbers: Modeling and simulation. J. Sound Vib. 2010, 329, 4841–4865. [Google Scholar] [CrossRef]
- Li, W.; Dong, X.; Yu, J.; Xi, J.; Pan, C. Vibration control of vehicle suspension with magneto-rheological variable damping and inertia. J. Intell. Mater. Syst. Struct. 2021, 32, 1484–1503. [Google Scholar] [CrossRef]
- Oliver, W.; Burstall, J. Variable Inertia Flywheel. U.S. Patent 20030178972A1, 26 April 2005. [Google Scholar]
- Dugas, P.J. Variable Inertia Flywheel. U.S. Patent US20150204418A1, 23 July 2015. [Google Scholar]
- Xu, T.; Liang, M.; Li, C. Design and analysis of a shock absorber with variable moment of inertia for passive vehicle suspensions. J. Sound Vib. 2015, 355, 66–85. [Google Scholar] [CrossRef]
- Kondoh, J.; Funamoto, T.; Nakanishi, T.; Arai, R. Energy characteristics of a fixed-speed flywheel energy storage system with direct grid-connection. Energy 2018, 165, 701–708. [Google Scholar] [CrossRef]
- Kushwaha, P.; Ghoshal, S.K.; Dasgupta, K. Dynamic analysis of a hydraulic motor drive with variable inertia flywheel. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 234, 734–747. [Google Scholar] [CrossRef]
- Dong, X.; Xi, J.; Chen, P. Magneto-rheological variable inertia flywheel. Smart Mater. Struct. 2018, 27, 115015. [Google Scholar] [CrossRef]
- Harrowell, R.V. Elastomer flywheel energy store. Int. J. Mech. Sci. 1994, 36, 95–103. [Google Scholar] [CrossRef]
- Chen, P.; Yang, Y. Design, Dynamics Modeling, and Experiments of a Vibration Energy Harvester on Bicycle. Trans. Mechatron. 2023, 28, 2670–2678. [Google Scholar] [CrossRef]
- Li, Q.; Li, X.; Mi, J. Tunable wave energy converter using variable inertia flywheel. IEEE Trans. Sustain. Energy 2020, 12, 1265–1274. [Google Scholar] [CrossRef]
- Luan, G.; Liu, P.; Ning, D.; Liu, G.; Du, H. Semi-Active Vibration Control of Seat Suspension Equipped with a Variable Equivalent Inertance-Variable Damping Device. Machines 2023, 11, 284. [Google Scholar] [CrossRef]
- Ning, D.; Du, H.; Sun, S.; Zheng, M.; Li, W.; Zhang, N.; Jia, Z. An electromagnetic variable stiffness device for semiactive seat suspension vibration control. IEEE Trans. Ind. Electron. 2019, 67, 6773–6784. [Google Scholar] [CrossRef]
- Ibrahim, P.; Arafa, M.; Anis, Y. An electromagnetic vibration energy harvester with a tunable mass moment of inertia. Sensors 2021, 21, 5611. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Dong, X.; Xi, J.; Deng, X.; Shi, K.; Zhou, Y. Semi-active vibration control of a transmission system using a magneto-rheological variable stiffness and damping torsional vibration absorber. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2679–2698. [Google Scholar] [CrossRef]
- Liu, P.; Zheng, M.; Ning, D.; Luo, L.; Zhang, N. A Novel Controllable Electromagnetic Variable Inertance Device for Vehicle Vibration Reduction. Vib. Eng. A Sustain. Future Act. Passiv. Noise Vib. Control. 2021, 1, 103–109. [Google Scholar]
- Chen, H.; Li, Y.; Long, Z.; Chang, W. Optimal design and characteristic analysis of hybrid magnet in maglev system. J. Syst. Simul. 2010, 22, 837–840. [Google Scholar]
- Zhang, Y.; Zhang, X.; Qian, T.; Hu, R. Modeling and simulation of a passive variable inertia flywheel for diesel generator. Energy Rep. 2020, 6, 58–68. [Google Scholar] [CrossRef]
- Wang, S.Y.; Song, W.L.; Li, H.L.; Wang, N. Modeling and multi-field simulation analysis of a multi-cylindrical magneto-rheological brake. Int. J. Appl. Electromagn. Mech. 2018, 57, 399–414. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| Permanent magnet 1 diameter d1 (mm) | 30 | Sleeve outside diameter d2 (mm) | 70 |
| Permanent magnet 2 diameter d3 (mm) | 50 | Cylinder outside diameter d4 (mm) | 78 |
| Permanent magnet 1 heights h1 (mm) | 40 | Permanent magnet 2 heights h3 (mm) | 20 |
| Sleeve heights h2 (mm) | 24 | Coil diameter d5 (mm) | 1 |
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| Curie point of the permanent magnets (K) | 350 | Permanent magnet remanence Br (T) | 1.43 |
| Air permeability µ0 (H/mm) | 1.25 × 10−8 | Coercivity of permanent magnets (kA/mm) | 10.34 |
| Parameter | Value |
|---|---|
| Heating power of the coil P (W) | 45.1 |
| Composite thermal conductivity hs (W/(m2·K)) | 9.7 |
| Thermal conductivity ha (W/(m2·K)) | 59.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, L.; Wan, Z.; Li, G. Design and Analysis of a Moment of Inertia Adjustment Device. Machines 2024, 12, 204. https://doi.org/10.3390/machines12030204
Zeng L, Wan Z, Li G. Design and Analysis of a Moment of Inertia Adjustment Device. Machines. 2024; 12(3):204. https://doi.org/10.3390/machines12030204
Chicago/Turabian StyleZeng, Liping, Zihao Wan, and Gang Li. 2024. "Design and Analysis of a Moment of Inertia Adjustment Device" Machines 12, no. 3: 204. https://doi.org/10.3390/machines12030204
APA StyleZeng, L., Wan, Z., & Li, G. (2024). Design and Analysis of a Moment of Inertia Adjustment Device. Machines, 12(3), 204. https://doi.org/10.3390/machines12030204