
Kinematic and Dynamic Analysis of Eccentric Balanced Positive Torque Pumping Unit


Abstract
:1. Introduction
- (1)
- There remains a significant gap in energy consumption indices between the domestic oil industry and the superior energy-saving standards employed by foreign counterparts. Despite innovation in energy-efficient pumping units, their widespread usage remains limited for sundry reasons, while conventional systems continue to lag behind in efficiency.
- (2)
- The reliability of the basic components of the pumping unit, such as the crank pin, reducer, and wire rope, is inadequate. This creates a hindrance in the introduction of new pumping units. Hence, it is necessary to undertake research on the joint quality of the fundamental constituents of the pumping unit to enhance their quality level.
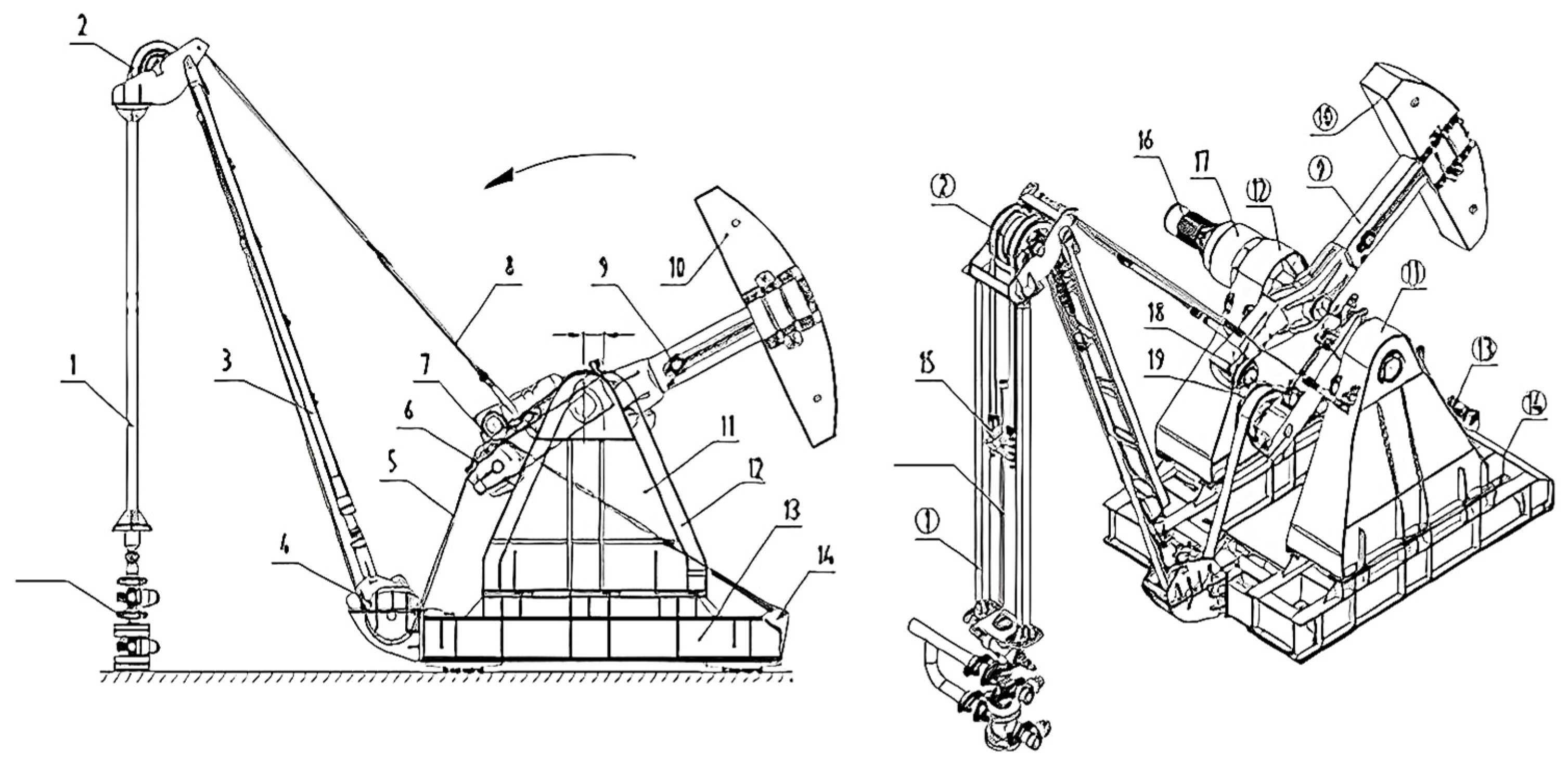
2. The Structure and Principle of Eccentric Balance Positive Torque Pumping Unit
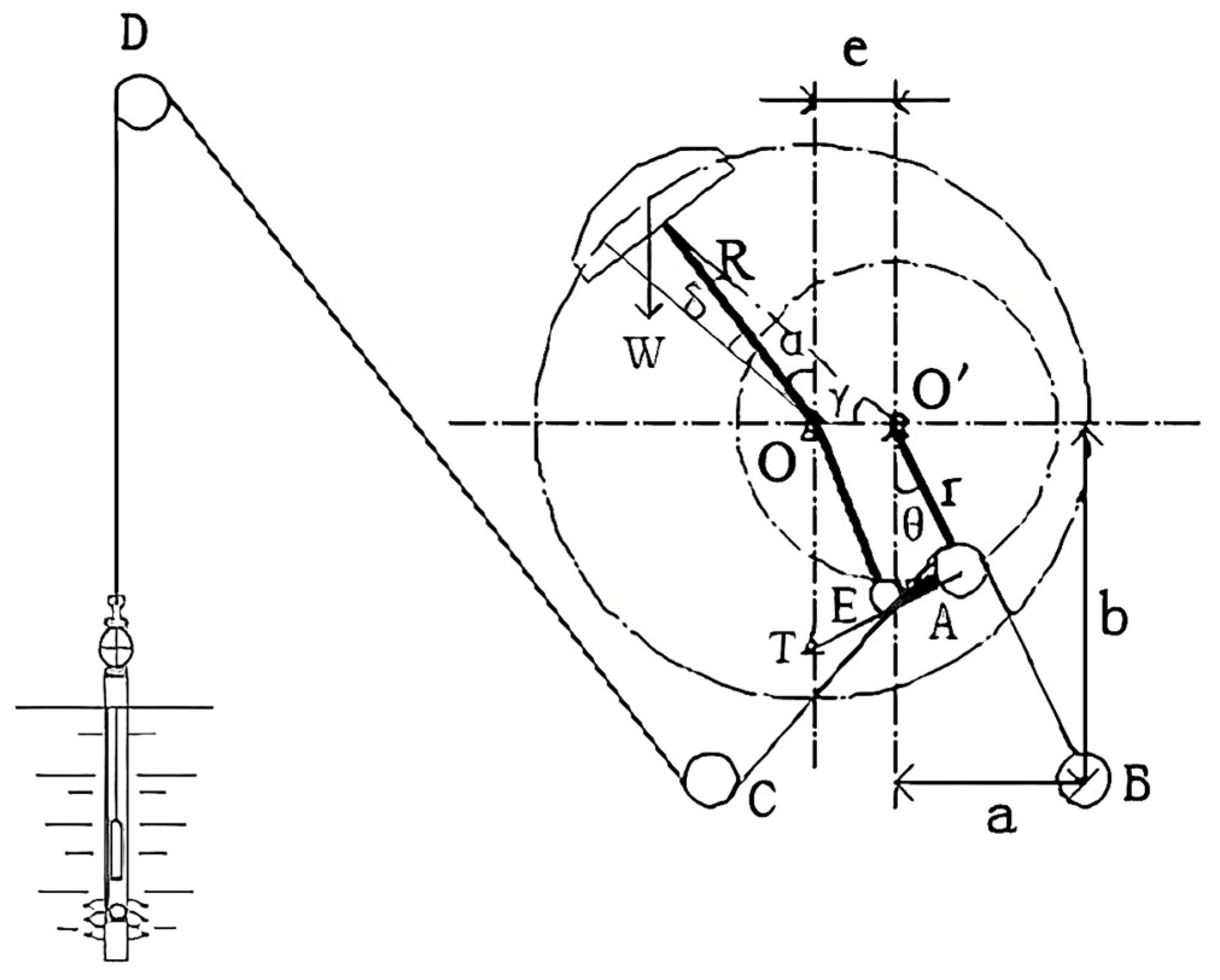
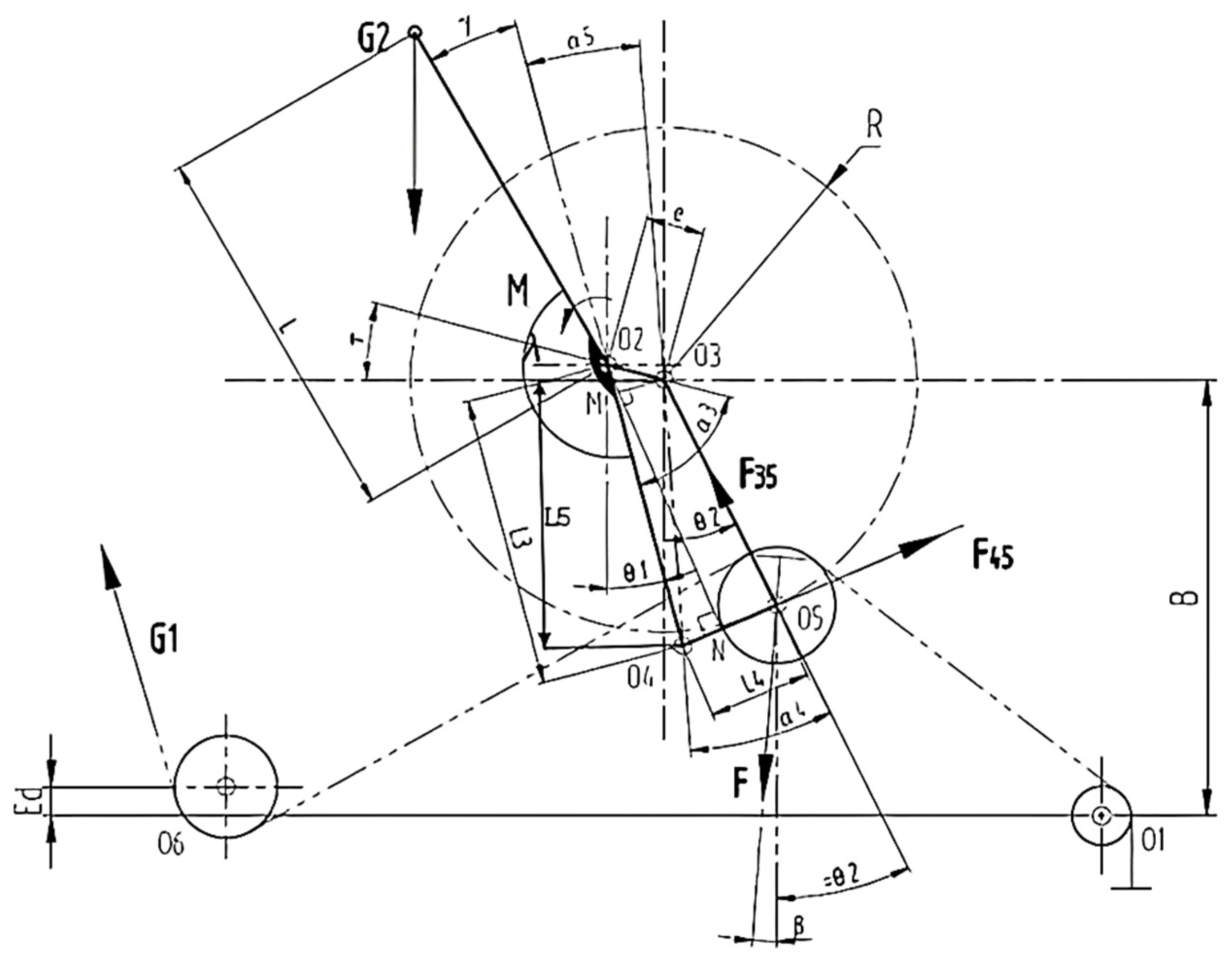
3. Kinematic and Dynamic Theoretical Calculation of Eccentric Balance Positive Torque Pumping Unit
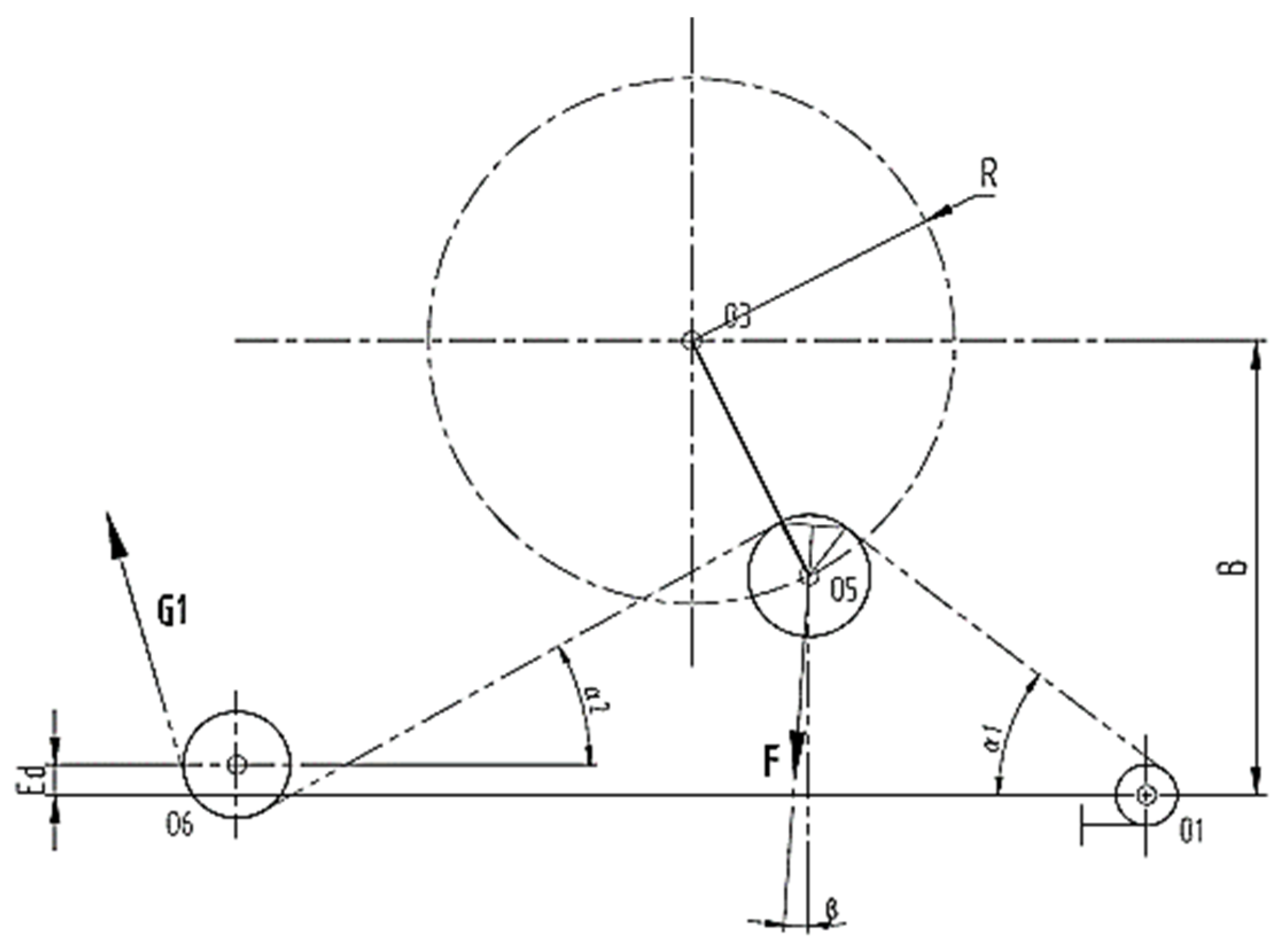
3.1. Kinetic Analysis
3.2. Dynamic Analysis
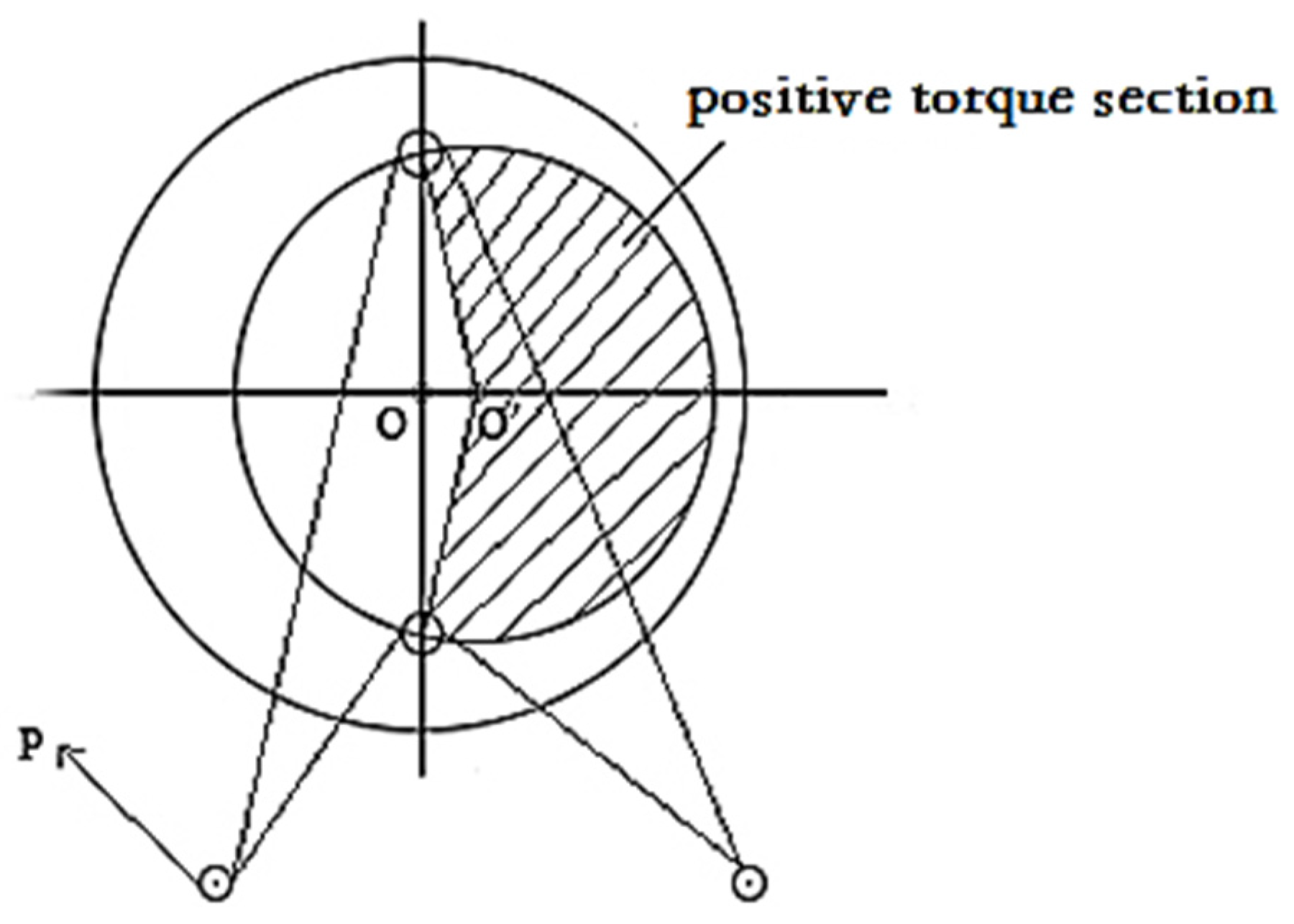
3.3. Calculation of Crank Shaft Torque
3.4. Calculation Examples
4. Simulation Pre-Processing
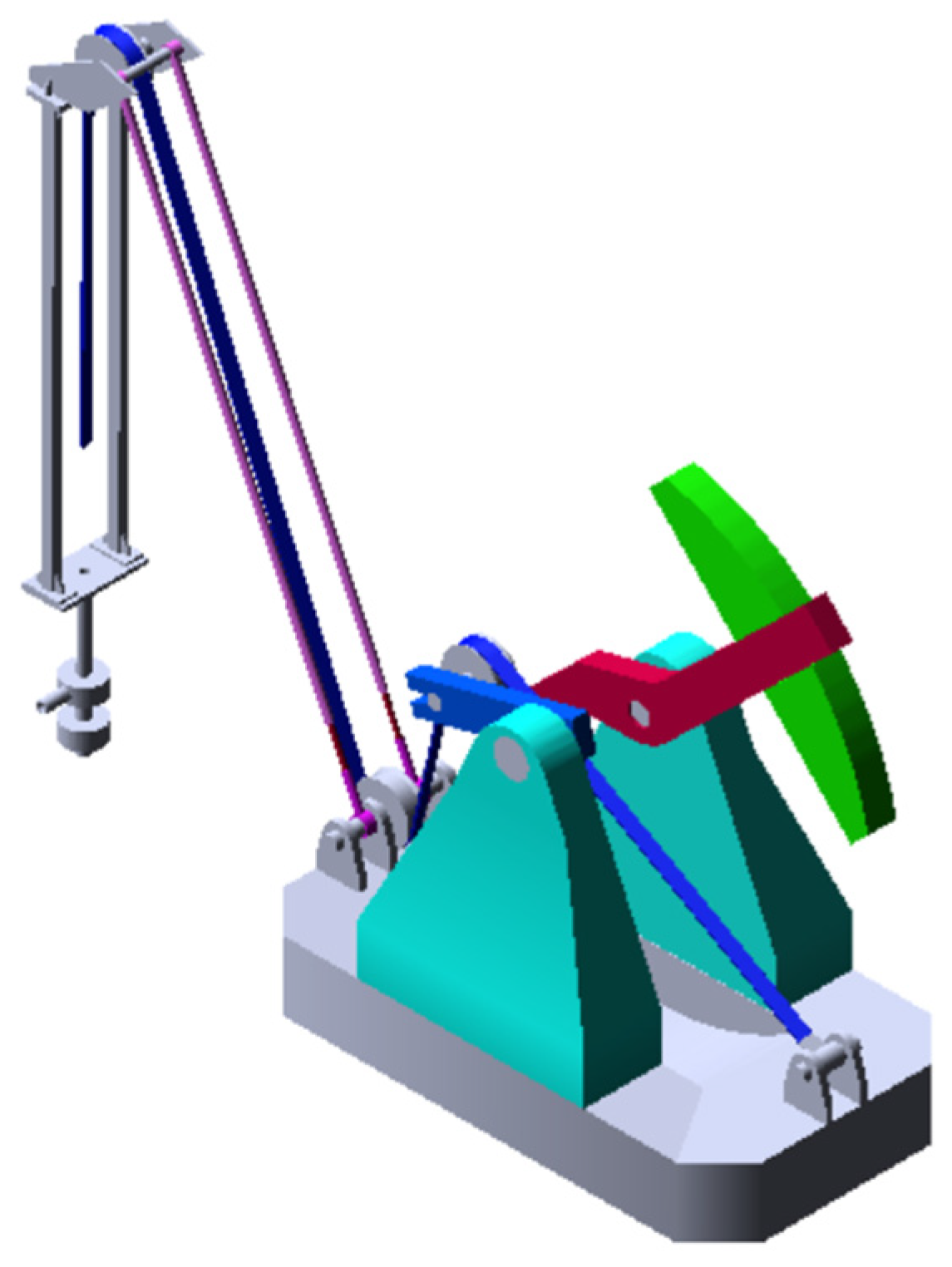
4.1. Modeling
4.2. Editing Part Attributes
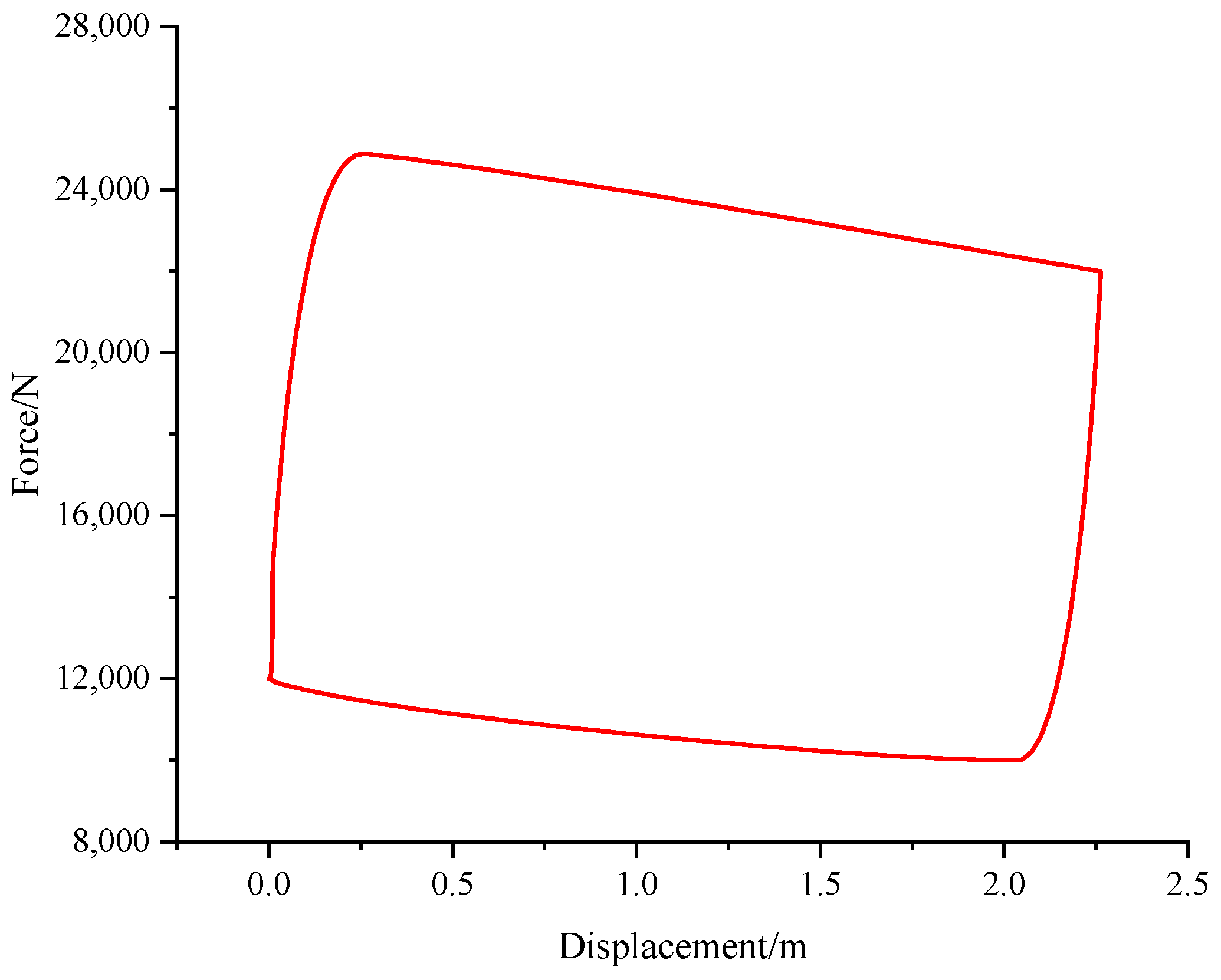
4.3. Applying Polished Rod Load
+ STEP (time, 6.3, 0, 10, 2000)
5. Analysis of Simulation Results
5.1. Kinetic Analysis
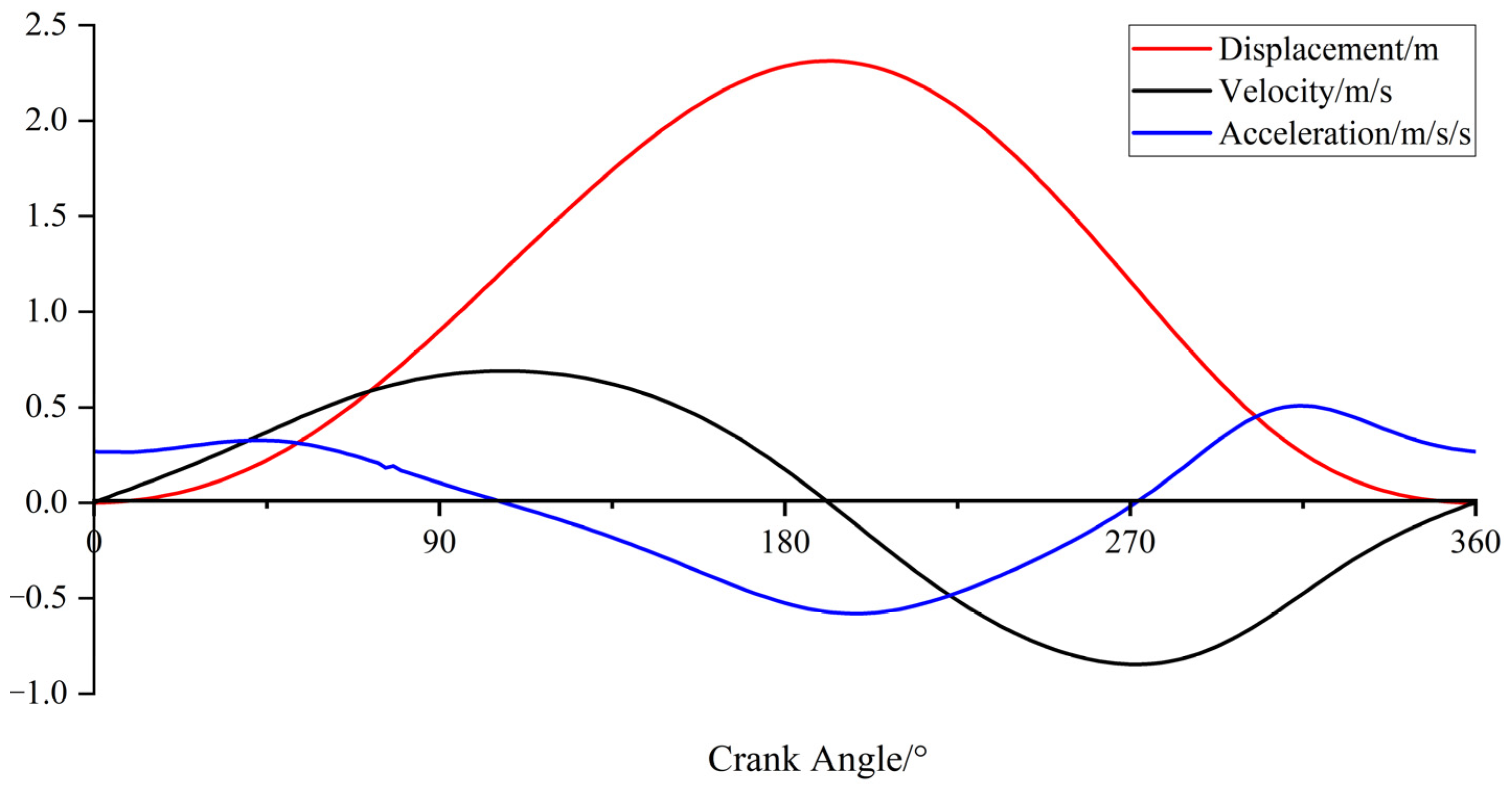
5.1.1. Analysis of Displacement, Velocity and Acceleration of Polished Rod
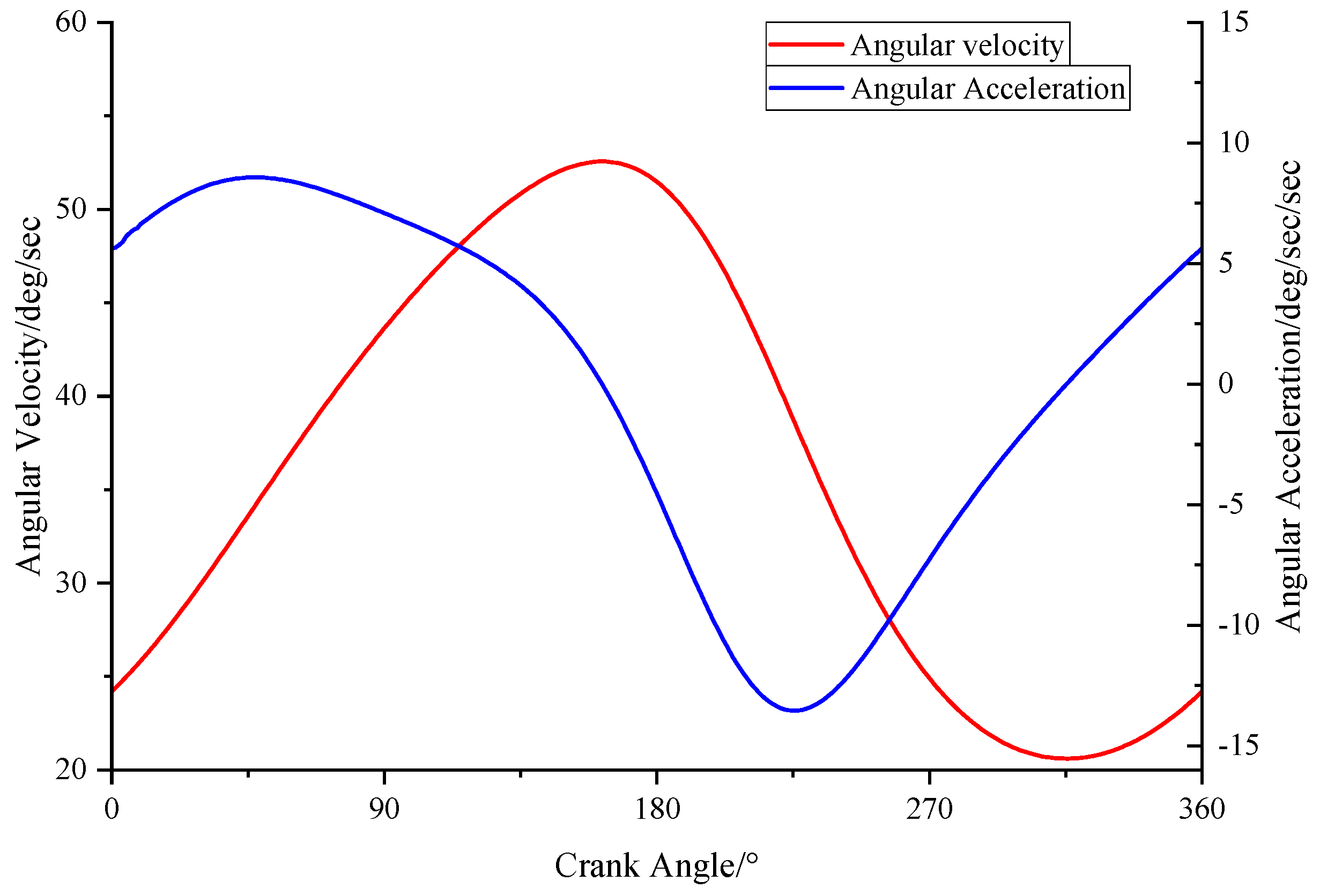
5.1.2. Analysis of Angular Velocity and Angular Acceleration of Moving Pulley Connecting Rod
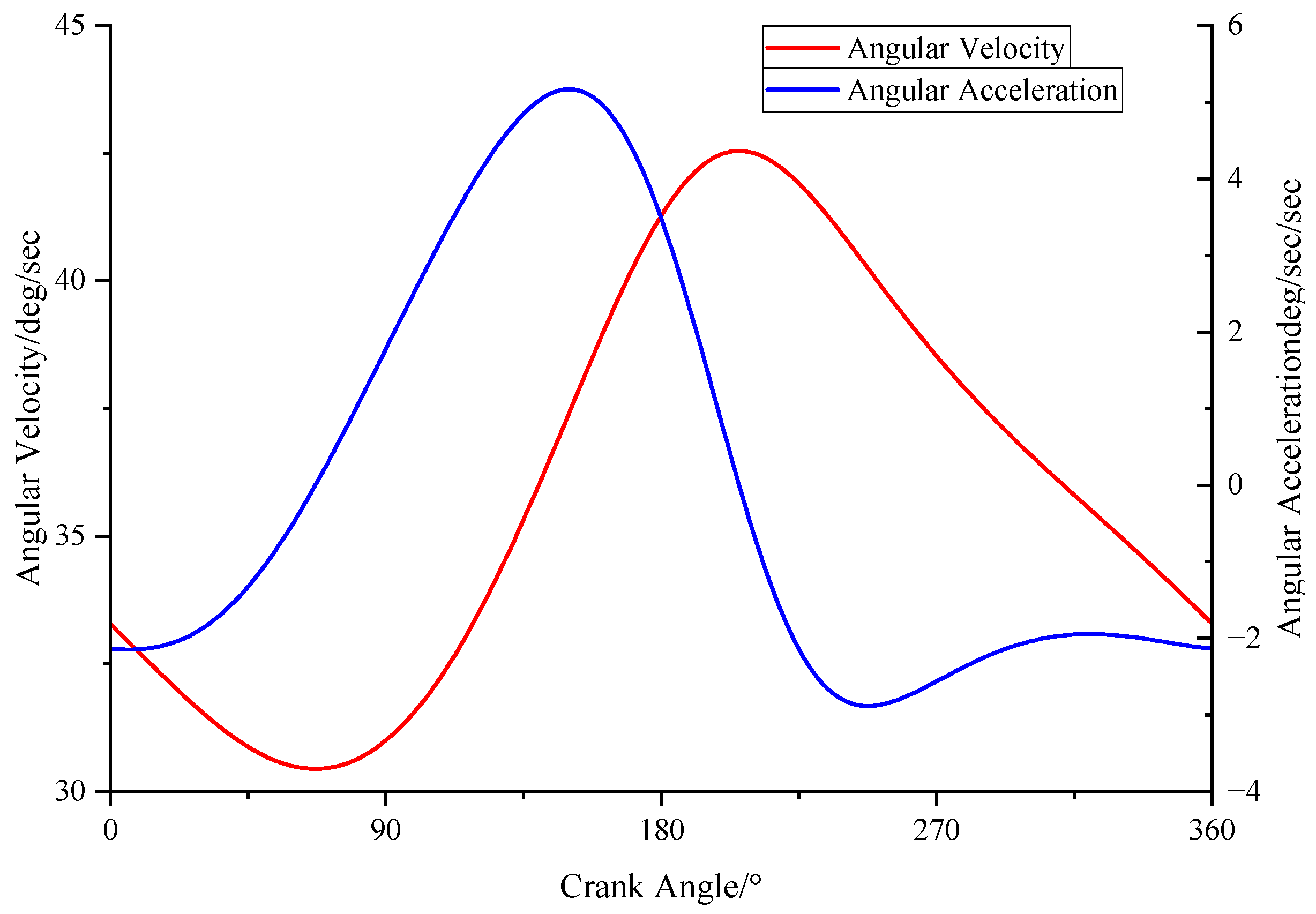
5.1.3. Analysis of Angular Velocity and Angular Acceleration of Moving Pulley Handle
5.2. Dynamic Analysis
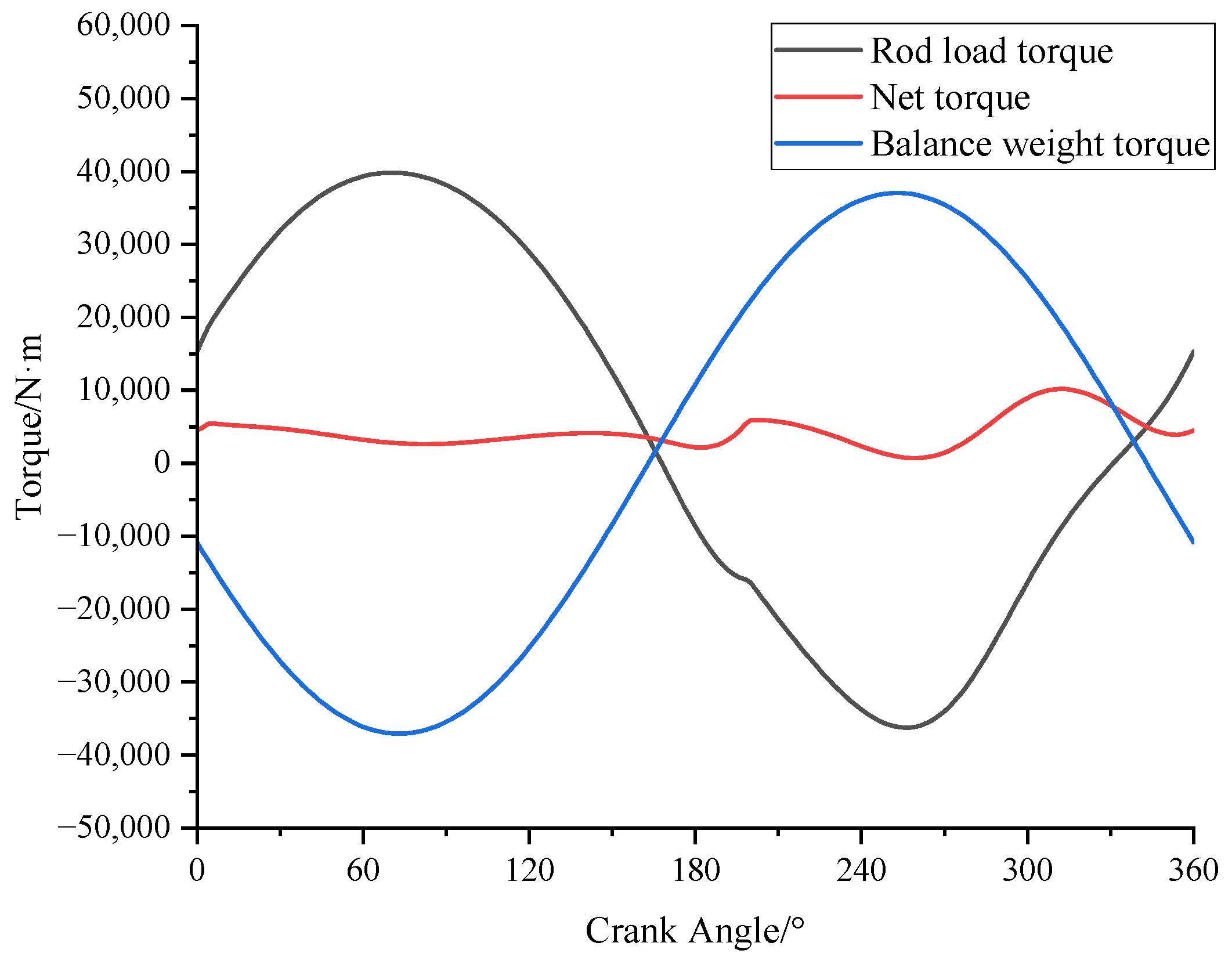
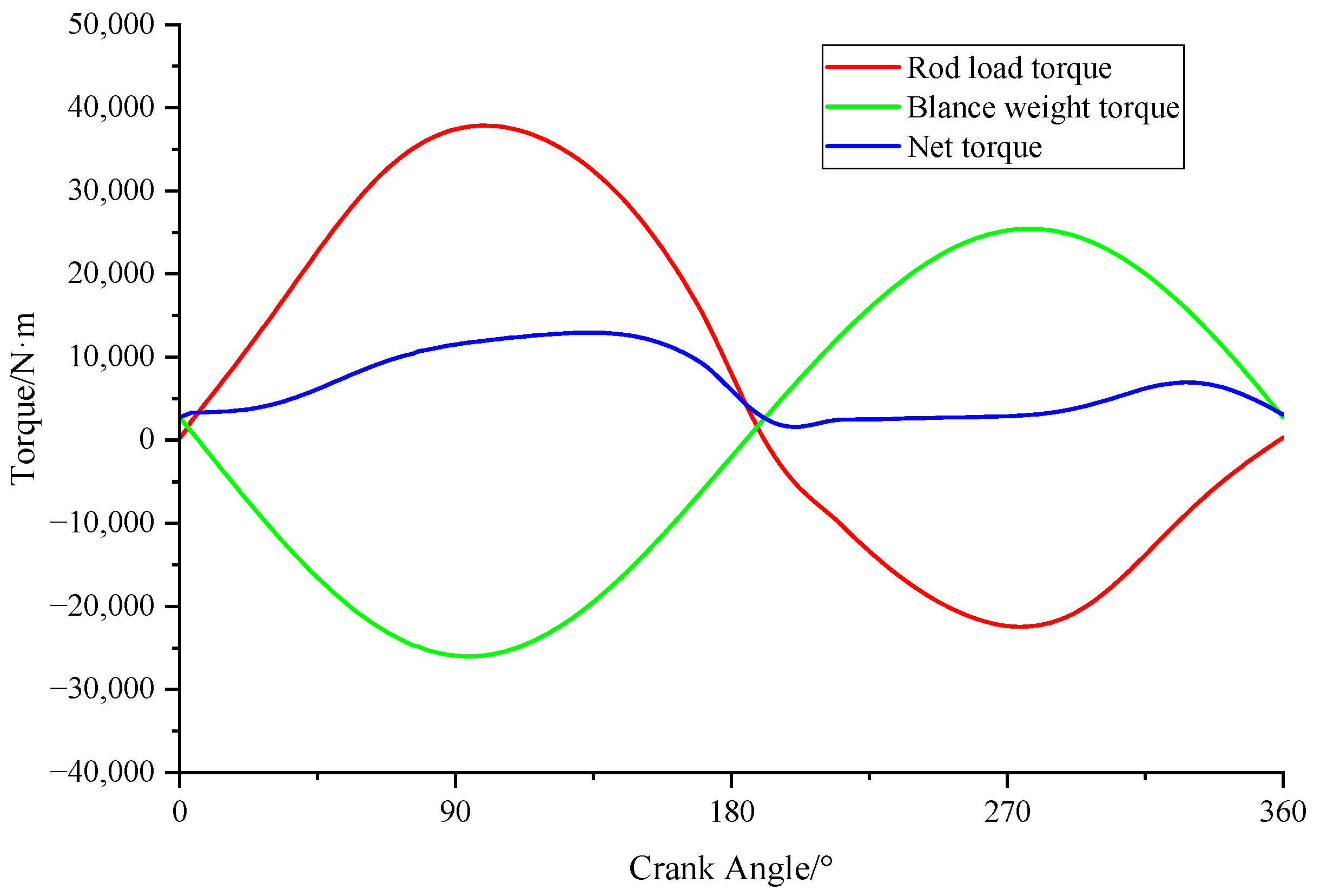
5.2.1. Analysis of Torque Superposition
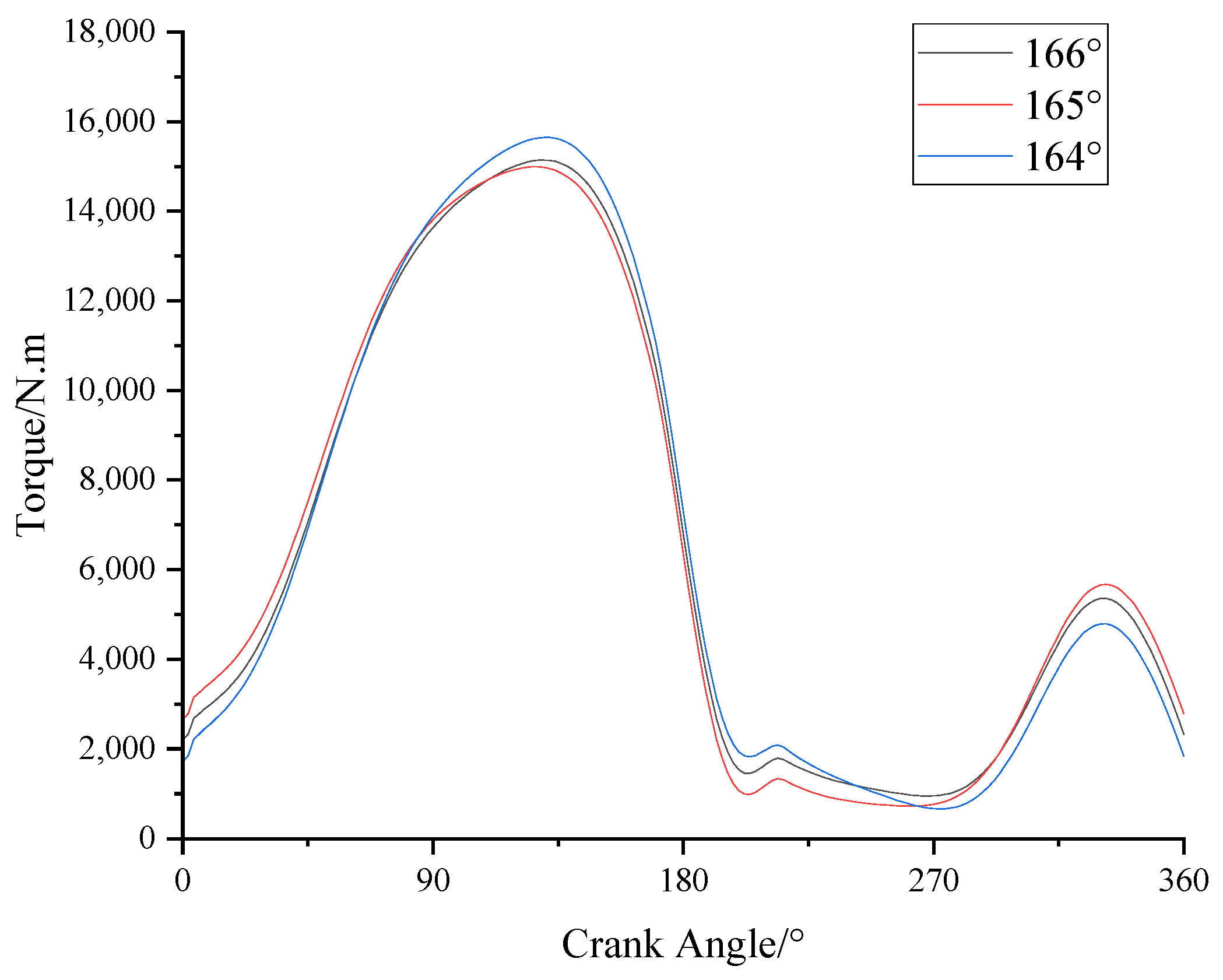
5.2.2. Analysis of Balance Crank Angle λ
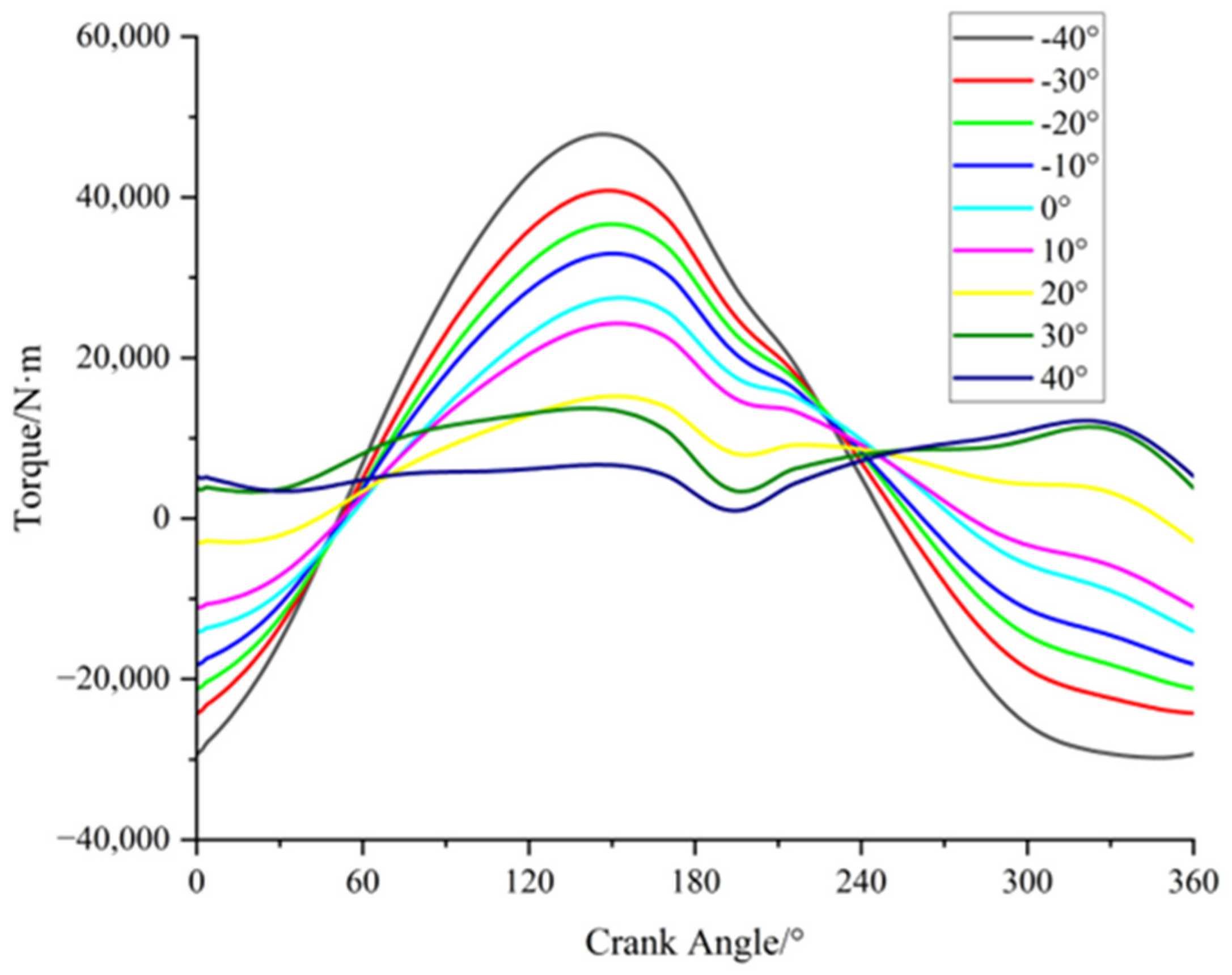
5.2.3. Analysis of Counterweight Center of Mass Offset Angle δ
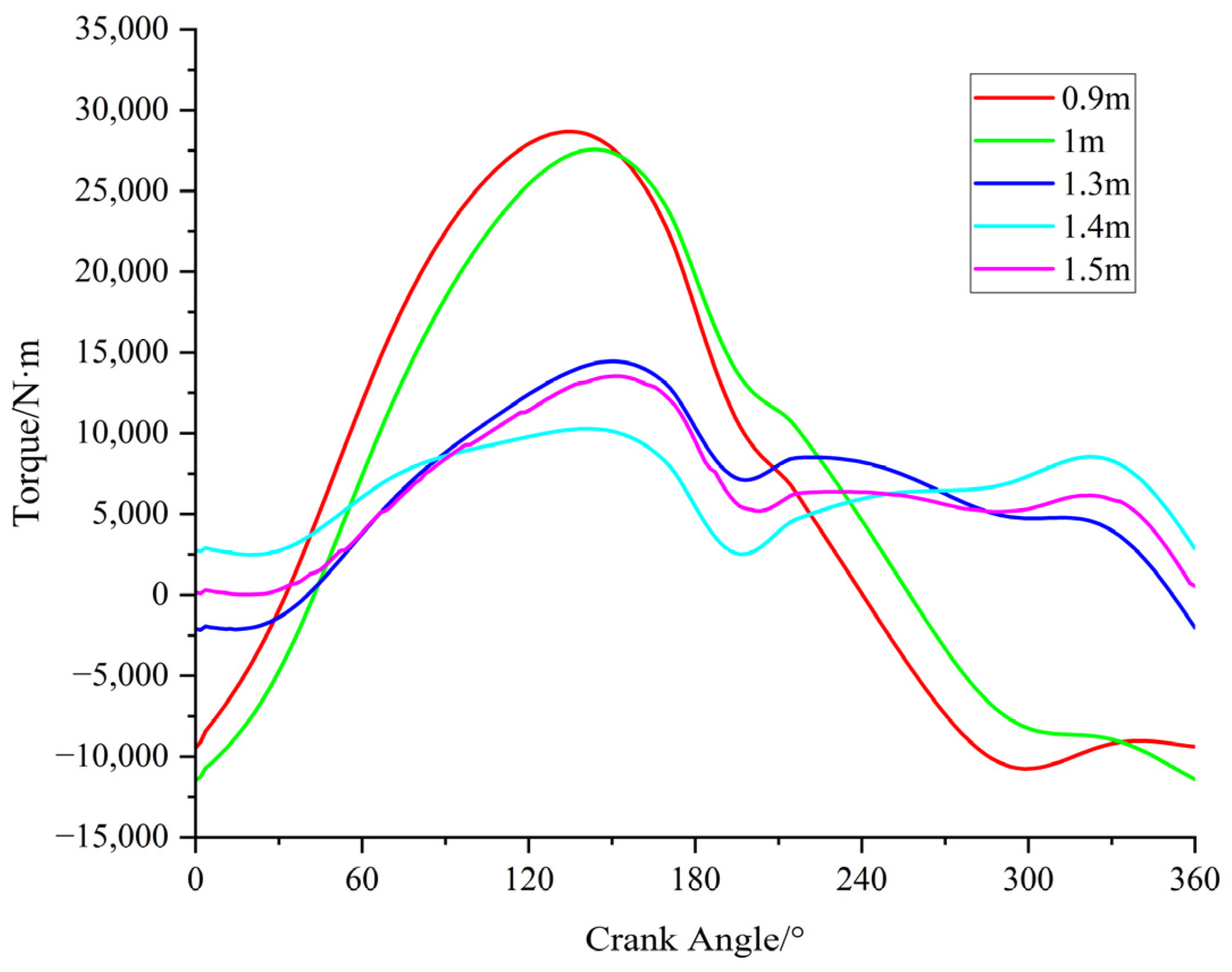
5.2.4. Analysis of the Radius of Counterweight Center of Mass
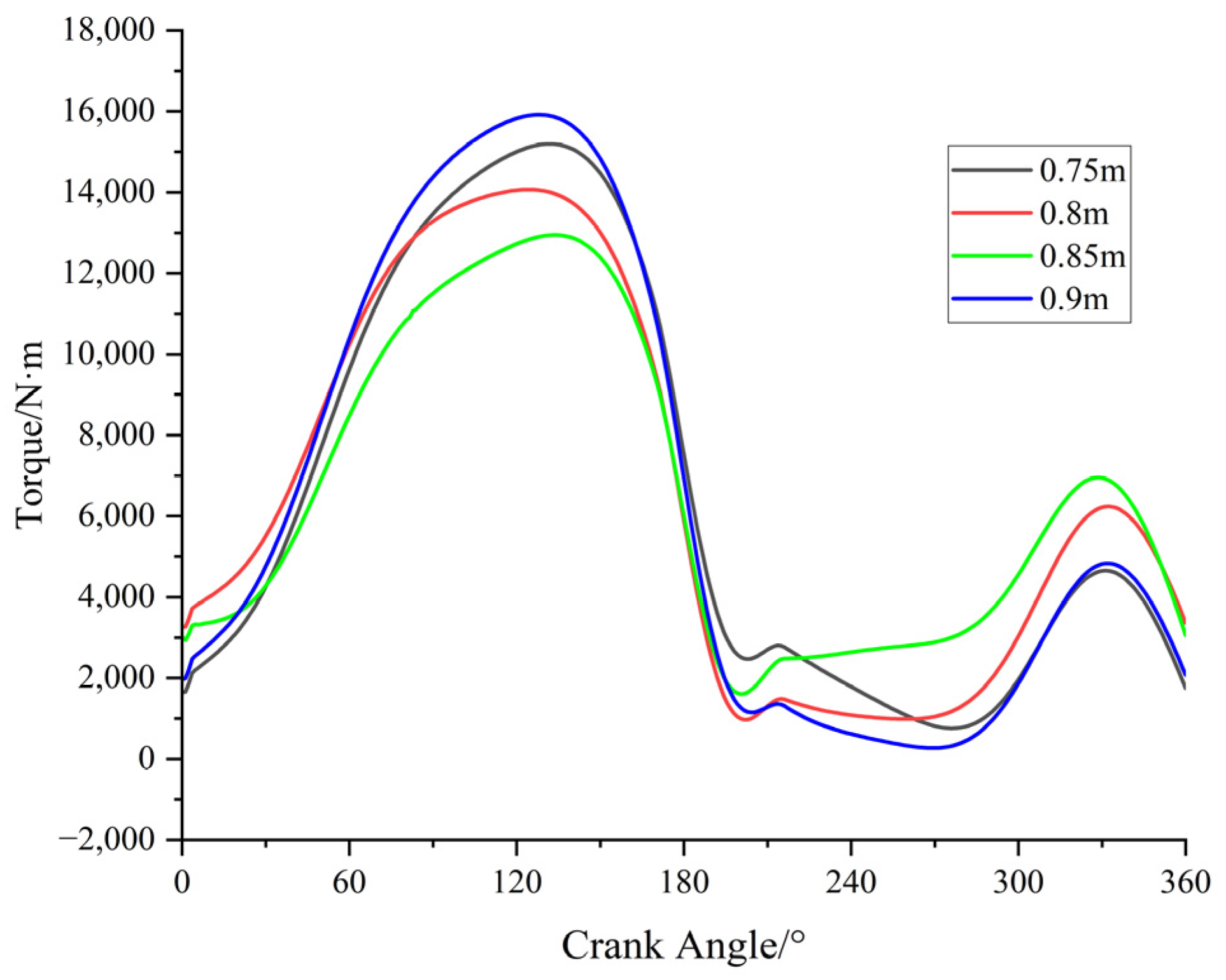
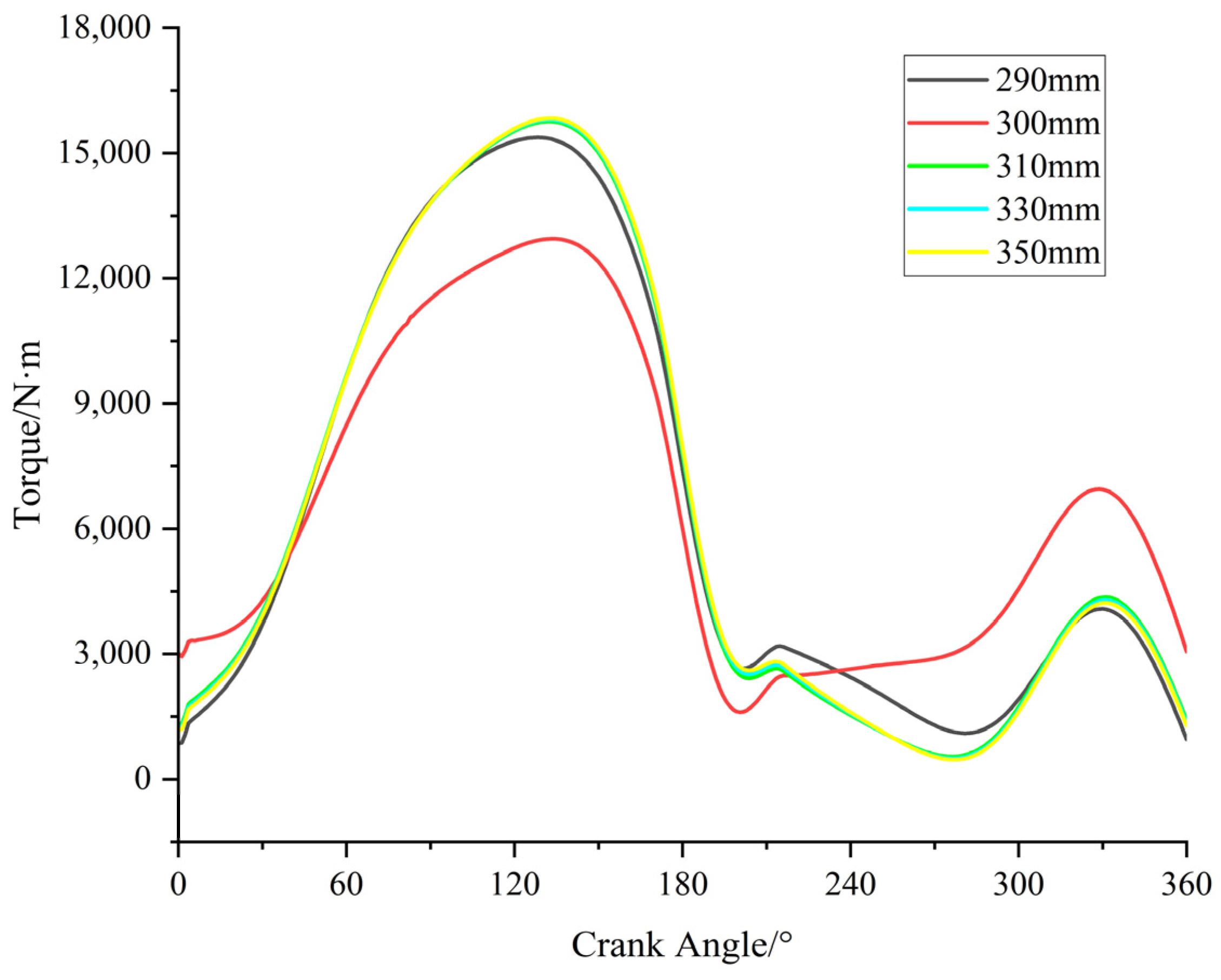
5.2.5. Analysis of Crank Length of Moving Pulley and Connecting Rod of Moving Pulley
5.2.6. Optimal Parameters of Eccentric Balanced Pumping Unit Model
6. Indoor Test and Field Application
6.1. Indoor Test
- (1)
- By changing the radius of rotation of the movable pulley and related devices, whether the change in the stroke and pumping speed of the pumping unit achieves the expected goal is verified, and the basic structural parameters and the degree of simplicity of operation are tested.
- (2)
- The stiffness of the pump unit is tested by varying parameters such as the polished rod load, stroke and pumping speed to verify that parameters such as the vibration, noise and maximum allowable load of the pump unit meet the design objectives.
- (3)
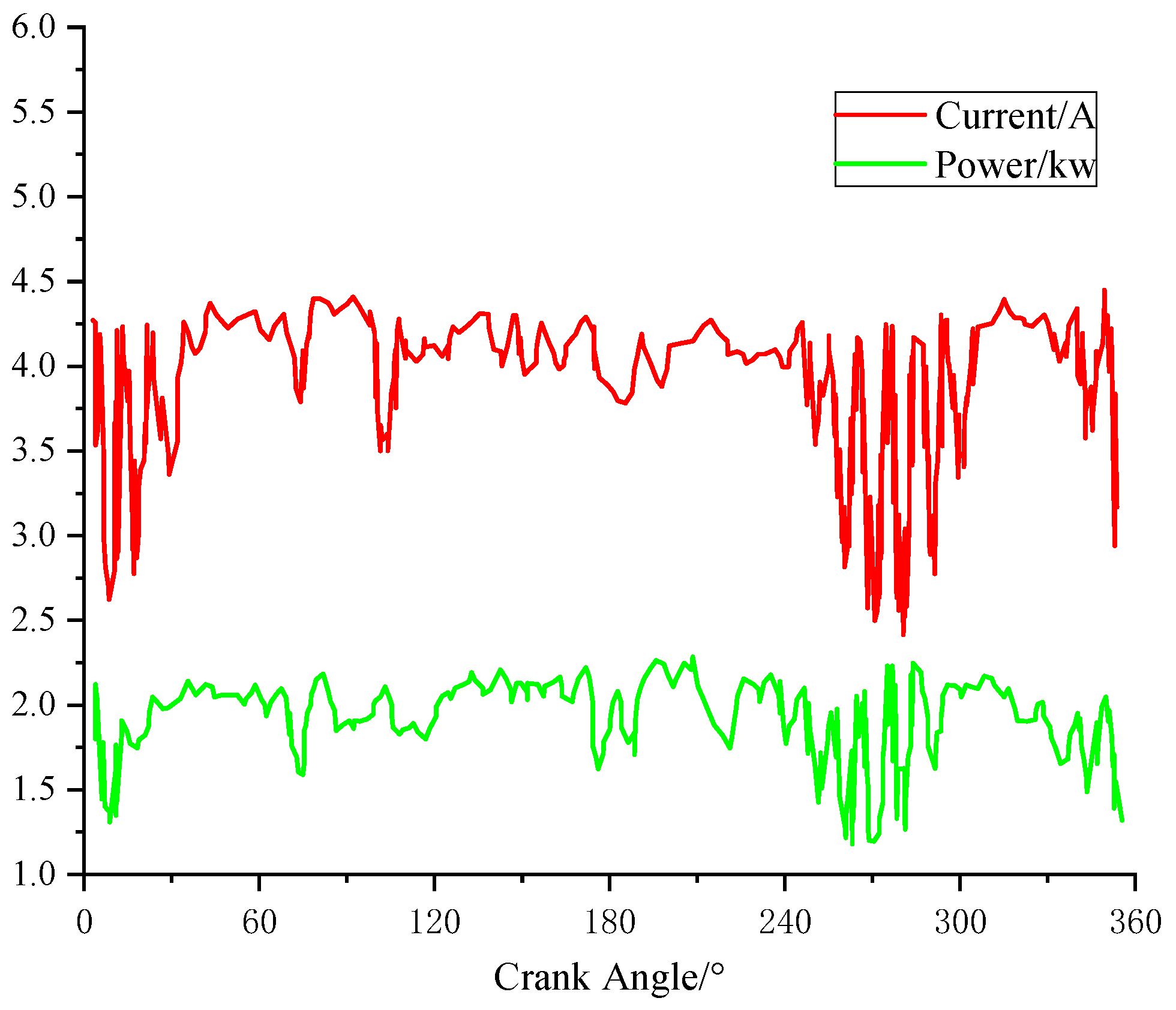
- By detecting the change rule of the pumping machine power and current and other parameters under different working conditions, the electrical parameters are tested to verify the correctness of the principle of eccentric balance.
- (4)
- Wear testing is conducted on the pumping unit mainly for noise and reducer oil temperature.
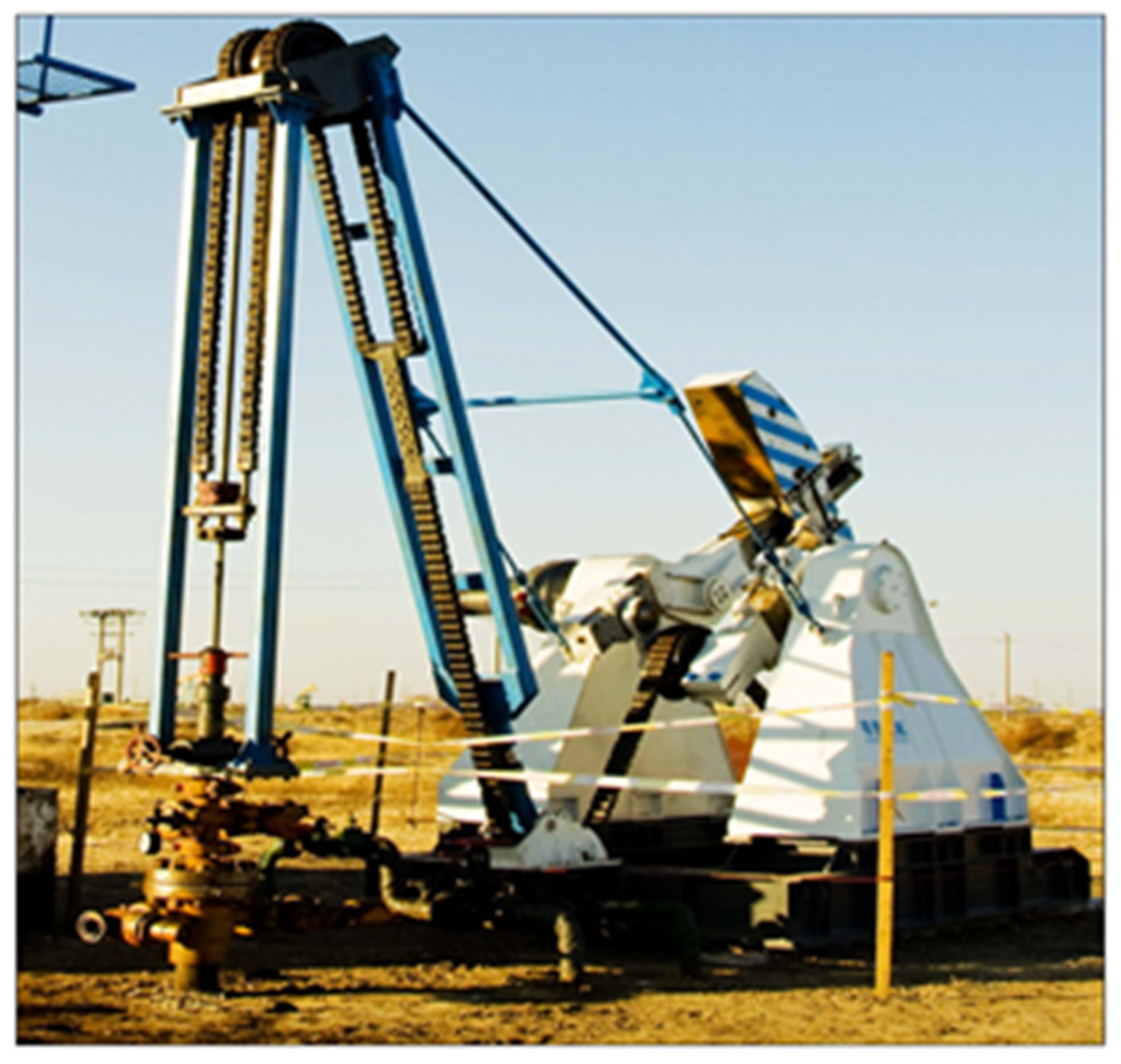
6.1.1. Laboratory Equipment
6.1.2. Analysis of Stability Test Results
6.1.3. Analysis of Electrical Parameter Test Results
6.2. Field Application
7. Conclusions
- (1)
- The eccentric balanced positive torque pumping unit was designed to use a flexible energy transfer system instead of a rigid structure, which can greatly reduce the energy transfer links and energy loss. In addition, the eccentric rotating mechanism was used to change the work range of the polished rod load. This caused the upstroke interval to increase and the downstroke interval to decrease. So, the net torque fluctuation was reduced and the net torque was positive when the counterweight torque was supplemented with the polished rod load torque.
- (2)
- The kinematic and dynamic analysis model of the eccentric balanced pumping unit was established, and theoretical calculations and analyses of the kinematics and dynamics were carried out, and these proved that the pumping unit achieves full-cycle positive torque operation. In addition, the ratio of the maximum torque to minimum torque was 14.3, which reduced the torque fluctuation range.
- (3)
- The simulation analysis of the eccentric balanced pumping unit with ADAMS verifies that, in the theoretical analysis, the pumping unit can achieve positive torque work. In addition, the key parameters of the pumping unit affecting the balancing effect such as the balance crank angle λ and the counterweight center of mass offset angle δ were optimized, so it was determined that the optimal selection of the angle λ was 165°, and the optimal selection of the offset angle δ was 30°.
- (4)
- After the indoor testing and field application of the eccentric balanced positive torque pump unit, it is obvious that the design principle of the pumping unit is feasible, the working performance of the pumping unit is reliable, the installed power is reduced by 80%, the weight of the entire prototype is decreased 25%, the working efficiency can reach up to 24.3% and the electricity savings reached more than 50%. So, the pumping unit can effectively improve system efficiency and oil production efficiency.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Badoiu, D.; Toma, G. Research concerning the identification of some parameters of a sucker rod pumping unit. Rev. Chim. 2017, 68, 2289–2292. [Google Scholar] [CrossRef]
- Bhatkar, S.; Anwar, S.O. Optimizing crude oil production in Sucker Rod Pumping wells using QRod Simulator. Adv. Eng. Appl. Sci. Int. J. 2013, 3, 1–4. [Google Scholar]
- Takacs, G. Sucker-Rod Pumping Handbook: Production Engineering Fundamentals and Long-Stroke Rod Pumping; Gulf Professional Publishing: Houston, TX, USA, 2015. [Google Scholar]
- Toma, G. Research concerning the optimization of the mechanism of the conventional sucker rod pumping units. Rev. Chim. 2019, 70, 1795–1799. [Google Scholar] [CrossRef]
- Enikeeva, E.R.; Alaeva, N.N. Analysis of Operation and Ways to Improve the Efficiency of the Pumping Unit. In Proceedings of the 2023 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 15–19 May 2023; IEEE: New York, NY, USA, 2023; pp. 1–5. [Google Scholar]
- Xing, M.; Dong, S. A new simulation model for a beam-pumping system applied in energy saving and resource-consumption reduction. SPE Prod. Oper. 2015, 30, 130–140. [Google Scholar] [CrossRef]
- Liu, J.; Zhu, J. Design research on working mechanism of beam pumping unit. Appl. Mech. Mater. 2010, 37, 340–343. [Google Scholar] [CrossRef]
- Yan, W.; Yin, S.; Du, J. The Development Process of Pumping Unit and Innovation of Pumping Mode. Mech. Eng. 2007, 3, 111–112. [Google Scholar] [CrossRef]
- Feng, Z.; Guo, C.; Zhang, D.; Cui, W.; Tan, C.; Xu, X.; Zhang, Y. Variable speed drive optimization model and analysis of comprehensive performance of beam pumping unit. J. Pet. Sci. Eng. 2020, 191, 107155. [Google Scholar] [CrossRef]
- Ye, Z.; Liu, Z.; Cheng, C.; Tan, L.; Feng, K. Efficient evaluation model of beam pumping unit based on principal component regression analysis. Sci. Prog. 2020, 103, 0036850419895769. [Google Scholar] [CrossRef] [PubMed]
- Busarov, S.S.; Busarov, I.S.; Titov, D.S. Studies of the Effect of Leaks of the Working Chamber on the Working Process of Long-Stroke Ultra-Low-Speed Piston Compressor and Pump Units. Chem. Pet. Eng. 2019, 55, 480–485. [Google Scholar] [CrossRef]
- Cai, W.; Li, W. Finite element analysis and application of a chain pumping unit frame. Chem. Technol. Fuels Oils 2022, 58, 200–208. [Google Scholar] [CrossRef]
- Ren, T. Scheme design and performance analysis of a new chain drive pumping unit. Xi’an Univ. Pet. (Nat. Sci.) 2009, 24, 72–74. [Google Scholar]
- Shao, J.; Ding, K.; Wang, D. Kinematics Analysis of Incomplete Gear and Rack Pumping Unit. J. Phys. Conf. Ser. 2021, 2095, 012090. [Google Scholar] [CrossRef]
- Mourlevat, J. Long-stroke pump boosts heavy oil recovery. World Oil (United States) 1982, 195, 83–87. [Google Scholar]
- Kennedy, D.M.; Ghareeb, M. Ultra-long stroke and intelligent rod pumping system for producing difficult wells and/or fluids. In Proceedings of the SPE Asia Pacific Oil and Gas Conference and Exhibition, Jakarta, Indonesia, 17–19 October 2017; SPE: Kuala Lumpur, Malaysia, 2017; p. D011S003R003. [Google Scholar]
- Liu, Y.; Wu, L.; Wei, Y.; Dong, C. Study on Test of Characteristics of a New Drum Pumping Unit. J. Southwest Pet. Univ. (Nat. Sci. Ed.) 2022, 44, 174–180. [Google Scholar]
- Feng, G. Belt-driven oil pumping machine. Pet. Mach. 1986, 7, 24. [Google Scholar]
- Tse, R.; Wu, L. Research on the Technology of Elasticity Tension Device for Belt Drive Used in Pumping Unit of Oil Field. Mech. Transm. 2013, 37, 72–74. [Google Scholar] [CrossRef]
- Tan, C.; Tan, P.; Li, X.; Wu, H.; Yang, R. Research on flexible variable-speed control model and optimization method of rod pumping well based on genetic algorithm. In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017; IEEE: New York, NY, USA, 2017; pp. 1771–1774. [Google Scholar]
- Li, J.; Yang, H.Z.; Han, M.; Xu, J.C.; Li, X.D.; Han, X.T.; Cheng, Y.F. Study on single crank flexible pumping unit in oil field artificial lift. Appl. Mech. Mater. 2011, 66, 471–476. [Google Scholar] [CrossRef]
- Sapietová, A.; Sekerka, M.; Vaško, M.; Sapieta, M. Synthesis of a pumping unit with consideration of a flexible member in the system. Advances in Science and Technology. Res. J. 2016, 10, 119–123. [Google Scholar]
- Xu, C.; Wang, Y.; Wu, Y.; Zhang, S. Research on Flexible Control Technology of Pumping Unit. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; IEEE: New York, NY, USA, 2022; pp. 208–213. [Google Scholar]
- Fu, H.; Zou, L.; Wang, Y.; Feng, Z.; Song, Z. Study on design and simulation analysis of the double horse-head pumping unit based on the compound balance structure. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 3034–3046. [Google Scholar] [CrossRef]
- Sun, W.; Li, C.; Tao, Q.; Tan, Y. The design and simulation of beam pumping unit. In Proceedings of the 2015 21st International Conference on Automation and Computing (ICAC), Glasgow, UK, 11–12 September 2015; IEEE: New York, NY, USA, 2015; pp. 1–4. [Google Scholar]
- Yang, X. Analysis of horsehead strength calibration of double donkey head pumping machine. Shandong Ind. Technol. 2018, 7, 89+137. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Li, H.; Wang, L. Experimental research on parameters of a late-model hydraulic-electromotor hybrid pumping unit. Math. Probl. Eng. 2020, 2020, 2923154. [Google Scholar] [CrossRef]
- Qu, W.T.; Liao, D.S.; Ren, T.; Sun, W. Optimum design of double-well pumping units based on calculation of MATLAB optimization toolboxes. Adv. Mater. Res. 2012, 479, 694–698. [Google Scholar] [CrossRef]
- Zhou, Q.Y.; Zheng, Z.J.; Ji, L.; Yan, Y. Frame mechanics analysis of tower long-stroke pumping unit. West. Explor. Eng. 2011, 23, 51–54. [Google Scholar]
- Xu, J.; Li, W.; Meng, S. Kinematic and Dynamic Simulation Analysis of Modified Conventional Beam Pumping Unit. Energies 2022, 15, 5496. [Google Scholar] [CrossRef]
- Xu, J.; Meng, S. Design and application of eccentric balance flexible pumping unit. IOP Conf. Ser. Earth Environ. Sci. 2019, 267, 032033. [Google Scholar]
- Aditsania, A.; Rahmawati, S.D.; Sukarno, P.; Soewono, E. Modeling and simulation performance of sucker rod beam pump. AIP Conf. Proc. 2015, 1677, 080008. [Google Scholar]
- Ahmedov, B. Assessment of dynamic efforts taking into account of inertial and vibrating loads in deaxial pumping units. J. Pet. Explor. Prod. Technol. 2020, 10, 1401–1409. [Google Scholar] [CrossRef]
- Aliev, F.A.; Dzhamalbekov, M.A.; Veliev, N.A.; Gasanov, I.R.; Alizade, N.A. Computer simulation of crude oil extraction using a sucker rod pumping unit in the oil well–resevoir system. Int. Appl. Mech. 2019, 55, 332–341. [Google Scholar] [CrossRef]
- Heinze, L. A Computational Method for Planar Kinematic Analysis of Beam Pumping Units. ASME J. Energy Resour. Technol. Pet. Div. ASME 2007, 129, 300–306. [Google Scholar]
- Jiang, S.; Yang, X.; Yan, X.; Li, B. Simulation analysis on a sort of beam-pumping unit with new balance methods. Acta Pet. Sin. 2005, 26, 117–120. [Google Scholar]
- Qi, Y.; Liu, J.; Xiao, S.; Wang, Z. Analysis of kinetic and dynamic characteristics of pumping unit with crown sheave. China Pet. Mach. 2000, 28, 7–10. [Google Scholar]
- Sadov, V.B. Simulating operation of sucker rod pumping unit (Russian). Oil Ind. J. 2019, 2019, 70–74. [Google Scholar]
- Toma, G.; Pupăzescu, A.; Bădoiu, D. On the Kinematics of Some Sucker Rod Pumping Units. Pet.-Gas Univ. Ploiesti Bull. Tech. Ser. 2014, 66, 95. [Google Scholar]
- Takacs, G. Exact kinematic and torsional analysis of Rotaflex pumping units. J. Pet. Sci. Eng. 2014, 115, 11–16. [Google Scholar] [CrossRef]
- Yi, L.; Leinonen, T. Kinematic and dynamic simulation of a dual-beam pumping unit for increasing stroke and reducing force. J. Energy Resour. Technol. 2004, 126, 320–325. [Google Scholar] [CrossRef]
- Takacs, G.; Belhaj, H. Latest technological advances in rod pumping allow achieving efficiencies higher than with ESP systems. J. Can. Pet. Technol. 2011, 50, 53–58. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part Name | Quantity | Mass (kg) | |
|---|---|---|---|
| Single | Total | ||
| Balance crank | 1 | 869.2 | 869.2 |
| Counterweight | 2 | 492.6 | 985.2 |
| Pulley connecting rod | 3 | 29.5 | 29.5 |
| Pulley | 3 | 107.8 | 323.4 |
| Balance support | 2 | 6367.3 | 12,734.6 |
| Movable pulley handle | 1 | 238.3 | 238.3 |
| Main engine base | 1 | 19,781.2 | 237.4 |
| Offset Angle/° | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| −40° | 0.18 | 4.06 | 2.18 |
| −30° | 0.43 | 4.31 | 2.18 |
| −20° | 0.58 | 4.46 | 2.18 |
| −10° | 0.73 | 4.56 | 2.18 |
| 0° | 0.93 | 4.76 | 2.18 |
| 10° | 1.08 | 4.81 | 2.18 |
| 20° | 1.13 | 4.91 | 2.18 |
| 30° | 1.36 | 5.02 | 2.18 |
| 40° | 1.64 | 5.16 | 2.18 |
| Radius (m) | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| 0.9 | 0.96 | 4.34 | 2.29 |
| 1 | 1.06 | 4.54 | 2.29 |
| 1.3 | 1.16 | 4.74 | 2.29 |
| 1.4 | 1.36 | 5.02 | 2.29 |
| 1.5 | 1.52 | 5.15 | 2.29 |
| Key Parameter | Optimal Value of Parameter |
|---|---|
| The balance crank angle δ | 165° |
| The counterweight center of mass offset angle λ | 30° |
| Rotating radius of counterweight center of mass of | 1.4 m |
| Counterweight | 1500 kg |
| Length of moving pulley handle | 0.85 m |
| Length of rotary pulley connecting rod | 300 mm |
| Working Condition | Testing Items | Standard Value | Measured Value | Test Condition |
|---|---|---|---|---|
| Polished rod load: 15.20 kN Stroke: 2 m Pumping speed: 3 min−1 Motor power: 3 kW | Longitudinal amplitude at the top of bracket/mm | ≤3 | 1.6 |
|
| Lateral amplitude at the top of bracket/mm | ≤2 | 1.2 | ||
| Bearing temperature of reducer/°C | ≤70 | 30.5 | ||
| Temperature rise of reducer bearing/°C | ≤40 | 10.4 | ||
| Reducer oil pool temperature/°C | ≤70 | 29.2 | ||
| Reducer oil pool temperature rise/°C | ≤15 | 7.5 | ||
| Operation noise of the whole machine/dB | ≤85 | 78.4 |
| Well Depth/m | Stroke/m | Pumping Speed/min−1 | Counterweight /kg | Balance Radius/m | Wellhead Pressure /MPa | Current/A | Power /kW | Displacement /L/min−1 |
|---|---|---|---|---|---|---|---|---|
| 70 | 2 | 3 | 630 | 1.4 | 3 | Imin = 1.96 | Pmin = 1.04 | 23.7 |
| Imax = 4.00 | Pmax = 2.36 | |||||||
| 2.5 | Imin = 1.43 | Pmin = 0.92 | ||||||
| Imax = 3.80 | Pmax = 2.31 | |||||||
| 2 | Imin = 1.60 | Pmin = 0.97 | ||||||
| Imax = 3.92 | Pmax = 2.36 |
| Well Depth (m) | Pump Size (mm) | Stroke (m) | Pumping Speed (min−1) | Submergence (m) | Theoretical Displacement (m3/d) | Daily Liquid Production (t/d) | Daily Oil Production (t/d) | Water Cut (%) | Tubing Pressure (MPa) | Casing Pressure (MPa) |
|---|---|---|---|---|---|---|---|---|---|---|
| 880 | 38 | 2.5 | 4 | 60.13 | 16.3 | 5.44 | 0.6 | 89.15 | 0.46 | 0.42 |
| Type | Stroke (m) | Pumping Speed (min−1) | Pump Size (mm) | Maximum/Minimum Torque (kN·m) | Installed Power (kW) | Power Consumption per Ton of Liquid (kW·h) | System Efficiency (%) |
|---|---|---|---|---|---|---|---|
| Eccentric pumping unit | 2.5 | 4 | 38 | 25/7 | 3 | 1.5 | 24.3 |
| Beam pumping unit | 2.5 | 4 | 38 | 65/−15 | 15 | 3.3 | 14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, W.; Li, W.; Zhu, Q.; Lu, H. Kinematic and Dynamic Analysis of Eccentric Balanced Positive Torque Pumping Unit. Machines 2024, 12, 240. https://doi.org/10.3390/machines12040240
Xu J, Wang W, Li W, Zhu Q, Lu H. Kinematic and Dynamic Analysis of Eccentric Balanced Positive Torque Pumping Unit. Machines. 2024; 12(4):240. https://doi.org/10.3390/machines12040240
Chicago/Turabian StyleXu, Jinchao, Wensong Wang, Wei Li, Qijun Zhu, and Hui Lu. 2024. "Kinematic and Dynamic Analysis of Eccentric Balanced Positive Torque Pumping Unit" Machines 12, no. 4: 240. https://doi.org/10.3390/machines12040240
APA StyleXu, J., Wang, W., Li, W., Zhu, Q., & Lu, H. (2024). Kinematic and Dynamic Analysis of Eccentric Balanced Positive Torque Pumping Unit. Machines, 12(4), 240. https://doi.org/10.3390/machines12040240