


Research on the Control Method of a Brushless DC Motor Based on Second-Order Active Disturbance Rejection Control


Abstract
:1. Introduction
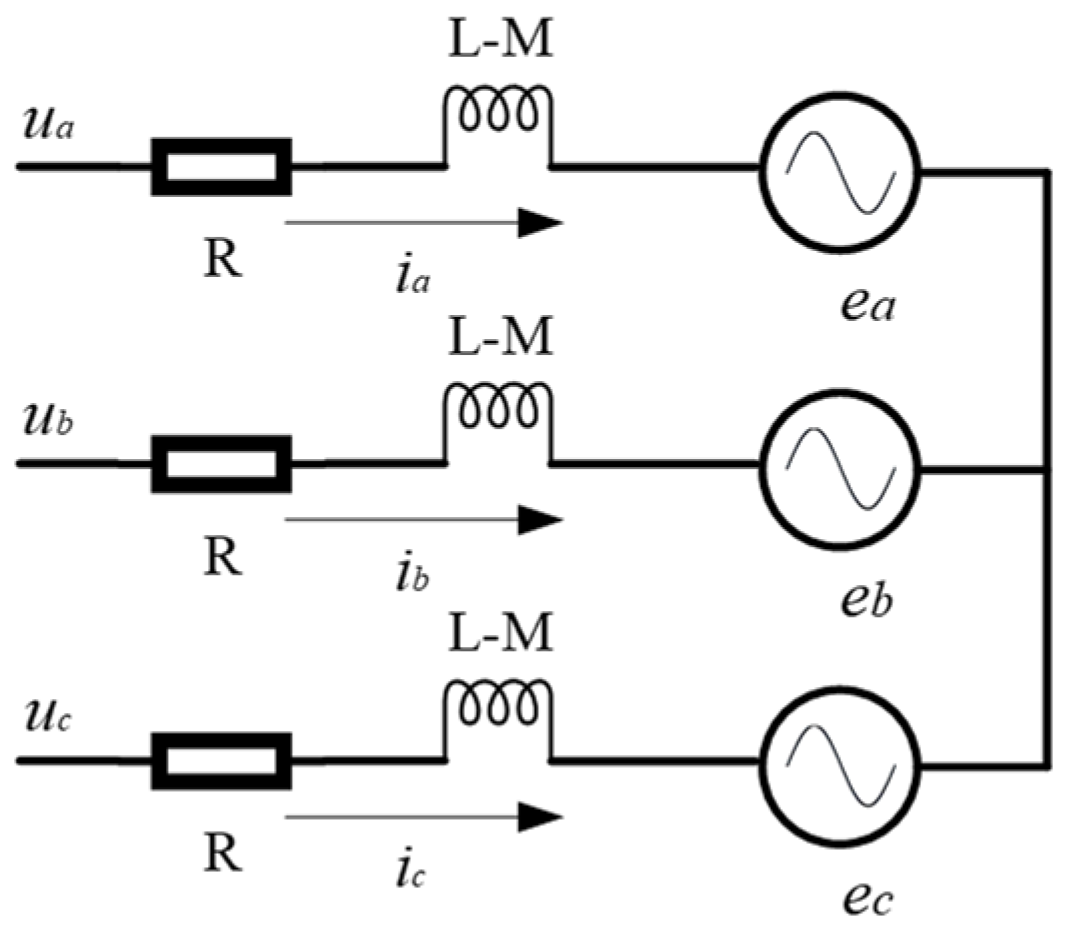
2. Mathematical Model of BLDC
3. Second-Order ADRC Construction of the BLDC Speed Loop
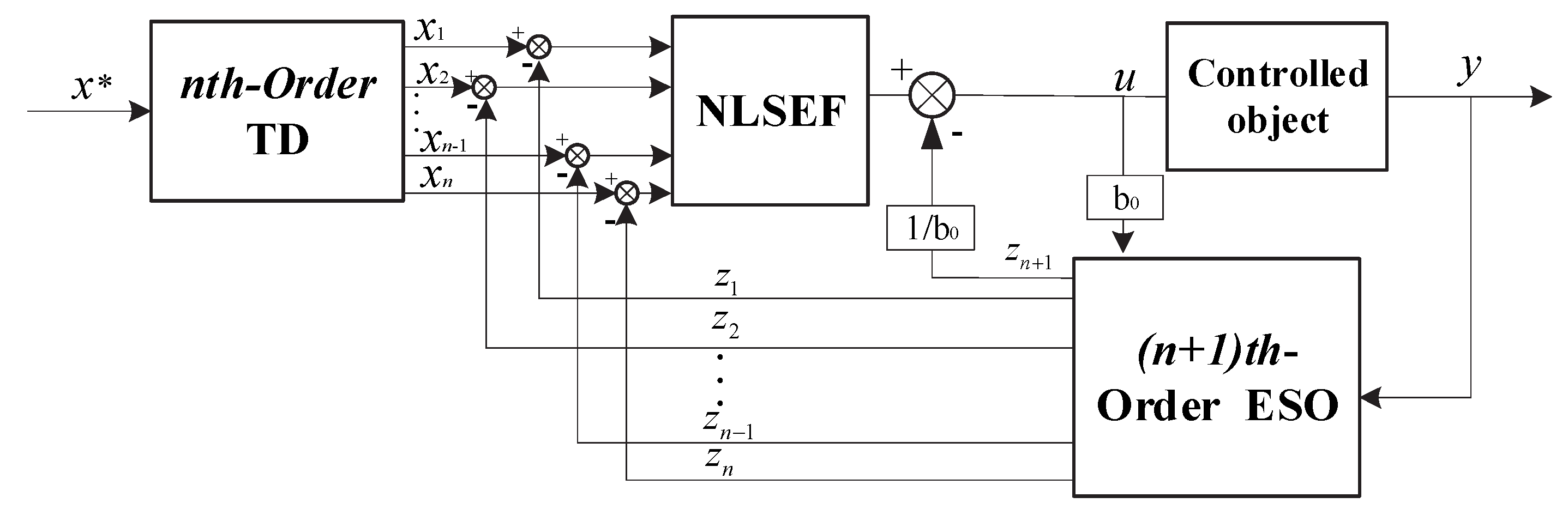
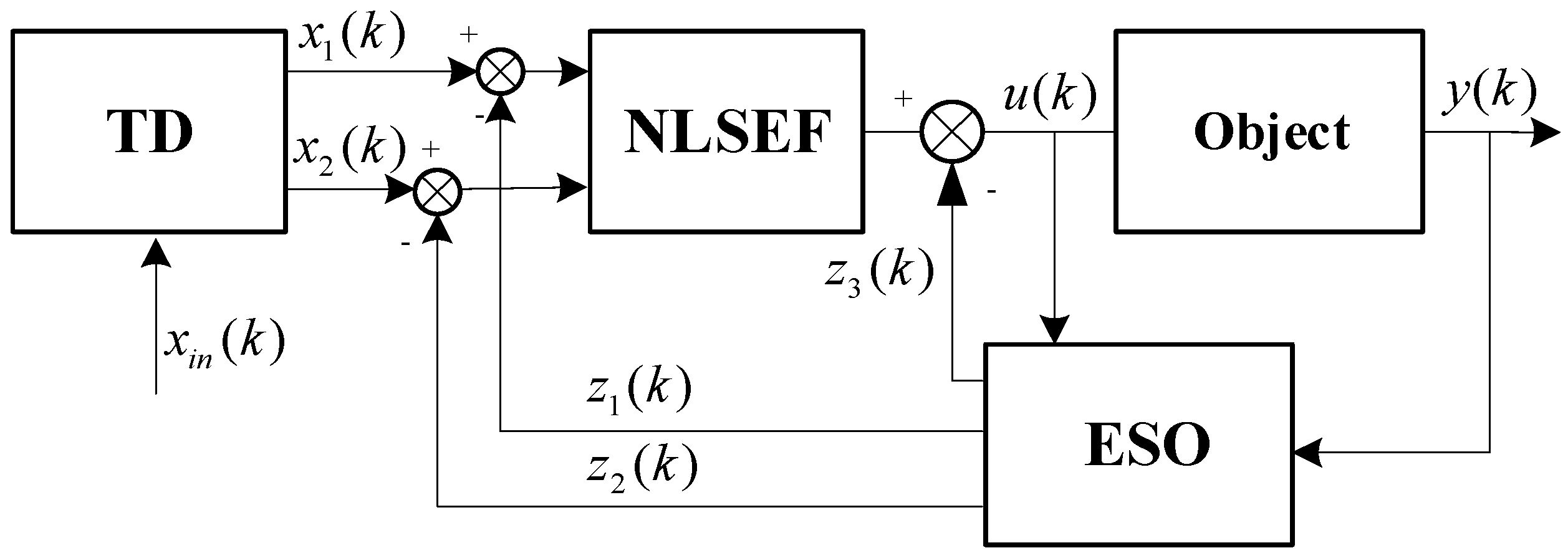
3.1. Second-Order ADRC Control Principle
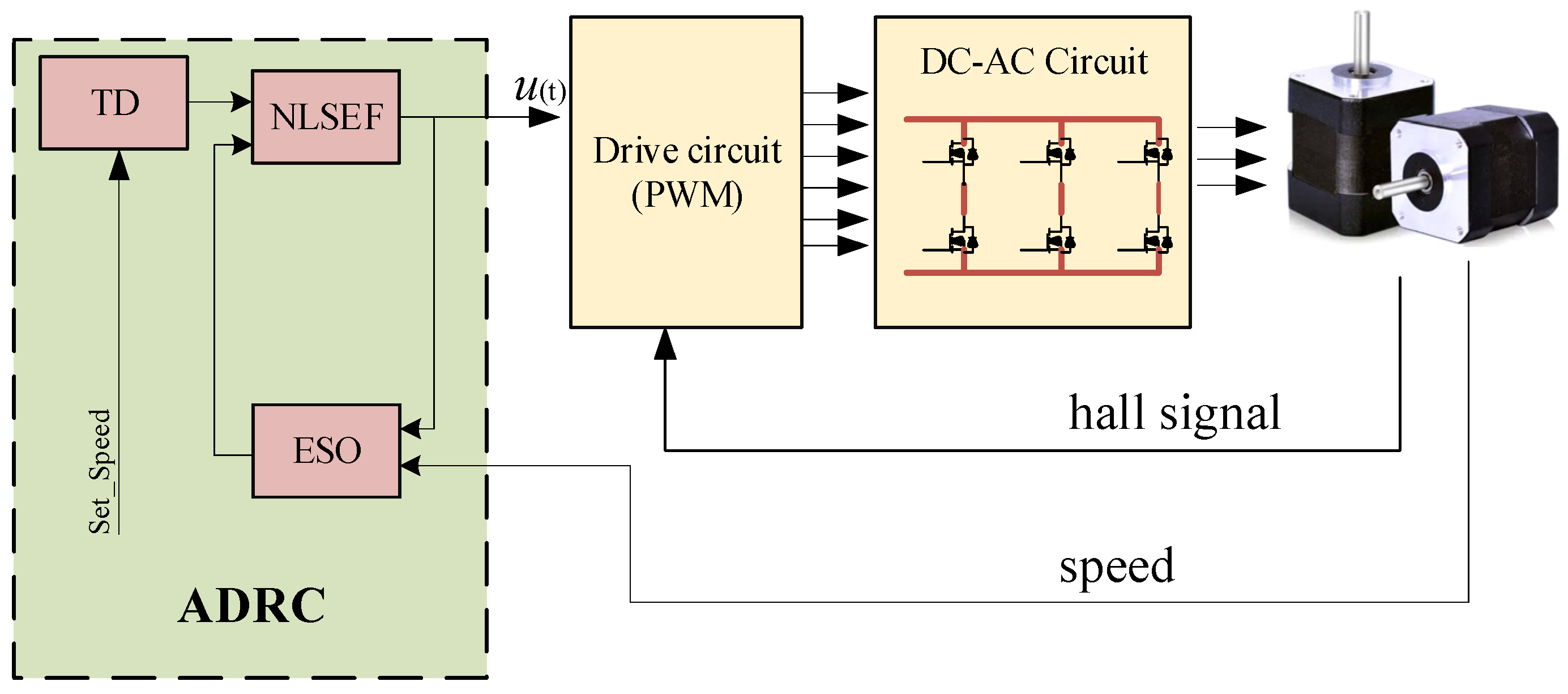
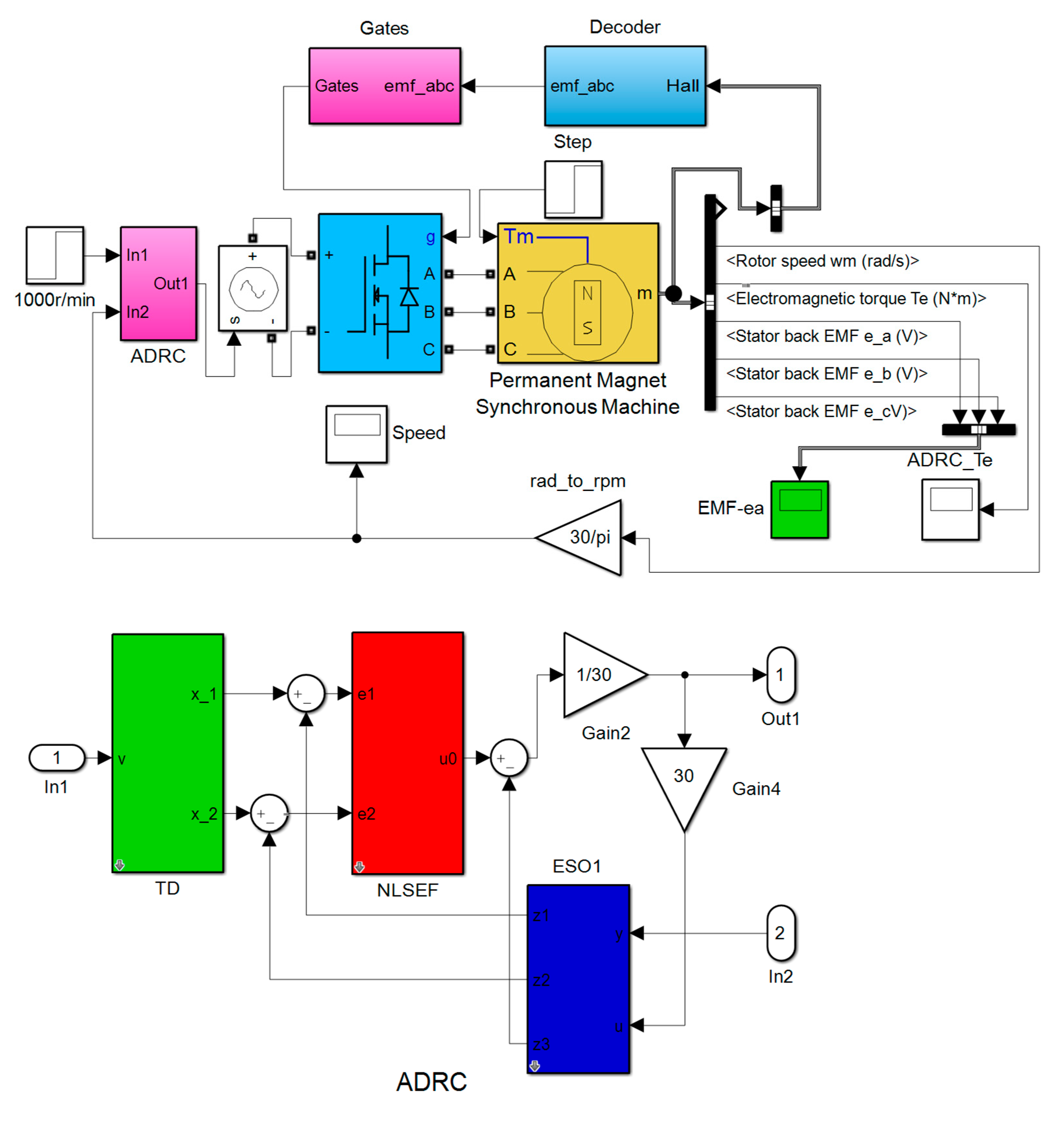
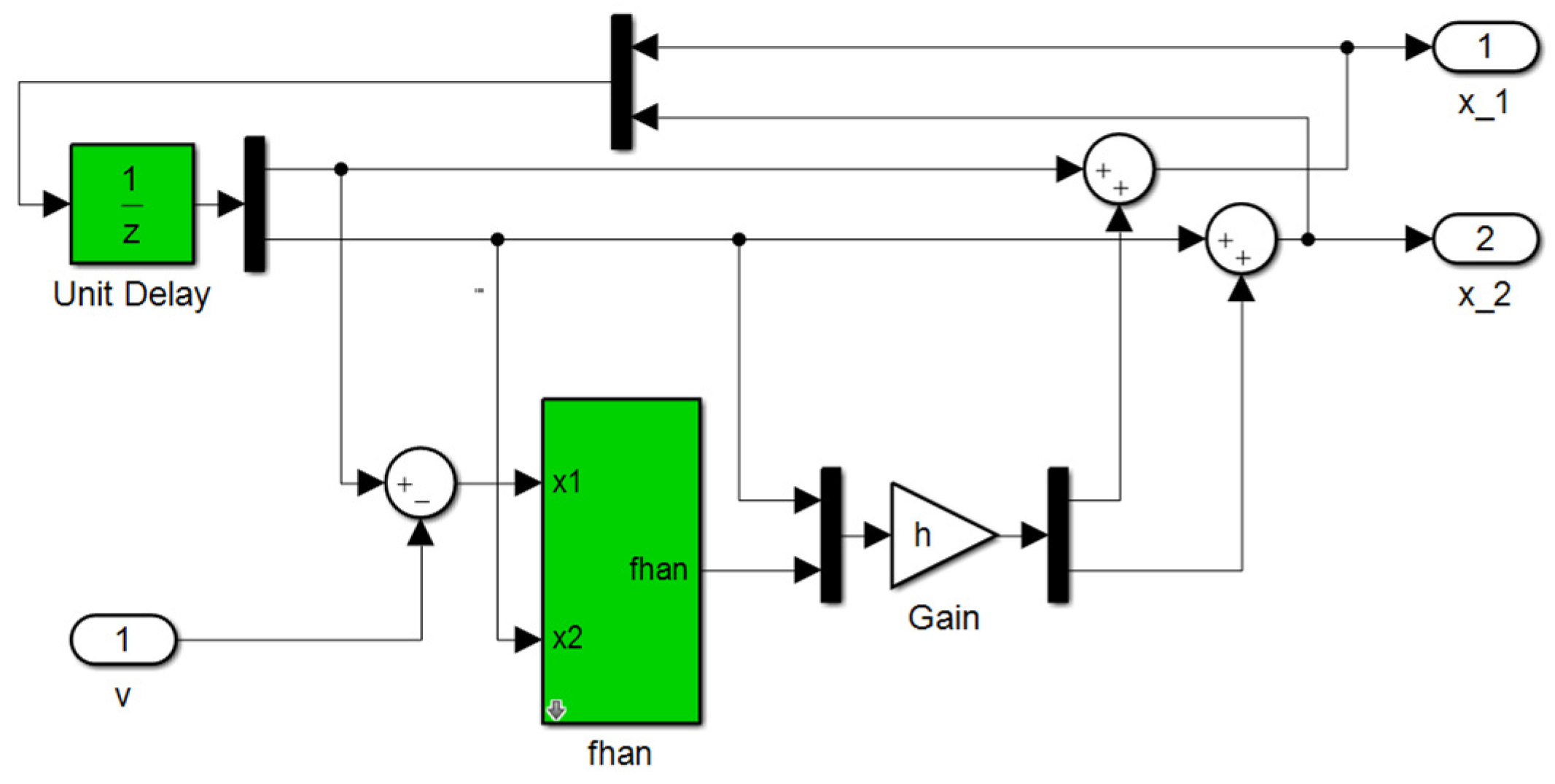
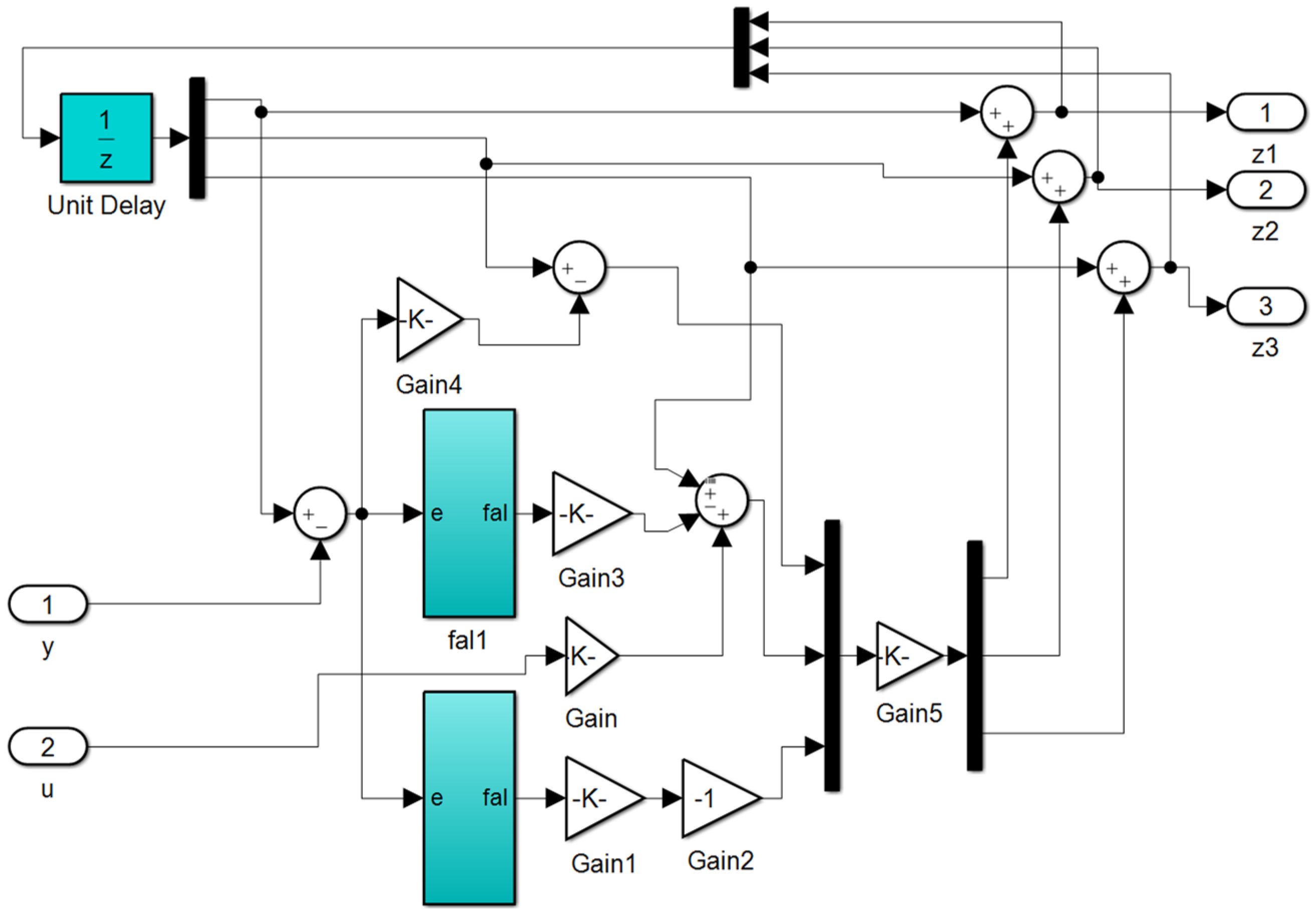
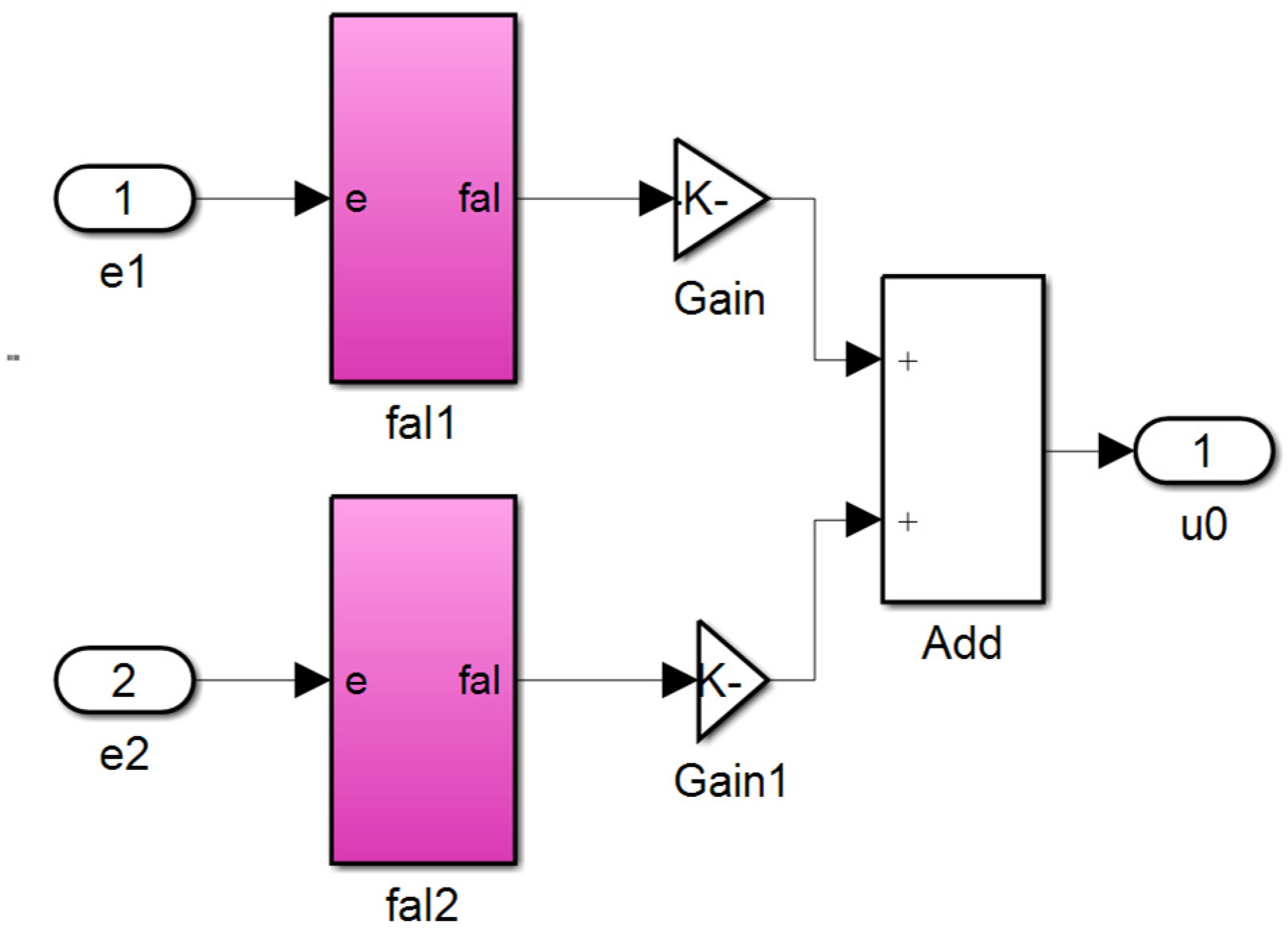
3.2. Speed Loop Second-Order ADRC
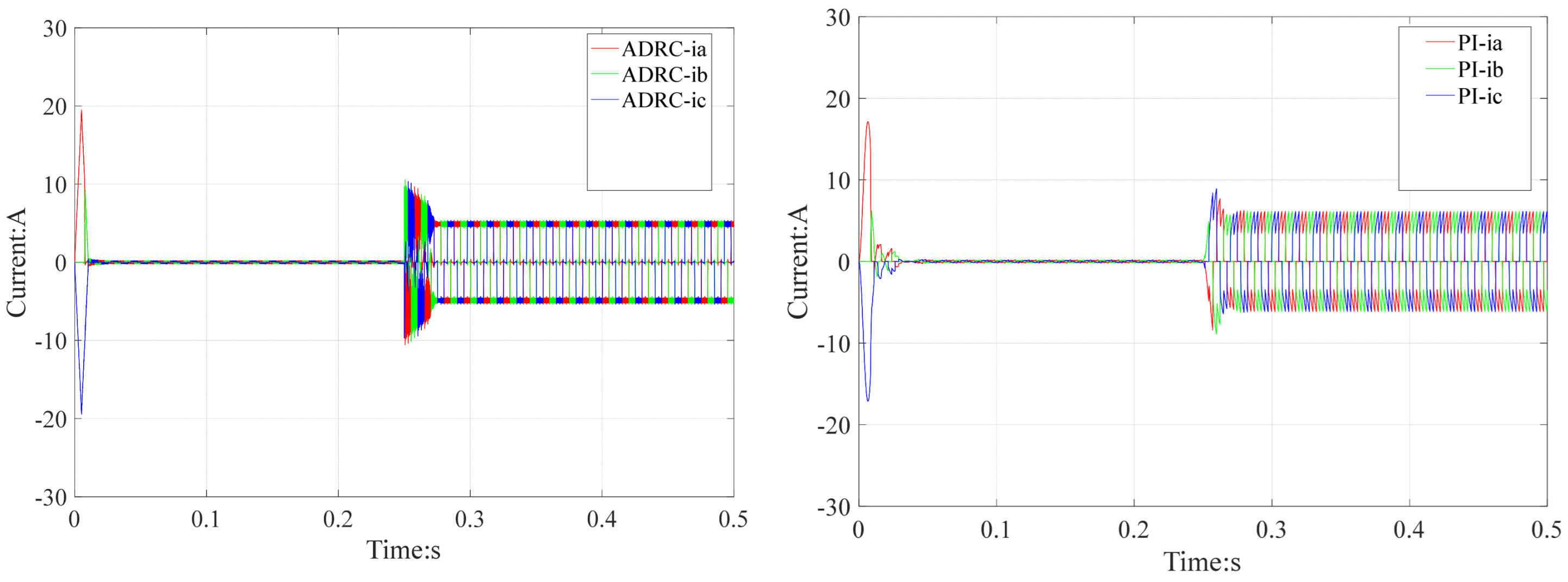
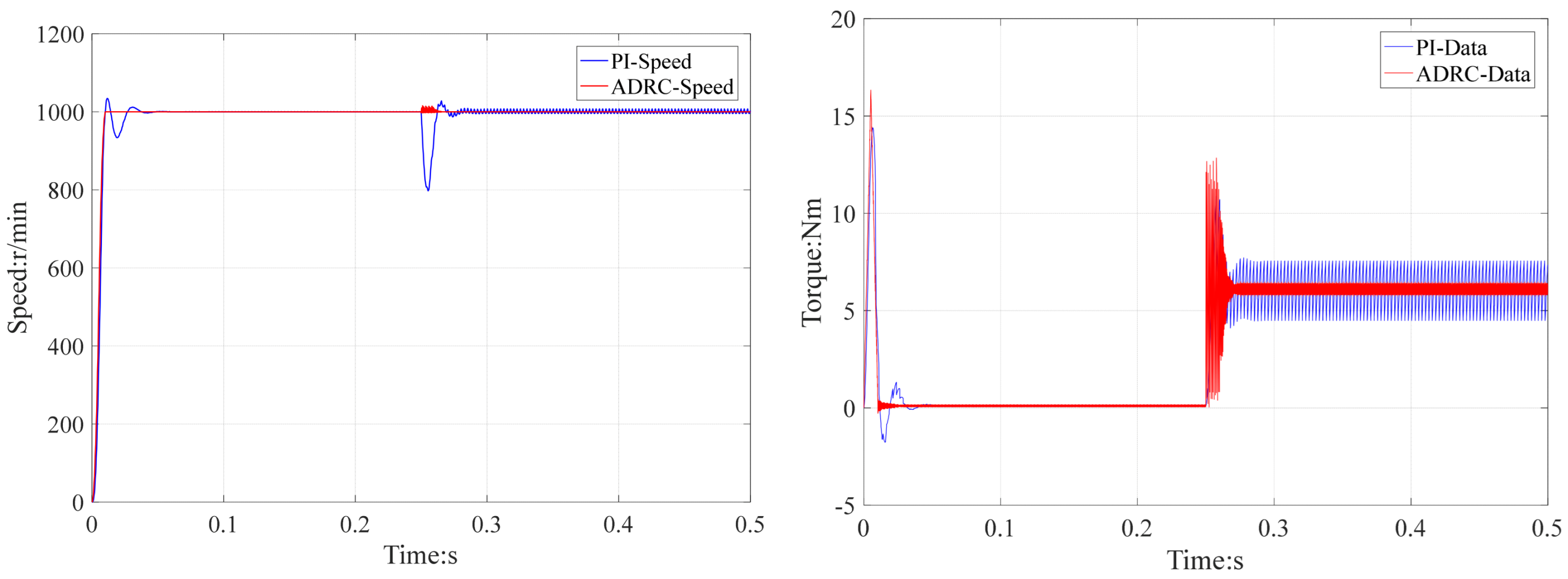
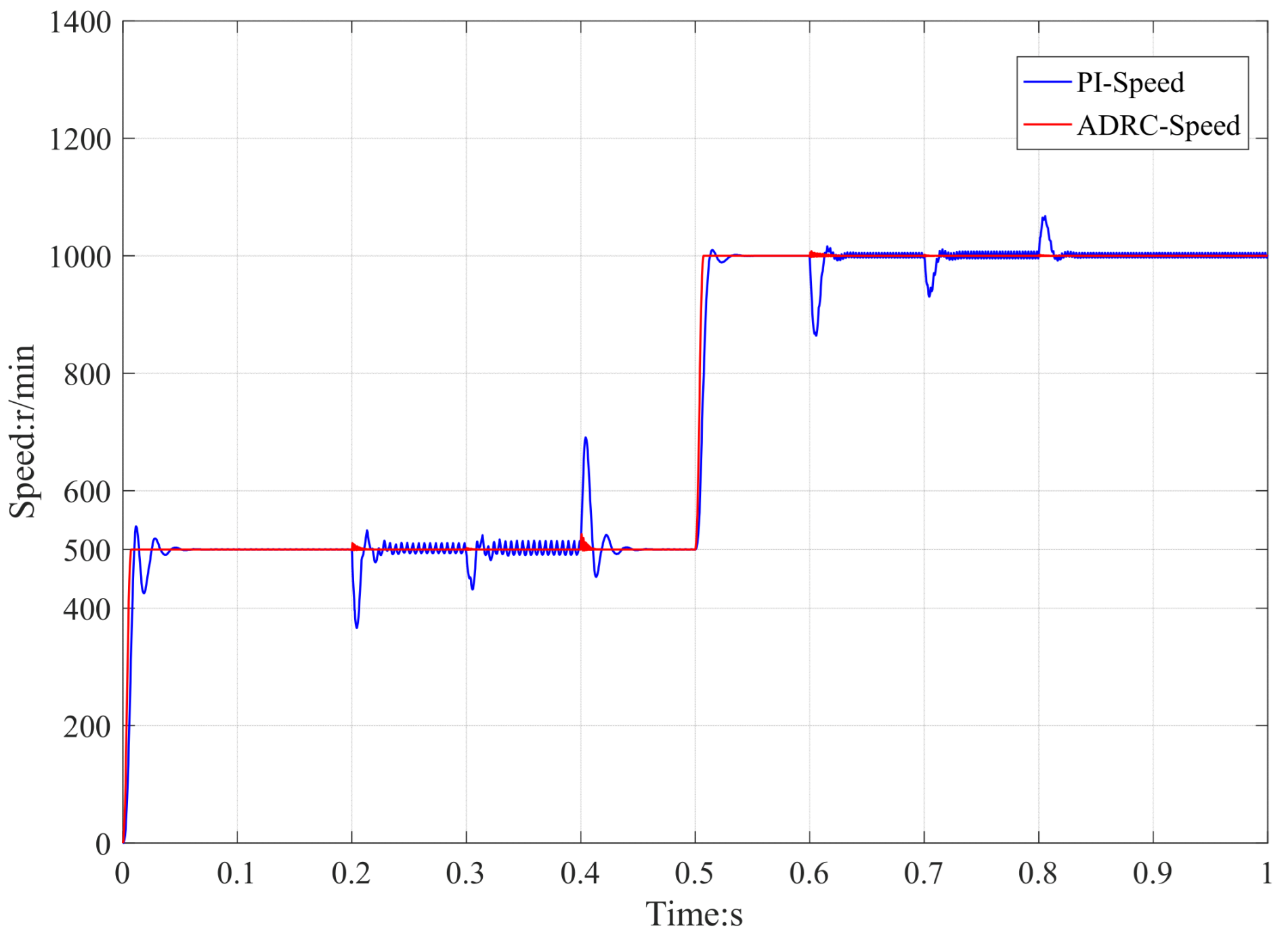
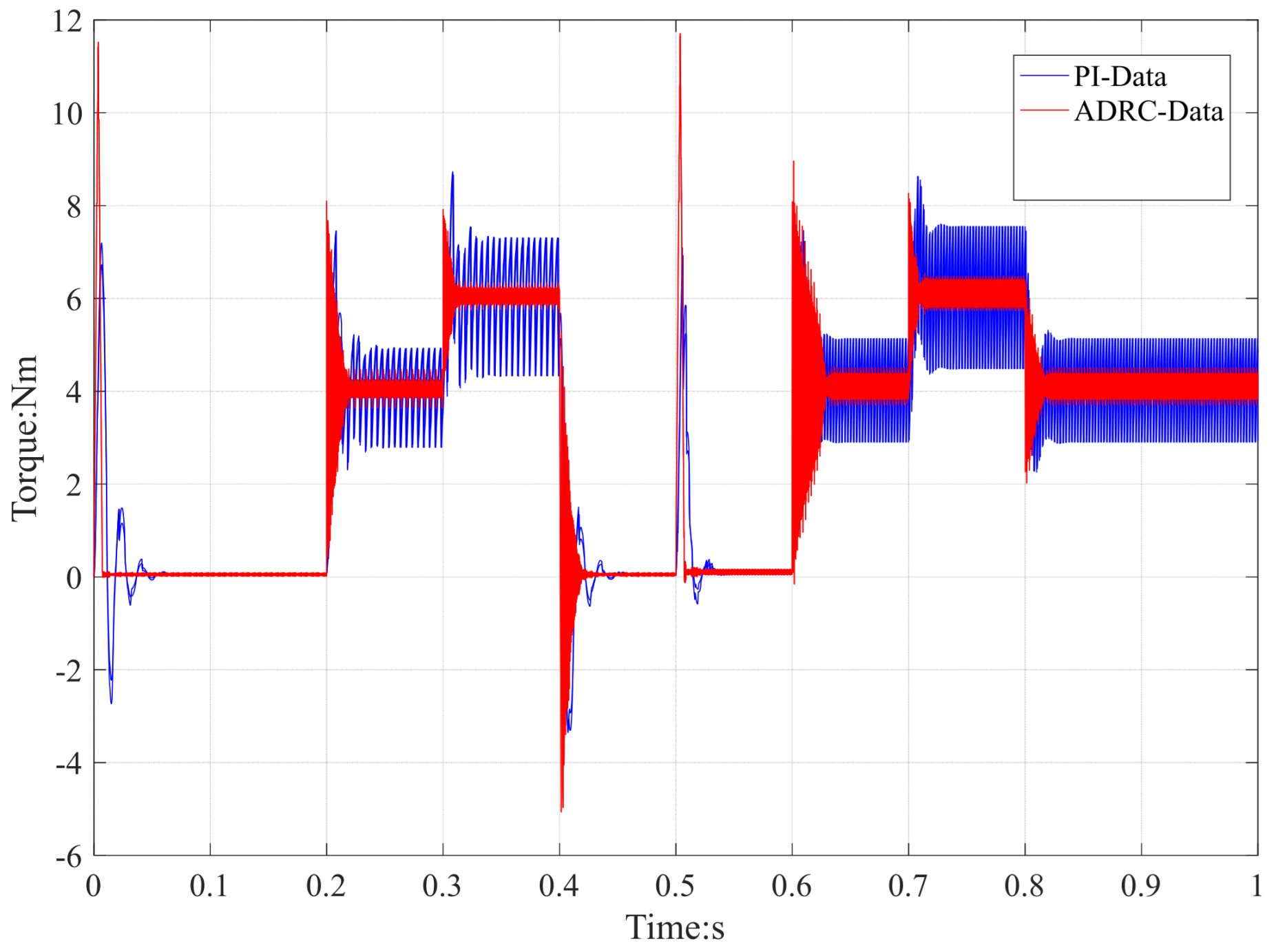
4. Analysis of the Simulation Experiment Results
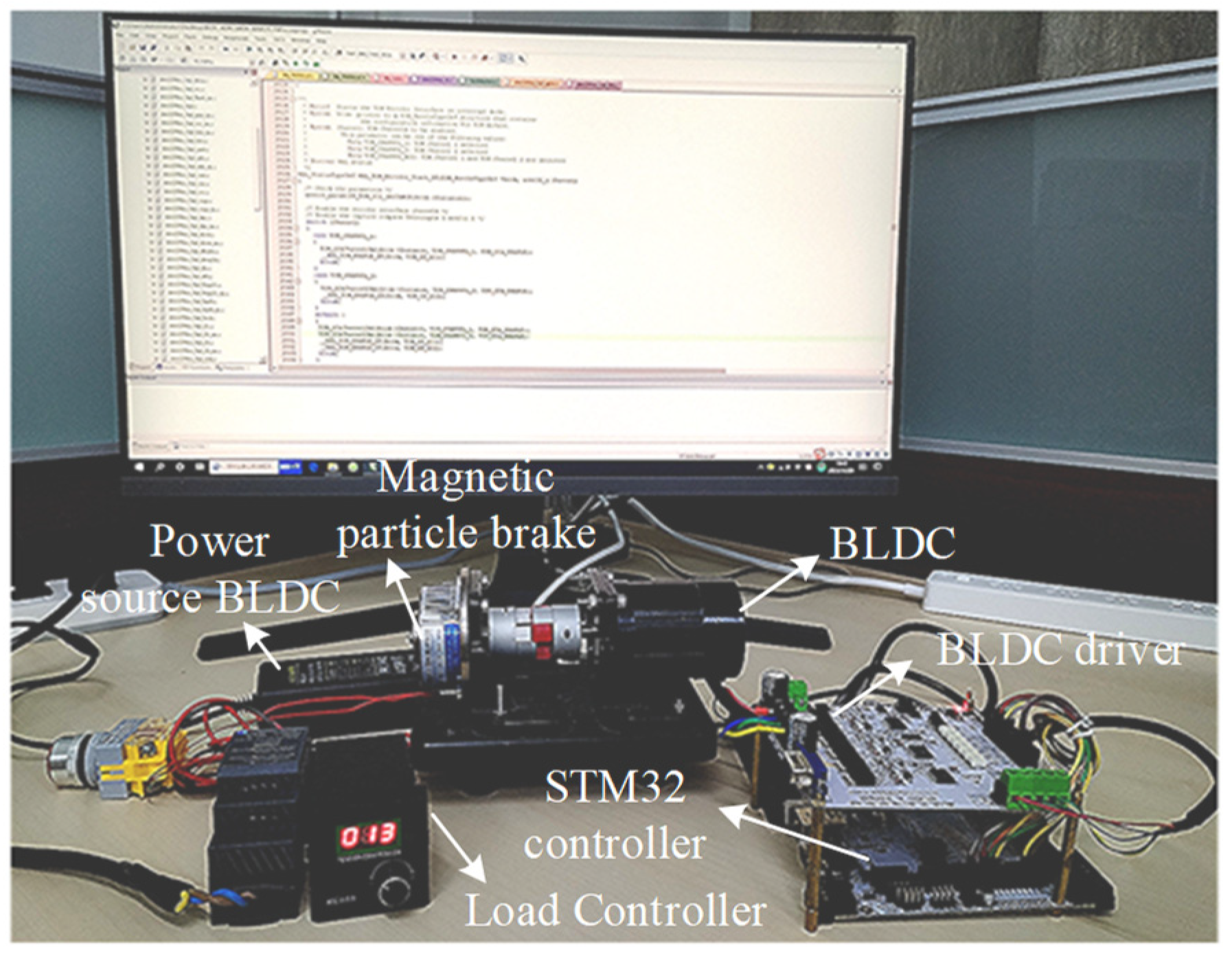
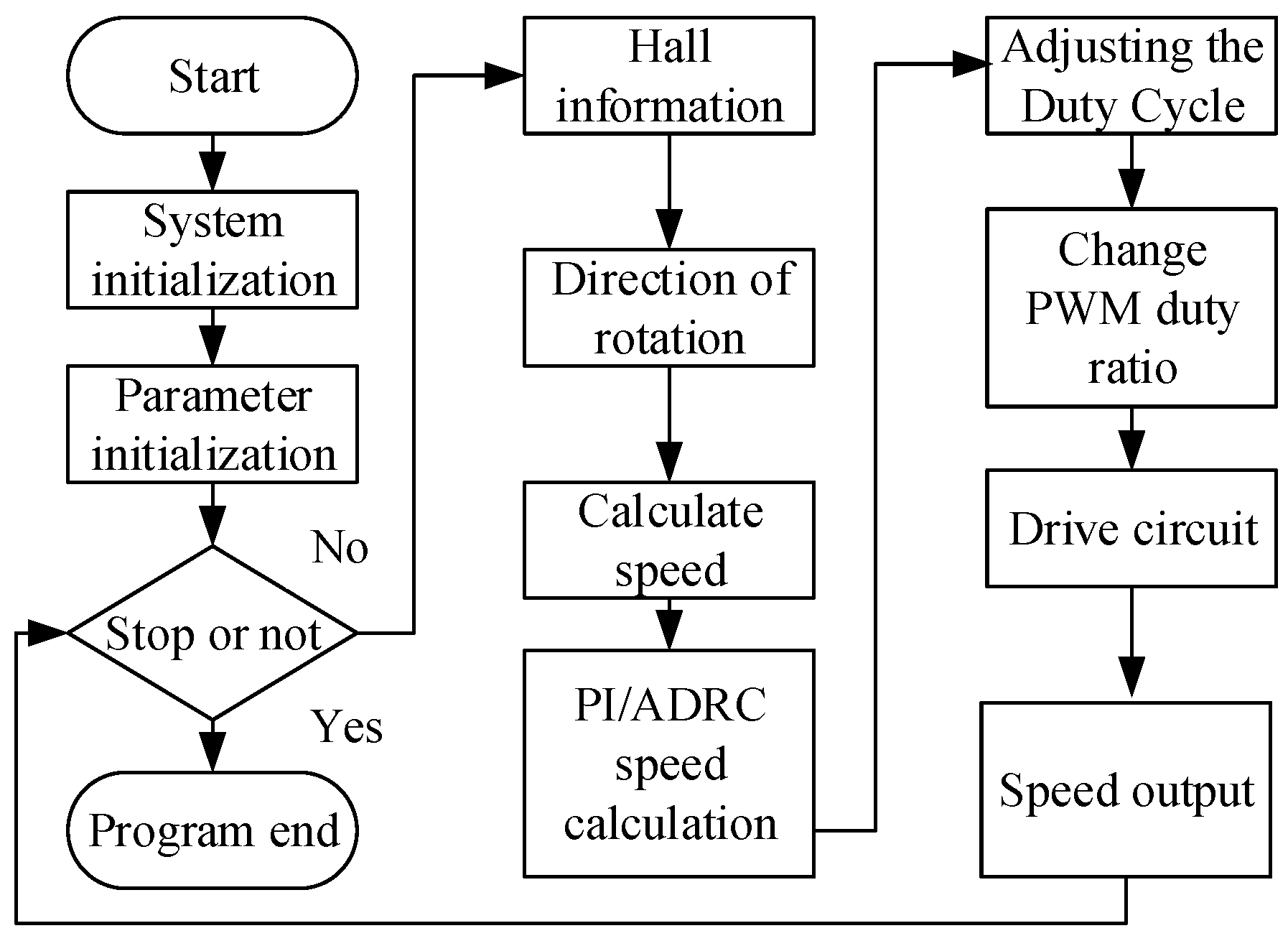
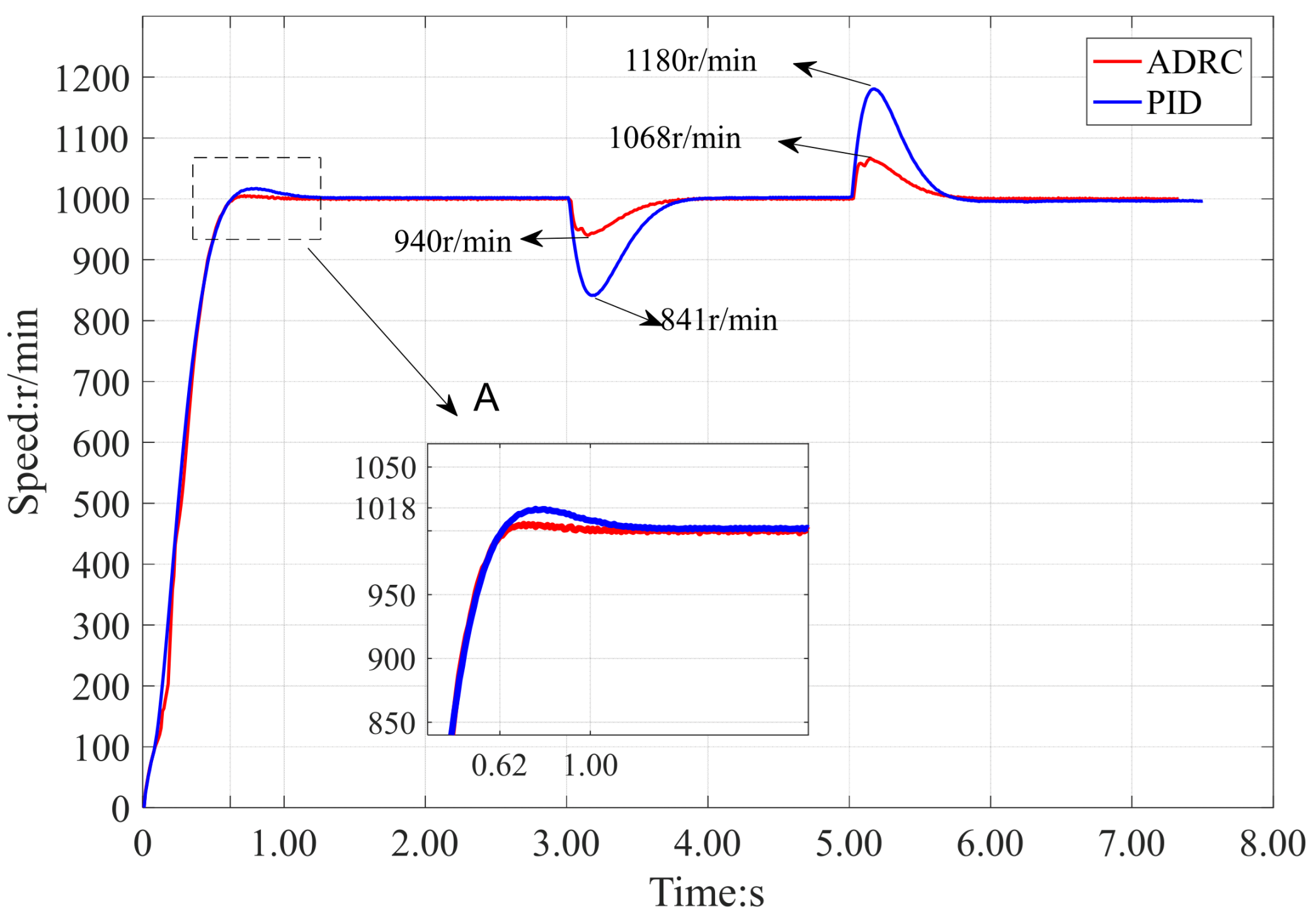
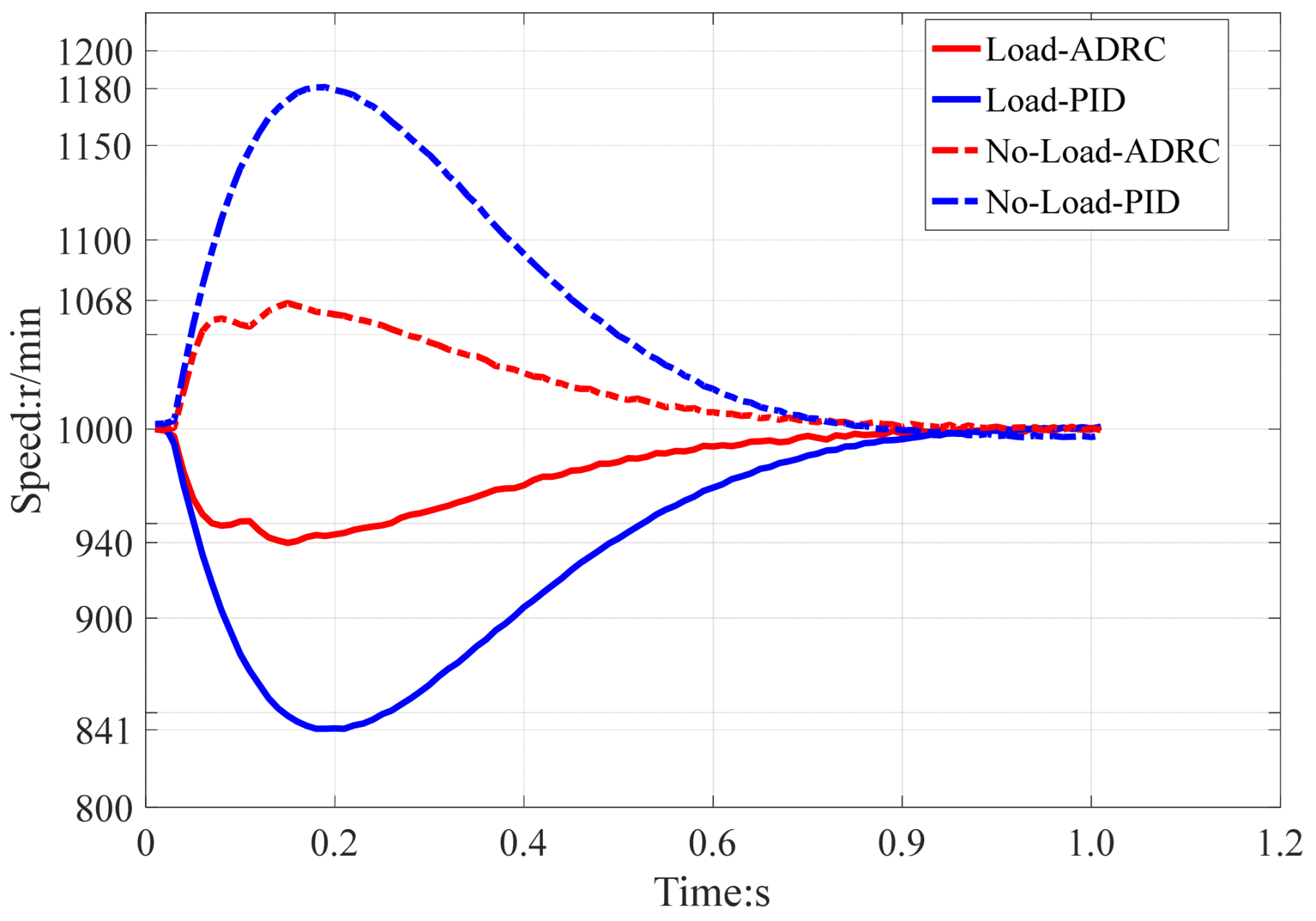
5. Analysis of the Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yedamale, P. Brushless DC (BLDC) motor fundamentals. Microchip Technol. Inc. 2003, 20, 3–15. [Google Scholar]
- Kim, T.H.; Ehsani, M. Sensorless control of the BLDC motors from near-zero to high speeds. IEEE Trans. Power Electron. 2004, 19, 1635–1645. [Google Scholar] [CrossRef]
- Nadolski, R.; Ludwinek, K.; Staszak, J.; Jaśkiewicz, M. Utilization of BLDC motor in electrical vehicles. Prz. Elektrotech. 2012, 88, 180–186. [Google Scholar]
- Low, T.S.; Lee, T.H.; Tseng, K.J.; Lock, K.S. Servo performance of a BLDC drive with instantaneous torque control. IEEE Trans. Ind. Appl. 1992, 28, 455–462. [Google Scholar] [CrossRef]
- Alphonse, I.; Thilagar, H.; Singh, F.B. Design of solar powered BLDC motor driven electric vehicle. Int. J. Renew. Energy Res. 2012, 2, 456–462. [Google Scholar]
- Carvajal, J.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar] [CrossRef]
- Huang, G.; Yuan, X.; Shi, K.; Wu, X. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle. J. Frankl. Inst. 2019, 356, 7290–7311. [Google Scholar] [CrossRef]
- Pei, G.; Yu, M.; Xu, Y.; Ma, C.; Lai, H.; Chen, F.; Lin, H. An improved PID controller for the compliant constant-force actuator based on BP neural network and smith predictor. Appl. Sci. 2021, 11, 2685. [Google Scholar] [CrossRef]
- Ahn, K.K.; Truong, D.Q. Online tuning fuzzy PID controller using robust extended Kalman filter. J. Process Control 2009, 19, 1011–1023. [Google Scholar] [CrossRef]
- Dey, C.; Mudi, R.K. An improved auto-tuning scheme for PID controllers. ISA Trans. 2009, 48, 396–409. [Google Scholar] [CrossRef] [PubMed]
- Maji, T.K.; Acharjee, P. Multiple solutions of optimal PMU placement using exponential binary PSO algorithm for smart grid applications. IEEE Trans. Ind. Appl. 2017, 53, 2550–2559. [Google Scholar] [CrossRef]
- Maghfiroh, H.; Ramelan, A.; Adriyanto, F. Fuzzy-PID in BLDC motor speed control using MATLAB/Simulink. J. Robot. Control. (JRC) 2022, 3, 8–13. [Google Scholar] [CrossRef]
- Nasri, M.; Nezamabadi-Pour, H.; Maghfoori, M. A PSO-based optimum design of PID controller for a linear brushless DC motor. World Acad. Sci. Eng. Technol. 2007, 26, 211–215. [Google Scholar]
- Gupta, R.A.; Kumar, R.; Bansal, A.K. Artificial intelligence application in Permanent Magnet Brushless DC motor drives. Artif. Intell. Rev. 2010, 33, 175–186. [Google Scholar] [CrossRef]
- Mousmi, A.; Abbou, A.; El Houm, Y. Real-time implementation of a novel hybrid fuzzy sliding mode control of a BLDC motor. Int. J. Power Electron. Drive Syst. 2019, 10, 1167. [Google Scholar] [CrossRef]
- KMA, P.; Nair, U. Intelligent fuzzy sliding mode controller based on FPGA for the speed control of a BLDC motor. Int. J. Power Electron. Drive Syst. 2020, 11, 477. [Google Scholar]
- Wu, Z.; Gao, Z.; Li, D.; Chen, Y.; Liu, Y. On transitioning from PID to ADRC in thermal power plants. Control. Theory Technol. 2021, 19, 3–18. [Google Scholar] [CrossRef]
- Fareh, R.; Khadraoui, S.; Abdallah, M.Y.; Baziyad, M.; Bettayeb, M. Active disturbance rejection control for robotic systems: A review. Mechatronics 2021, 80, 102671. [Google Scholar] [CrossRef]
- Castañeda, L.A.; Luviano-Juárez, A.; Ochoa-Ortega, G.; Chairez, I. Tracking control of uncertain time delay systems: An ADRC approach. Control Eng. Pract. 2018, 78, 97–104. [Google Scholar] [CrossRef]
- Hezzi, A.; Ben Elghali, S.; Bensalem, Y.; Zhou, Z.; Benbouzid, M.; Abdelkrim, M.N. ADRC-based robust and resilient control of a 5-phase PMSM driven electric vehicle. Machines 2020, 8, 17. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Q.; Zhang, Y. The effect of ADRC on vehicle braking performance. J. Electr. Eng. Technol. 2020, 15, 705–712. [Google Scholar] [CrossRef]
- Lotufo, M.A.; Colangelo, L.; Perez-Montenegro, C.; Canuto, E.; Novara, C. UAV quadrotor attitude control: An ADRC-EMC combined approach. Control Eng. Pract. 2019, 84, 13–22. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.; Zhang, X.; Sun, Q.; Sun, M. A novel control scheme for quadrotor UAV based upon active disturbance rejection control. Aerosp. Sci. Technol. 2018, 79, 601–609. [Google Scholar] [CrossRef]
- Zhong, S.; Huang, Y.; Chen, S.; Dai, L. A novel ADRC-based design for a kind of flexible aerocraft. Control Theory Technol. 2021, 19, 35–48. [Google Scholar] [CrossRef]
- Krawczyk, M.; Zajdel, A. Automatic taxi directional control system for general aviation aircraft. J. Kones 2018, 25, 299–306. [Google Scholar]
- He, J.; Yan, C.; Wang, X. Torque ripple suppression of brushless DC motor drive system based on improved harmonic injection active disturbance rejection control. Sensors 2022, 22, 1069. [Google Scholar] [CrossRef]
- Chang, X.; Li, Y.; Zhang, W.; Wang, N.; Xue, W. Active disturbance rejection control for a flywheel energy storage system. IEEE Trans. Ind. Electron. 2014, 62, 991–1001. [Google Scholar] [CrossRef]
- Li, J.; Ren, H.P.; Zhong, Y.R. Robust speed control of induction motor drives using first-order auto-disturbance rejection controllers. IEEE Trans. Ind. Appl. 2014, 51, 712–720. [Google Scholar] [CrossRef]
- De la Guerra, A.; Alvarez-Icaza, L. Robust control of the brushless dc motor with variable torque load for automotive applications. Electr. Power Compon. Syst. 2020, 48, 117–127. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, B.F. Robust control strategy for the speed control of brushless DC motor. J. Harbin Inst. Technol. 2013, 2, 90–94. [Google Scholar]
- Curiel-Olivares, G.; Linares-Flores, J.; Guerrero-Castellanos, J.F.; Hernández-Méndez, A. Self-balancing based on active disturbance rejection controller for the two-in-wheeled electric vehicle, experimental results. Mechatronics 2021, 76, 102552. [Google Scholar] [CrossRef]
- Hadi, N.H.; Ibraheem, I.K. Speed control of an SPMSM using a tracking differentiator-PID controller scheme with a genetic algorithm. Int. J. Electr. Comput. Eng. 2021, 11, 1728. [Google Scholar] [CrossRef]
- Khanh, P.Q.; Anh, H.P.H. Hybrid optimal fuzzy Jaya technique for advanced PMSM driving control. Electr. Eng. 2023, 105, 3629–3646. [Google Scholar] [CrossRef]
- Yun, H.M.; Kim, Y.; Choi, H.H. Differential evolution approach for performance enhancement of field-oriented PMSMs. J. Electr. Eng. Technol. 2018, 13, 2301–2309. [Google Scholar]
- Toloue, S.F.; Kamali, S.H.; Moallem, M. Multivariable sliding-mode extremum seeking PI tuning for current control of a PMSM. IET Electr. Power Appl. 2020, 14, 348–356. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Name | Value |
|---|---|---|---|
| Number of phases | 3 | Inertia (kg.m2) | 8 × 10−4 |
| Rs (Ω) | 0.7 | Inductance (H) | 2.72 × 10−3 |
| Flux (V.s) | 0.105 | Pole pairs | 4 |
| Control Method | ISE | ITSE | IAE | ITAE |
|---|---|---|---|---|
| PI | 2.08 × 108 | 1.12 × 106 | 2.35 × 106 | 1.94 × 104 |
| ADRC | 1.79 × 105 | 5.42 × 102 | 5.58 × 104 | 4.29 × 102 |
| Name | Value | Name | Value |
|---|---|---|---|
| Rate Voltage (V) | 24 | No-load Speed (r/min) | 3500 |
| Rate Current (A) | 5.9 | Rate Torque (Nm) | 0.38 |
| Rate Speed (r/min) | 2500 | Pole pairs | 4 |
| Brake output torque (Nm) | 1.5 | Brake Voltage (V) | 24 |
| Control Method | ISE | ITSE | IAE | ITAE |
|---|---|---|---|---|
| PI | 7.01 × 105 | 1.71 × 105 | 6.14 × 103 | 1.77 × 103 |
| ADRC | 8.98 × 104 | 1.91 × 104 | 2.17 × 103 | 5.87 × 102 |
| Control Method | ISE | ITSE | IAE | ITAE |
|---|---|---|---|---|
| PI | 1.42 × 106 | 3.98 × 105 | 9.85 × 103 | 3.36 × 103 |
| ADRC | 1.54 × 105 | 3.17 × 104 | 2.88 × 103 | 7.62 × 102 |
| Control Method | ISE | ITSE | IAE | ITAE |
|---|---|---|---|---|
| PI | 4.72 × 106 | 1.51 × 106 | 1.85 × 104 | 7.17 × 103 |
| ADRC | 8.94 × 105 | 2.13 × 105 | 7.37 × 103 | 2.21 × 103 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Shi, Z.; Yu, B.; Qi, H. Research on the Control Method of a Brushless DC Motor Based on Second-Order Active Disturbance Rejection Control. Machines 2024, 12, 244. https://doi.org/10.3390/machines12040244
Zhang P, Shi Z, Yu B, Qi H. Research on the Control Method of a Brushless DC Motor Based on Second-Order Active Disturbance Rejection Control. Machines. 2024; 12(4):244. https://doi.org/10.3390/machines12040244
Chicago/Turabian StyleZhang, Pan, Zhaoyao Shi, Bo Yu, and Haijiang Qi. 2024. "Research on the Control Method of a Brushless DC Motor Based on Second-Order Active Disturbance Rejection Control" Machines 12, no. 4: 244. https://doi.org/10.3390/machines12040244
APA StyleZhang, P., Shi, Z., Yu, B., & Qi, H. (2024). Research on the Control Method of a Brushless DC Motor Based on Second-Order Active Disturbance Rejection Control. Machines, 12(4), 244. https://doi.org/10.3390/machines12040244