Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter

 ,
,  ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
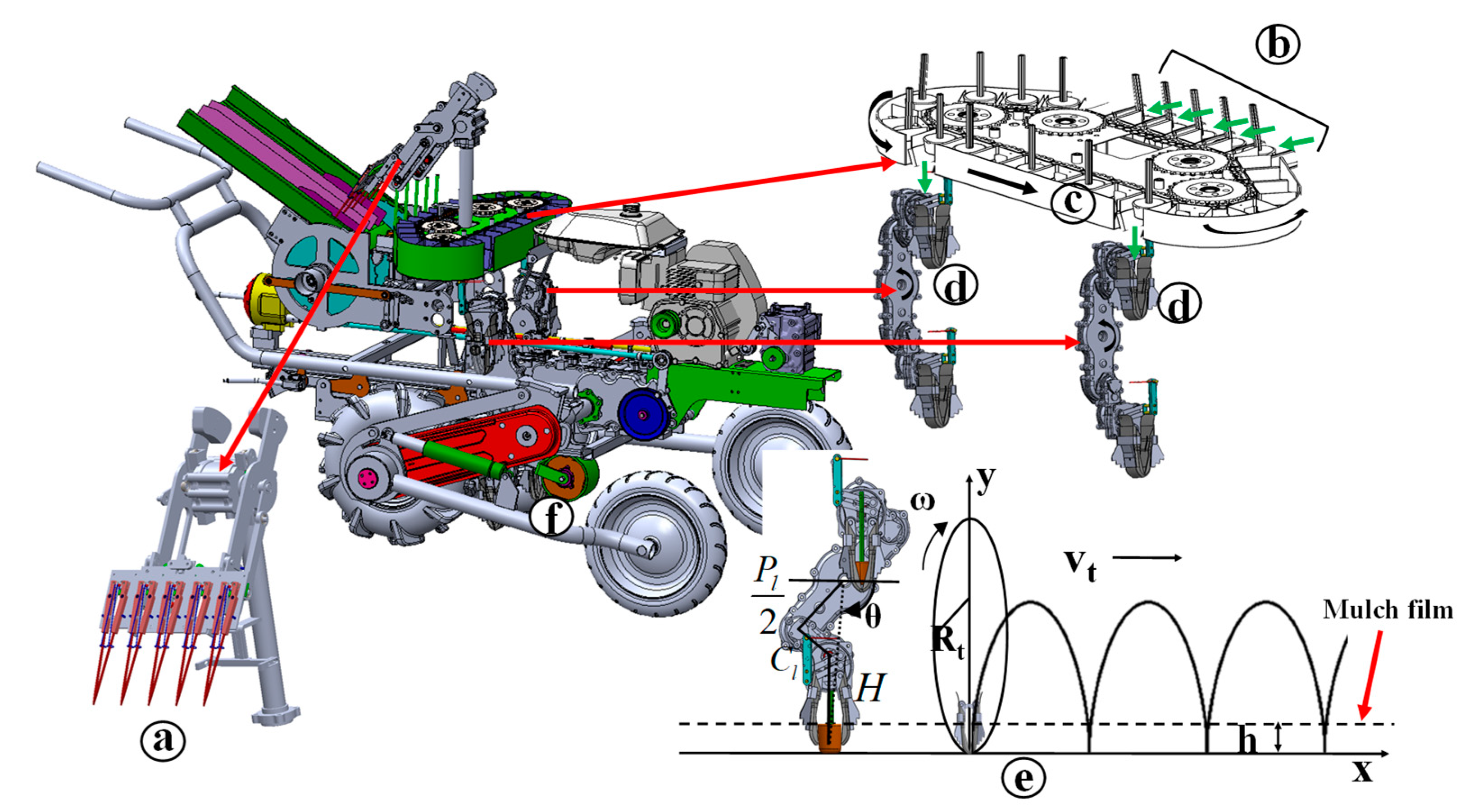
2.1. Working Principle of the Dibbling Mechanism
2.2. Theoretical Analysis
2.2.1. Rotating Speed Selection of Dibbling Mechanism
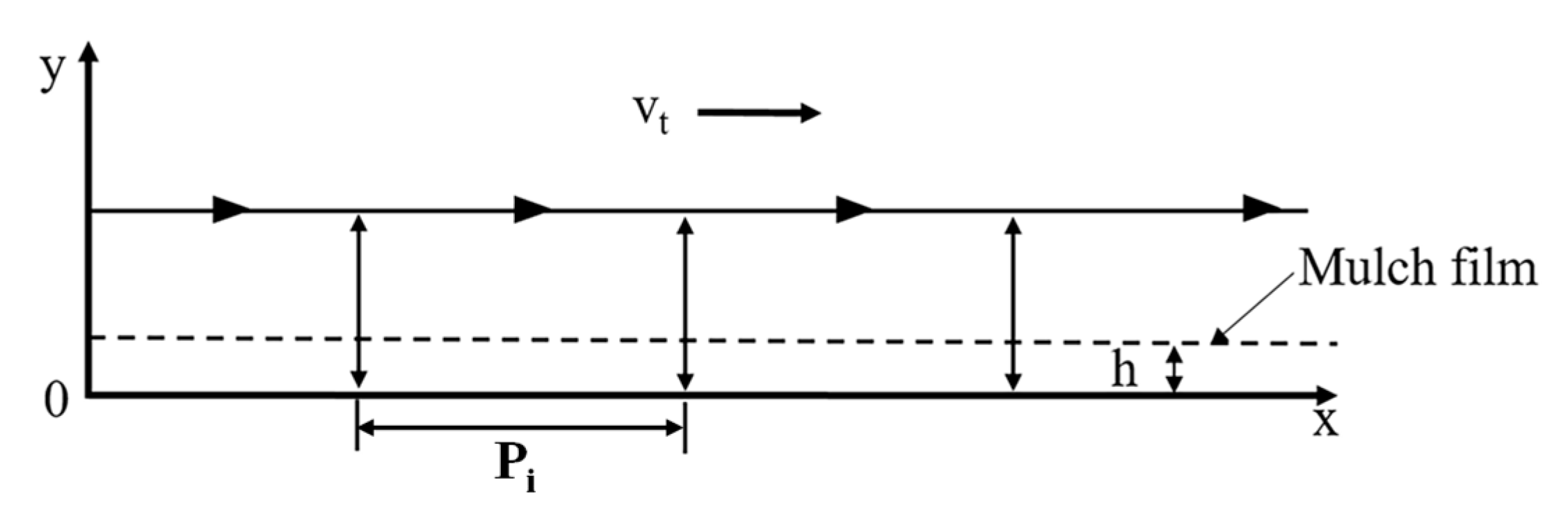
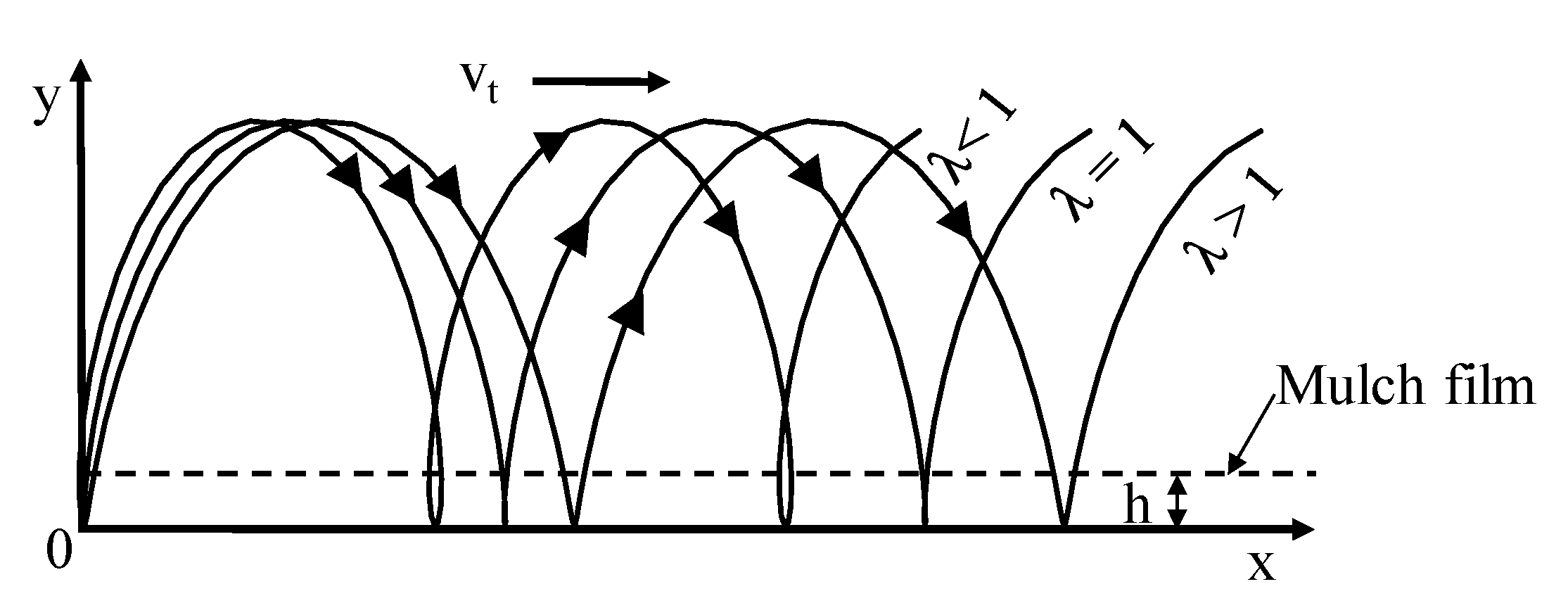
2.2.2. Constant Horizontal Speed of Seedling Deposition
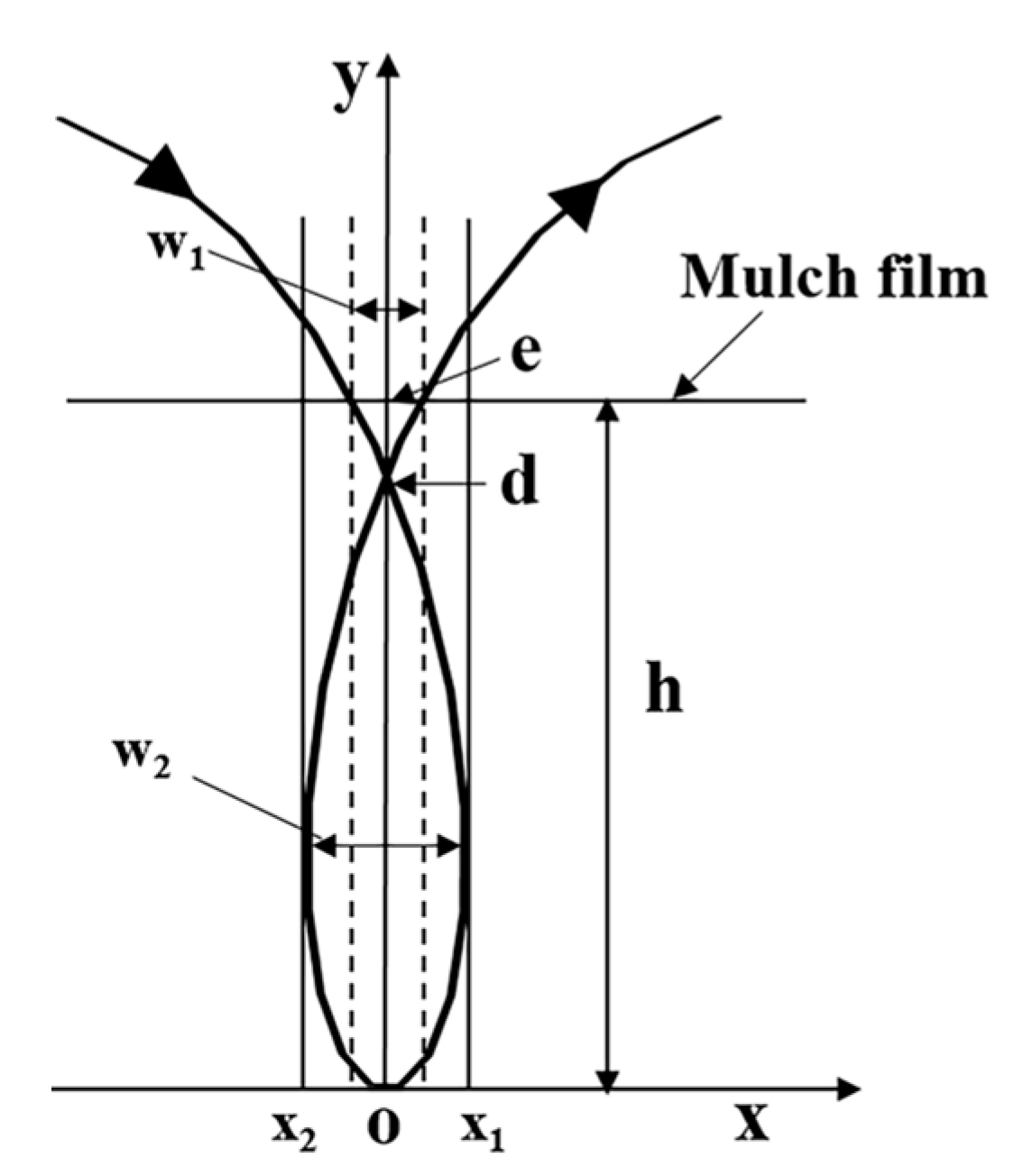
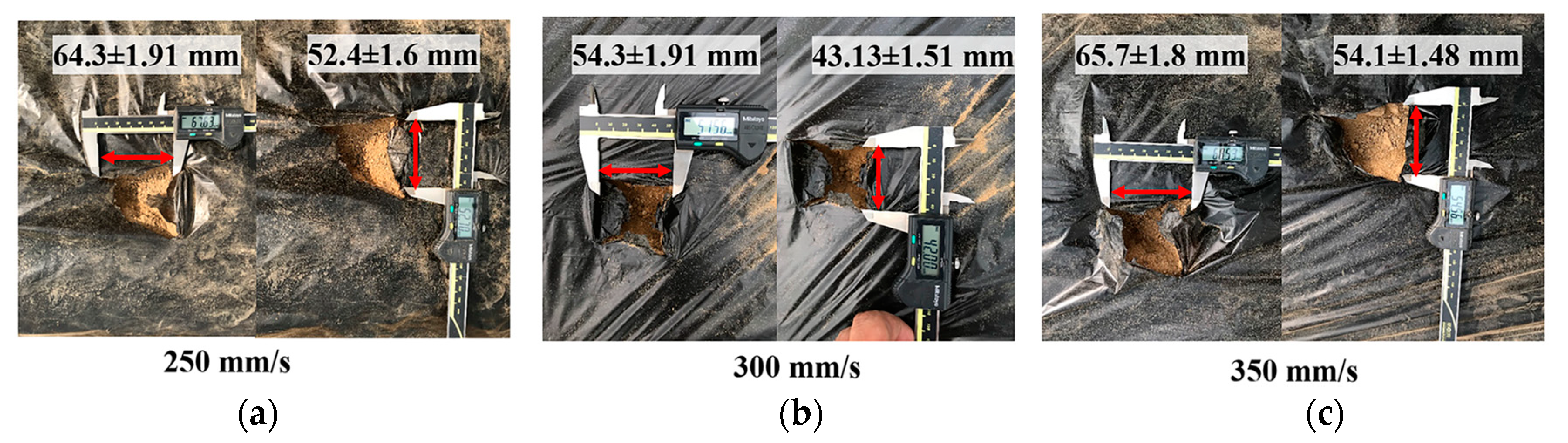
2.2.3. Evaluation of Mulch Film Damage
2.3. Simulation and Validation
2.3.1. Motion Simulation
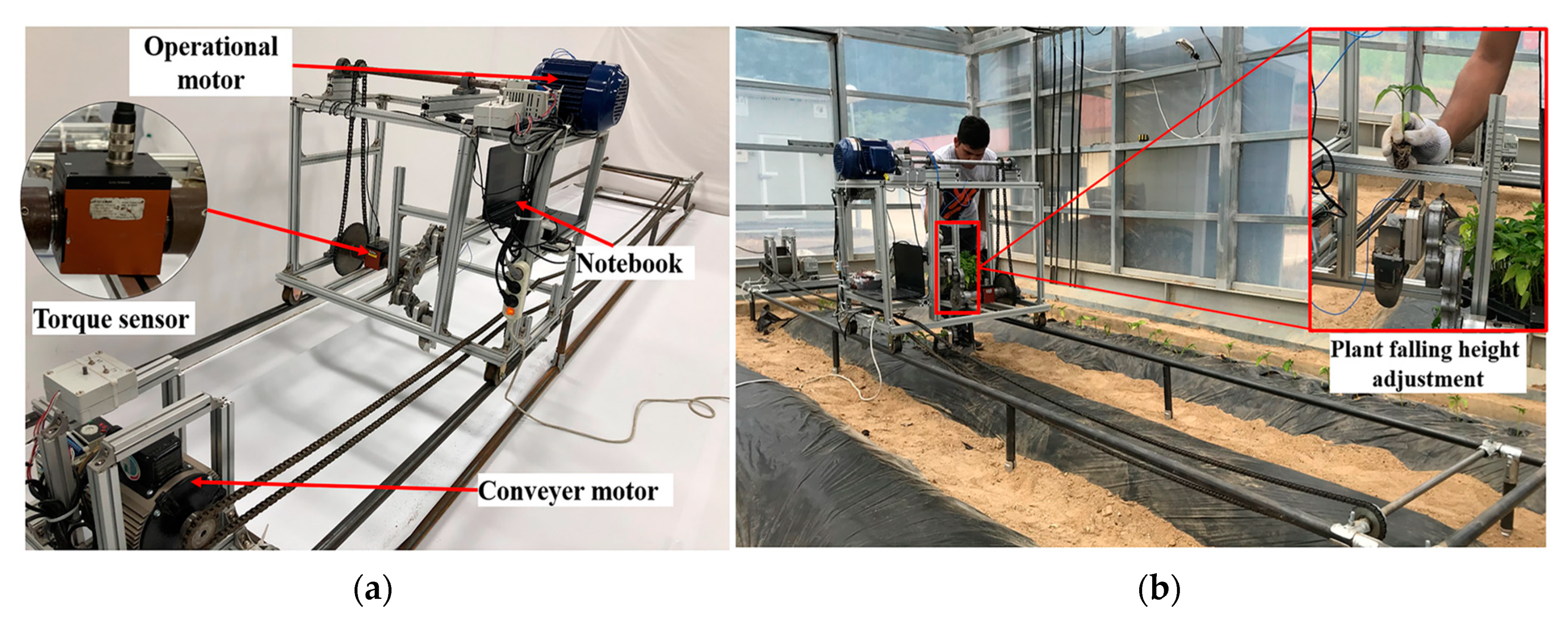
2.3.2. Validation Tests with Prototype
3. Results and Discussion
3.1. Rotational Mechanism Speed
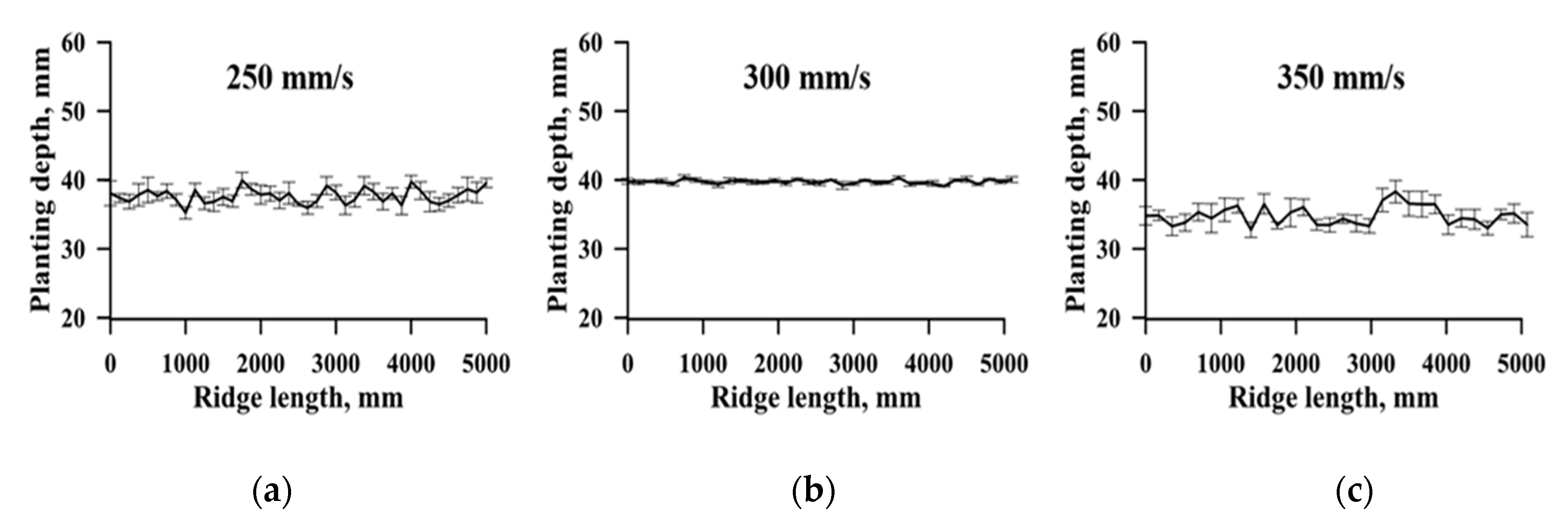
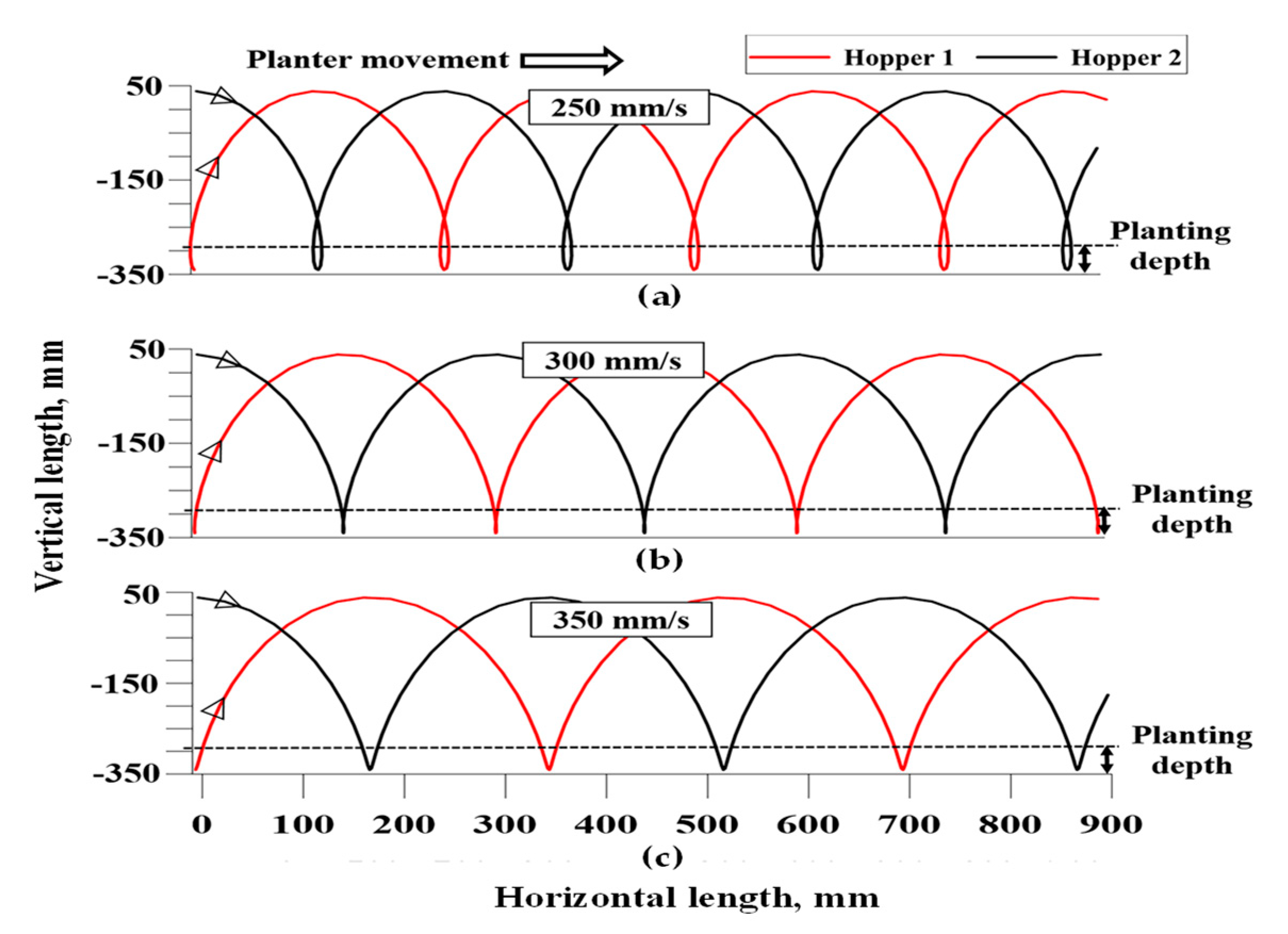
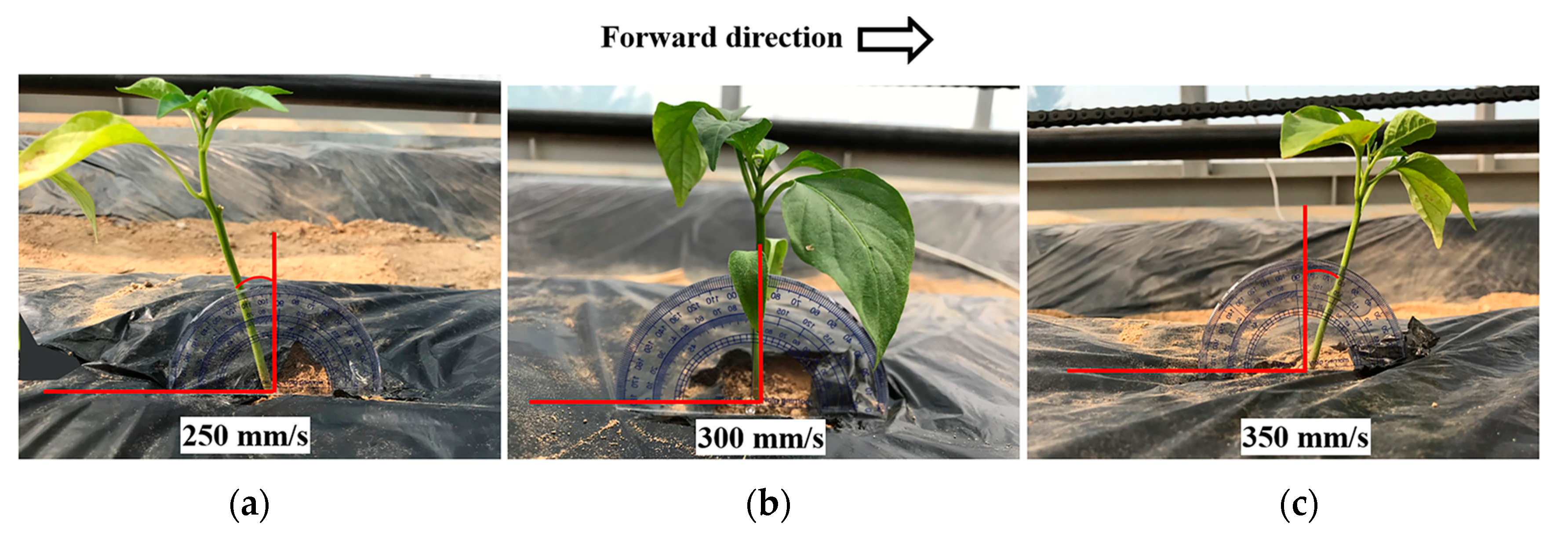
3.2. Seedling Deposition with Constant Horizontal Speeds
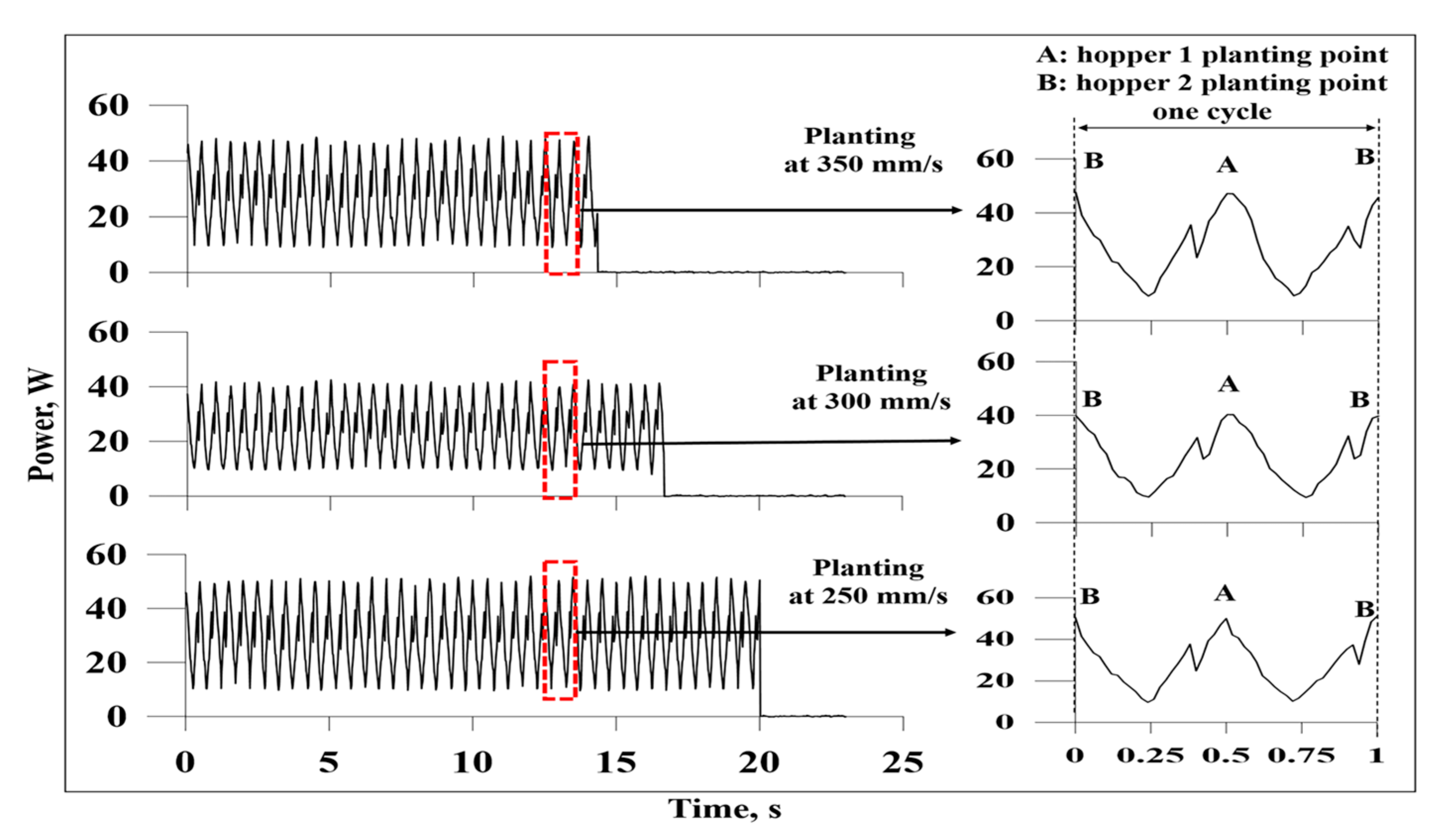
3.3. Mulch Film Damage and Power Consumption
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, Y.; Jun, H.J.; Lee, C.K.; Lee, C.S.; Yoo, S.N.; Suh, S.R.; Choi, Y.S. Development of a mechanical harvesting system for red pepper(i)—Surveys on conventional pepper cultivation and mechanization of pepper harvesting. J. Biosyst. Eng. 2010, 35, 367–372. [Google Scholar] [CrossRef] [Green Version]
- Zamani, D. Development and evaluation of a vegetable transplanter. Int. J. Eng. Res. Appl. 2014, 2, 40–46. [Google Scholar]
- Tsuga, K. Development of fully automatic vegetable transplanter. Japan Agric. Res. Q. 2000, 34, 21–28. [Google Scholar]
- Kumar, G.V.P.; Raheman, H. Vegetable transplanters for use in developing countries—A review. Int. J. Veg. Sci. 2008, 14, 232–255. [Google Scholar] [CrossRef]
- Parish, R.L. Current developments in seeders and transplanters for vegetable crops. Horttechnology 2005, 15, 46–51. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, M.; Islam, M.N.; Iqbal, M.Z.; Islam, S.; Lee, D.H.; Kim, D.G.; Jun, H.J.; Chung, S.O. Analysis of overturning and vibration during field operation of a tractor-mounted 4-row radish collector toward ensuring user safety. Machines 2020, 8, 77. [Google Scholar] [CrossRef]
- Khadatkar, A.; Mathur, S.M.; Gaikwad, B.B. Automation in transplanting: A smart way of vegetable cultivation. Curr. Sci. 2018, 115, 84–92. [Google Scholar] [CrossRef]
- FAO (Food and Agriculture Organization of the United Nations). 2018. Available online: http://www.fao.org/faostat/en/#data/QC (accessed on 27 November 2020).
- Statistics Korea. 2018. Available online: http://kostat.go.kr/portal/eng/index.action (accessed on 27 November 2020).
- Nam, J.S.; Byun, J.H.; Kim, T.H.; Kim, M.H.; Kim, D.C. Measurement of mechanical and physical properties of pepper for particle behavior analysis. J. Biosyst. Eng. 2018, 43, 73–84. [Google Scholar]
- Kang, T.S. Identification of undeclared ingredients in red pepper products sold on the South Korea commercial market using real-time PCR methods. Food Control 2018, 90, 73–80. [Google Scholar] [CrossRef]
- Nandede, B.M.; Raheman, H. A tractor drawn vegetable transplanter for handling paper pot seedlings. AMA Agric. Mech. Asia Africa Lat. Am. 2016, 47, 87–92. [Google Scholar]
- Sun, J.F.; Li, X.Y.; Li, W.J.; Zhu, Y.Z.; Wang, J.; Wang, Q. Structure design of manipulator for pot seedling transplanter and simulation analysis. In Applied Mechanics and Materials; Liu, H., Kuroda, S., Zheng, L., Eds.; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 670–671, pp. 829–833. [Google Scholar]
- Manilla, R.D.; Shaw, L.N. A high-speed dibbling transplanter. Trans. ASAE 1987, 30, 0904–0908. [Google Scholar] [CrossRef]
- Herrison, R.D.; Herrison, P.B.; Zuhoski, J. Computer Operated Automatic Seedling Plant Transplanting Machine. U.S. Patent 4947579, 14 August 1990. [Google Scholar]
- Dong, F.; Geng, D.; Wang, Z.; Dong, F.; Geng, D.Y.; Wang, Z.Y. Study on block seedling transplanter with belt feeding mechanism. Trans. Chin. Soc. Agric. Mach. 2000, 31, 42–45. [Google Scholar]
- Park, S.H.; Cho, S.C.; Kim, J.Y.; Choi, D.K.; Kim, C.K.; Kwak, T.Y. Development of rotary type transplanting device for vegetable transplanter. J. Biosyst. Eng. 2005, 30, 135–140. [Google Scholar] [CrossRef] [Green Version]
- Han, L.H.; Mao, H.P.; Hu, J.P.; Kumi, F. Development of a riding-type fully automatic transplanter for vegetable plug seedlings. Spanish J. Agric. Res. 2019, 17, 0205. [Google Scholar] [CrossRef]
- Xue, X.; Li, L.; Xu, C.; Li, E.; Wang, Y. Optimized design and experiment of a fully automated potted cotton seedling transplanting mechanism. Int. J. Agric. Biol. Eng. 2020, 13, 111–117. [Google Scholar] [CrossRef]
- Ji, J.; Cheng, Q.; Jin, X.; Zhang, Z.; Xie, X.; Li, M. Design and test of 2ZLX-2 transplanting machine for oil peony. Int. J. Agric. Biol. Eng. 2020, 13, 61–69. [Google Scholar]
- Jin, X.; Cheng, Q.; Zhao, B.; Ji, J.; Li, M. Design and test of 2ZYM-2 potted vegetable seedlings transplanting machine. Int. J. Agric. Biol. Eng. 2020, 13, 101–110. [Google Scholar] [CrossRef]
- Yin, D.Q.; Wang, J.Z.; Zhang, S.; Zhang, N.Y.; Zhou, M.L. Optimized design and experiments of a rotary-extensive-type flowerpot seedling transplanting mechanism. Int. J. Agric. Biol. Eng. 2019, 12, 45–50. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, S.; Li, N.; Faheem, M.; Zhou, T.; Cai, W.; Zhao, M.; Zhu, X.; Li, P. Development and Field Test of an Autonomous Strawberry Plug Seeding Transplanter for Use in Elevated Cultivation. Appl. Eng. Agric. 2019, 35, 1067–1078. [Google Scholar] [CrossRef]
- Zhou, M.; Shan, Y.; Xue, X.; Yin, D. Theoretical analysis and development of a mechanism with punching device for transplanting potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2020, 13, 85–92. [Google Scholar]
- Islam, M.N.; Iqbal, M.Z.; Ali, M.; Chowdhury, M.; Kabir, M.S.N.; Park, T.; Kim, Y.J.; Chung, S.O. Kinematic analysis of a clamp-type picking device for an automatic pepper transplanter. Agriculture 2020, 10, 627. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.; Ma, H.; Ji, J.; Zhao, K.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef] [Green Version]
- Ye, B.; Zeng, G.; Deng, B.; Yang, C.; Liu, J.; Yu, G. Design and tests of a rotary plug seedling pick-up mechanism for vegetable automatic transplanter. Int. J. Agric. Biol. Eng. 2020, 13, 70–78. [Google Scholar] [CrossRef]
- Ji, J.T.; He, Y.K.; Du, X.W.; He, Z.T.; Du, M.M.; Zheng, Z.H.; Jia, S.T.; Liu, J.J.; Liu, Q. Design of the up-film transplanter and kinematic analysis of its planting devices. In Proceedings of the International Conference on Advanced Mechatronic Systems, Luoyang, China, 25–27 September 2013; ICAMechS (IEEE): New York, NY, USA, 2013. [Google Scholar]
- Manes, G.; Anoop, D.; Arsdeep, S.; Mahal, J. Feasibility of mechanical transplanter for paddy transplanting in Punjab. AMA Agric. Mech. Asia Africa Lat. Am. 2013, 44, 4–7. [Google Scholar]
- Jiaodi, L.; Weibin, C.; Dongyang, T.; Haiyang, T.; Hongzheng, Z. Kinematic analysis and experiment of planetary five-bar planting mechanism for zero-speed transplanting on mulch film. Int. J. Agric. Biol. Eng. 2016, 9, 84–91. [Google Scholar]
- Chen, Z.; Sun, S.; Zhu, Z.; Jiang, H.; Zhang, X. Assessing the effects of plant density and plastic film mulch on maize evaporation and transpiration using dual crop coefficient approach. Agric. Water Manag. 2019, 225, 105765. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, L.; Xue, X.; Kamran, M.; Ahmad, I.; Dong, Z.; Liu, T.; Jia, Z.; Zhang, P.; Han, Q. Plastic film mulching stimulates soil wet–dry alternation and stomatal behavior to improve maize yield and resource use efficiency in a semi-arid region. F. Crop. Res. 2019, 233, 101–113. [Google Scholar] [CrossRef]
- Jun, F.; Gui, Q.; Weitang, S.; Yajia, L. The kinematic analysis and design criteria of the dibble-type transplanters. Trans. Chin. Soc. 2002, 33, 48–50. [Google Scholar]
- Kim, G.W.; Das, S.; Hwang, H.Y.; Kim, P.J. Nitrous oxide emissions from soils amended by cover-crops and under plastic film mulching: Fluxes, emission factors and yield-scaled emissions. Atmos. Environ. 2017, 152, 377–388. [Google Scholar] [CrossRef]
- RDA. Rural Development Administration. Information about Pepper Farming Process. 2014. Available online: https://www.krei.re.kr/DATA/portlet-repositories/agri/files/1500615806032.pdf (accessed on 27 November 2020).
- Dihingia, P.C.; Prasanna Kumar, G.V.; Sarma, P.K. Development of a hopper-type planting device for a walk-behind hand-tractor-powered vegetable transplanter. J. Biosyst. Eng. 2016, 41, 21–33. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.C.; Cho, Y.H.; Ku, Y.G.; Bae, J.H. Seedling qualities of hot pepper according to seedling growth periods and growth and yield after planting. Korean J. Hortic. Sci. Technol. 2015, 33, 839–844. [Google Scholar] [CrossRef] [Green Version]
- Du, S.; Yu, J.; Wang, W. Determining the minimal mulch film damage caused by the up-film transplanter. Adv. Mech. Eng. 2018, 10, 168781401876677. [Google Scholar] [CrossRef] [Green Version]
- Kumar, G.V.P.; Raheman, H. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings. Biosyst. Eng. 2011, 110, 189–197. [Google Scholar] [CrossRef]
- Ajit, K.S.; Carroll, E.G.; Roger, P.R.; Dennis, R.B. Engineering Principles of Agricultural Machines, 2nd ed.; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2006. [Google Scholar]
- Seo, T.C.; An, S.W.; Kim, S.M.; Nam, C.W.; Chun, H.; Kim, Y.C.; Kang, T.K.; Woo, S.K.; Jeon, S.G.; Jang, K.S. Effect of the seedlings difference in cylindrical paper pot trays on initial root growth and yield of pepper. Prot. Hortic. Plant Fact. 2017, 26, 368–377. [Google Scholar] [CrossRef]
- Rohrer, R.A.; Luck, J.D.; Pitla, S.K.; Hoy, R. Evaluation of the accuracy of machine reported can data for engine torque and speed. Trans. ASAE 2018, 61, 1547–1557. [Google Scholar] [CrossRef]
- Oh, T.K.; Lee, J.H.; Kim, S.H.; Lee, H.C. Effect of biochar application on growth of Chinese cabbage (Brassica chinensis). Korean J. Agric. Sci. 2017, 44, 359–365. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition and Measurement Unit |
|---|---|
| Pl | Primary arm length of the dibbling mechanism, mm |
| Cl | Connecting arm length of the dibbling mechanism, mm |
| H | Length of the dibbling hopper, mm |
| Rt | Rotational radius of the dibbling hopper, mm |
| vt | Forward speed of planter, mm/s |
| θ | Angle between the vertical axis and the dibbling hopper, rad |
| ω | Angular velocity of the dibbling hopper, rad/s |
| ω1 | Angular velocity of the primary arm, rad/s |
| ω2 | Angular velocity of the connecting arm, rad/s |
| θ1 | Angle between the vertical axis and the primary arm, rad |
| θ2 | Angle between the primary arm and connecting arm, rad |
| h | Planting depth, mm |
| Pi | Desired planting interval, mm |
| n | Rotational speed of dibbling mechanism, rpm |
| Rst | Required seedling supply rate, seedlings/s |
| Nr | Number of rows planted at a time, integer |
| Ft | Free-falling time of seedling, s |
| l | Free-falling height of seedling, mm |
| vs | Free-falling velocity of seedling, mm/s |
| ρ | Density of air at 27 °C, g/mm3 |
| α | Constant, numeral |
| g | Gravitational acceleration, mm/s2 |
| Cd | Air drag coefficient of seedling, numeral |
| A | Frontal area of seedling, mm2 |
| S | Average weight of seedling, g |
| λ | Characteristic coefficient, numeral |
| Soil Water Content (%) | Soil Temperature (°C) | Soil EC (dS/m) | Bulk Density (g/cm3) | Cone Index (MPa) | Soil Texture (Sandy Loam) | ||
|---|---|---|---|---|---|---|---|
| Sand | Silt | Clay | |||||
| 24.97 ±1.16 | 32.1 ±0.6 | 1.42 ±0.12 | 1.37 ±0.04 | 0.63 ±0.09 | 70% | 12% | 18% |
| Forward Speed (mm/s) | Seedling Upright Angle | Misplanting Rate (%) | Mulch Film Damage (mm2) | Max. Power Requirement (W) |
|---|---|---|---|---|
| 250 | −16.35 ± 5.3 | 14.23 | 3369.32 ± 3.05 | 48.09 ± 1.42 |
| 300 | 0 ± 3.26 | 8.19 | 2341.95 ± 2.89 | 40.91 ± 0.97 |
| 350 | +19.5 ± 4.6 | 17.31 | 3554.37 ± 2.67 | 49.9 ± 1.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, M.Z.; Islam, M.N.; Chowdhury, M.; Islam, S.; Park, T.; Kim, Y.-J.; Chung, S.-O. Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter. Machines 2021, 9, 6. https://doi.org/10.3390/machines9010006
Iqbal MZ, Islam MN, Chowdhury M, Islam S, Park T, Kim Y-J, Chung S-O. Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter. Machines. 2021; 9(1):6. https://doi.org/10.3390/machines9010006
Chicago/Turabian StyleIqbal, Md Zafar, Md Nafiul Islam, Milon Chowdhury, Sumaiya Islam, Tusan Park, Yong-Joo Kim, and Sun-Ok Chung. 2021. "Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter" Machines 9, no. 1: 6. https://doi.org/10.3390/machines9010006
APA StyleIqbal, M. Z., Islam, M. N., Chowdhury, M., Islam, S., Park, T., Kim, Y. -J., & Chung, S. -O. (2021). Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter. Machines, 9(1), 6. https://doi.org/10.3390/machines9010006