
Analysis of the Vibration Suppression of Double-Beam System via Nonlinear Switching Piezoelectric Network †


Abstract
:1. Introduction
2. Single-Beam System with SSDI Shunt
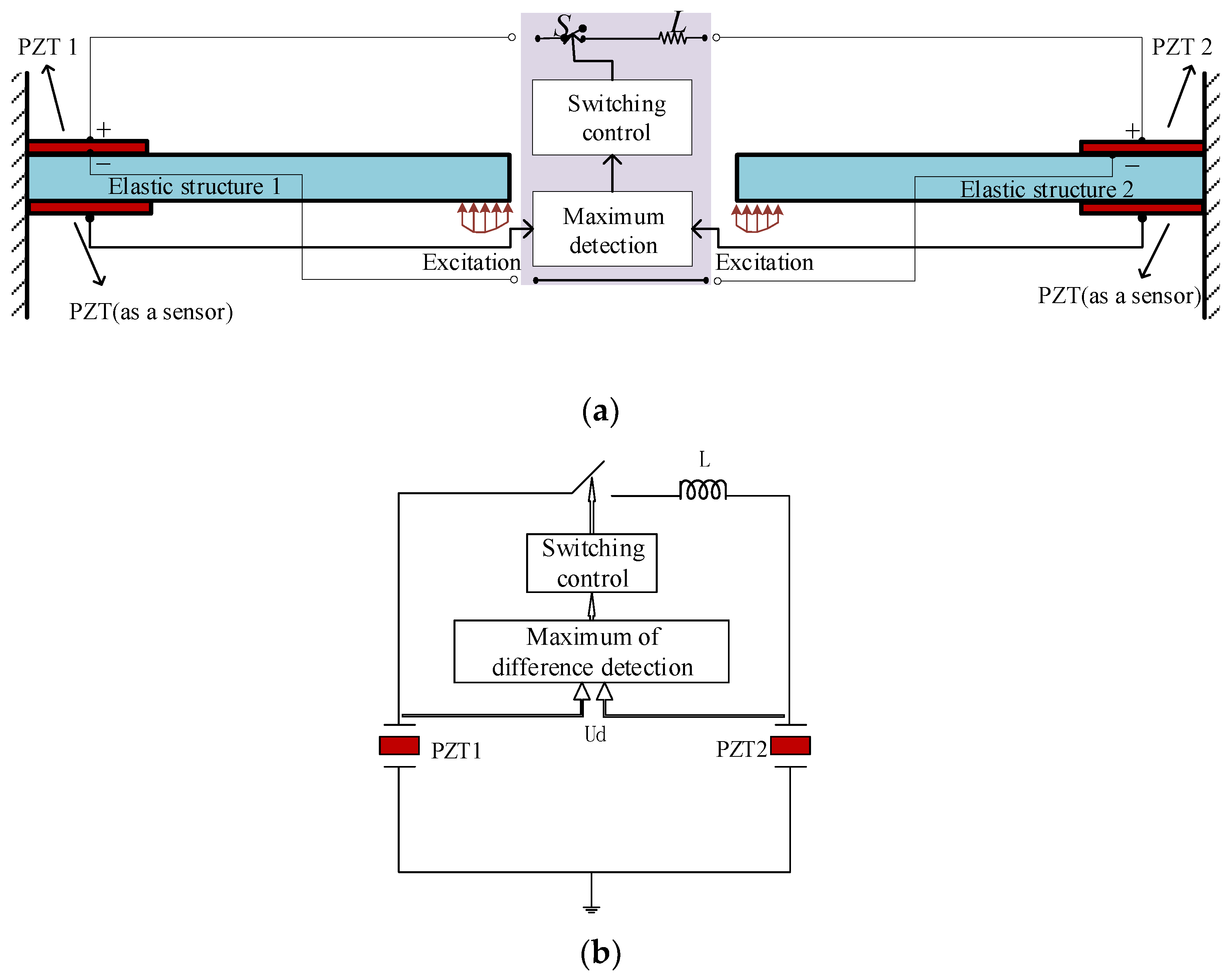
3. Double-Beam System with SSDI Network
3.1. Modeling of the Double-Beam System with SSDI Network
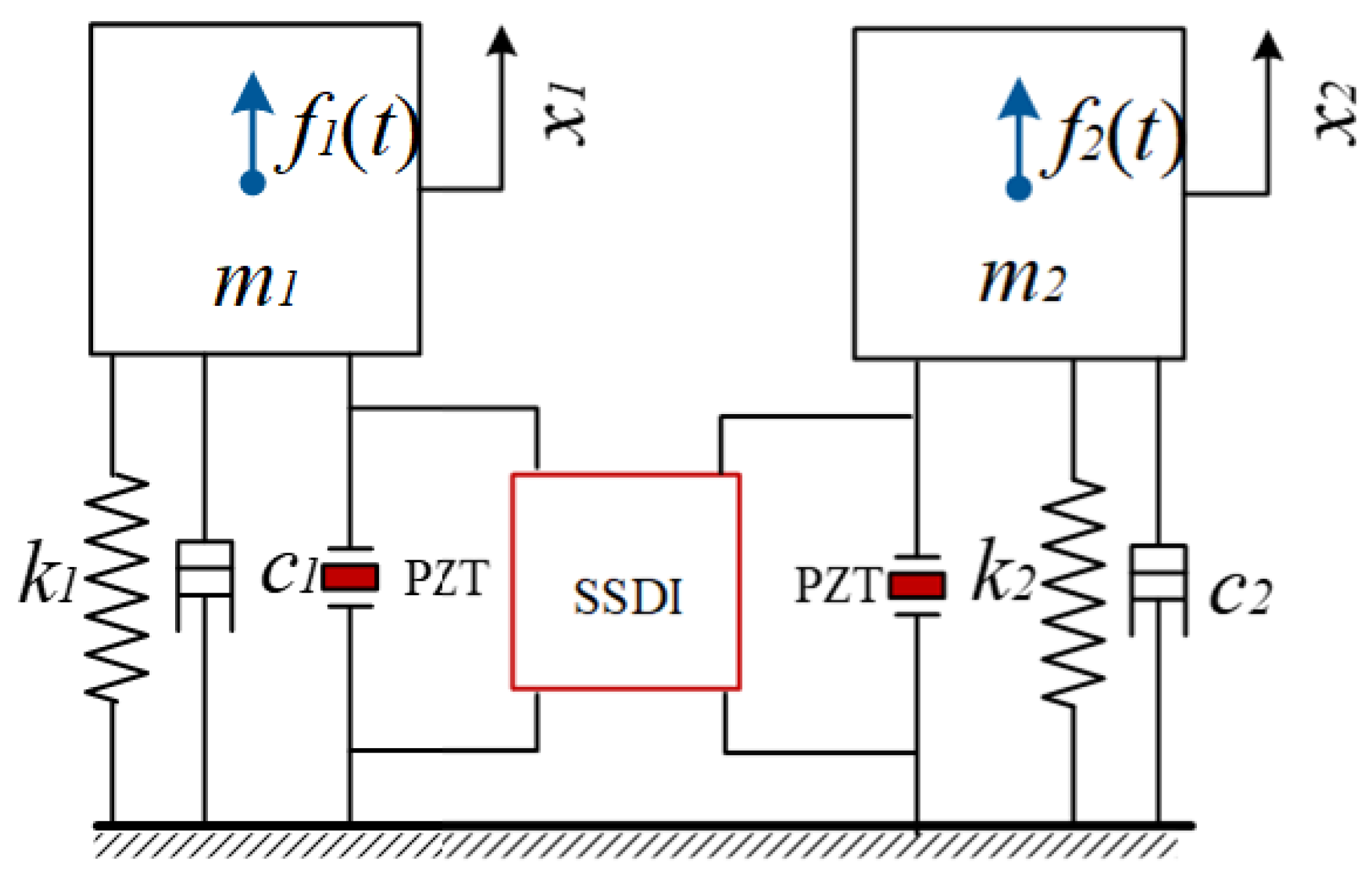
3.2. The Lumped Electromechanical Coupling Model
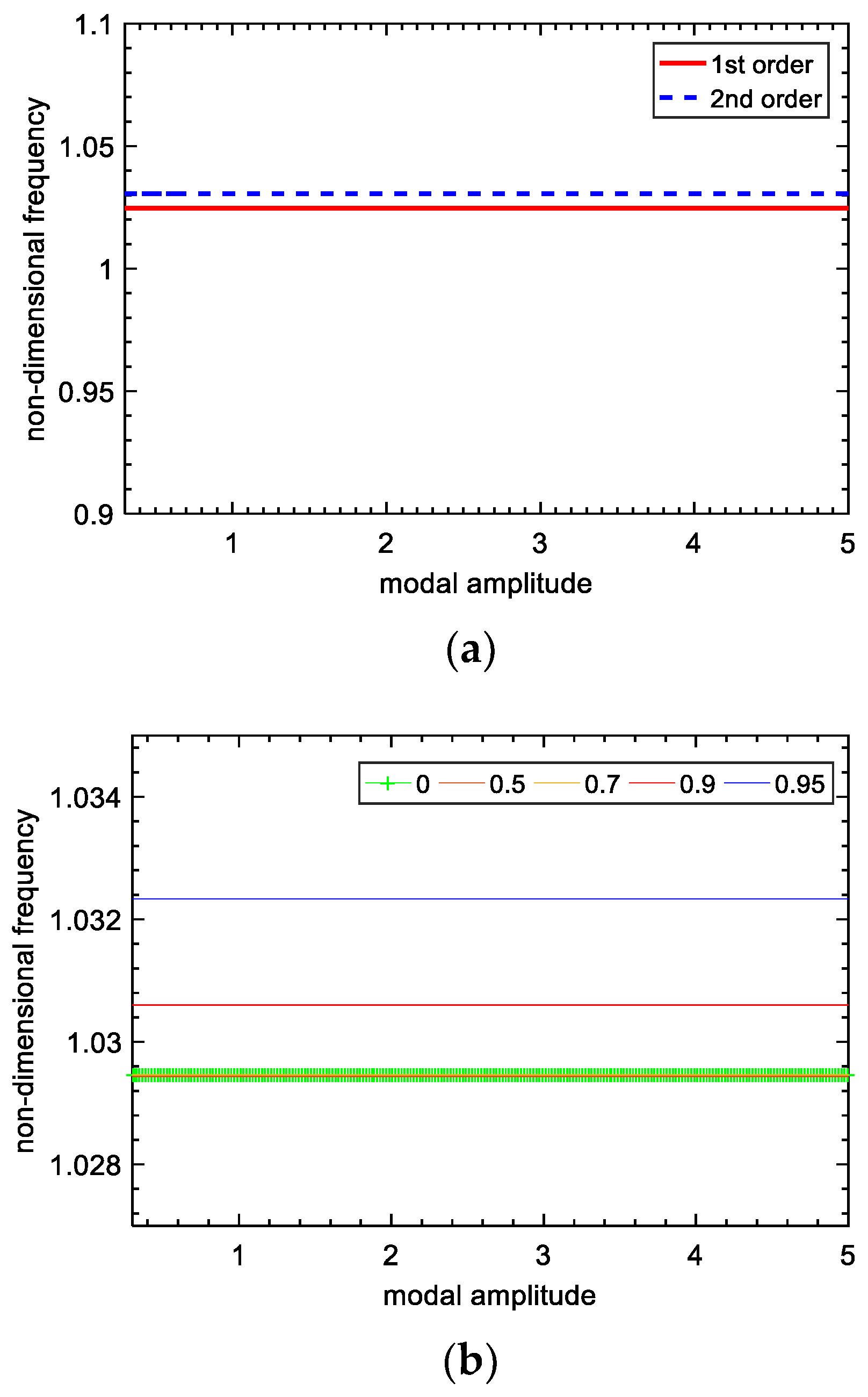
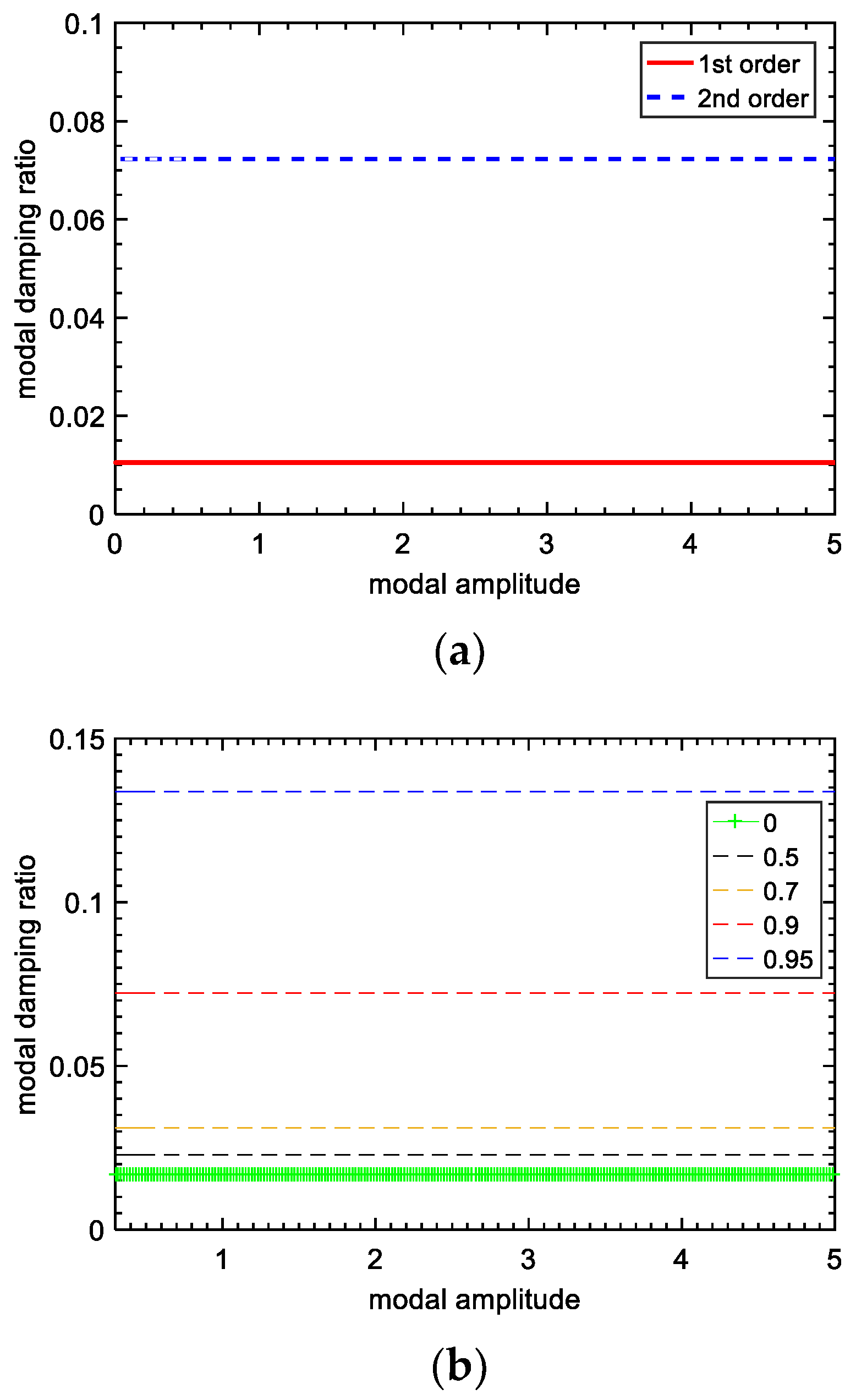
3.3. Nonlinear Complex Modal Analysis
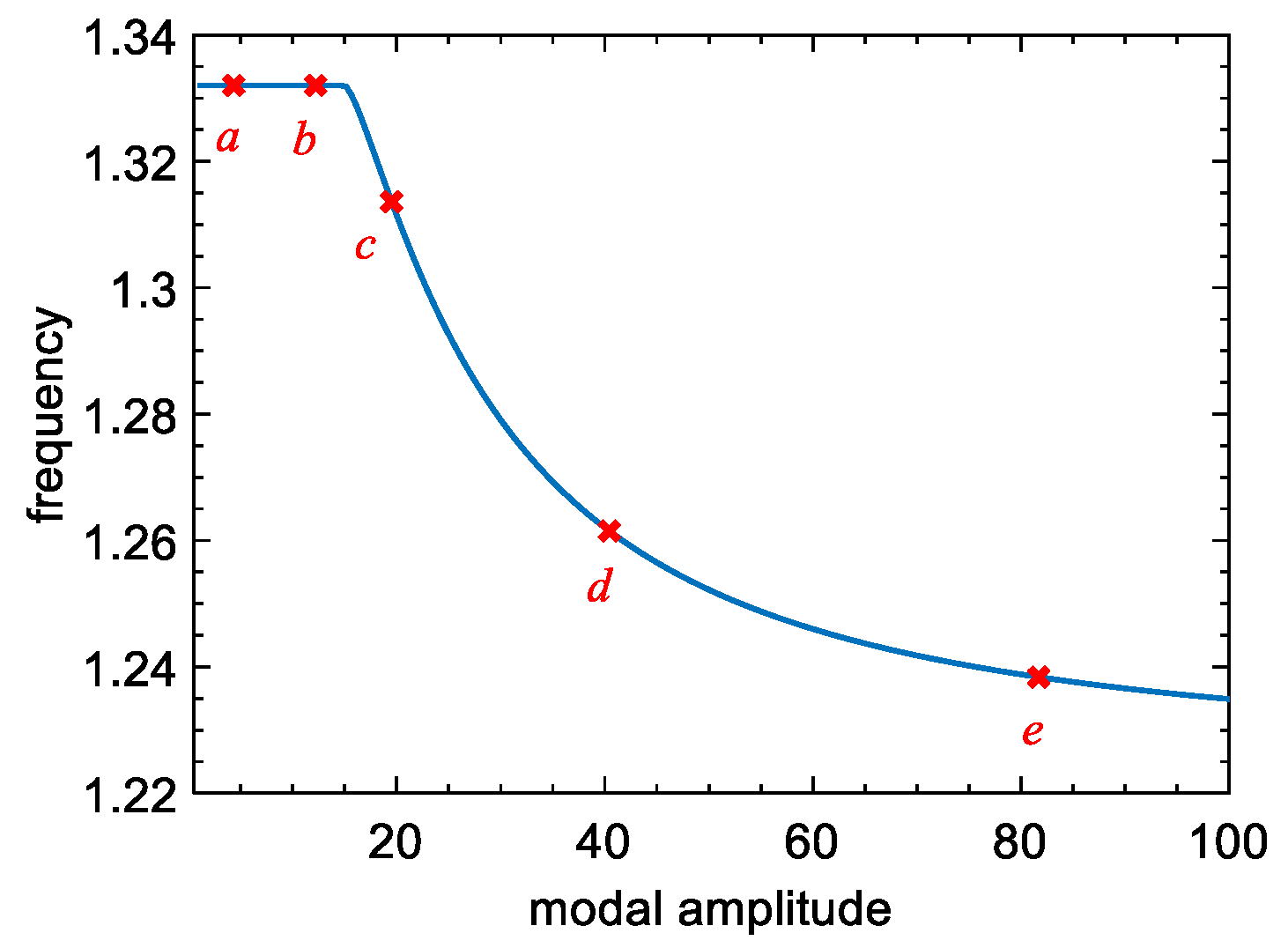
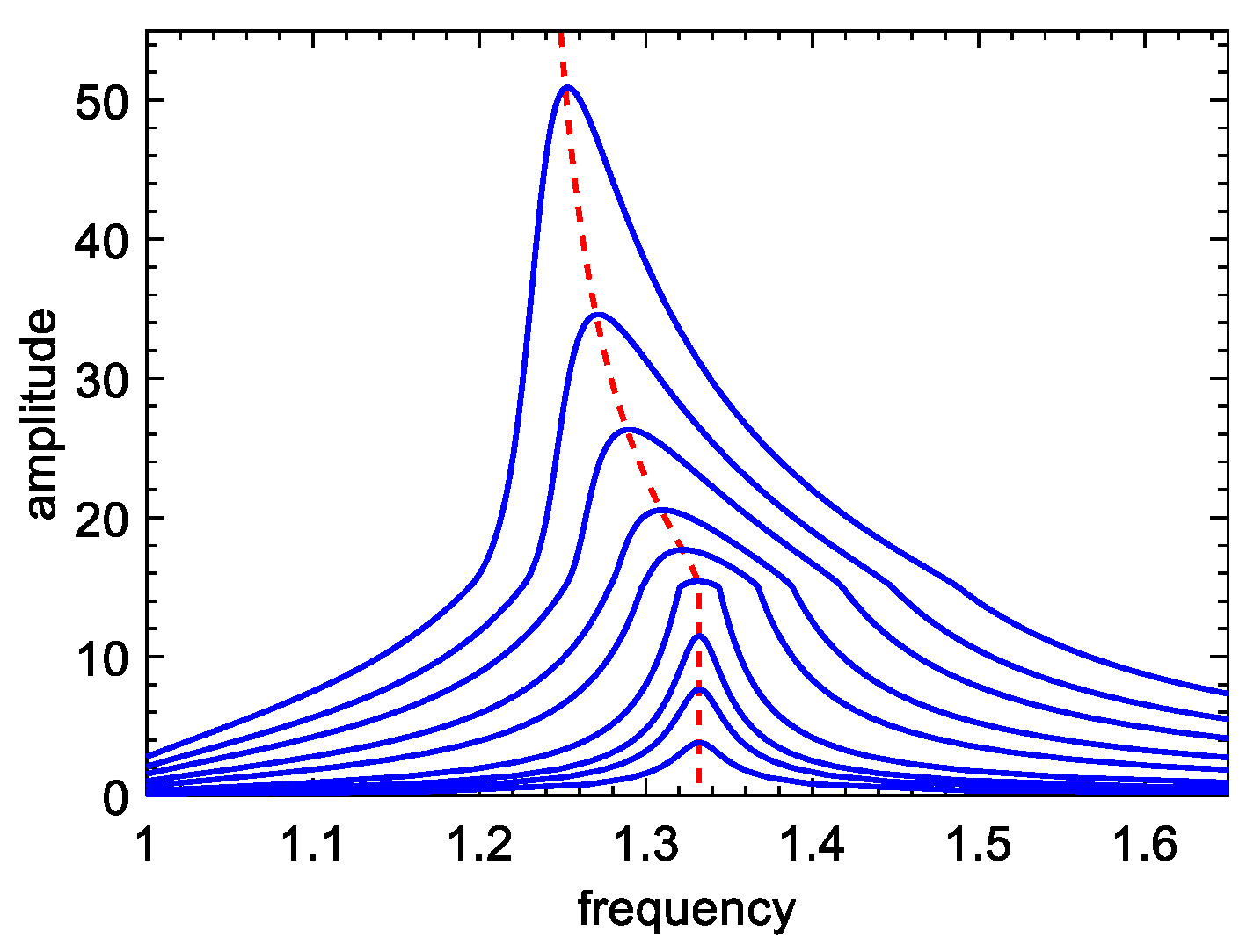
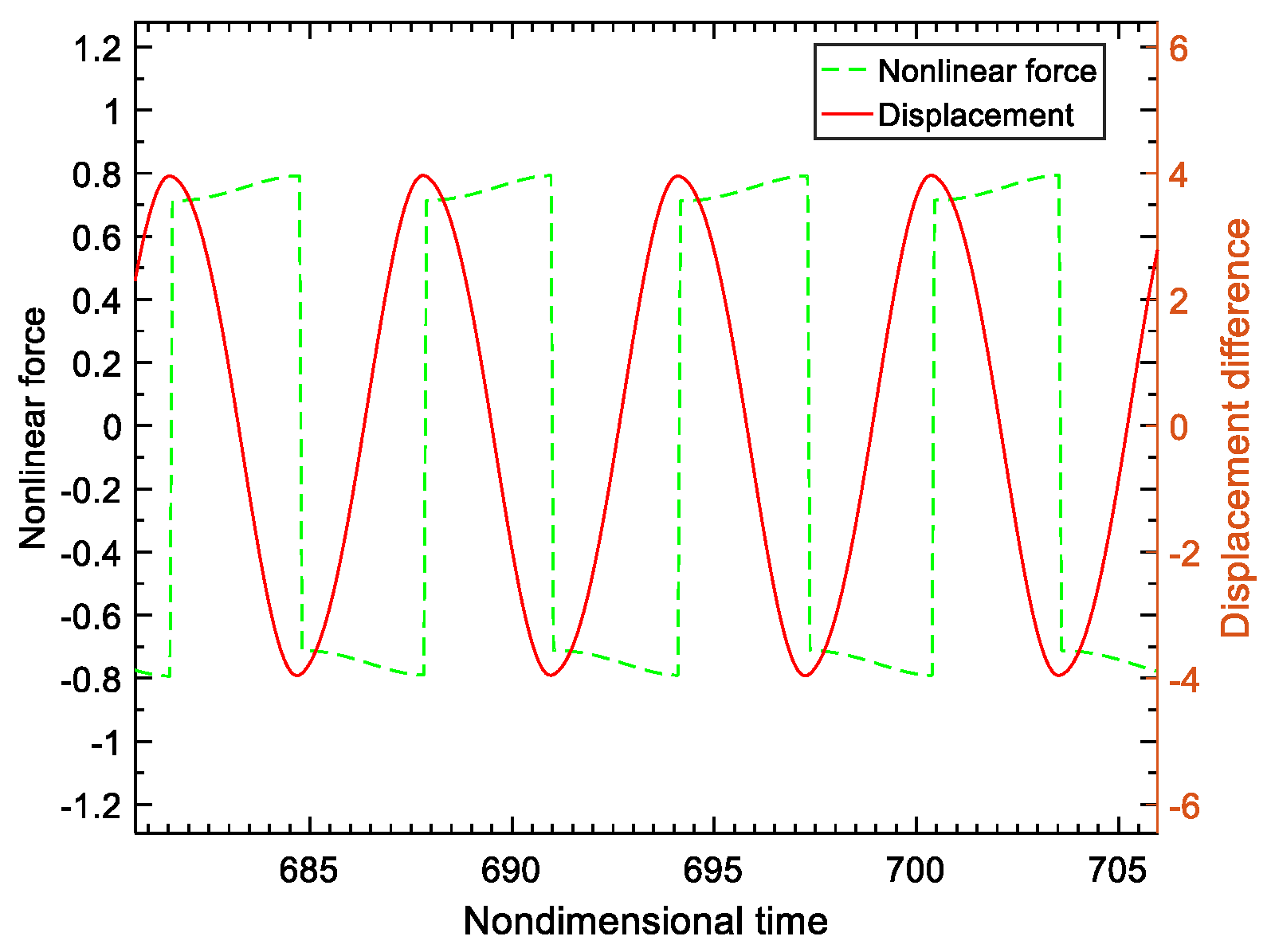
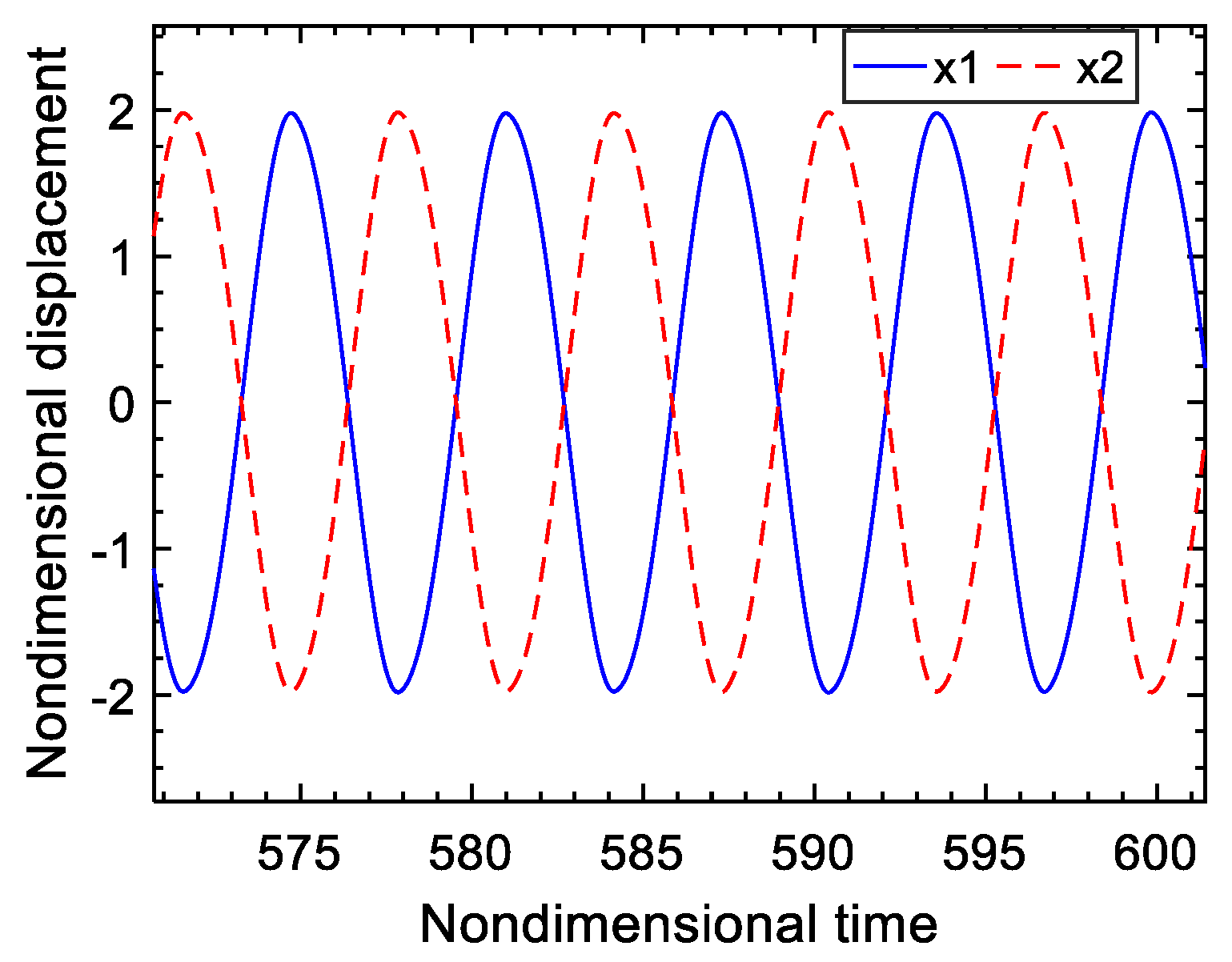
3.4. Forced Response Analysis
4. Experiment Design
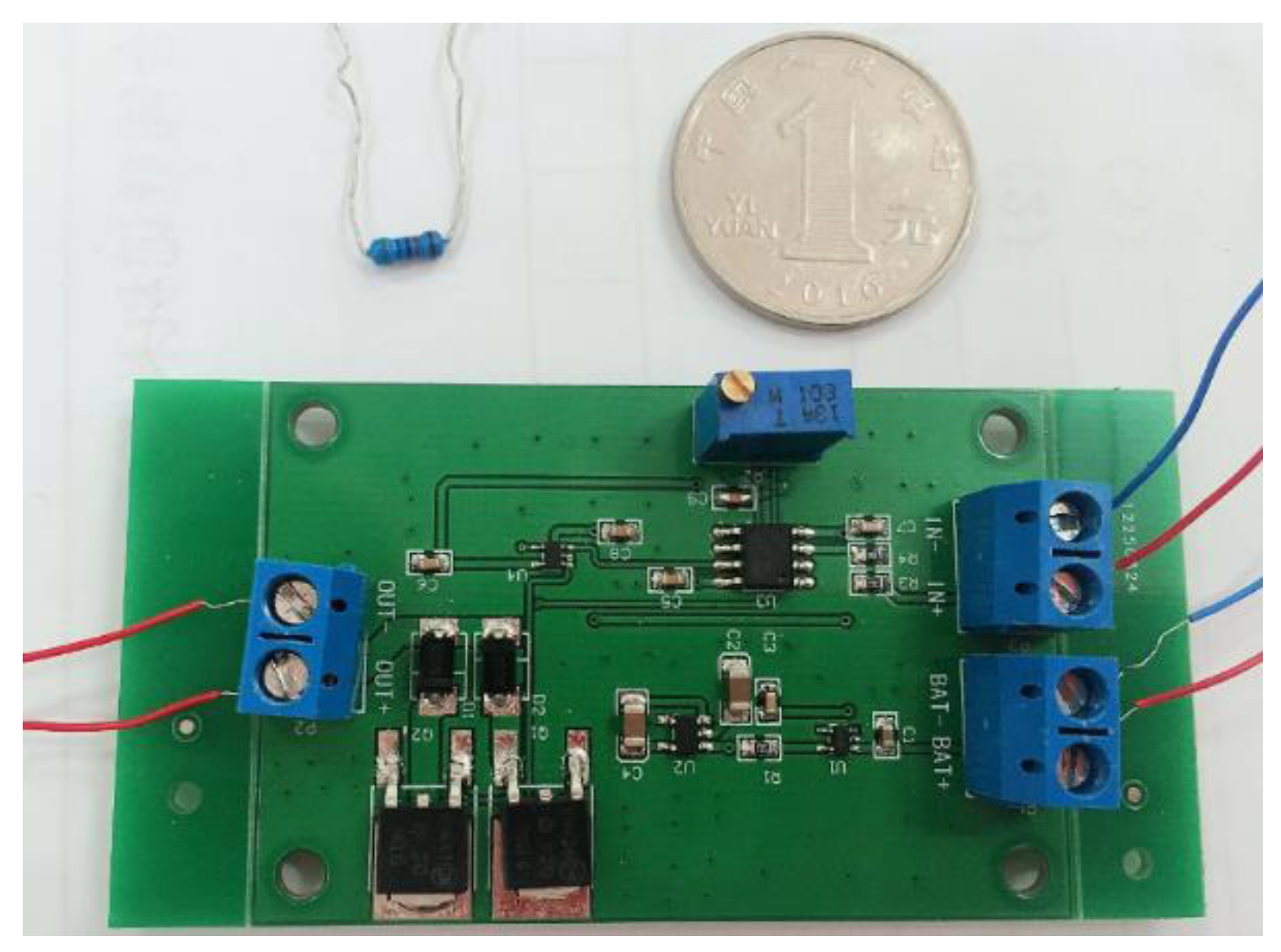
4.1. Implementation of the Low-Power SSDI Circuit
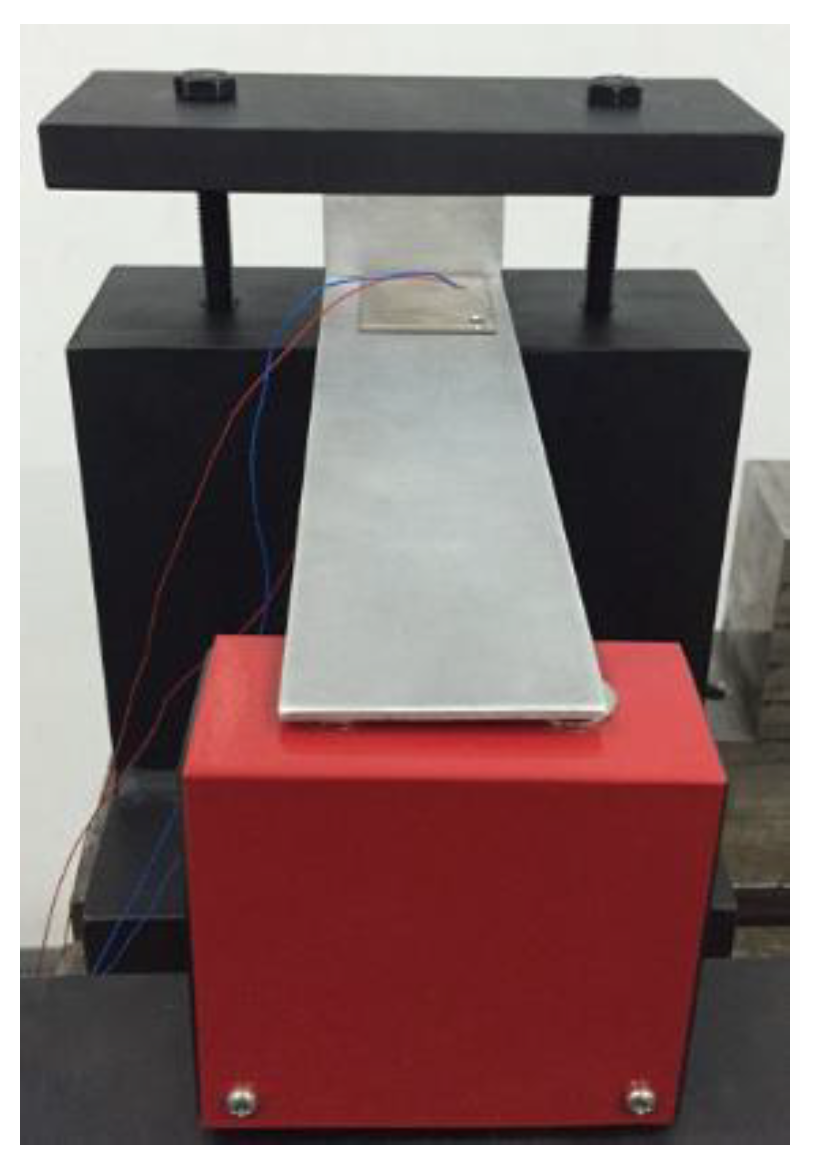
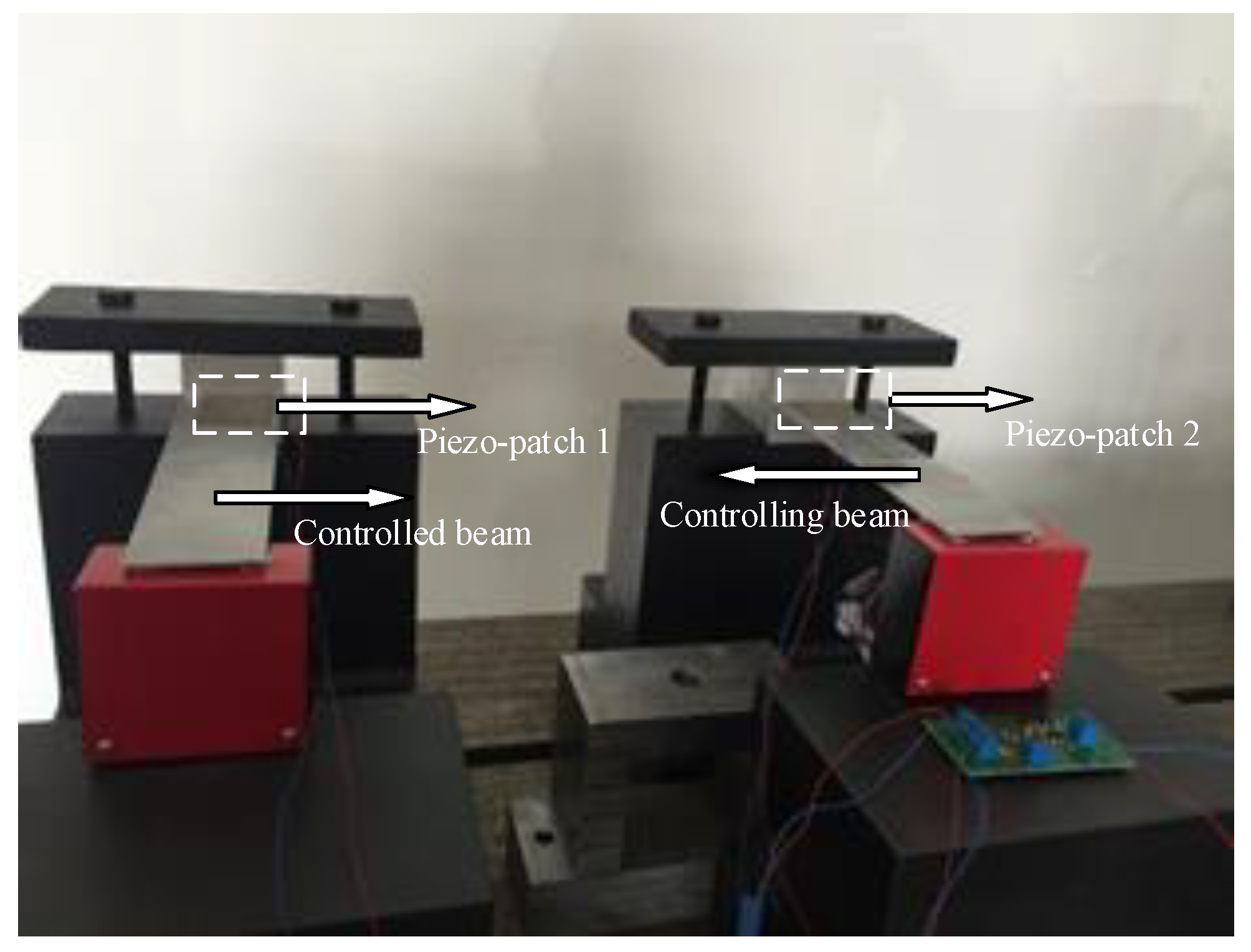
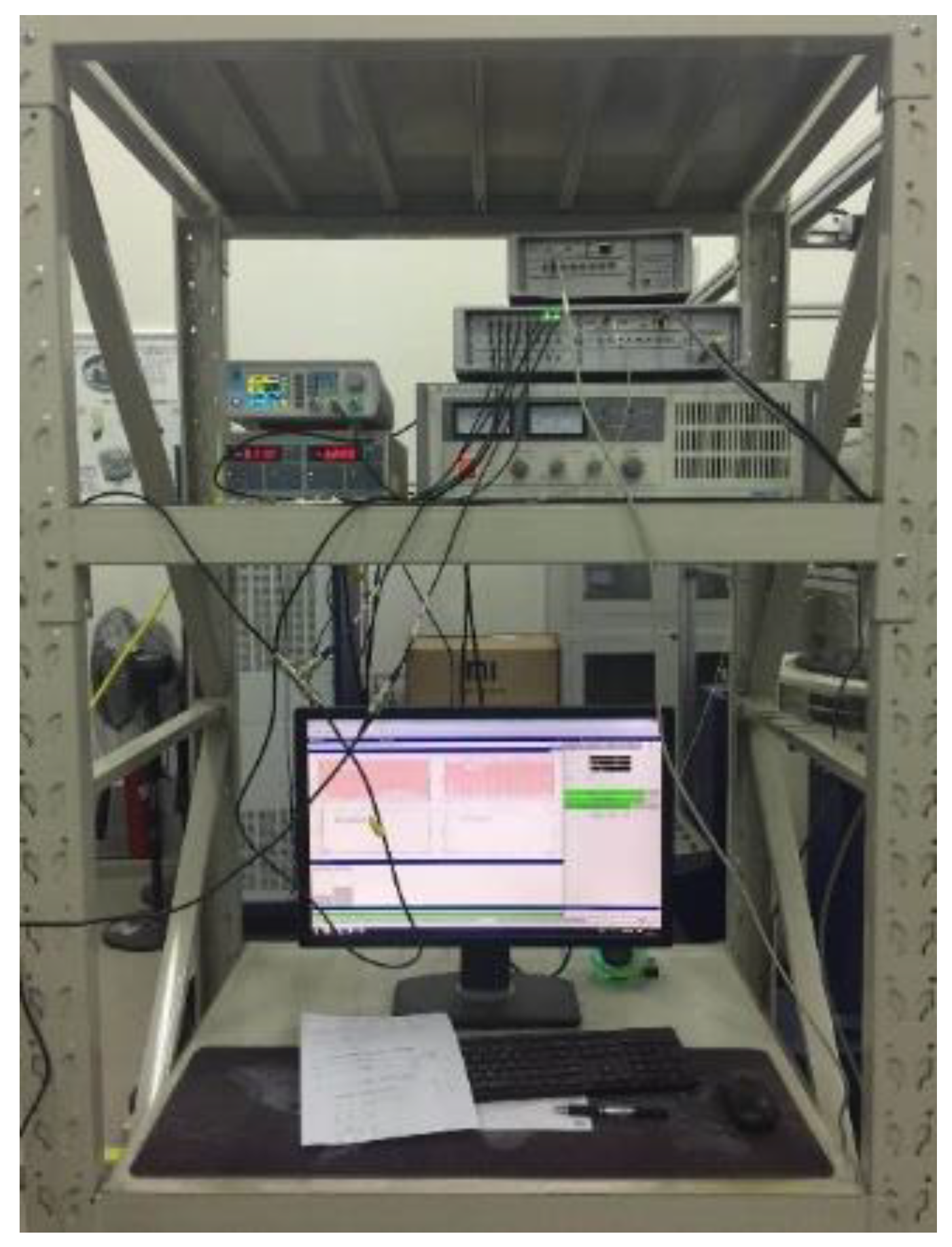
4.2. Experiment Setup
4.2.1. Single-Beam Experiment with SSDI Shunt
4.2.2. Double-Beam Experiment with SSDI Network
5. Experimental Results and Discussions
5.1. Single-Beam System with SSDI Shunt
5.1.1. Vibration Control Performance with Single-Frequency Excitation
5.1.2. Multi-Mode Vibration Control Performance
5.2. Double-Beam System with SSDI Network
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, F.; Li, L.; Fan, Y.; Liu, J. Numerical Analysis and Experimental Verification of Synchronized Switching Damping Systems. In Proceedings of the ASME 2019 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Louisville, KY, USA, 9–11 September 2019. [Google Scholar] [CrossRef]
- Hagood, N.W.; von Flotow, A. Damping of Structural Vibrations with Piezoelectric Materials and Passive Electrical Net-works. J. Sound Vib. 1991, 146, 243–268. [Google Scholar] [CrossRef]
- Davis, C.L.; Lesieutre, G.A. A modal strain energy approach to the prediction of resistivity shunted piezoceramic damping. J. Sound Vib. 1995, 184, 129–139. [Google Scholar] [CrossRef]
- Thomas, O.; Ducarne, J.; Deü, J.-F. Performance of piezoelectric shunts for vibration reduction. Smart Mater. Struct. 2011, 21. [Google Scholar] [CrossRef] [Green Version]
- Ducarne, J.; Thomas, O.; Deü, J.F. Placement and dimension optimization of shunted piezoelectric patches for vibration reduction. J. Sound Vib. 2012, 331, 3286–3303. [Google Scholar] [CrossRef]
- Clark, W.W. Vibration control with state-switching piezoelectric materials. J. Intell. Mater. Syst. Struct. 2000, 11, 263A–271A. [Google Scholar] [CrossRef]
- Richard, C.; Guyomar, D.; Audigier, D.; Ching, G. Semi-passive damping using continuous switching of a piezoelectric device. In Proceedings of the 1999 Symposium on Smart Structures and Materials, San Diego, CA, USA, 1 March 1999. [Google Scholar]
- Jiuzhou, L.; Lin, L.; Yu, F. A comparison between the friction and piezoelectric synchronized switch dampers for blisks. J. Intell. Mater. Syst. Struct. 2018, 29, 2693–2705. [Google Scholar]
- Richard, C.; Guyomar, D.; Audigier, D.; Bassaler, H. Enhanced semi-passive damping using continuous switching of a piezoelectric device on an inductor. In Proceedings of the SPIE’s 7th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 6 March 2000. [Google Scholar]
- Badel, A.; Lagache, M.; Guyomar, D.; Lefeuvre, E.; Richard, C. Finite Element and Simple Lumped Modeling for Flexural Nonlinear Semi-passive Damping. J. Intell. Mater. Syst. Struct. 2007, 18, 727–742. [Google Scholar] [CrossRef]
- Guyomar, D.; Lallart, M. Recent Progress in Piezoelectric Conversion and Energy Harvesting Using Nonlinear Electronic Interfaces and Issues in Small Scale Implementation. Micromachines 2011, 2, 274–294. [Google Scholar] [CrossRef] [Green Version]
- Cherif, A.; Meddad, M.; Eddiai, A.; Zouhair, A.; Zawadzka, A.; Migalska-Zalas, A. Multimodal vibration damping using energy transfer. Opt. Quantum Electron. 2016, 48, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Ji, H.; Qiu, J.; Zhu, K.; Badel, A. Two-mode vibration control of a beam using nonlinear synchronized switching damping based on the maximization of converted energy. J. Sound Vib. 2010, 329, 2751–2767. [Google Scholar] [CrossRef]
- Guyomar, D.; Badel, A. Nonlinear semi-passive multimodal vibration damping: An efficient probabilistic approach. J. Sound Vib. 2006, 294, 249–268. [Google Scholar] [CrossRef]
- Lallart, M.; Lefeuvre, E.; Richard, C.; Guyomar, D. Self-powered circuit for broadband, multimodal piezoelectric vibration control. Sens. Actuators A Phys. 2008, 143, 377–382. [Google Scholar] [CrossRef]
- D’Assunção, D.; De Marqui Junior, C. Applied self-powered semi-passive control for a 2-degree-of-freedom aeroelastic typical sec-tion using shunted piezoelectric materials. J. Intell. Mater. Syst. Struct. 2015, 26, 373–385. [Google Scholar] [CrossRef]
- Qureshi, E.M.; Shen, X.; Chang, L. Self-powered synchronized switch damping on negative capacitance for broadband vibra-tion suppression of flexible structures. Int. J. Appl. Electromagn. Mech. 2015, 49, 105–121. [Google Scholar] [CrossRef]
- Mokrani, B.; Rodrigues, G.; Burda, I.; Bastaits, R.; Preumont, A. Synchronized switch damping on inductor and negative capacitance. J. Intell. Mater. Syst. Struct. 2012, 23, 2065–2075. [Google Scholar] [CrossRef]
- Ji, H.; Qiu, J.; Cheng, J.; Inman, D. Application of a negative capacitance circuit in synchronized switch damping techniques for vi-bration suppression. J. Vib. Acoust. 2011, 133, 041015. [Google Scholar] [CrossRef]
- Liu, J.; Li, L.; Huang, X.; Jezequel, L. Dynamic characteristics of the blisk with synchronized switch damping based on negative capacitor. Mech. Syst. Signal Process. 2017, 95, 425–445. [Google Scholar] [CrossRef]
- Bao, B.; Lallart, M.; Guyomar, D. Manipulating elastic waves through piezoelectric metamaterial with nonlinear electrical switched Dual-connected topologies. Int. J. Mech. Sci. 2020, 172, 105423. [Google Scholar] [CrossRef]
- Zhou, B.; Thouverez, F.; Lenoir, D. An adaptive control strategy based on passive piezoelectric shunt techniques applied to mistuned bladed disks. J. Comput. Appl. Math. 2013, 246, 289–300. [Google Scholar] [CrossRef]
- Zhou, B.; Thouverez, F.; Lenior, D. Vibration reduction of mistuned bladed disks by passive piezoelectric shunt damping techniques. AIAA J. 2014, 52, 1–13. [Google Scholar] [CrossRef]
- Hohl, A.; Neubauer, M.; Schwarzendahl, S.M.; Panning, L.; Wallaschek, J. Active and semiactive vibration damping of turbine blades with piezoceramics. In Active and Passive Smart Structures and Integrated Systems 2009; International Society for Optics and Photonics: Washington, DC, USA, 2009. [Google Scholar]
- Tang, J.; Wang, K.W.; Zhang, J.H. Vibration control of rotationally periodic structures using passive piezoelectric shunt net-works and active compensation. J. Vib. Acoust. 1999, 121, 379–390. [Google Scholar] [CrossRef]
- Tang, J.; Wang, K.W. Vibration Delocalization of Nearly Periodic Structures Using Coupled Piezoelectric Networks. J. Vib. Acoust. 2003, 125, 95–108. [Google Scholar] [CrossRef]
- Yu, H.B.; Wang, K.W.; Zhang, J.H. Piezoelectric networking with enhanced electromechanical coupling for vibration delo-calization of mistuned periodic structure—Theory and experiment. J. Sound Vib. 2006, 295, 246–265. [Google Scholar] [CrossRef]
- Fan, Y.; Li, L. Vibration Dissipation Characteristics of Symmetrical Piezoelectric Networks with Passive Branches. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2012. [Google Scholar]
- Li, L.; Deng, P.; Fan, Y. Dynamic characteristics of a cyclic-periodic structure with a piezoelectric network. Chin. J. Aeronaut. 2015, 28, 1426–1437. [Google Scholar] [CrossRef] [Green Version]
- Mokrani, B.; Bastaits, R.; Horodinca, M.; Romanescu, I.; Burda, I.; Viguié, R.; Preumont, A. Parallel piezoelectric shunt damping of rotationally periodic structures. Adv. Mater. Sci. Eng. 2015, 2015, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Mokrani, B.; Bastaits, R.; Horodinca, M.; Romanescu, I.; Burda, I.; Viguié, R.; Preumont, A. Piezoelectric Shunt Damping of Rotationally Periodic Structures. Ph.D. Thesis, University of Brussels, Daegu, Korea, 2015. [Google Scholar]
- Zhou, B.; Thouverez, F.; Lenoir, D. Essentially nonlinear piezoelectric shunt circuits applied to mistuned bladed disks. J. Sound Vib. 2014, 333, 2520–2542. [Google Scholar] [CrossRef]
- Cameron, T.M.; Griffin, J.H. An alternation frequency/time domain method for calculation the steady-state response on non-linear dynamic system. J. Appl. Mech. 1989, 56, 149–154. [Google Scholar] [CrossRef] [Green Version]
- Joannin, C.; Chouvion, B.; Thouverez, F.; Ousty, J.-P.; Mbaye, M. A nonlinear component mode synthesis method for the computation of steady-state vibrations in non-conservative systems. Mech. Syst. Signal Process. 2017, 83, 75–92. [Google Scholar] [CrossRef] [Green Version]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | ||||||
|---|---|---|---|---|---|---|
| Value | 1 | 1 | 0.1 | 0.05 | 0.02 | 0.02 |
| Variable | Length (mm) | Width (mm) | Thickness (mm) | Elastic Modulus (Gpa) | Poisson’s Ratio | Density (kg/m3) |
|---|---|---|---|---|---|---|
| Value | 200 | 50 | 2 | 70 | 0.33 | 2700 |
| Variable | Length (mm) | Width (mm) | Thickness (mm) | Elastic Modulus (Gpa) | Density (kg/m3) | Force Factor (N/V) | Inherent Capacitance (nF) |
|---|---|---|---|---|---|---|---|
| value | 43 | 35 | 0.5 | 66 | 7650 | 1.27 × 10−4 | 20 |
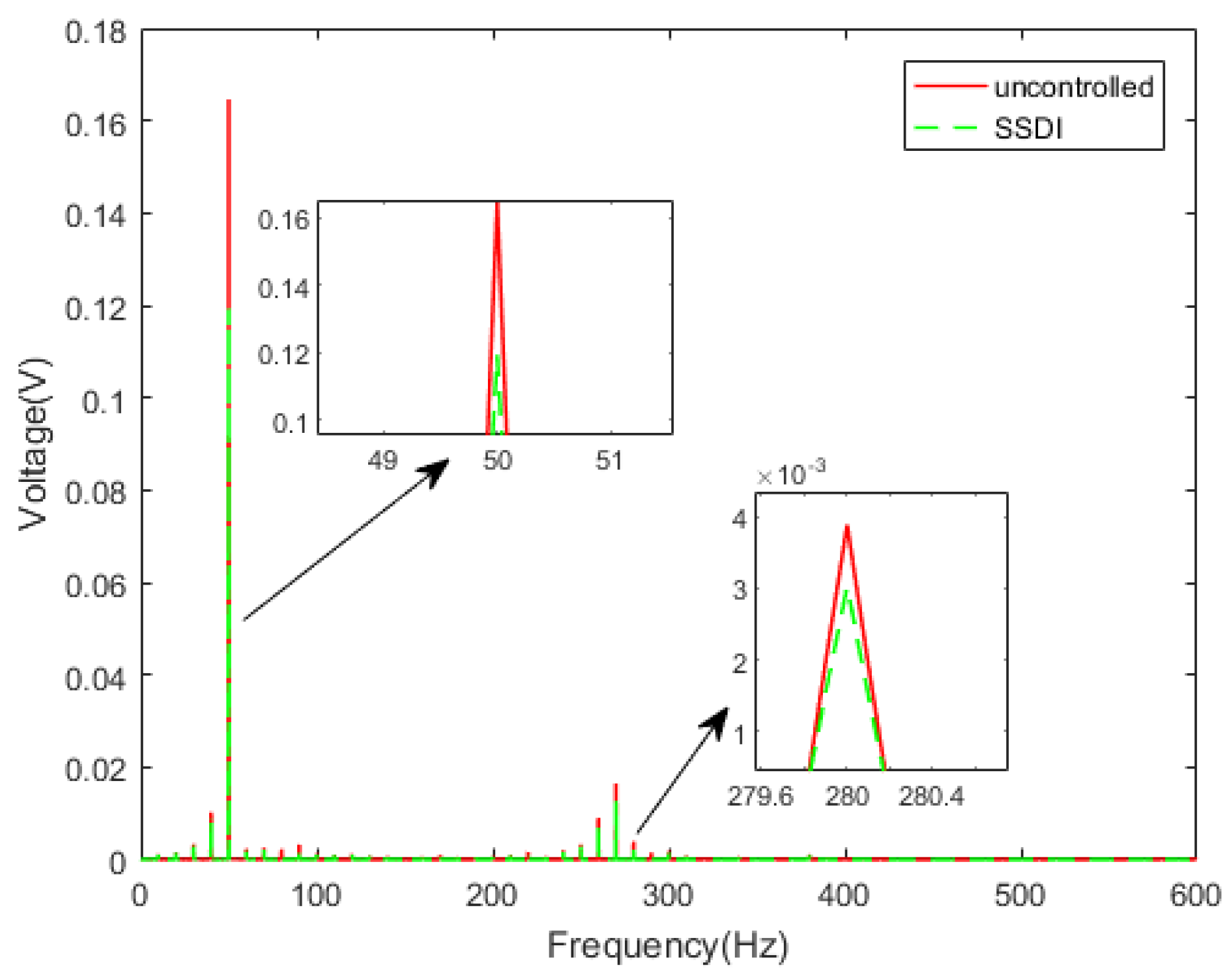
| 1st-Order Frequency (Hz) | Max Displacement (mV) | 2nd-Order Frequency (Hz) | Max Displacement (mV) | |
|---|---|---|---|---|
| Uncontrolled system | 50.05 | 164.6 | 280 | 3.891 |
| SSDI shunt | 50.3 | 119.3 | 280.4 | 3.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Liu, J.; Tian, J. Analysis of the Vibration Suppression of Double-Beam System via Nonlinear Switching Piezoelectric Network. Machines 2021, 9, 115. https://doi.org/10.3390/machines9060115
Zhang F, Liu J, Tian J. Analysis of the Vibration Suppression of Double-Beam System via Nonlinear Switching Piezoelectric Network. Machines. 2021; 9(6):115. https://doi.org/10.3390/machines9060115
Chicago/Turabian StyleZhang, Fengling, Jiuzhou Liu, and Jing Tian. 2021. "Analysis of the Vibration Suppression of Double-Beam System via Nonlinear Switching Piezoelectric Network" Machines 9, no. 6: 115. https://doi.org/10.3390/machines9060115
APA StyleZhang, F., Liu, J., & Tian, J. (2021). Analysis of the Vibration Suppression of Double-Beam System via Nonlinear Switching Piezoelectric Network. Machines, 9(6), 115. https://doi.org/10.3390/machines9060115