
Coil Number Impact on Performance of 4-Phase Low Speed Toothed Doubly Salient Permanent Magnet Motors


 , ,
, ,  ,
,
Abstract
:1. Introduction
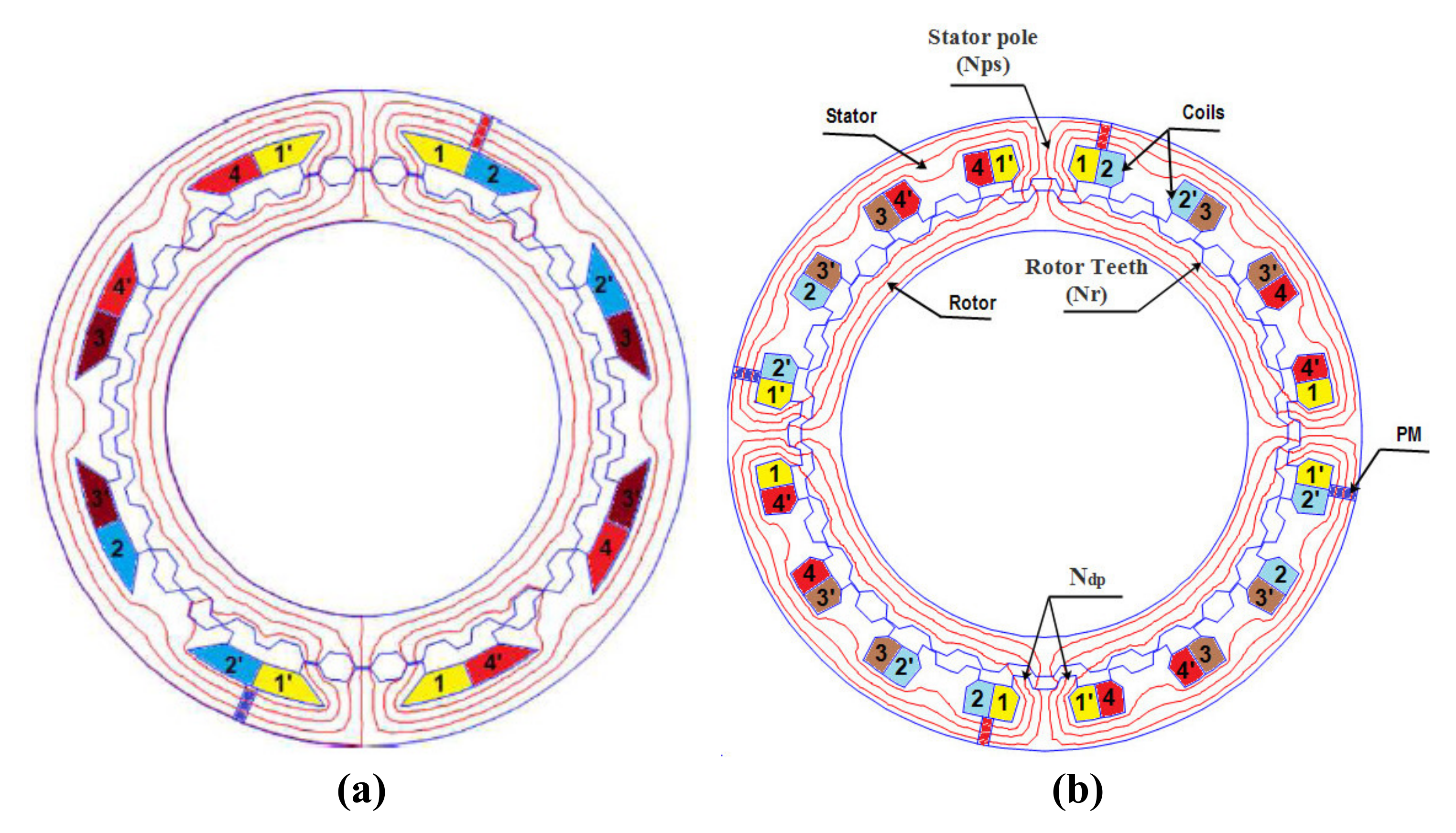
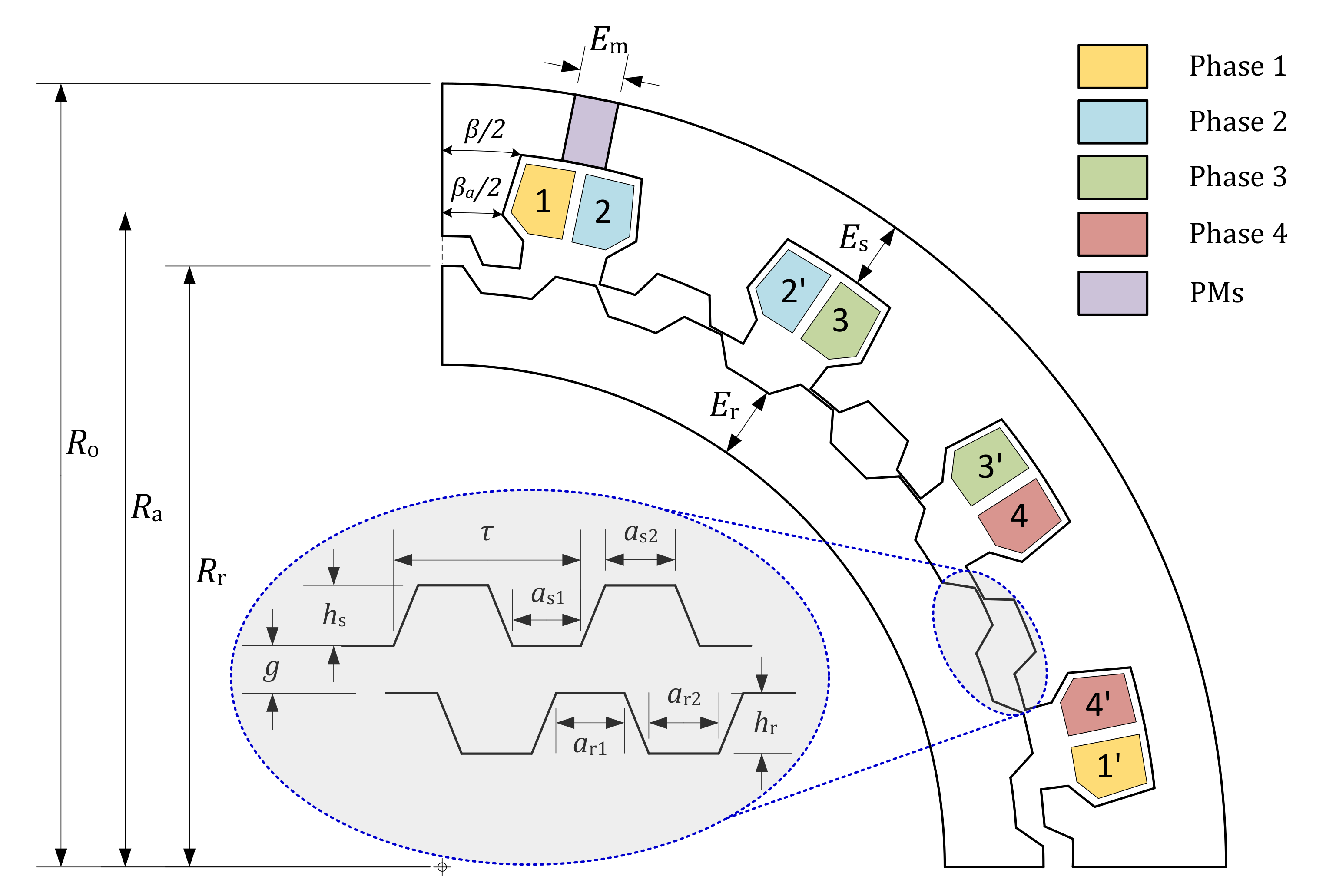
2. Machines Design and Modeling
- Rotor and stator teeth depth and ;
- Teeth cyclic ratio , , , and .
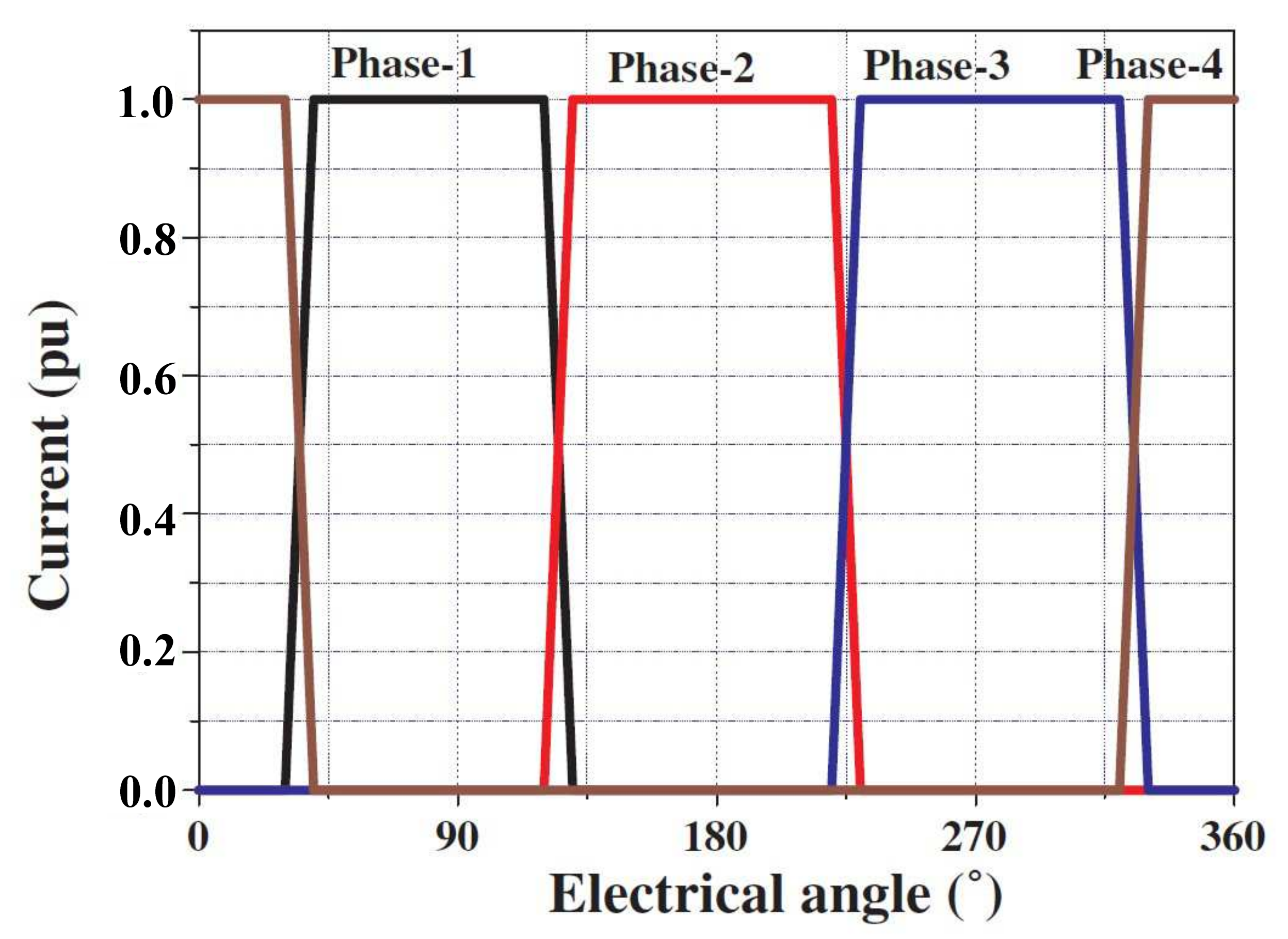
2.1. Average Torque
2.2. EM Calculation Method
- In the conductor part
- In the iron part
- In the air gap part
- In the PM part
3. Design Process and Optimization
4. Results and Discussion
4.1. Objective Function and Torque Evolution
4.2. Efficiency
4.3. Basic Characteristics and Performance Comparison
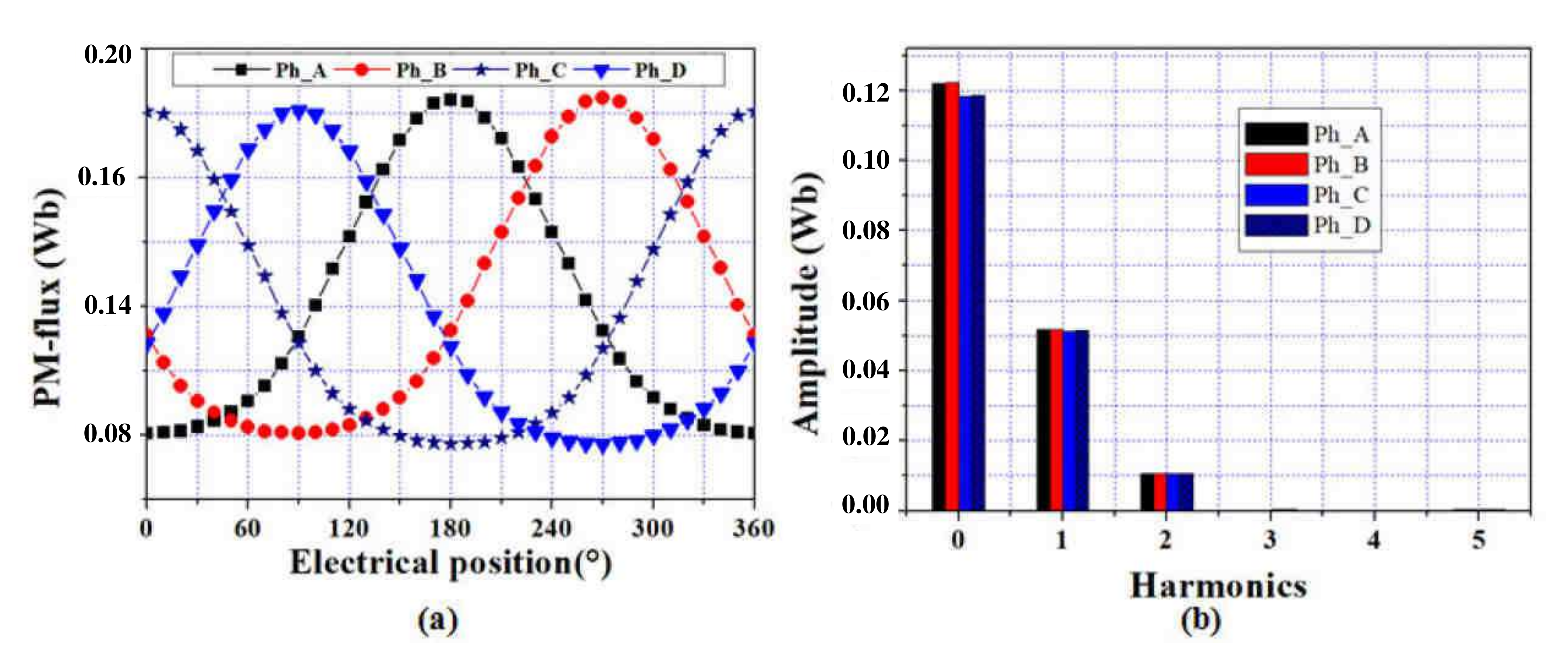
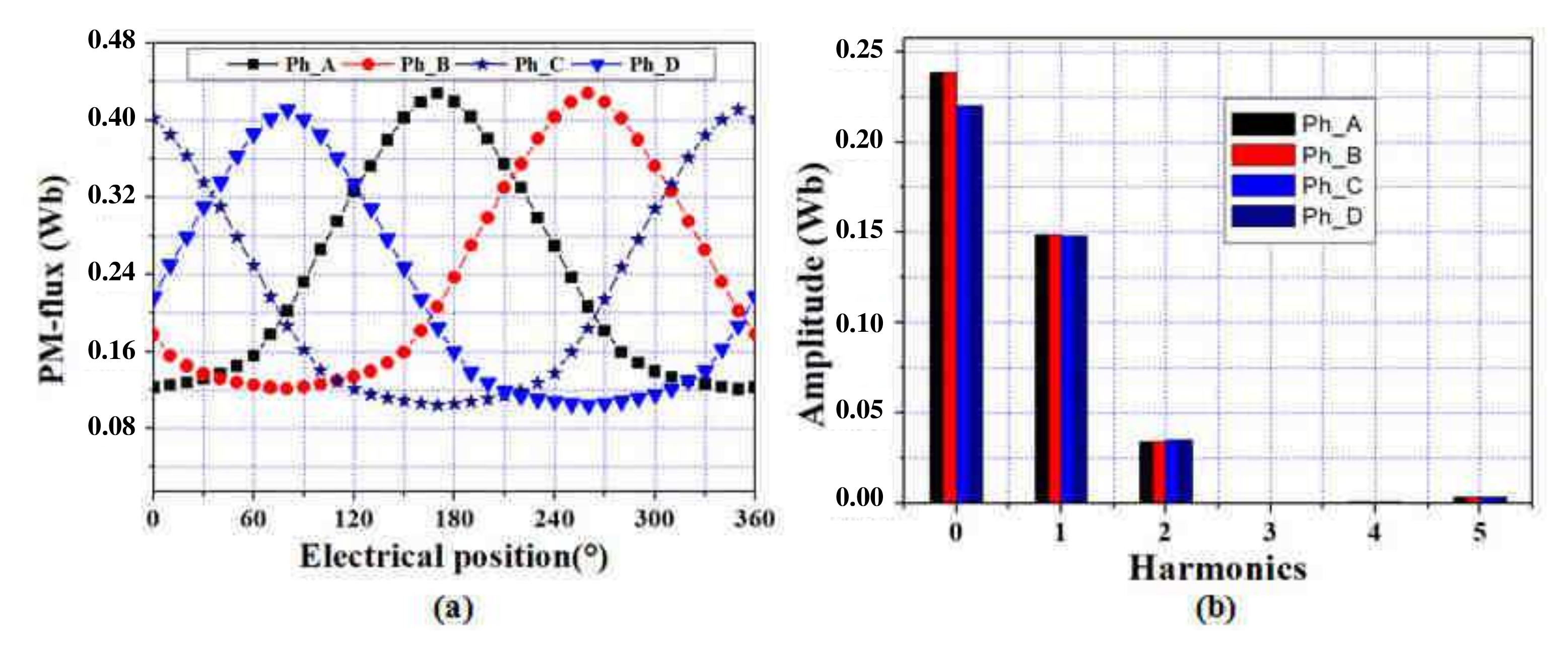
4.3.1. PM-Flux
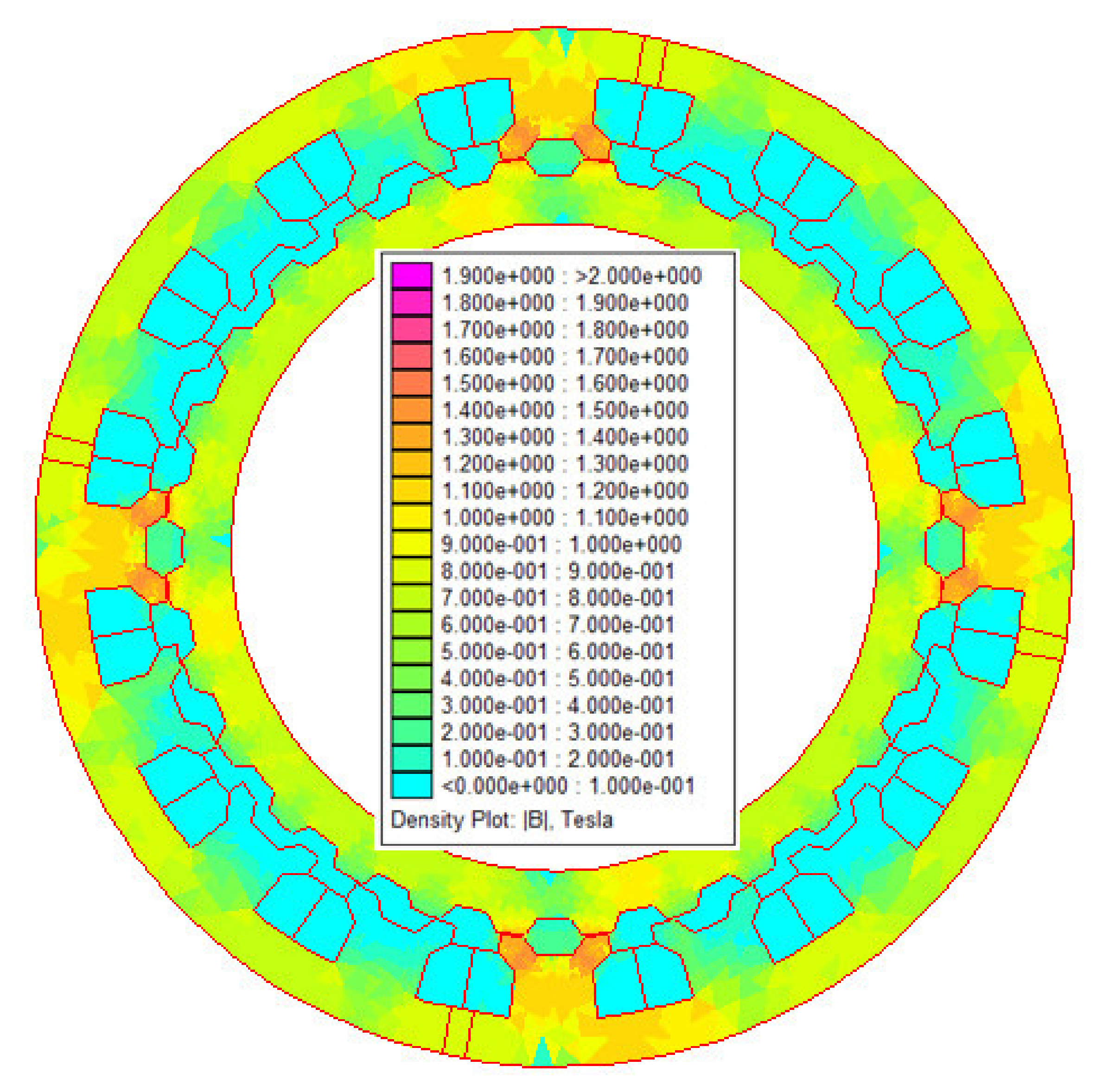
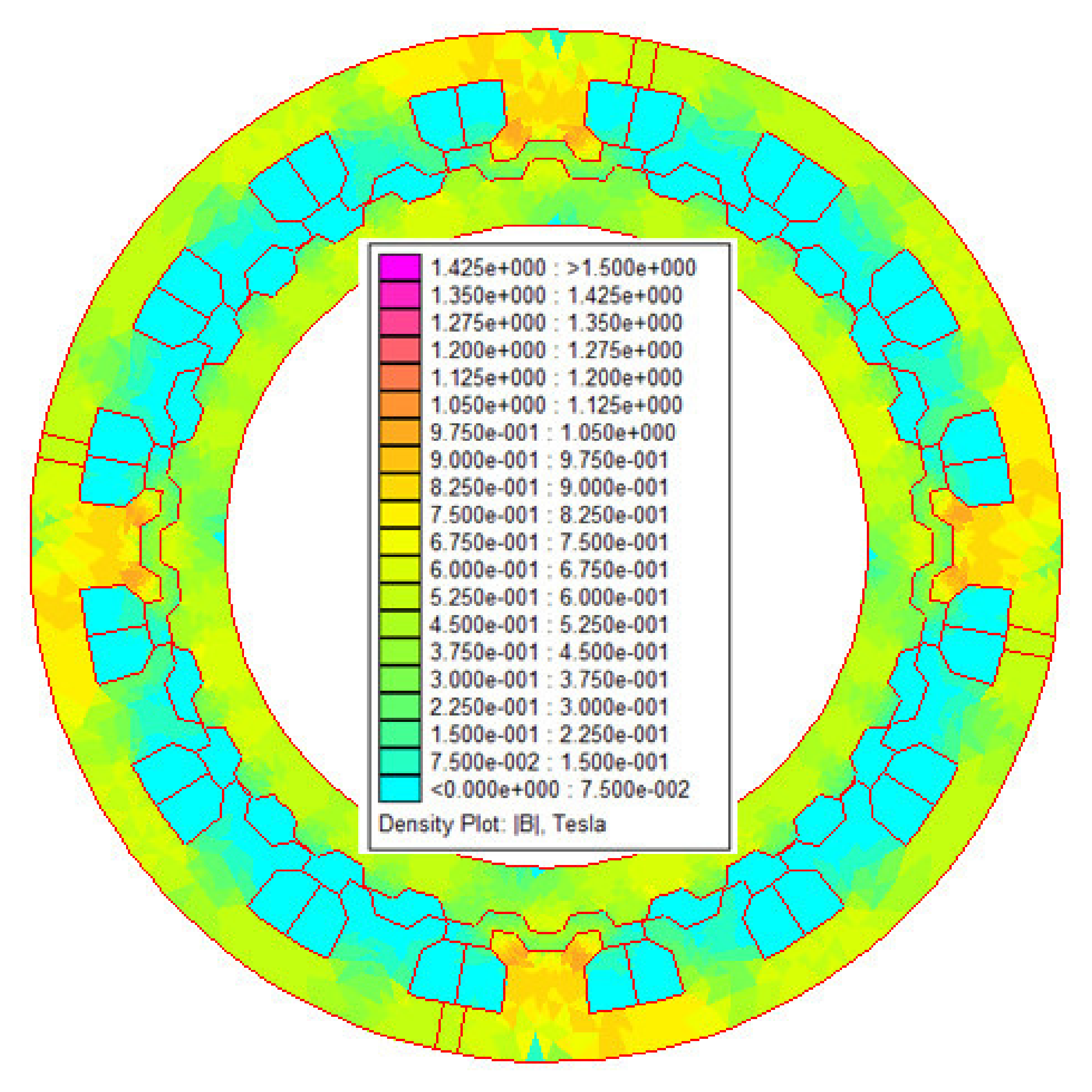
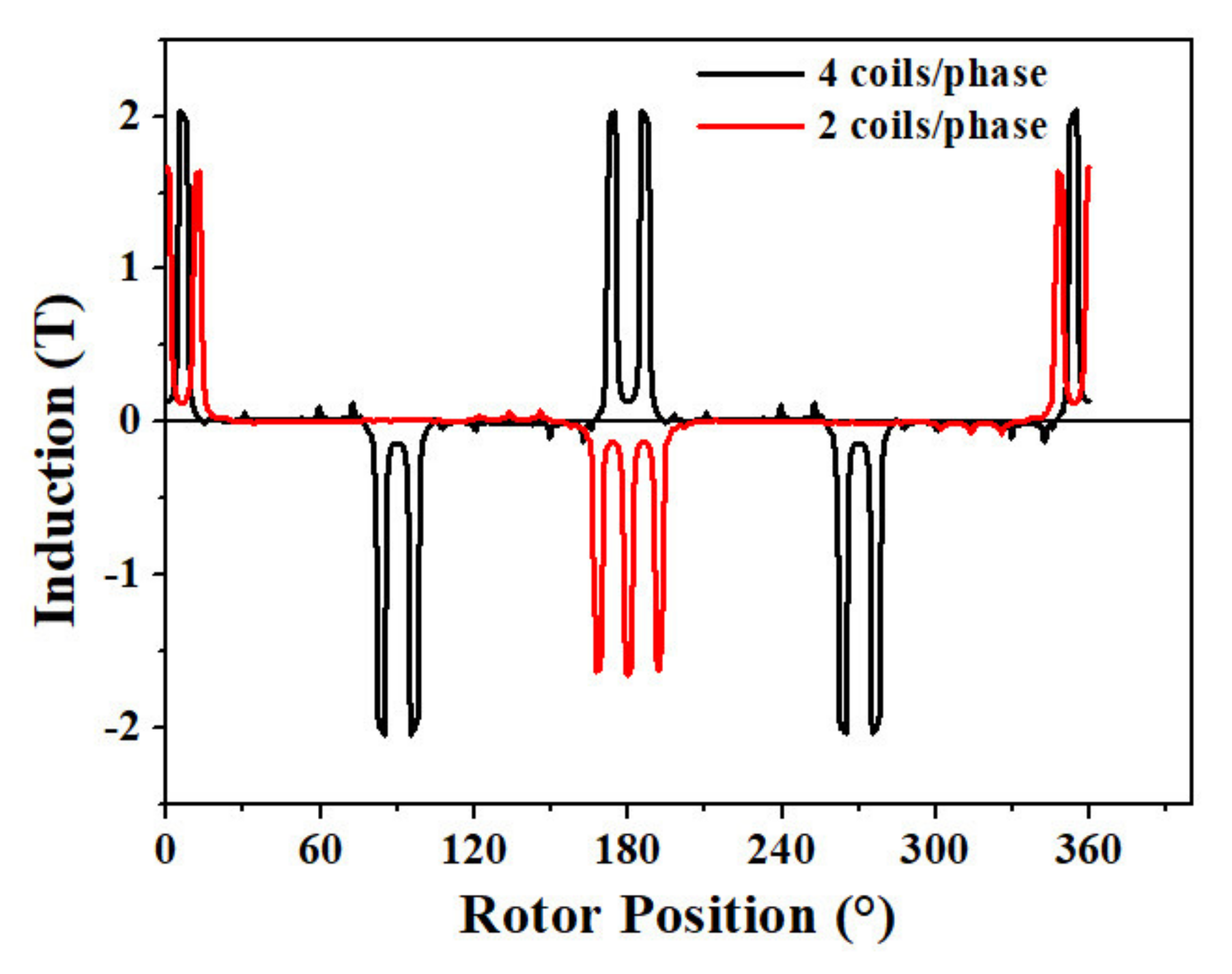
4.3.2. Air-Gap Flux Density
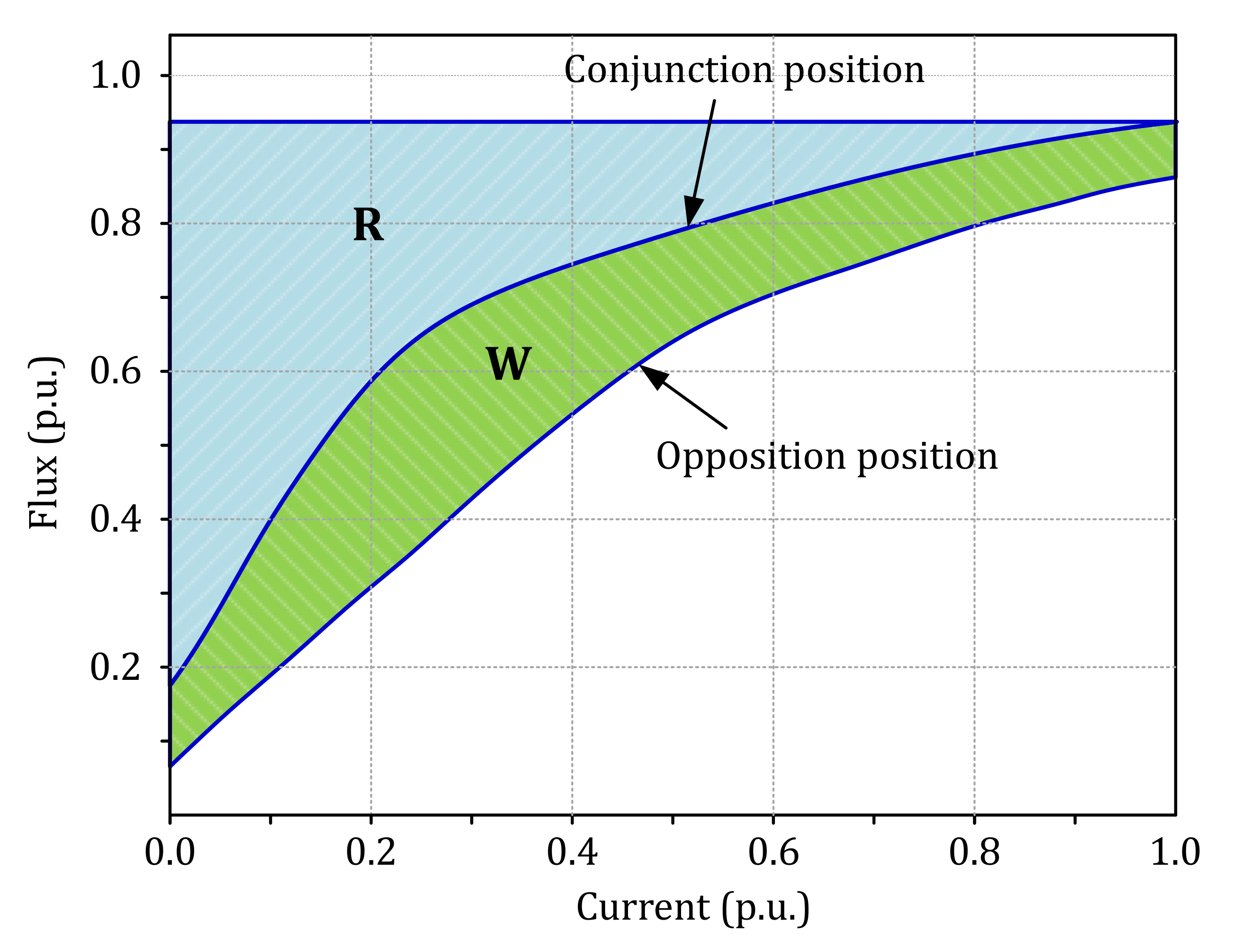
4.3.3. Ripple Torque and Energy Ratio
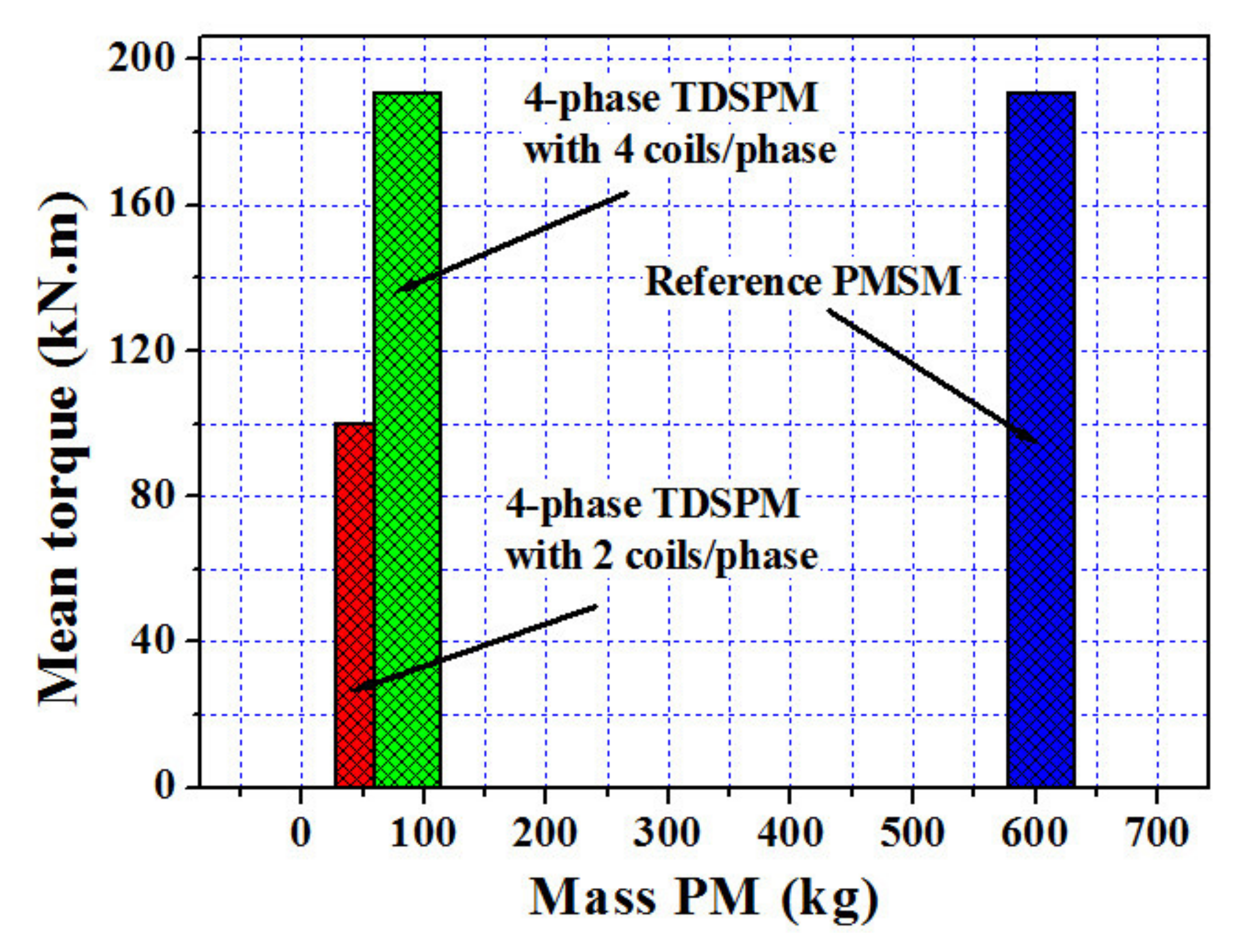
5. Comparison with Reference PMSM
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
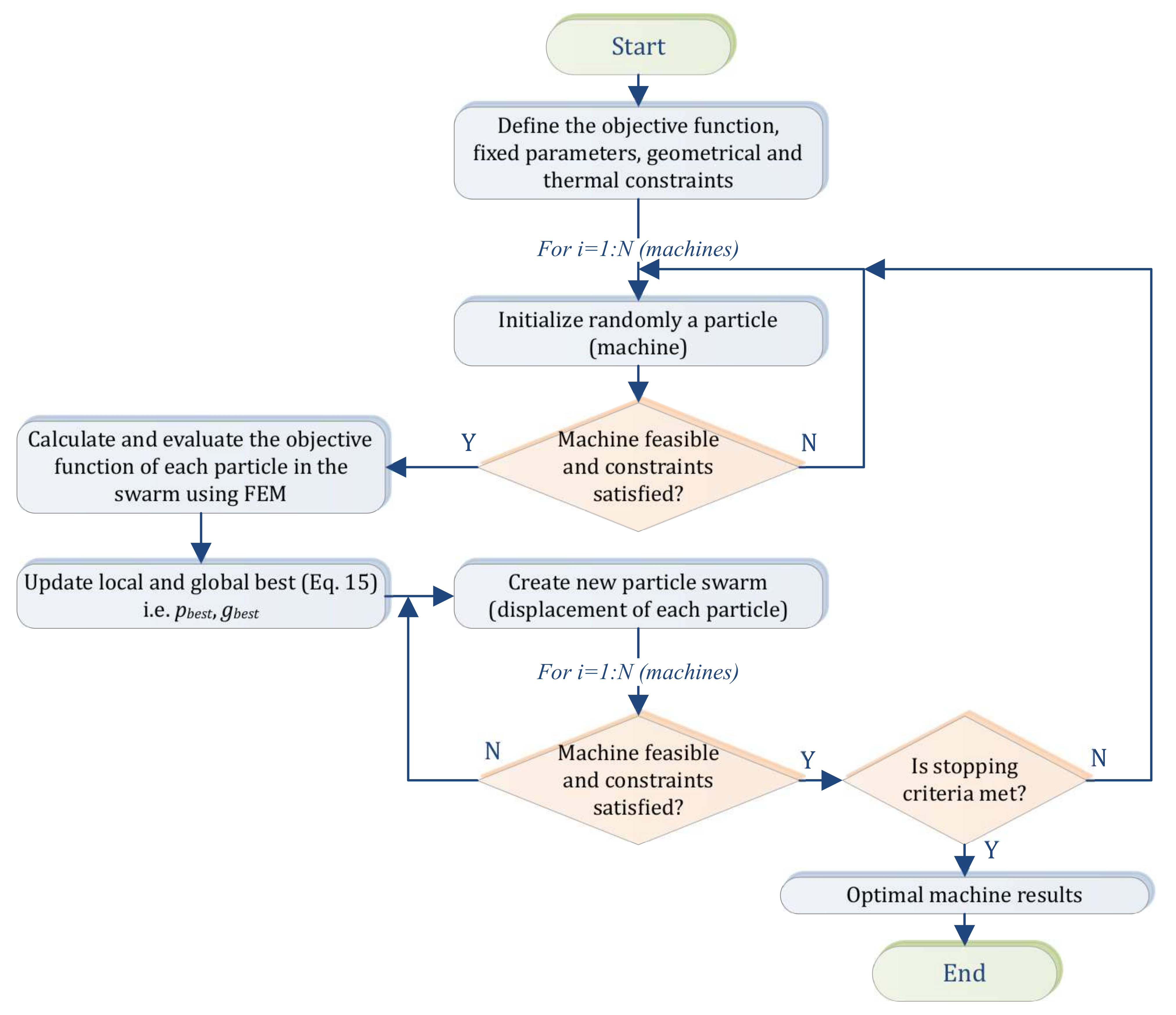
- Define the objective function, fixed parameters, geometrical and thermal constraints.
- For i = 1: N do
- (a)
- Initialize randomly a particle (machine).
- (b)
- If machine is not feasible or thermal constraints is not satisfied return to step 2a.
- (c)
- End
- Calculate and evaluate the objective function of each particle in the swarm using FEMM software (2D-FEA)
- Update local and global best (pbest and gbest )
- For i = 1: N do
- (a)
- Produce new particle (displacement of each particle) using (15)
- (b)
- If machine is not feasible or thermal constraints are not satisfied return to step 5a.
- (c)
- End
- Check if the stop criterion is satisfied; if not return to step 3.
- Output optimal results.
- Stop.
References
- Thongam, J.S.; Tarbouchi, M.; Okou, A.F.; Bouchard, D.; Beguenane, R. Trends in naval ship propulsion drive motor technology. In Proceedings of the 2013 IEEE Electrical Power &Energy Conference, Halifax, NS, Canada, 21–23 August 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Karnavas, Y.L.; Chasiotis, I.D.; Pechlivanidou, M.S.C.; Karamanis, E.K.; Kladas, A.G. Azimuth Thruster PMSM Optimization using Symbiotic Organisms Search Algorithm. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Göthenburg, Sweden, 23–26 August 2020; Volume 1, pp. 2231–2237. [Google Scholar] [CrossRef]
- Lateb, R.; Takorabet, N.; Meibody-Tabar, F.; Mirzaian, A.; Enon, J.; Sarribouette, A. Performances comparison of induction motors and surface mounted PM motor for POD marine propulsion. In Proceedings of the Fourtieth IAS Annual Meeting, Conference Record of the 2005 Industry Applications Conference, Hong Kong, China, 2–6 October 2005; pp. 1342–1349. [Google Scholar] [CrossRef]
- Scuiller, F.; Semail, E.; Charpentier, J.-F.; Letellier, P. Multi-criteria-based design approach of multi-phase permanent magnet low-speed synchronous machines. IET Electr. Power Appl. 2009, 3, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Saou, R.; Zaïm, M.E.H.; Alitouche, K. Optimal Designs and Comparison of the Doubly Salient Permanent Magnet Machine and Flux-reversal Machine in Low-speed Applications. Electr. Power Components Syst. 2008, 36, 914–931. [Google Scholar] [CrossRef]
- Guerroudj, C.; Saou, R.; Boulayoune, A.; El-hadi Zaïm, M.; Moreau, L. Performance Analysis of Vernier Slotted Doubly Salient Permanent Magnet Generator for Wind Power. Int. J. Hydrog. Energy 2017, 42, 8744–8755. [Google Scholar] [CrossRef]
- Bekhouche, L.; Saou, R.; Guerroudj, C.; Kouzou, A.; Zaïm, M.E.H. Electromagnetic Torque Ripple Minimization of Slotted Doubly-Salient-Permanent-Magnet Generator for Wind Turbine Applications. Prog. Electromagn. Res. M 2019, 83, 181–190. [Google Scholar] [CrossRef] [Green Version]
- Guerroudj, C.; Zaïm, M.E.H.; Bekhouche, L.; Saou, R.; RAMELI, A. Comparison of Outer and Inner-Rotor toothed Doubly Salient Permanent Magnet Machine. In Proceedings of the 19th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Nancy, France, 29–31 August 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Guerroudj, C.; Karnavas, Y.L.; Charpentier, J.-F.; Chasiotis, I.D.; Bekhouche, L.; Saou, R.; Zaïm, M.E.-H. Design Optimization of Outer Rotor Toothed Doubly Salient Permanent Magnet Generator Using Symbiotic Organisms Search Algorithm. Energies 2021, 14, 2055. [Google Scholar] [CrossRef]
- Rezzoug, A.; Zaïm, M.E.H. Non-Conventional Electrical Machines; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Guerroudj, C.; Boulayoune, A.; Saou, R.; Zaïm, M.E.H.; Moreau, L. Study of Vernier effect on the EMF of a slotted DSPM generator for wind power applications. In Proceedings of the Conference Internationale des Energies Renouvelables, Sousse, Tunisia, 19–21 December 2015. [Google Scholar]
- Guerroudj, C.; Saou, R.; Charpentier, J.F.; Boulayoune, A. Optimal Design of a Novel Doubly Salient Permanent Magnet Motors for High Power Ship Propulsion. In Proceedings of the 2018 XXIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 2556–2562. [Google Scholar] [CrossRef]
- Pechlivanidou, M.C.; Chasiotis, I.D.; Karnavas, Y.L. A Comparative Study on 2D and 3D Magnetic Field Analysis of Permanent Magnet Synchronous Motor using FEM Simulations. J. Electromagn. Waves Appl. 2019, 33, 2215–2241. [Google Scholar] [CrossRef]
- Karnavas, Y.L.; Chasiotis, I.D.; Korkas, C.D.; Amoutzidis, S.K. Modelling and Multi-Objective Optimization Analysis of a Permanent Magnet Synchronous Motor Design. Int. J. Numer. Model. Electron. Netw. Devices Fields 2017, 30, e2232. [Google Scholar] [CrossRef]
- Chasiotis, I.D.; Karnavas, Y.L. A Generic Multi-Criteria Design Approach Toward High Power Density and Fault-Tolerant Low-Speed PMSM for Pod Applications. IEEE Trans. Transp. Electrif. 2019, 5, 356–370. [Google Scholar] [CrossRef]
- Symington, W.P.; Belle, A.; Nguyen, H.D.; Binns, J.R. Emerging technologies in marine electric propulsion. Proc. Inst. Mech. Eng. Part J. Eng. Marit. Environ. 2016, 230, 187–198. [Google Scholar] [CrossRef]
- McCoy, T.J.; Amy, J.V. The state-of-the-art of integrated electric power and propulsion systems and technologies on ships. In Proceedings of the 2009 IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009; pp. 340–344. [Google Scholar] [CrossRef]
- Kirtley, K.; James, L.; Banerjee, A.; Englebretson, S. Motors for ship propulsion. Proc. IEEE. 2015, 2320–2332. [Google Scholar] [CrossRef]
- Sargos, F.M.; Zaskalicky, P.; Gudefin, E.J. Generalized theory of the structures of reluctance step motors. In Proceedings of the Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993; pp. 211–216. [Google Scholar] [CrossRef]
- Fan, Y.; Chau, K.T.; Cheng, M. A new three-phase doubly salient permanent magnet machine for wind power generation. IEEE Trans. Ind. Appl. 2006, 42, 53–60. [Google Scholar] [CrossRef] [Green Version]
- Boldea, I.; Tutelea, L. Reluctance Electric Machines: Design and Control; Taylor & Francis Group: New York, NY, USA, 2018. [Google Scholar]
- Hendershot, J.R.; Miller, T.; John, E. Design of Brushless Permanent-Magnet Machines; JMotor Design Books: Venice, FL, USA, 2010. [Google Scholar]
- Pyrhönen, J.; Jokinen, T.; Hrabovcová, V. Design of Rotating Electrical Machines, 2nd ed.; John Wiley & Sons Ltd.: Flatbush, NY, USA, 2014. [Google Scholar]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Boulayoune, A.; Guerroudj, C.; Saou, R.; Zaïm, M.E.H. Optimisation par Algorithme génétique et Essaim de particule d une machine a inversion de Flux dédiée à l’éolien. Rev. Roum. Sci. Techn. Électrotechn. et Énerg 2017, 62, 19–24. [Google Scholar]
- Bertotti, G. Physical interpretation of eddy current losses in ferromagnetic materials. I. Theoretical considerations. J. Appl. Phys. 1985, 57, 2110–2117. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | |
| Power output (MW) | 2 |
| Rated torque (kNm) | 191 |
| Nominal frequency (Hz) | 50 |
| Speed (rpm) | 100 |
| Geometrical and thermal constraints | |
| Stator outer diameter (m) | 1.83 |
| Active axial length (m) | 1.125 |
| Air gap g (mm) | 5 |
| Thermal product (RMS) (A/m) | 22.52 × 10 |
| Integer Design Parameters | 2-Coils/Phase | 4-Coils/Phase |
|---|---|---|
| Number of magnet pairs, | 2 | 4 |
| Number of teeth in the stator, | 24 | 32 |
| Number of teeth in the rotor, | 30 | 28 |
| Number of statoric salient poles, | 8 | 16 |
| Number of teeth per statoric pole, | 3 | 2 |
| Search Variable (Vector ) | Lower Limit | Upper Limit |
|---|---|---|
| Stator yoke thickness, | 10 mm | 150 mm |
| Stator and rotor teeth depth, , | 3 mm | 50 mm |
| Magnet thickness, | 5 mm | 100 mm |
| Stator and rotor teeth cyclic ratios, , | 0.15 | 0.50 |
| Stator and rotor teeth cyclic ratios, , | 0.15 | 0.50 |
| Coil height, | 10 mm | 150 mm |
| Slot radius, | /3 | |
| Angular pole opening, | 3 | 11.5 |
| Angular slot opening, | 3 | 11.5 |
| Rotor yoke thickness, | 10 mm | 150 mm |
| Current density, J | 1 A/m | 15 A/m |
| 4 Coils/Phase | 2 Coils/Phase | |
|---|---|---|
| 99.50 mm | 104.39 mm | |
| 84.83 mm | 107.97 mm | |
| 78.64 mm | 75.77 mm | |
| 8.26 | 13.10 | |
| 10.32 | 10.32 | |
| 814.82 mm | 740.26 mm | |
| 0.36 | 0.2 | |
| 0.28 | 0.31 | |
| 0.47 | 0.2 | |
| 0.49 | 0.48 | |
| 25.90 mm | 30 mm | |
| 32.04 mm | 35 mm | |
| 30.30 mm | 35 mm | |
| Iron weight | 11,002.60 kg | 10,993.34 kg |
| Copper weight | 511.68 kg | 990.13 kg |
| Magnet weight | 85.80 kg | 54.92 kg |
| Performance | 2 Coils/Phase | 4 Coils/Phase |
|---|---|---|
| (kNm) | 125.387 | 215.41 |
| (kNm) | 85.408 | 167.698 |
| (kNm) | 100.00 | 190.85 |
| RT | 40% | 25% |
| ER | 62% | 70% |
| Mass–torque ratio (kNm/kg) | 10.44 | 17.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerroudj, C.; Charpentier, J.-F.; Saou, R.; Karnavas, Y.L.; Bracikowski, N.; Zaïm, M.E.-H. Coil Number Impact on Performance of 4-Phase Low Speed Toothed Doubly Salient Permanent Magnet Motors. Machines 2021, 9, 137. https://doi.org/10.3390/machines9070137
Guerroudj C, Charpentier J-F, Saou R, Karnavas YL, Bracikowski N, Zaïm ME-H. Coil Number Impact on Performance of 4-Phase Low Speed Toothed Doubly Salient Permanent Magnet Motors. Machines. 2021; 9(7):137. https://doi.org/10.3390/machines9070137
Chicago/Turabian StyleGuerroudj, Cherif, Jean-Frederic Charpentier, Rachid Saou, Yannis L. Karnavas, Nicolas Bracikowski, and Mohammed El-Hadi Zaïm. 2021. "Coil Number Impact on Performance of 4-Phase Low Speed Toothed Doubly Salient Permanent Magnet Motors" Machines 9, no. 7: 137. https://doi.org/10.3390/machines9070137
APA StyleGuerroudj, C., Charpentier, J. -F., Saou, R., Karnavas, Y. L., Bracikowski, N., & Zaïm, M. E. -H. (2021). Coil Number Impact on Performance of 4-Phase Low Speed Toothed Doubly Salient Permanent Magnet Motors. Machines, 9(7), 137. https://doi.org/10.3390/machines9070137