
A Novel Method for Harmonic Current Injection with Sensor Supported Adaptation on Permanent Magnet Synchronous Machines


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fundamentals
2.1. Harmonic Current Injection for Permanent Magnet Synchronous Machines
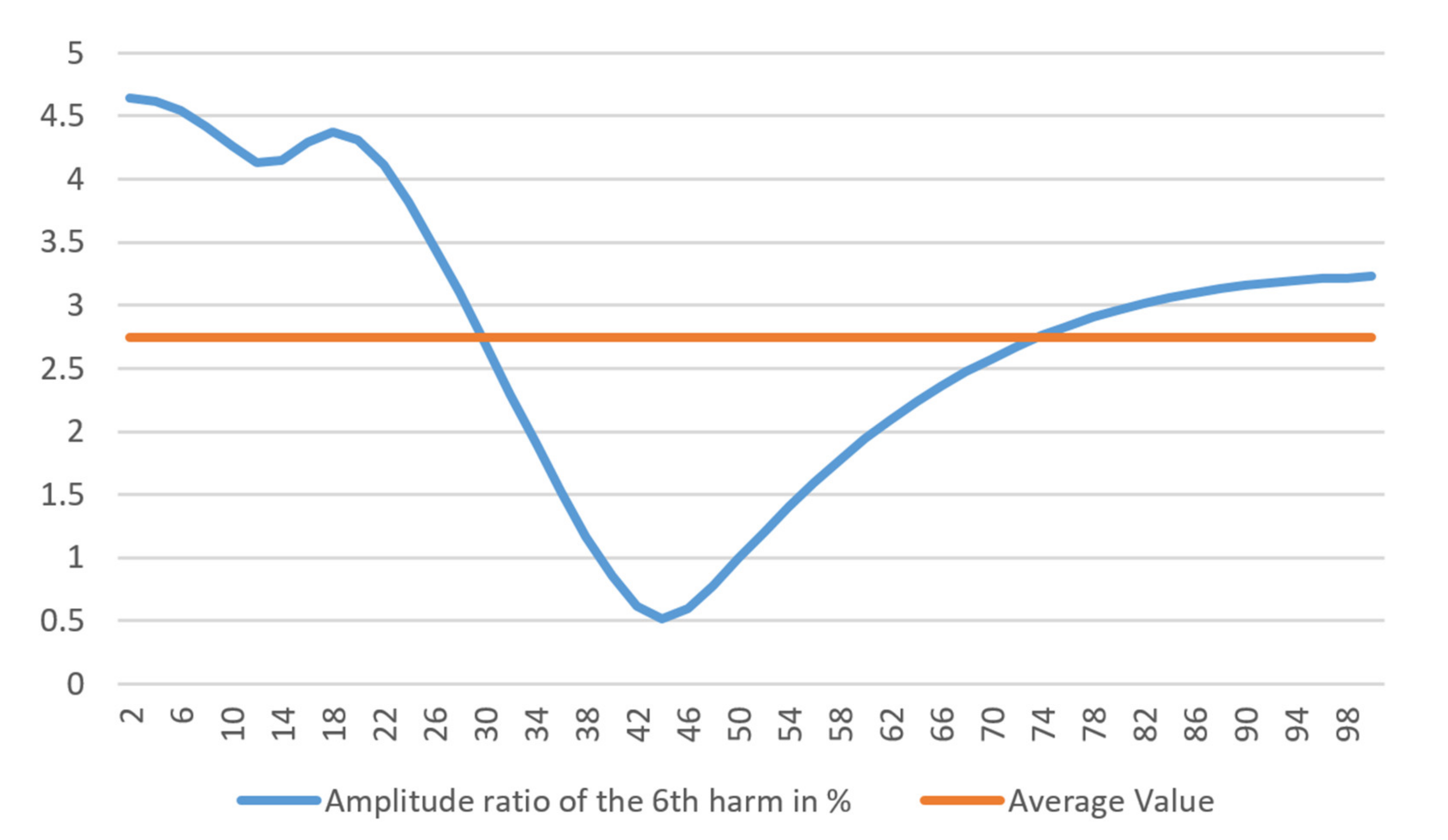
2.1.1. Ratio of Amplitudes and to
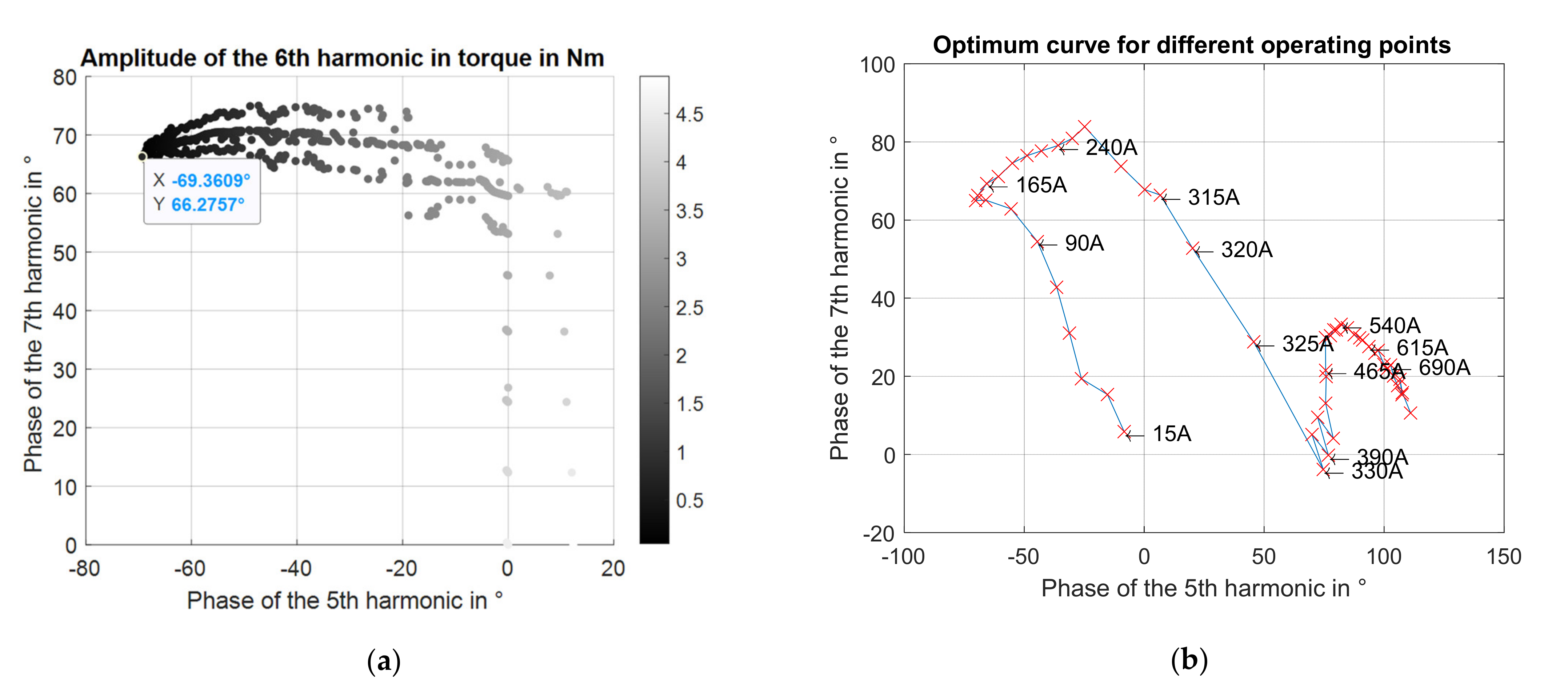
2.1.2. Determination of the Phase Angles and
2.2. Control Structure
2.2.1. Sensor Signal Processing
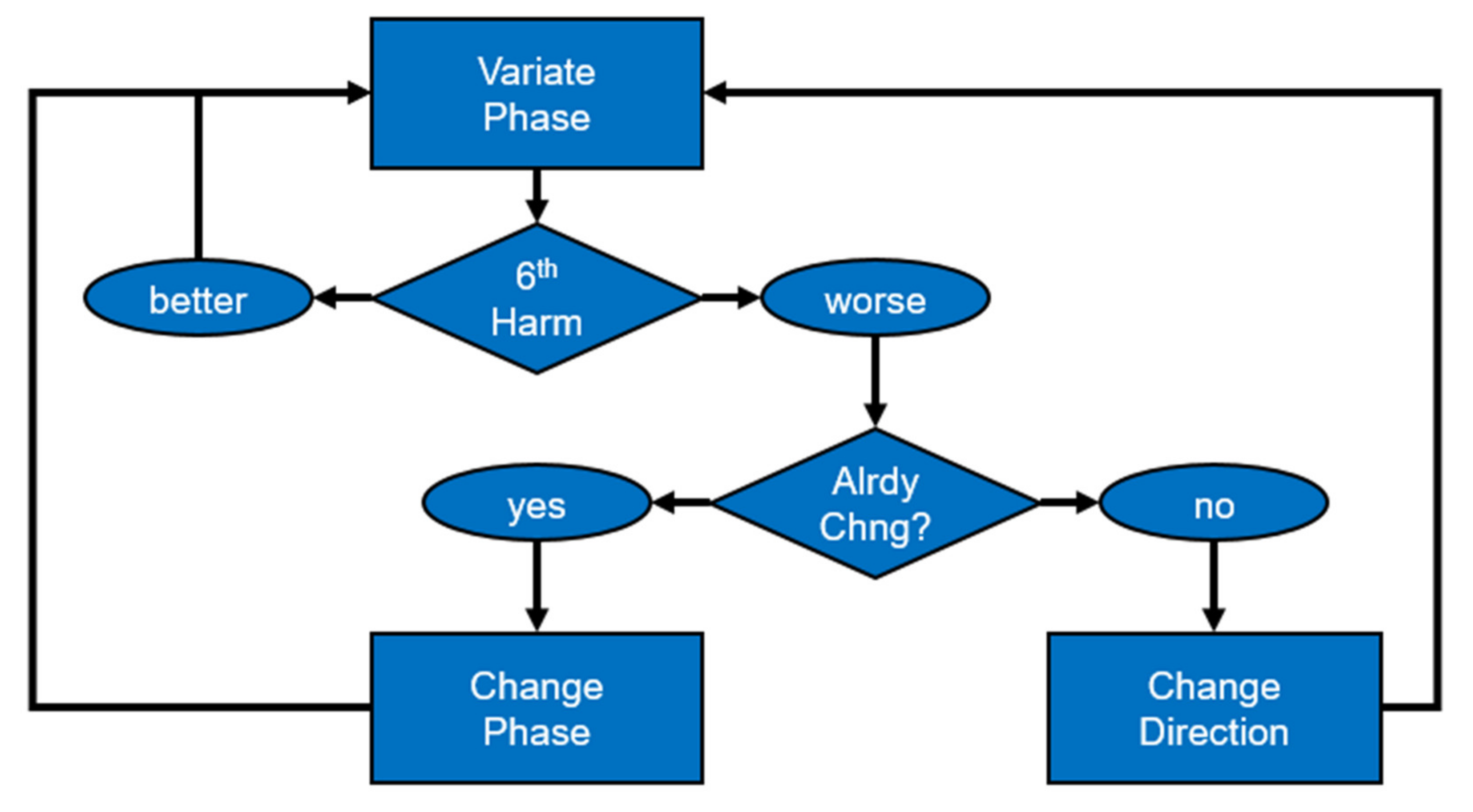
2.2.2. Variation of the Initial Values
2.2.3. Synthesis of the Target Values for the Control
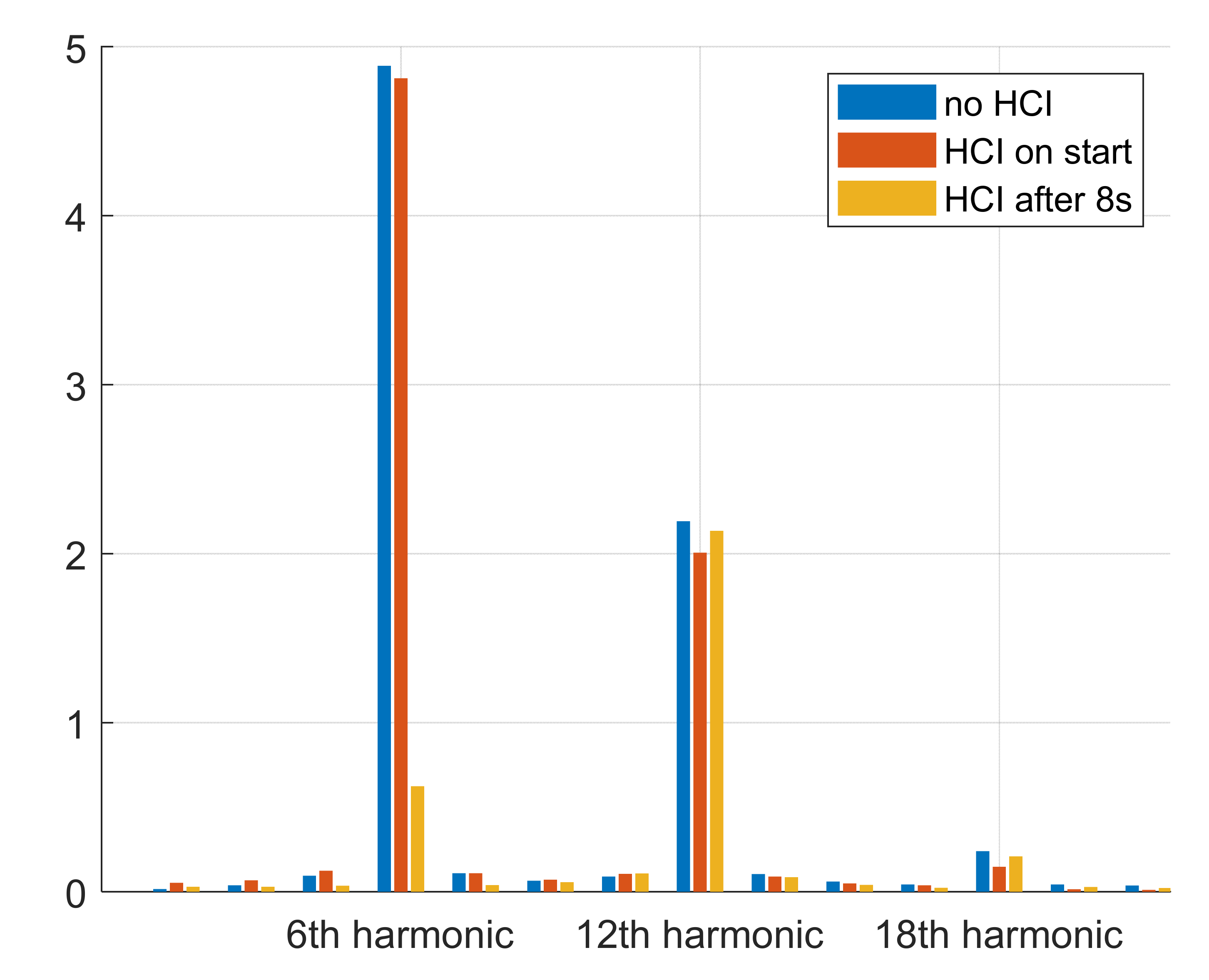
3. Results
- no HCI
- HCI on start of the variation
- HCI after 8 s
4. Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kraftfahrt-Bundesamt—Monatliche Neuzulassungen. Available online: https://www.kba.de/DE/Statistik/Fahrzeuge/Neuzulassungen/MonatlicheNeuzulassungen/monatl_neuzulassungen_node.html (accessed on 13 April 2021).
- Elektroautos—Verkaufszahlen Weltweit 2020 | Statista. Available online: https://de.statista.com/statistik/daten/studie/406683/umfrage/anzahl-der-verkaeufe-von-elektroautos-weltweit-prognose/#statisticContainer (accessed on 13 April 2021).
- Swart, D.J. The Psychoacoustics of Electric Vehicle Signature Sound. Ph.D. Thesis, Faculty of Engineering at Stellenbosch University, Stellenbosch, South-Africa, 2018. [Google Scholar]
- Genuit, K.; Fiebig, A. Sound design of electric vehicles—Challenges and risks. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Melbourne, VIC, Australia, 16–19 November 2014. [Google Scholar]
- Swart, D.J.; Bekker, A.; Bienert, J. The comparison and analysis of standard production electric vehicle drive-train noise. Int. J. Veh. Noise Vib. 2016, 12, 260. [Google Scholar] [CrossRef]
- Petkovska, L.; Cvetkovski, G.; Lefley, P. Analysis of the stator topology impact on cogging torque for surface permanent magnet motor. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2015, 34, 456–474. [Google Scholar] [CrossRef] [Green Version]
- Hwang, M.-H.; Lee, H.-S.; Cha, H.-R. Analysis of Torque Ripple and Cogging Torque Reduction in Electric Vehicle Traction Platform Applying Rotor Notched Design. Energies 2018, 11, 3053. [Google Scholar] [CrossRef] [Green Version]
- Takbash, A.; Ibrahim, M.; Pillay, P. Torque ripple reduction of a variable flux motor. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Huang, S.; Zhang, J.; Gao, J.; Huang, K. Optimization the Electromagnetic Torque Ripple of Permanent Magnet Synchronous Motor. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 3969–3972. [Google Scholar] [CrossRef]
- Azar, Z.; Zhu, Z.Q.; Ombach, G. Influence of Electric Loading and Magnetic Saturation on Cogging Torque, Back-EMF and Torque Ripple of PM Machines. IEEE Trans. Magn. 2012, 48, 2650–2658. [Google Scholar] [CrossRef]
- Chu, W.Q.; Zhu, Z.Q. Reduction of On-Load Torque Ripples in Permanent Magnet Synchronous Machines by Improved Skewing. IEEE Trans. Magn. 2013, 49, 3822–3825. [Google Scholar] [CrossRef]
- Yongchang, Z.; Jianguo, Z.; Wei, X. Predictive torque control of permanent magnet synchronous motor drive with reduced switching frequency. In Proceedings of the 2010 International Conference on Electrical Machines and Systems, Incheon, Korea, 10–13 October 2010. [Google Scholar]
- Kao, W.-T.; Hwang, J.-C.; Liu, J.-E. Development of Three-Phase Permanent-Magnet Synchronous Motor Drive with Strategy to Suppress Harmonic Current. Energies 2021, 14, 1583. [Google Scholar] [CrossRef]
- Liang, Q.; Wei, F.; Li, Z.; Deng, Y.; Wang, Y. Torque Ripple Suppression of Permanent Magnet Synchronous Motor Based On Robust Current Injection. IOP Conf. Ser. Mater. Sci. Eng. 2020, 782, 32082. [Google Scholar] [CrossRef] [Green Version]
- Sumega, M.; Rafajdus, P.; Stulrajter, M. Current Harmonics Controller for Reduction of Acoustic Noise, Vibrations and Torque Ripple Caused by Cogging Torque in PM Motors under FOC Operation. Energies 2020, 13, 2534. [Google Scholar] [CrossRef]
- Yan, L.; Liao, Y.; Lin, H.; Sun, J. Torque ripple suppression of permanent magnet synchronous machines by minimal harmonic current injection. IET Power Electron. 2019, 12, 1368–1375. [Google Scholar] [CrossRef]
- Harries, M.; Hensgens, M.; de Doncker, R.W. Noise Reduction Via Harmonic Current Injection for Concentrated-Winding Permanent Magnet Synchronous Machines. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 1157–1162. [Google Scholar] [CrossRef]
- Zheng, H.; Zhang, J.; Wang, X.; Zhong, Q. Research on Torque Ripple Reduction of Direct-drive Permanent Magnet Wind Power System. In Proceedings of the 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; pp. 5276–5281. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Ma, H. A harmonic current injection method for electromagnetic torque ripple suppression in permanent-magnet synchronous machines. JAE 2017, 53, 327–336. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Kar, N.C. Practical Testing Solutions to Optimal Stator Harmonic Current Design for PMSM Torque Ripple Minimization Using Speed Harmonics. IEEE Trans. Power Electron. 2018, 33, 5181–5191. [Google Scholar] [CrossRef]
- Jędryczka, C.; Danielczyk, D.; Szeląg, W. Torque Ripple Minimization of the Permanent Magnet Synchronous Machine by Modulation of the Phase Currents. Sensors 2020, 20, 2406. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gómez-Espinosa, A.; Hernández-Guzmán, V.M.; Bandala-Sánchez, M.; Jiménez-Hernández, H.; Rivas-Araiza, E.A.; Rodríguez-Reséndiz, J.; Herrera-Ruíz, G. A new adaptive self-tuning Fourier coefficients algorithm for periodic torque ripple minimization in permanent magnet synchronous motors (PMSM). Sensors 2013, 13, 3831–3847. [Google Scholar] [CrossRef] [PubMed]
- Ametani, A. Generalised method of harmonic reduction in a.c.-d.c. convertors by harmonic current injection. Proc. Inst. Electr. Eng. 1972, 119, 857. [Google Scholar] [CrossRef]
- Favre, E.; Cardoletti, L.; Jufer, M. Permanent-magnet synchronous motors: A comprehensive approach to cogging torque suppression. IEEE Trans. Ind. Applicat. 1993, 29, 1141–1149. [Google Scholar] [CrossRef]
- Hwang, J.-C.; Wei, H.-T. The Current Harmonics Elimination Control Strategy for Six-Leg Three-Phase Permanent Magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2014, 29, 3032–3040. [Google Scholar] [CrossRef]
- Yuan, L.; Chen, M.-L.; Shen, J.-Q.; Xiao, F. Current harmonics elimination control method for six-phase PM synchronous motor drives. ISA Trans. 2015, 59, 443–449. [Google Scholar] [CrossRef] [PubMed]
- Jia, H.; Cheng, M.; Hua, W.; Zhao, W.; Li, W. Torque Ripple Suppression in Flux-Switching PM Motor by Harmonic Current Injection Based on Voltage Space-Vector Modulation. IEEE Trans. Magn. 2010, 46, 1527–1530. [Google Scholar] [CrossRef]
- Pham, T.H.; Wendling, P. Current Harmonics Injection Table to Minimize Torque Ripples for Electric Powertrain Interior Permanent Magnet Motor Over Maximum Torque-Speed Curve. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jiang, X.; Zhu, Y.; Hong, J.; Chen, X.; Zhang, Y. Investigation into the loosening mechanism of bolt in curvic coupling subjected to transverse loading. Eng. Fail. Anal. 2013, 32, 360–373. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Sumislawska, M.; Kavanagh, D.F.; Howey, D.A.; McCulloch, M. Dielectric Characteristics of Electric Vehicle Traction Motor Winding Insulation under Thermal Ageing. IEEE Trans. Ind. Applicat. 2015, 1. [Google Scholar] [CrossRef]
- Chou, H.-W.; Huang, J.-S.; Lin, S.-T. Effects of thermal aging on fatigue of carbon black–reinforced EPDM rubber. J. Appl. Polym. Sci. 2007, 103, 1244–1251. [Google Scholar] [CrossRef]
- Veltman, A.; Pulle, D.W.J.; de Doncker, R.W. Fundamentals of Electrical Drives, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Schröder, D. Elektrische Antriebe—Grundlagen, 5th ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Park, R.H. Two Reaction Theory of Synchronous Machines. Generalized Method of Analysis—Part 1. Trans. Am. Inst. Electr. Eng. 1929, 48, 716–727. [Google Scholar] [CrossRef]
- Park, R.H. Two Reaction Theory of Synchronous Machines—Part 2. Trans. Am. Inst. Electr. Eng. 1933, 52, 352–354. [Google Scholar] [CrossRef]
- Tolstov, G.P. Fourier Series; Dover Publications (Dover Books on Mathematics): Newburyport, MA, USA, 2012. [Google Scholar]
- Najmabadi, A.; Xu, W.; Degner, M. A Sensitivity Analysis on the Fifth and the Seventh Harmonic Current Injection for Sixth Order Torque Ripple Reduction. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vollat, M.; Krahe, D.; Gauterin, F. A Novel Method for Harmonic Current Injection with Sensor Supported Adaptation on Permanent Magnet Synchronous Machines. Machines 2021, 9, 139. https://doi.org/10.3390/machines9080139
Vollat M, Krahe D, Gauterin F. A Novel Method for Harmonic Current Injection with Sensor Supported Adaptation on Permanent Magnet Synchronous Machines. Machines. 2021; 9(8):139. https://doi.org/10.3390/machines9080139
Chicago/Turabian StyleVollat, Matthias, Dominik Krahe, and Frank Gauterin. 2021. "A Novel Method for Harmonic Current Injection with Sensor Supported Adaptation on Permanent Magnet Synchronous Machines" Machines 9, no. 8: 139. https://doi.org/10.3390/machines9080139
APA StyleVollat, M., Krahe, D., & Gauterin, F. (2021). A Novel Method for Harmonic Current Injection with Sensor Supported Adaptation on Permanent Magnet Synchronous Machines. Machines, 9(8), 139. https://doi.org/10.3390/machines9080139