

Automatic Kidney Segmentation Method Based on an Enhanced Generative Adversarial Network

Abstract
:1. Introduction
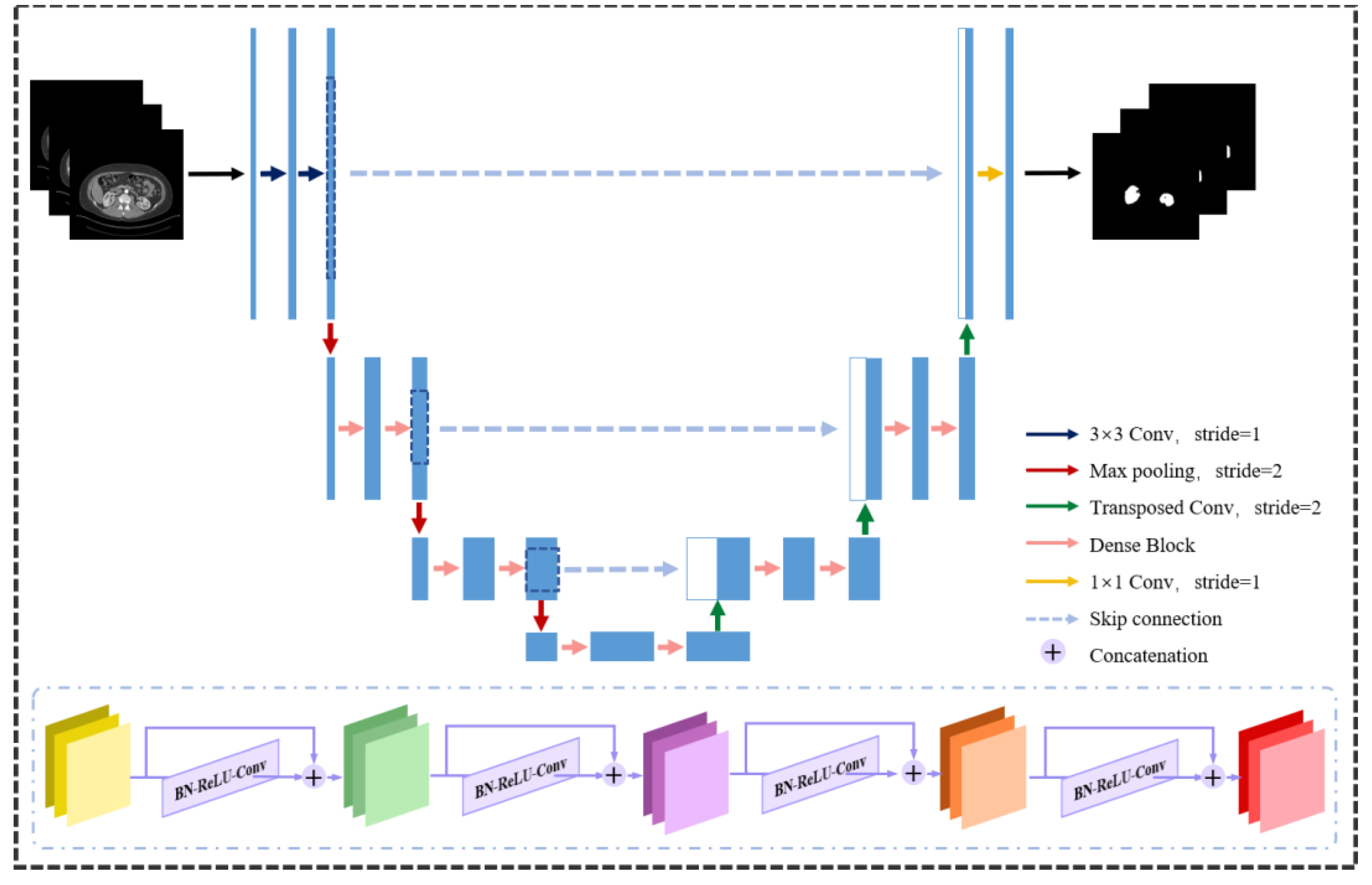
- The network used to generate the segmentation result images in the generator network is an end-to-end complete convolutional network with a U-Net-like topology.
- To make dense connections, we decided to employ densely connected blocks between the posterior layers and all the anterior layers, which ease the gradient vanishing problem, improve feature propagation, and significantly reduce the number of parameters. By connecting the features in the channel dimension, they enable feature reuse.
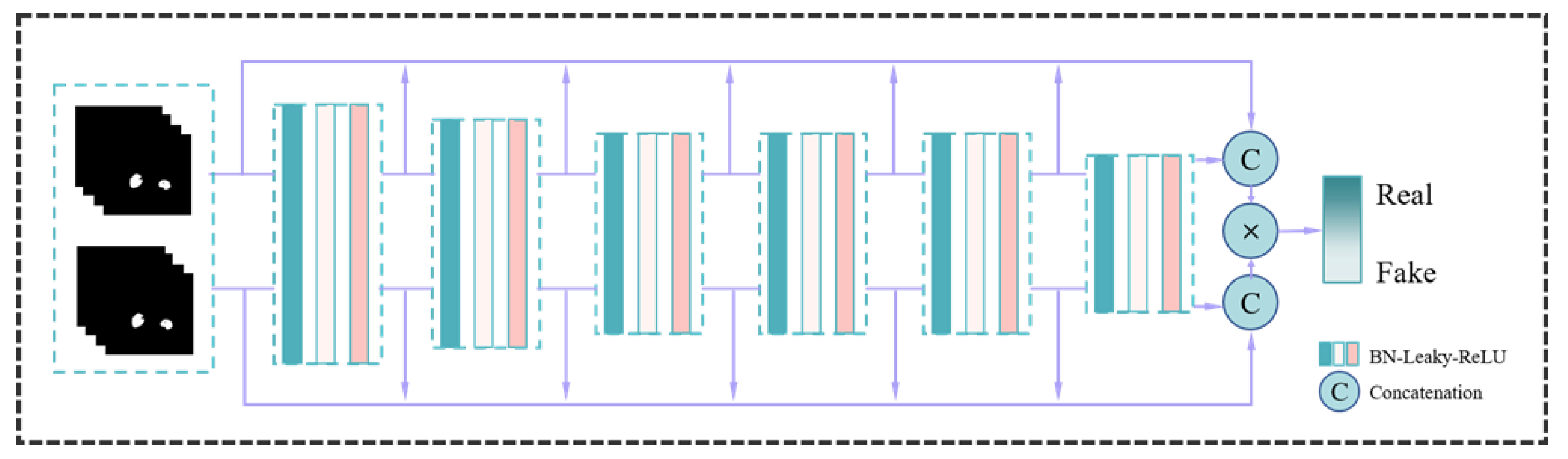
- To avoid model overfitting and more reliably guarantee sparsity, multi-scale feature connections are created in discriminator networks, and the L1 parametric form of the mean absolute error is included as a regular term to the objective function.
2. Materials and Methods
2.1. SegTGAN Architecture
2.1.1. Generator
2.1.2. Discriminator
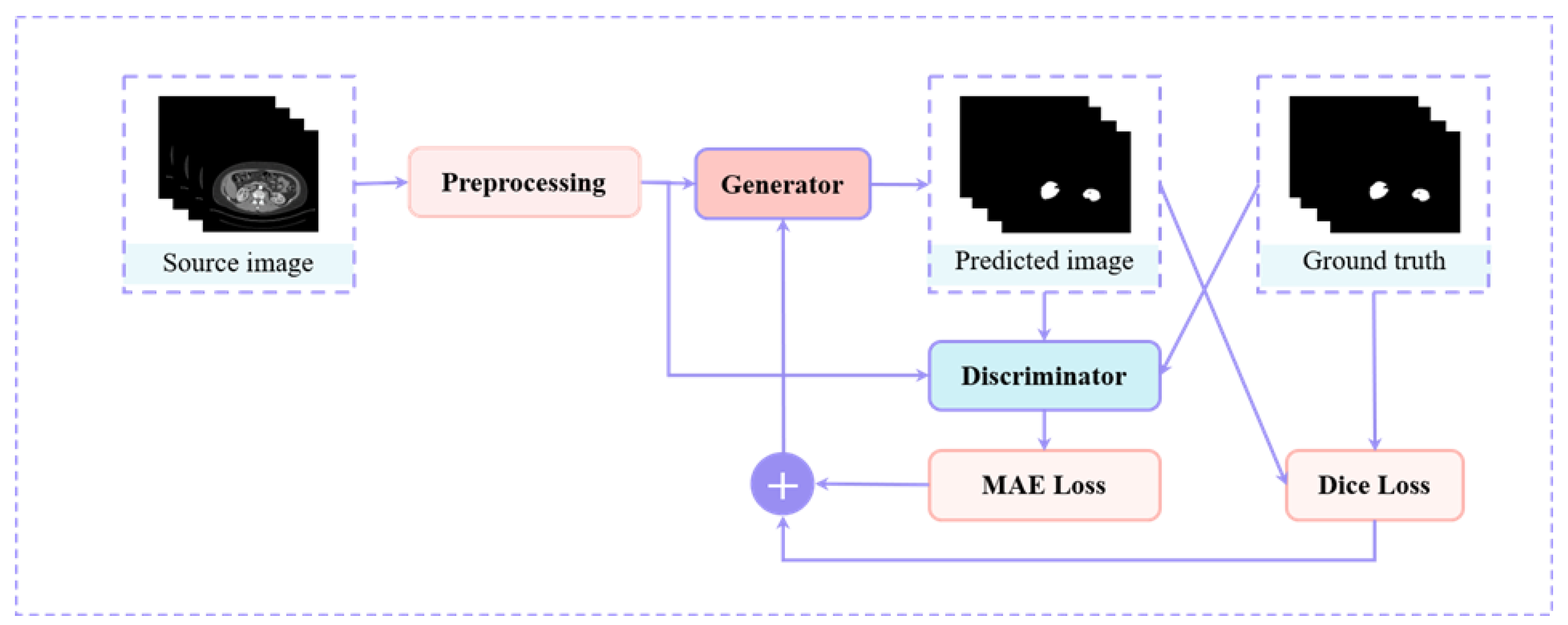
2.1.3. SegTGAN
2.2. Objective Function
2.3. Experimental Configuration and Evaluation Criteria
2.3.1. Data
2.3.2. Implementation
2.3.3. Performance Metrics
3. Results
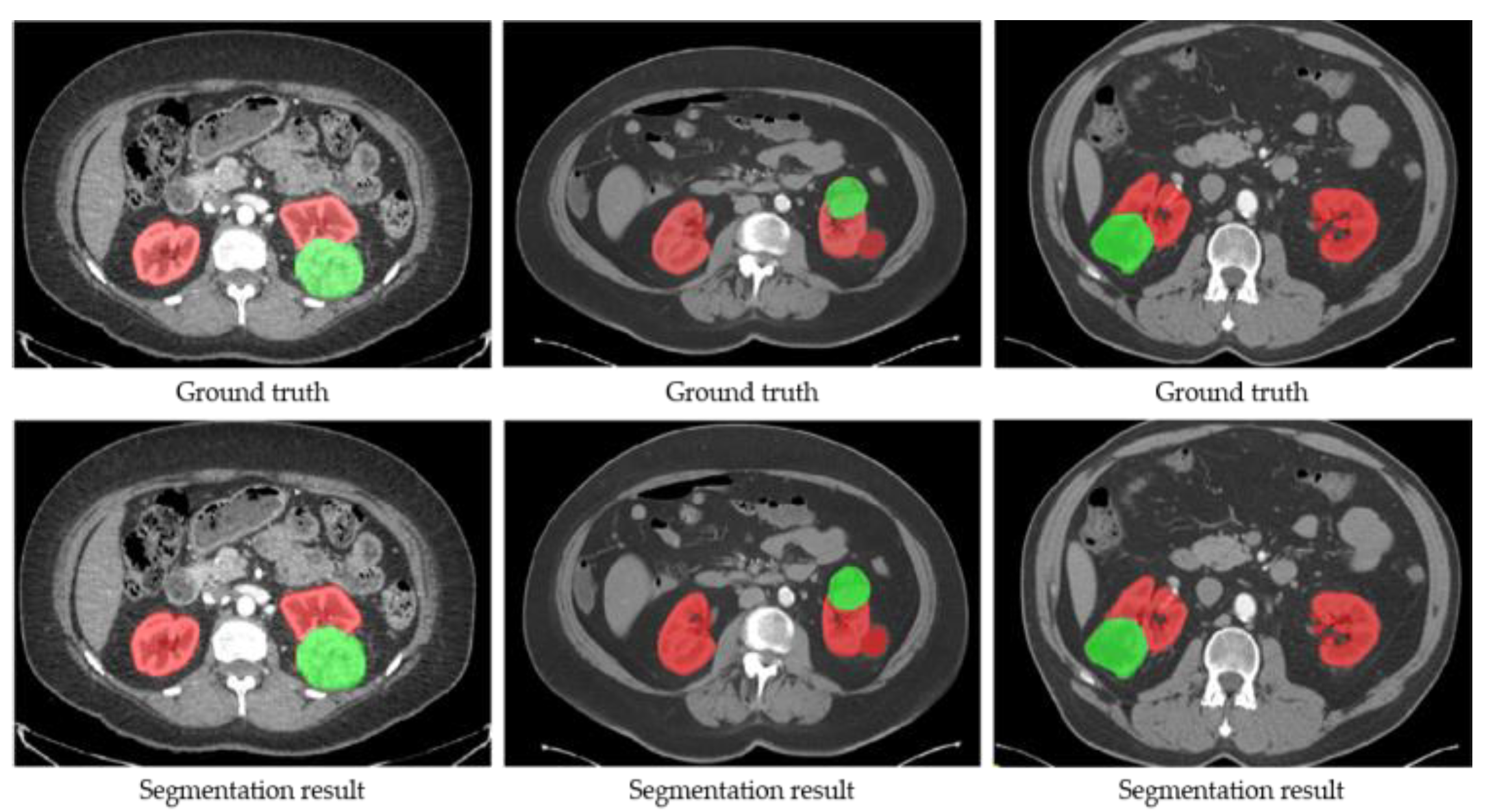
3.1. Qualitative Evaluation
3.2. Quantitative Evaluation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parkin, D.M.; Bray, M.F.; Ferlay, M.J.; Pisani, P. Global cancer statistics, 2002. CA A Cancer J. Clin. 2005, 55, 74–108. [Google Scholar] [CrossRef] [PubMed]
- Bray, F.; Ferlay, J.; Soerjomataram, I.; Siegel, R.L.; Torre, L.A.; Jemal, A. Global cancer statistics 2018: GLOBOCAN estimates of incidence and mortality worldwide for 36 cancers in 185 countries. CA A Cancer J. Clin. 2018, 68, 394–424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Capitanio, U.; Montorsi, F. Renal cancer. Lancet 2016, 387, 894–906. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Wang, B. An automatic kidney segmentation from abdominal CT images. In Proceedings of the IEEE International Conference on Intelligent Computing & Intelligent Systems, Xiamen, China, 29–31 October 2010. [Google Scholar]
- Abirami, M.S.; Sheela, T. Kidney segmentation for finding its abnormalities in abdominal CT images. Int. J. Appl. Eng. Res. 2015, 10, 32025–32034. [Google Scholar]
- Belgherbi, A.; Hadjidj, I.; Bessaid, A. Morphological Segmentation of the Spleen From Abdominal CT Images. J. Mech. Med. Biol. 2014, 14, 1149–1675. [Google Scholar] [CrossRef]
- Khalifa, F.; Soliman, A.; Dwyer, A.C.; Gimel’Farb, G.; El-Baz, A. A random forest-based framework for 3D kidney segmentation from dynamic contrast-enhanced CT images. In Proceedings of the IEEE International Conference on Image Processing, Phoenix, AZ, USA, 25–28 September 2016. [Google Scholar]
- Song, H.; Kang, W.; Zhang, Q.; Wang, S. Kidney segmentation in CT sequences using SKFCM and improved GrowCut algorithm. BMC Syst. Biol. 2015, 9 (Suppl. 5), S5. [Google Scholar] [CrossRef] [Green Version]
- Kaur, R.; Juneja, M.; Mandal, A.K. A hybrid edge-based technique for segmentation of renal lesions in CT images. Multimed. Tools Appl. 2019, 78, 12917–12937. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, H.; Yao, J. A fully automated framework for renal cortex segmentation. MICCAI 2012; International conference on medical image computing and computer-assisted intervention. In Proceedings of the International Workshop on Computational and Clinical Applications in Abdominal Imaging, Cambridge, MA, USA, 14 September 2014. [Google Scholar]
- Kim, H.; Hong, H.; Chang, K.; Rha, K.H. Renal parenchyma segmentation from abdominal CT images using multi-atlas method with intensity and shape constraints. In Proceedings of the Image Processing, San Diego, CA, USA, 19–21 February 2019. [Google Scholar]
- Litjens, G.; Kooi, T.; Bejnordi, B.E.; Setio, A.A.A.; Ciompi, F.; Ghafoorian, M.; van der Laak, J.A.W.M.; van Ginneken, B.; Sánchez, C.I. A survey on deep learning in medical image analysis. Med. Image Anal. 2017, 42, 60–88. [Google Scholar] [CrossRef] [Green Version]
- Xing, F.; Xie, Y.; Yang, L. An Automatic Learning-Based Framework for Robust Nucleus Segmentation. IEEE Trans. Med. Imaging 2016, 35, 550–566. [Google Scholar] [CrossRef]
- Zhu, W.; Huang, Y.; Zeng, L.; Chen, X.; Liu, Y.; Qian, Z.; Du, N.; Fan, W.; Xie, X. AnatomyNet: Deep learning for fast and fully automated whole-volume segmentation of head and neck anatomy. Med. Phys. 2019, 46, 576–589. [Google Scholar] [CrossRef] [Green Version]
- Drozdzal, M.; Chartrand, G.; Vorontsov, E.; Shakeri, M.; Jorio, L.D.; Tang, A.; Romero, A.; Bengio, Y.; Pal, C.; Kadoury, S. Learning Normalized Inputs for Iterative Estimation in Medical Image Segmentation. Med. Image Anal. 2017, 44, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016. [Google Scholar]
- Pedraza, A.; Gallego, J.; Lopez, S.; Gonzalez, L.; Bueno, G. Glomerulus Classification with Convolutional Neural Networks; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Sharma, K.; Rupprecht, C.; Caroli, A.; Aparicio, M.C.; Remuzzi, A.; Baust, M.; Navab, N. Automatic Segmentation of Kidneys using Deep Learning for Total Kidney Volume Quantification in Autosomal Dominant Polycystic Kidney Disease. Sci. Rep. 2017, 7, 2049. [Google Scholar] [CrossRef]
- Sun, C.; Guo, S.; Zhang, H.; Li, J.; Chen, M.; Ma, S.; Jin, L.; Liu, X.; Li, X.; Qian, X. Automatic segmentation of liver tumors from multiphase contrast-enhanced CT images based on FCNs. Artif. Intell. Med. 2017, 83, 58–66. [Google Scholar] [CrossRef] [PubMed]
- Ruan, Y.; Li, D.; Marshall, H.; Miao, T.L.; Li, S. MB-FSGAN: Joint segmentation and quantification of kidney tumor on CT by the multi-branch feature sharing generative adversarial network. Med. Image Anal. 2020, 64, 101721. [Google Scholar]
- Sandfort, V.; Yan, K.; Pickhardt, P.J.; Summers, R.M. Data augmentation using generative adversarial networks (CycleGAN) to improve generalizability in CT segmentation tasks. Sci. Rep. 2019, 9, 16884. [Google Scholar] [CrossRef] [Green Version]
- Conze, P.H.; Kavur, A.E.; Cornec-Le Gall, E.; Gezer, N.S.; Le Meur, Y.; Selver, M.A.; Rousseau, F. Abdominal multi-organ segmentation with cascaded convolutional and adversarial deep networks—ScienceDirect. Artif. Intell. Med. 2021, 117, 102109. [Google Scholar] [CrossRef]
- Wang, W.; Wang, G.; Wu, X.; Ding, X.; Wang, P. Automatic segmentation of prostate magnetic resonance imaging using generative adversarial networks. Clin. Imaging 2021, 70, 1–9. [Google Scholar] [CrossRef]
- Yuan, W.; Wei, J.; Wang, J.; Ma, Q.; Tasdizen, T. Unified Attentional Generative Adversarial Network for Brain Tumor Segmentation from Multimodal Unpaired Images. In Proceedings of the Medical Image Computing and Computer Assisted Intervention–MICCAI 2019: 22nd International Conference, Shenzhen, China, 13–17 October 2019. [Google Scholar]
- Wy, A.; Jia, W.A.; Jw, A.; Qm, A.; Tt, B. Unified generative adversarial networks for multimodal segmentation from unpaired 3D medical images. Med. Image Anal. 2020, 64, 101731. [Google Scholar]
- Yuan, X.; Tao, X.; Han, Z.; Long, R.; Huang, X. SegAN: Adversarial Network with Multi-scale $L_1$ Loss for Medical Image Segmentation. Neuroinformatics 2018, 16, 383–392. [Google Scholar]
- Huang, G.; Liu, Z.; Laurens, V.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Maier, O.; Schröder, C.; Forkert, N.D.; Martinetz, T.; Handels, H. Classifiers for Ischemic Stroke Lesion Segmentation: A Comparison Study. PLoS ONE 2015, 11, e0149828. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Method | Advantage | Disadvantage |
|---|---|---|---|---|
| Yan et al. [4] | 2010 | Connected component labeling algorithm and region growing approach | Leverage morphological features | Long and time consuming |
| Ronneberger et al. [17] | 2015 | U-Net | Multi-scale feature fusion | Prone to underfitting |
| Shelhamer et al. [16] | 2017 | FCN | Enable end-to-end segmentation | Poor detail in segmentation results |
| Pedraza et al. [19] | 2017 | AlexNet | First successful application of Trick such as ReLU, Dropout, and LRN in CNN | Increase in computational volume; redundancy of some feature information |
| Conze et al. [24] | 2021 | GAN | No need to design models that follow any kind of factorization | Non-convergence; collapse problem |
| Model | VOE | ASD | DSC | ACC | SEN | SPE | ||
|---|---|---|---|---|---|---|---|---|
| (mm) | Max | Min | Mean | |||||
| U-Net | 18.74% ± 6.75% | 1.09 ± 0.46 | 93.12% | 54.23% | 89.68% ± 4.30% | 96.88% | 91.46% | 95.29% |
| FCN | 21.01% ± 5.82% | 0.87 ± 0.50 | 91.98% | 48.11% | 87.58% ± 7.54% | 96.93% | 89.85% | 95.46% |
| SegAN | 17.36% ± 2.43% | 0.68 ± 0.20 | 94.72% | 63.16% | 90.14% ± 6.71% | 97.17% | 92.50% | 95.54% |
| SegTGAN | 16.17% ± 2.13% | 0.61 ± 0.17 | 95.26% | 58.30% | 92.28% ± 3.24% | 97.28% | 95.39% | 96.12% |
| Model | VOE | ASD | DSC | ACC | SEN | SPE | ||
|---|---|---|---|---|---|---|---|---|
| (mm) | Max | Min | Mean | |||||
| U-Net | 26.26% ± 0.10% | 1.12 ± 0.62 | 81.61% | 50.30% | 75.22% ± 5.01% | 95.68% | 92.96% | 98.49% |
| FCN | 25.21% ± 0.12% | 1.09 ± 0.65 | 88.37% | 55.12% | 84.18% ± 3.93% | 95.64% | 92.94% | 98.41% |
| SegAN | 23.43% ± 0.10% | 1.07 ± 0.57 | 92.30% | 58.40% | 89.60% ± 4.87% | 96.71% | 92.68% | 98.58% |
| SegTGAN | 22.60%± 0.10% | 1.03±0.52 | 95.07% | 59.02% | 93.01% ± 2.55% | 96.76% | 93.44% | 98.62% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, T.; Ying, Y.; Song, G. Automatic Kidney Segmentation Method Based on an Enhanced Generative Adversarial Network. Diagnostics 2023, 13, 1358. https://doi.org/10.3390/diagnostics13071358
Shan T, Ying Y, Song G. Automatic Kidney Segmentation Method Based on an Enhanced Generative Adversarial Network. Diagnostics. 2023; 13(7):1358. https://doi.org/10.3390/diagnostics13071358
Chicago/Turabian StyleShan, Tian, Yuhan Ying, and Guoli Song. 2023. "Automatic Kidney Segmentation Method Based on an Enhanced Generative Adversarial Network" Diagnostics 13, no. 7: 1358. https://doi.org/10.3390/diagnostics13071358
APA StyleShan, T., Ying, Y., & Song, G. (2023). Automatic Kidney Segmentation Method Based on an Enhanced Generative Adversarial Network. Diagnostics, 13(7), 1358. https://doi.org/10.3390/diagnostics13071358