
A Method for High-Frequency Mechanical Scanning Ultrasonic Flow Imaging with Motion Compensation



Abstract
:1. Introduction
2. Materials and Methods
2.1. System
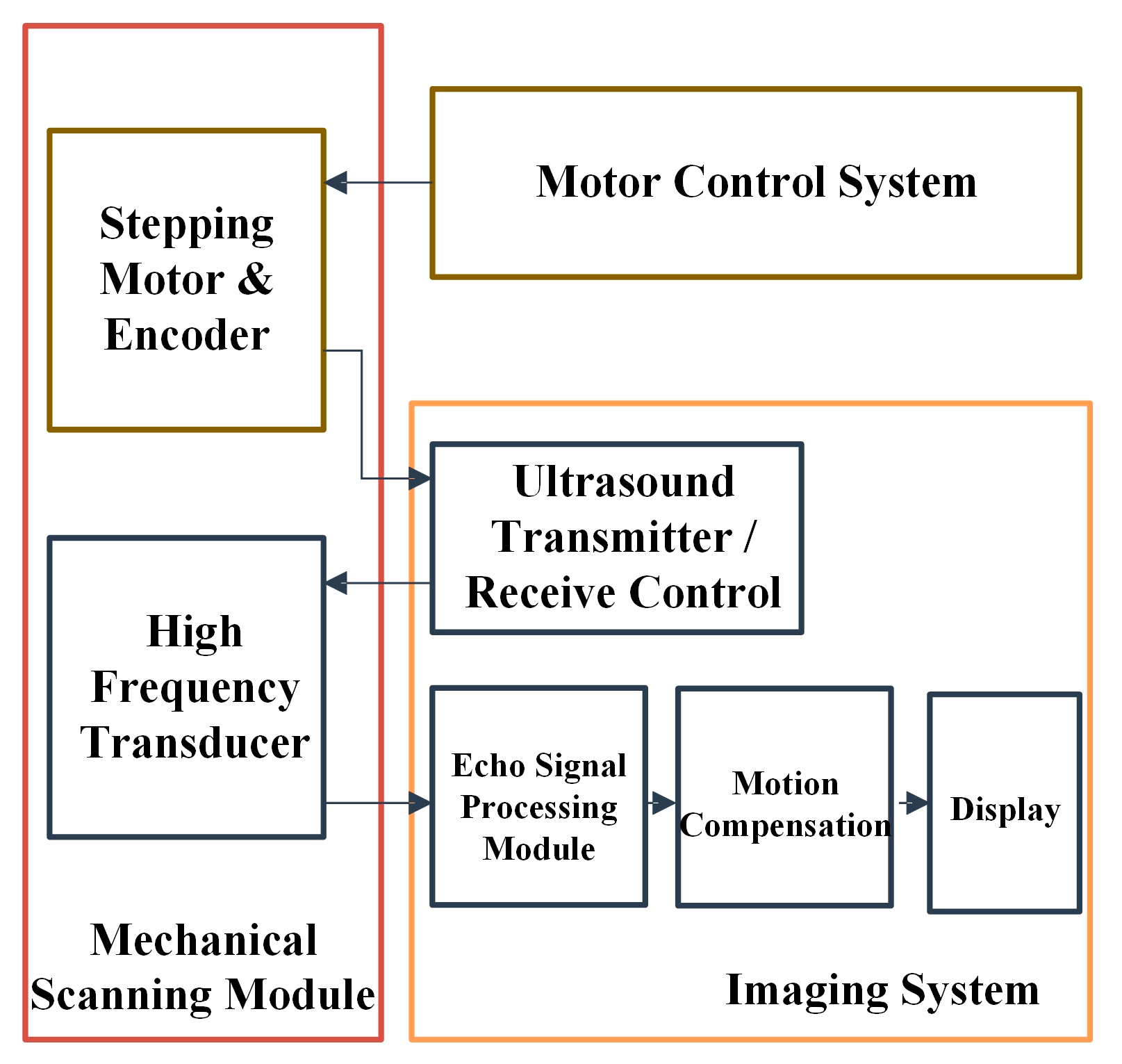
2.1.1. Mechanical Scanning Module
2.1.2. High-Frequency Transducer
2.1.3. Mechanical Scanning Imaging System
2.2. Method
2.2.1. Ultrasound Doppler Flow Imaging Method
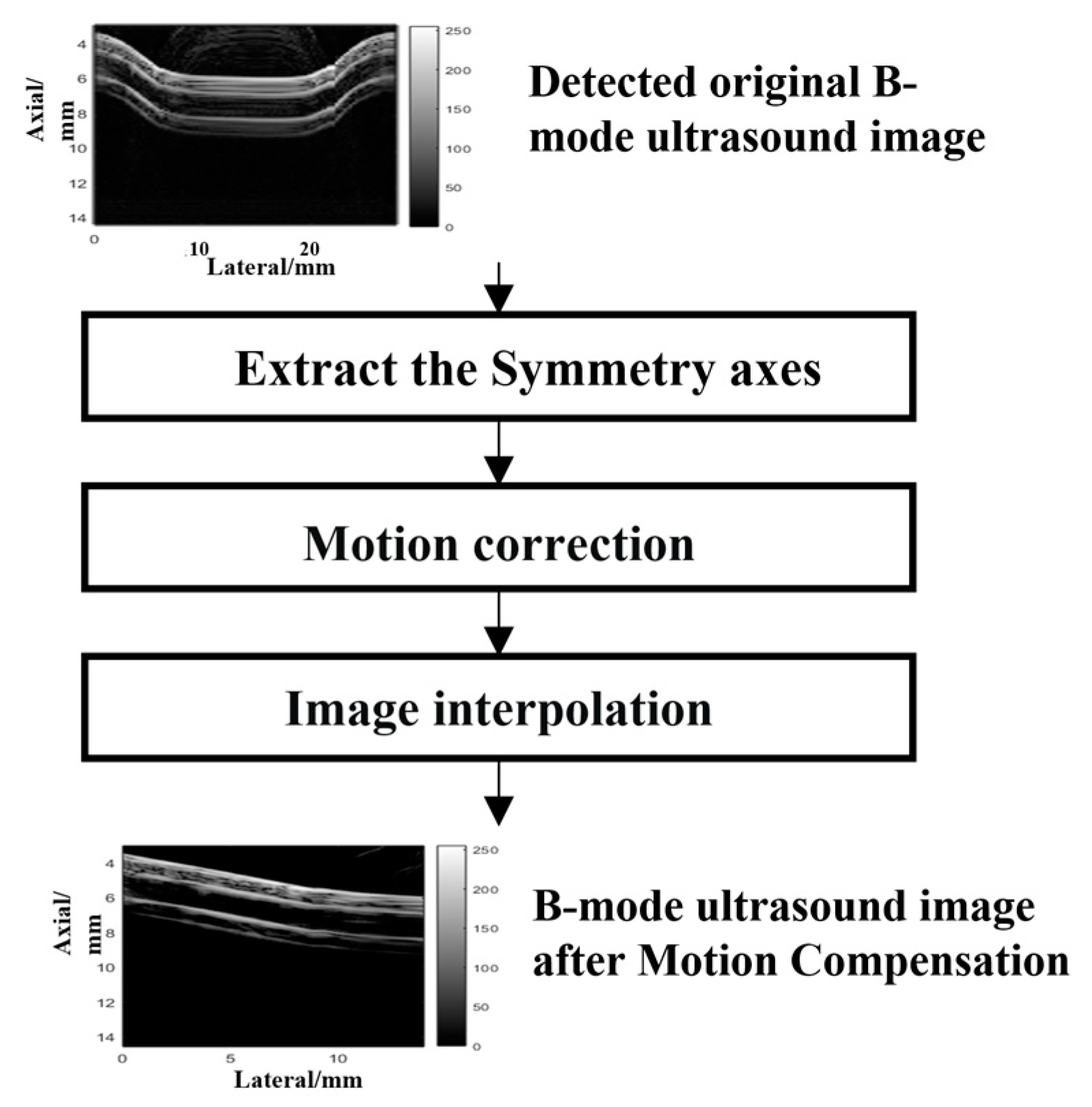
2.2.2. Mechanical Scanning Motion Compensation
2.3. Phantom
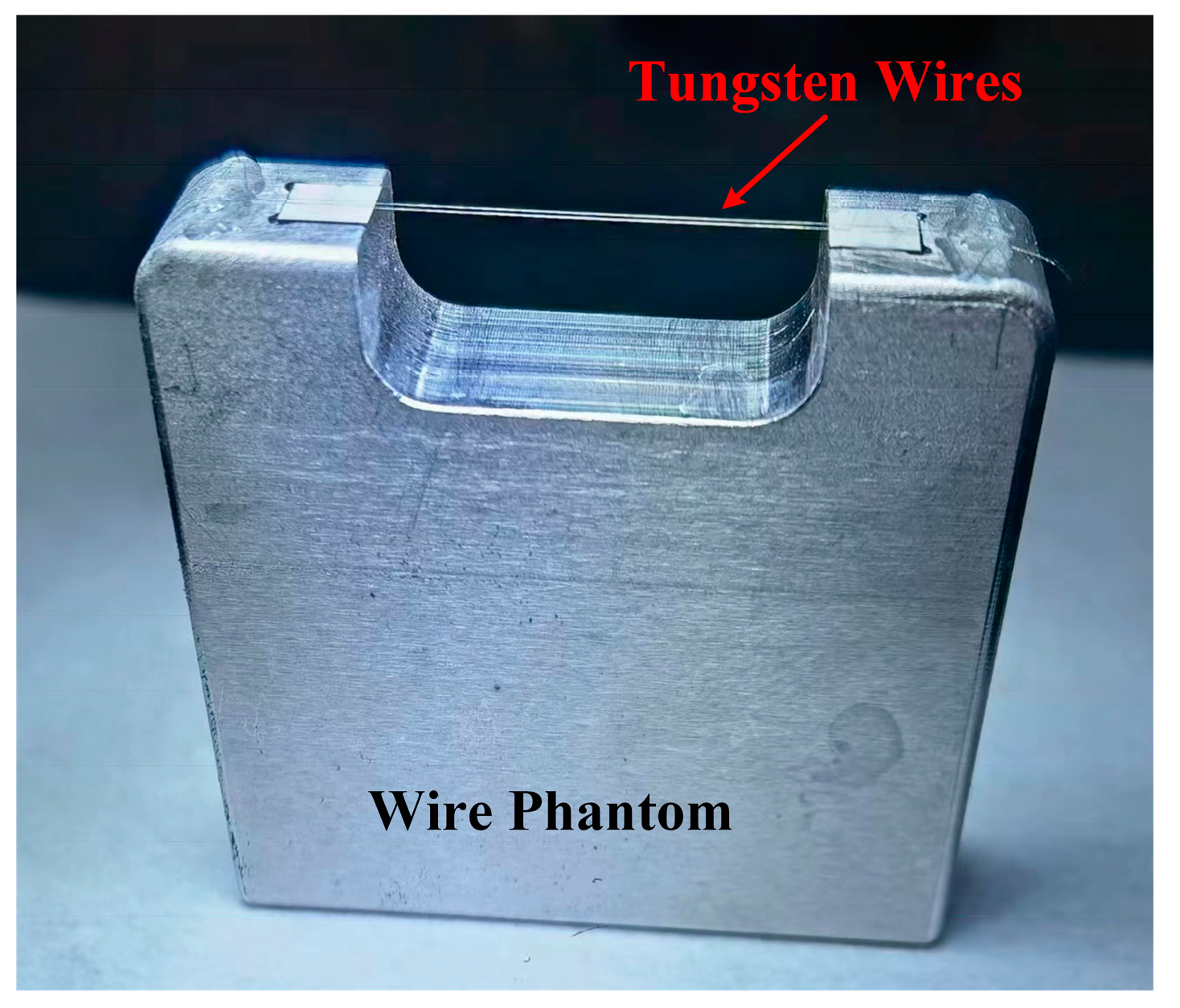
2.3.1. Wire Phantom
2.3.2. Flow Phantom
3. Results
3.1. Wire Phantom Imaging
3.2. Flow Phantom Imaging
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shung, K.K. High Frequency Ultrasonic Imaging. J. Med. Ultrasound 2009, 17, 25–30. [Google Scholar] [CrossRef] [PubMed]
- Levy, J.; Barrett, D.L.; Harris, N.; Jeong, J.J.; Yang, X.; Chen, S.C. High-frequency ultrasound in clinical dermatology: A review. Ultrasound J. 2021, 13, 24. [Google Scholar] [CrossRef] [PubMed]
- Nissen, S.E.; Yock, P. Intravascular ultrasound: Novel pathophysiological insights and current clinical applications. Circulation 2001, 103, 604–616. [Google Scholar] [CrossRef] [PubMed]
- Statie, R.-C.; Florescu, D.N.; Gheonea, D.-I.; Ungureanu, B.S.; Iordache, S.; Rogoveanu, I.; Ciurea, T. The Use of Endoscopic Ultrasonography in Inflammatory Bowel Disease: A Review of the Literature. Diagnostics 2023, 13, 568. [Google Scholar] [CrossRef]
- Lockwood, G.R.; Turnball, D.H.; Christopher, D.A.; Foster, F.S. Beyond 30 MHz [applications of high-frequency ultrasound imaging]. IEEE Eng. Med. Biol. Mag. 1996, 15, 60–71. [Google Scholar] [CrossRef]
- Xu, J.; Wang, N.; Chu, T.; Yang, B.; Jian, X.; Cui, Y. A High-Frequency Mechanical Scanning Ultrasound Imaging System. Biosensors 2022, 13, 32. [Google Scholar] [CrossRef]
- ten Hoff, H.; Gussenhoven, E.J.; Korbijn, A.; Mastik, F.; Lancée, C.T.; Bom, N. Mechanical scanning in intravascular ultrasound imaging: Artifacts and driving mechanisms. Eur. J. Ultrasound 1995, 2, 227–237. [Google Scholar] [CrossRef]
- David, B.R.; Mandi, D.C.; Charles, P.I.; Robin, D.R.; Leonardo, G.M. A Brief Overview of Ophthalmic Ultrasound Imaging. In Novel Diagnostic Methods in Ophthalmology; Anna, N., Ed.; IntechOpen: Rijeka, Croatia, 2019; pp. 67–82. [Google Scholar]
- Choi, S.; Kim, J.Y.; Lim, H.G.; Baik, J.W.; Kim, H.H.; Kim, C. Versatile Single-Element Ultrasound Imaging Platform using a Water-Proofed MEMS Scanner for Animals and Humans. Sci. Rep. 2020, 10, 6544. [Google Scholar] [CrossRef]
- Shah, A.; Irshad, A. Sonography Doppler Flow Imaging Instrumentation. In StatPearls [Internet]; StatPearls Publishing: Tampa, FL, USA, 2022. [Google Scholar]
- Taylor, K.J.; Burns, P.N.; Well, P.N. Clinical Applications of Doppler Ultrasound; U.S. Department of Energy Office of Scientific and Technical Information: Oak Ridge, TN, USA, 1987.
- Grant, E.G.; Benson, C.B.; Moneta, G.L.; Alexandrov, A.V.; Baker, J.D.; Bluth, E.I.; Carroll, B.A.; Eliasziw, M.; Gocke, J.; Hertzberg, B.S. Carotid artery stenosis: Gray-scale and Doppler US diagnosis—Society of Radiologists in Ultrasound Consensus Conference. Radiology 2003, 229, 340–346. [Google Scholar] [CrossRef]
- Aaslid, R. Transcranial Doppler Sonography; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Xu, X.; Sun, L.; Cannata, J.M.; Yen, J.T.; Shung, K.K. High-Frequency Ultrasound Doppler System for Biomedical Applications with a 30-MHz Linear Array. Ultrasound Med. Biol. 2008, 34, 638–646. [Google Scholar] [CrossRef]
- Yeo, S.; Yoon, C.; Lien, C.-L.; Song, T.-K.; Shung, K.K. Monitoring of adult zebrafish heart regeneration using high-frequency ultrasound spectral doppler and Nakagami imaging. Sensors 2019, 19, 4094. [Google Scholar] [CrossRef]
- He, L.; Liu, W.; Wu, D. High Frequency Ultrasound Imaging by Scanning a Single-element Transducer. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019; pp. 2376–2379. [Google Scholar]
- Wang, X.; Zhou, S.; Wang, Y.; Ji, J.; Yang, J. Experimental Study of a Simulated Blood Flow Velocity Measurement System via Very-High-Frequency Ultrasound. In Proceedings of the 2018 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018; pp. 1–6. [Google Scholar]
- Kang, B.J.; Zhou, Q.; Shung, K.K. High-Frequency Ultrasonic Transducers to Uncover Cardiac Dynamics. In Interfacing Bioelectronics and Biomedical Sensing; Cao, H., Coleman, T., Hsiai, T.K., Khademhosseini, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 185–192. [Google Scholar]
- Chen, J.J.; Cheng, C.H.; Yeh, C.K. Skin-scanning technique for superficial blood flow imaging using a high-frequency ultrasound system. Ultrasonics 2014, 54, 241–246. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Han, Z.; Wang, N.; Li, Z.; Lv, J.; Zhu, X.; Cui, Y.; Jian, X. Micromachined High Frequency 1–3 Piezocomposite Transducer Using Picosecond Laser. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 2219–2226. [Google Scholar] [CrossRef] [PubMed]
- Jian, X.; Liu, P.; Li, Z.; Lv, J.; Yang, C.; Li, P.; Cui, Y. Development of Self-Focusing Piezoelectric Composite Ultrasound Transducer Using Laser Engraving Technology. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 66, 1866–1873. [Google Scholar] [CrossRef]
- Yu, A.C.; Cobbold, R.S. Single-ensemble-based eigen-processing methods for color flow imaging-Part I. The Hankel-SVD filter. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 559–572. [Google Scholar] [CrossRef] [PubMed]
- Lo, Y.L.; Yang, C.H. A Color Doppler Processing Engine with an Adaptive Clutter Filter for Portable Ultrasound Imaging Devices. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Virtual Conference, 6–11 June 2021; pp. 7893–7897. [Google Scholar]
- Kasai, C.; Namekawa, K.; Koyano, A.; Omoto, R. Real-Time Two-Dimensional Blood Flow Imaging Using an Autocorrelation Technique. IEEE Trans. Sonics Ultrason. 1985, 32, 458–464. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, X.; Ying, z.; Peng, M. Color Doppler ultrasound findings of forearm arteries in normal adults. Appl. J. Gen. Pract. 2008, 6, 2. [Google Scholar]
- Foster, F.S.; Zhang, M.Y.; Zhou, Y.Q.; Liu, G.; Mehi, J.; Cherin, E.; Harasiewicz, K.A.; Starkoski, B.G.; Zan, L.; Knapik, D.A.; et al. A new ultrasound instrument for in vivo microimaging of mice. Ultrasound. Med. Biol. 2002, 28, 1165–1172. [Google Scholar] [CrossRef]
- Meilan, P.; Garavaglia, M. Rayleigh Resolution Criterion for Light Sources of Different Spectral Composition. Braz. J. Phys. 1997, 27, 638–643. [Google Scholar] [CrossRef]
- Sui, Y.; Yan, S.; Yu, J.; Song, J.; Ta, D.; Wang, W.; Xu, K. Randomized Spatial Downsampling-Based Cauchy-RPCA Clutter Filtering for High-Resolution Ultrafast Ultrasound Microvasculature Imaging and Functional Imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 2425–2436. [Google Scholar] [CrossRef]
- Taylor, J. Introduction to error Analysis, the Study of Uncertainties in Physical Measurements, 2nd ed.; University Science Books: Dulles, VA, USA, 1997. [Google Scholar]
- JCGM GUM-6: 2020. Guide to the Expression of Uncertainty in Measurement—Part 6: Developing and Using Measurement Models; Joint Committee for Guides in Metrology; Bureau International de Métrologie Légale: Paris, France, 2020. [Google Scholar]
- Nasoni, R.L. Temperature corrected speed of sound for use in soft tissue imaging. Med. Phys. 1981, 8, 513–515. [Google Scholar] [CrossRef] [PubMed]
- Ortega, R.; Téllez, A.; Leija, L.; Vera, A. Measurement of ultrasonic properties of muscle and blood biological phantoms. Phys. Procedia 2010, 3, 627–634. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Flow Rate (cm/s) | Pulse Repetition Frequency (Hz) | Experimental Diaphragm Pump Model |
|---|---|---|---|
| 1 | 25.2 | 2500 | KVP04-1 |
| 2 | 38.6 | 4000 | EDVP08 |
| 3 | 44.0 | 3000 | KLC2-A-1 |
| 4 | 58.9 | 4000 | KVP04-2 |
| 5 | 67.7 | 4000 | KLC2-A-2 |
| Group | Actual Flow Rate (cm/s) | Before Compensation | After Compensation | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Flow Rate (cm/s) | Relative Error (%) | Standard Uncertainty (cm/s) | CNR (dB) | Flow Rate (cm/s) | Relative Error (%) | Standard Uncertainty (cm/s) | CNR (dB) | ||
| 1 | 25.2 | 26.4 ± 0.3 | 5.03 | 0.3 | 15.02 | 26.4 ± 0.3 | 4.98 | 0.3 | 15.03 |
| 2 | 38.6 | 36.8 ± 0.4 | 4.75 | 0.4 | 20.46 | 36.9 ± 0.4 | 4.73 | 0.4 | 20.47 |
| 3 | 44.0 | 42.2 ± 0.5 | 4.12 | 0.5 | 16.33 | 42.2 ± 0.4 | 4.04 | 0.4 | 16.37 |
| 4 | 58.9 | 56.7 ± 0.7 | 3.81 | 0.7 | 16.31 | 56.7 ± 0.6 | 3.65 | 0.6 | 16.89 |
| 5 | 67.7 | 65.4 ± 0.8 | 3.38 | 0.8 | 18.41 | 65.5 ± 0.7 | 3.33 | 0.7 | 18.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heng, J.; Li, C.; Chu, T.; Xu, Y.; Jian, X. A Method for High-Frequency Mechanical Scanning Ultrasonic Flow Imaging with Motion Compensation. Diagnostics 2023, 13, 1467. https://doi.org/10.3390/diagnostics13081467
Heng J, Li C, Chu T, Xu Y, Jian X. A Method for High-Frequency Mechanical Scanning Ultrasonic Flow Imaging with Motion Compensation. Diagnostics. 2023; 13(8):1467. https://doi.org/10.3390/diagnostics13081467
Chicago/Turabian StyleHeng, Jiaming, Chenxi Li, Tianxiang Chu, Yiwen Xu, and Xiaohua Jian. 2023. "A Method for High-Frequency Mechanical Scanning Ultrasonic Flow Imaging with Motion Compensation" Diagnostics 13, no. 8: 1467. https://doi.org/10.3390/diagnostics13081467
APA StyleHeng, J., Li, C., Chu, T., Xu, Y., & Jian, X. (2023). A Method for High-Frequency Mechanical Scanning Ultrasonic Flow Imaging with Motion Compensation. Diagnostics, 13(8), 1467. https://doi.org/10.3390/diagnostics13081467