Understanding the Influences of Multiscale Waviness on the Elastohydrodynamic Lubrication Performance, Part I: The Full-Film Condition




Abstract
:1. Introduction
2. Materials and Methods
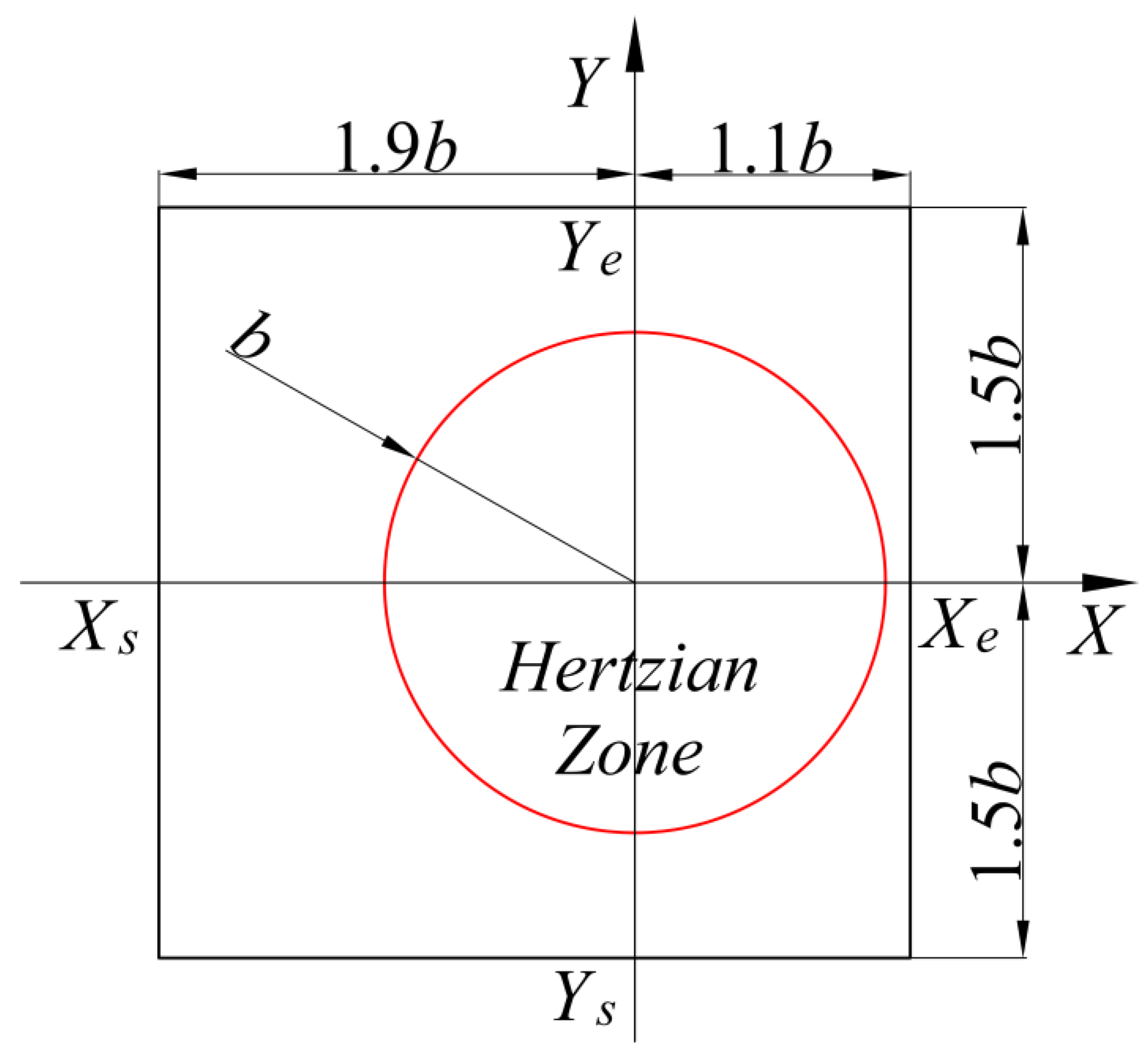
2.1. Computation Model
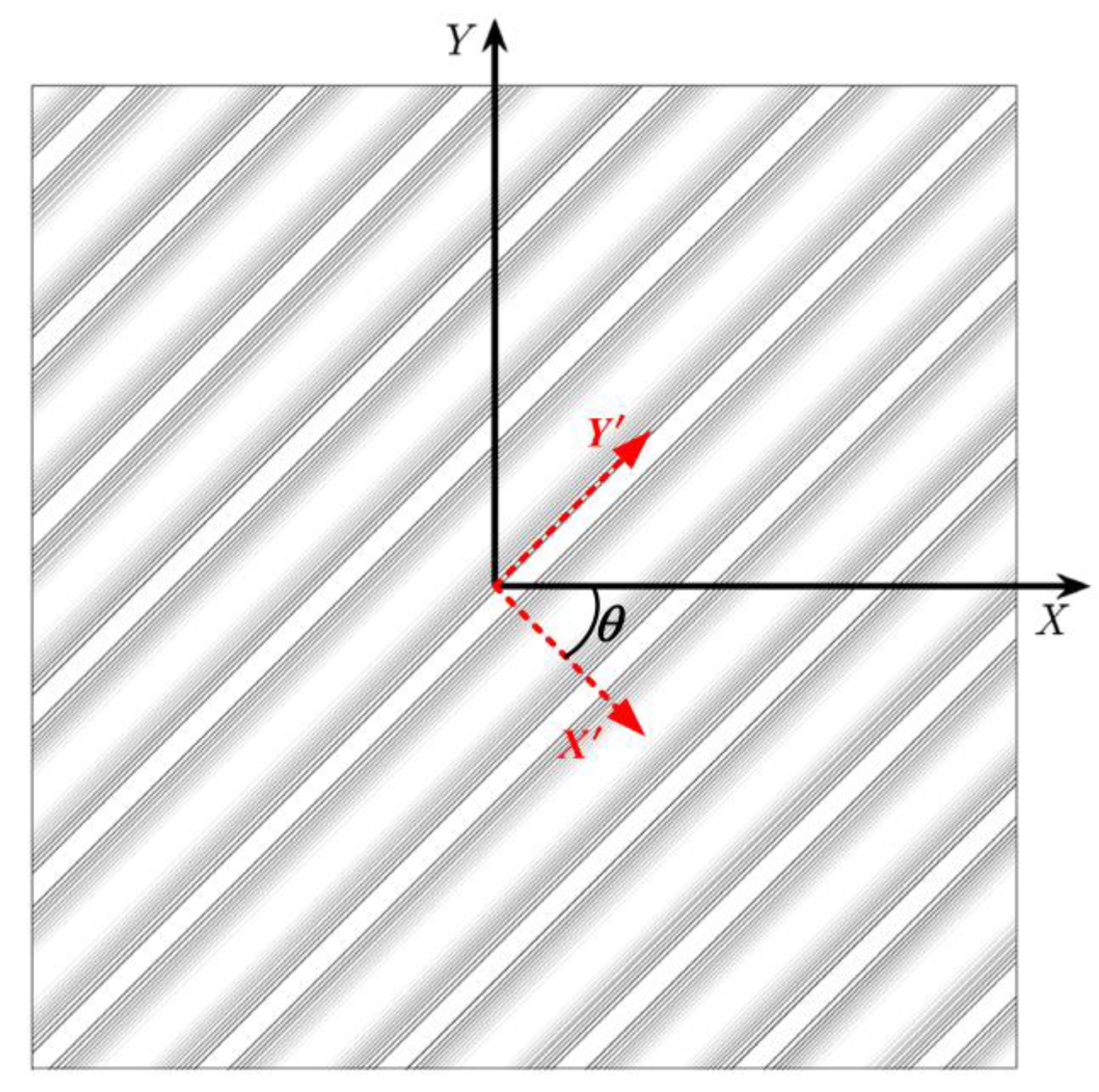
2.2. Wavy Surface Generation
2.3. Numerical Simulation Details
3. Results and Discussion
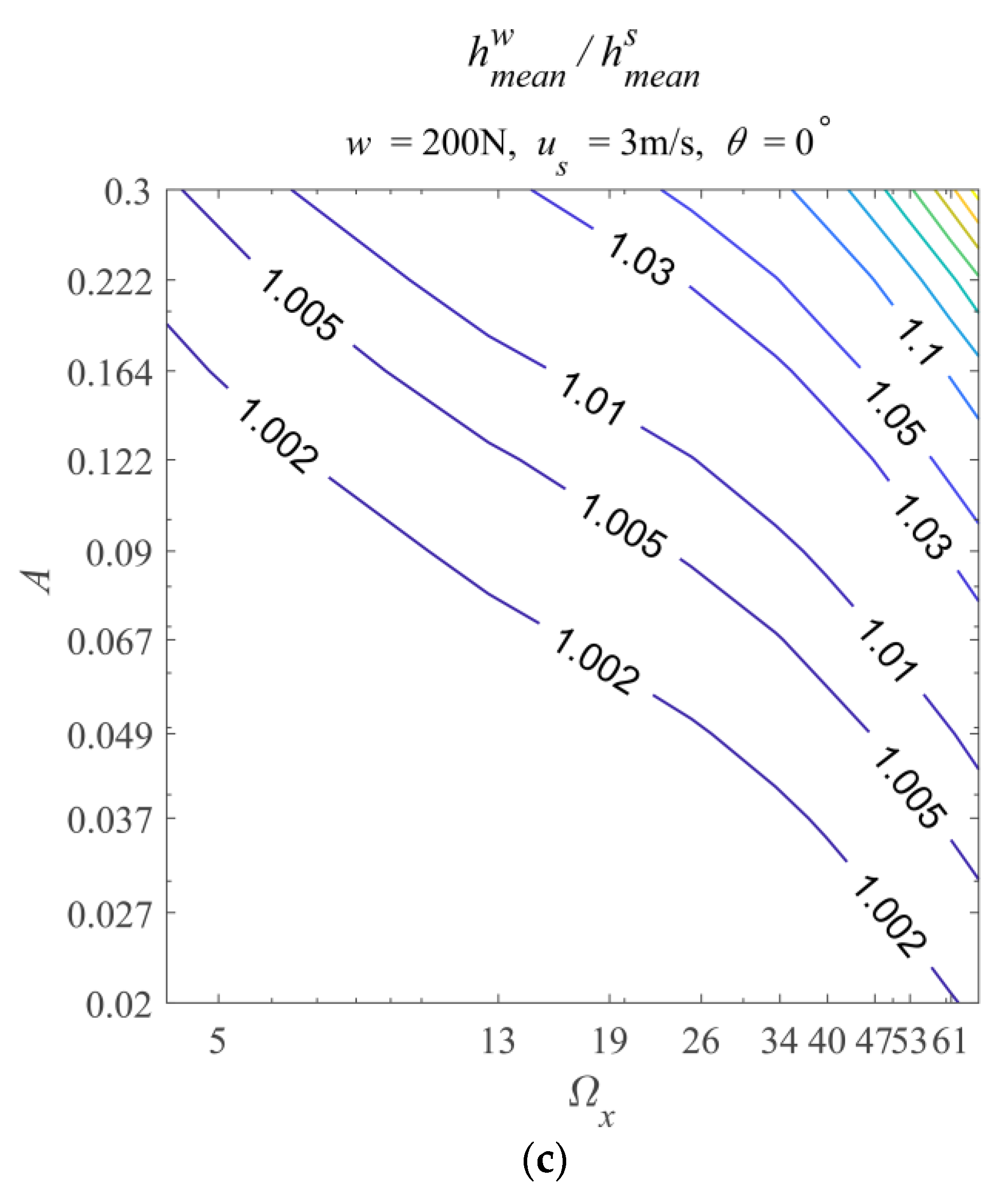
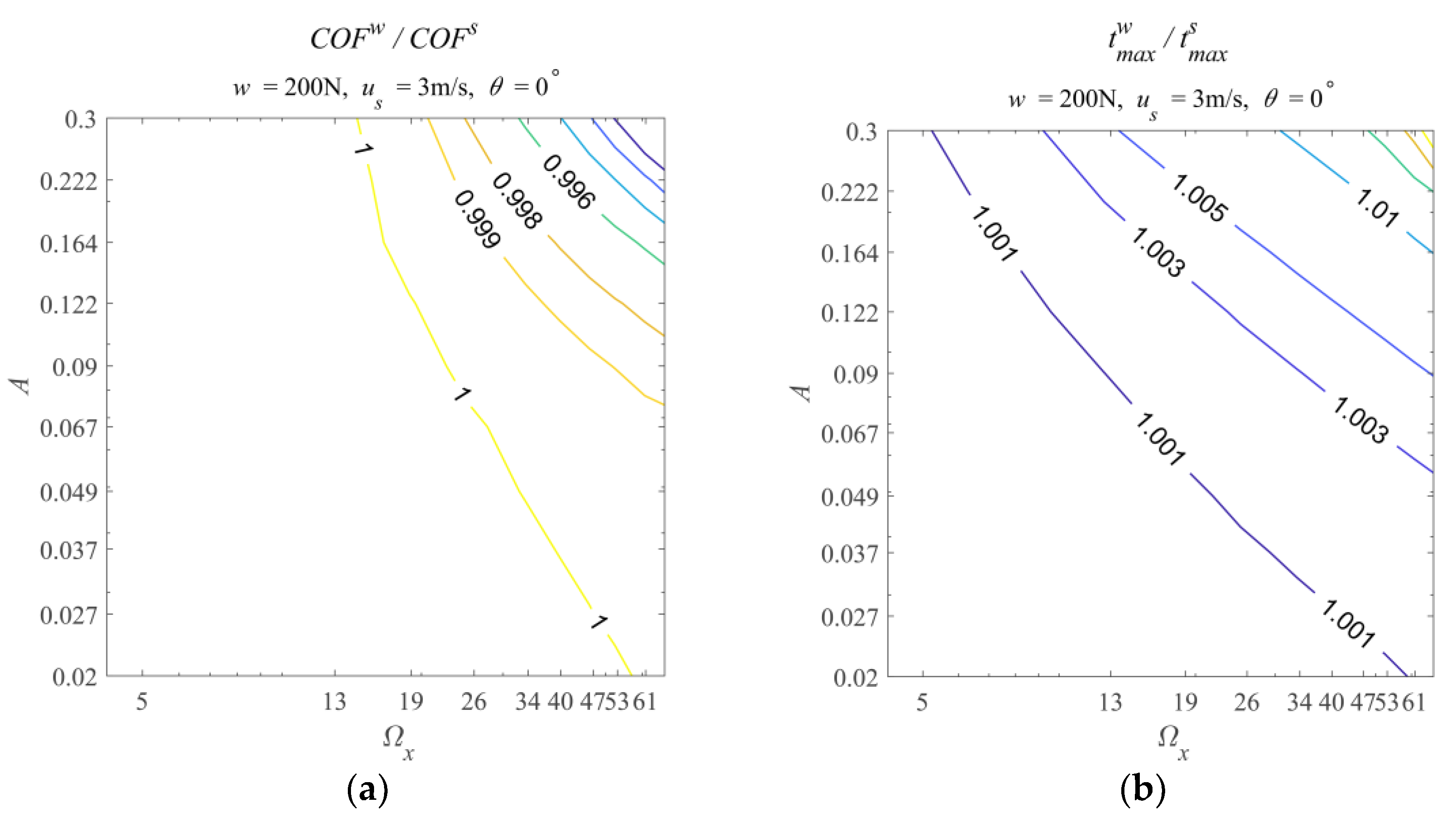
3.1. The Influences of the Waviness Amplitude and Frequency
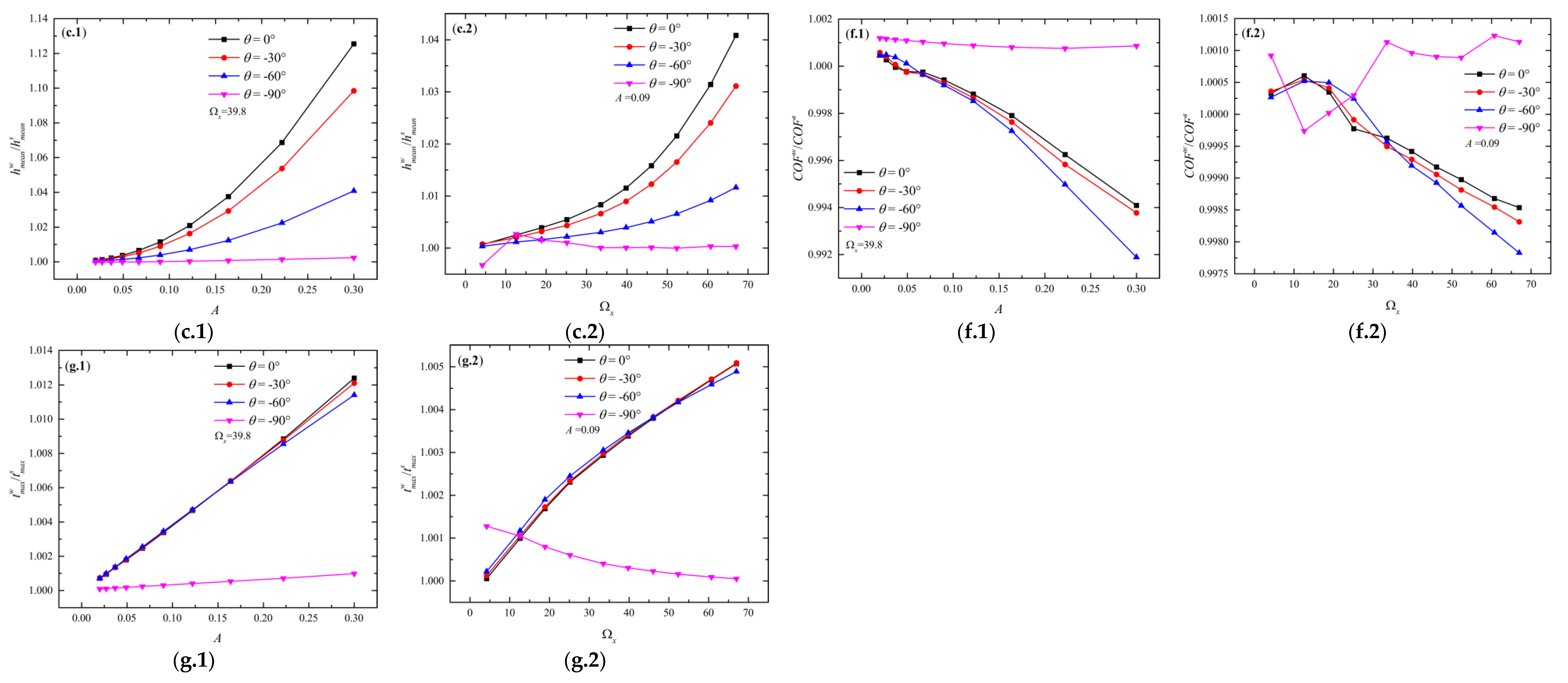
3.2. The Influence of the Wave Direction
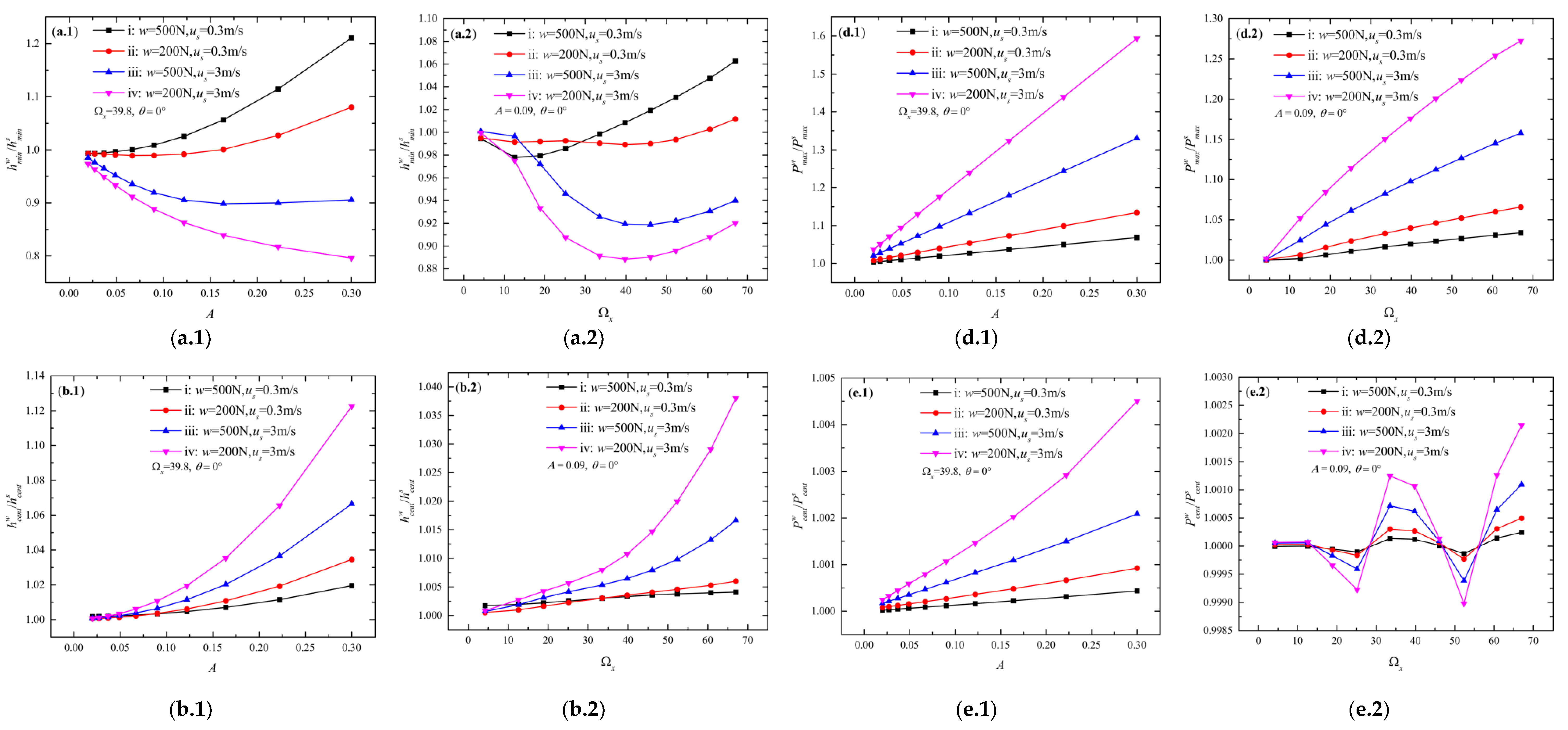
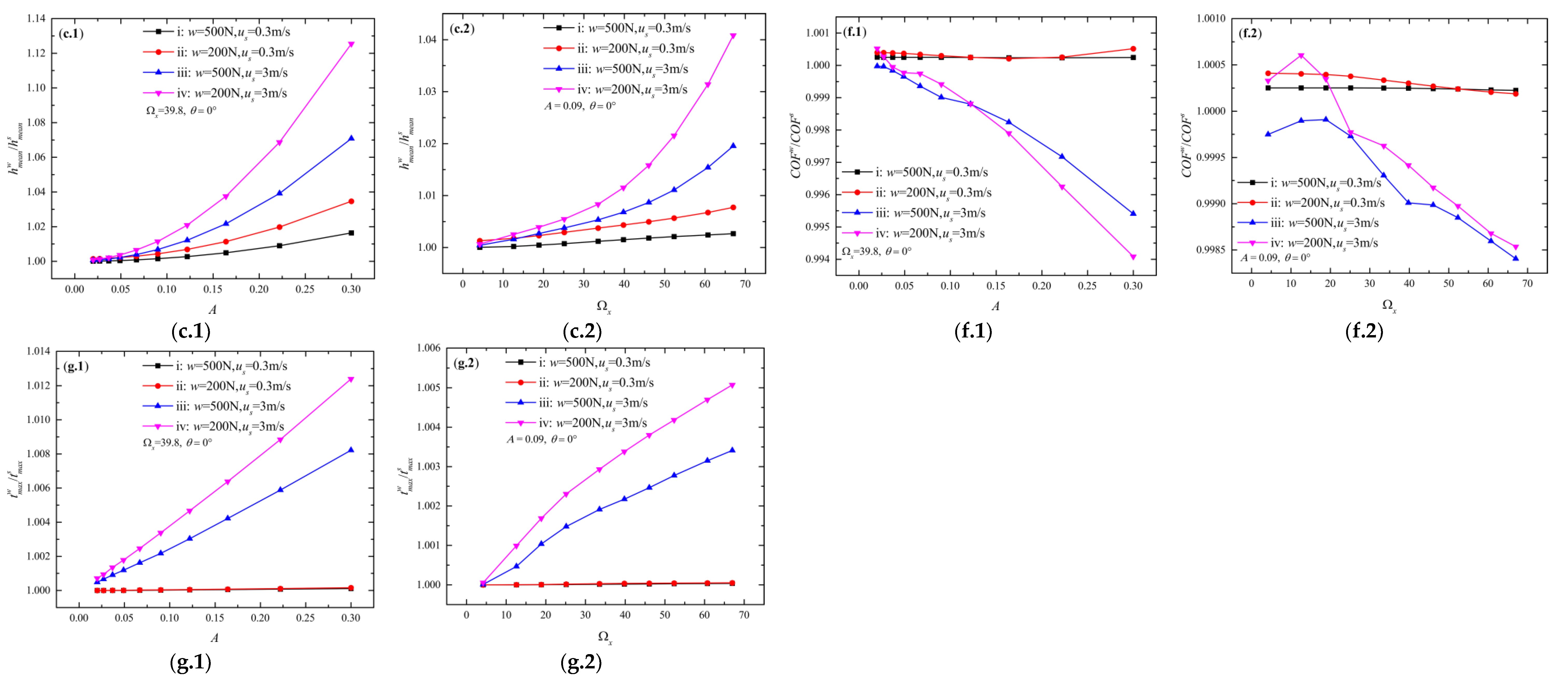
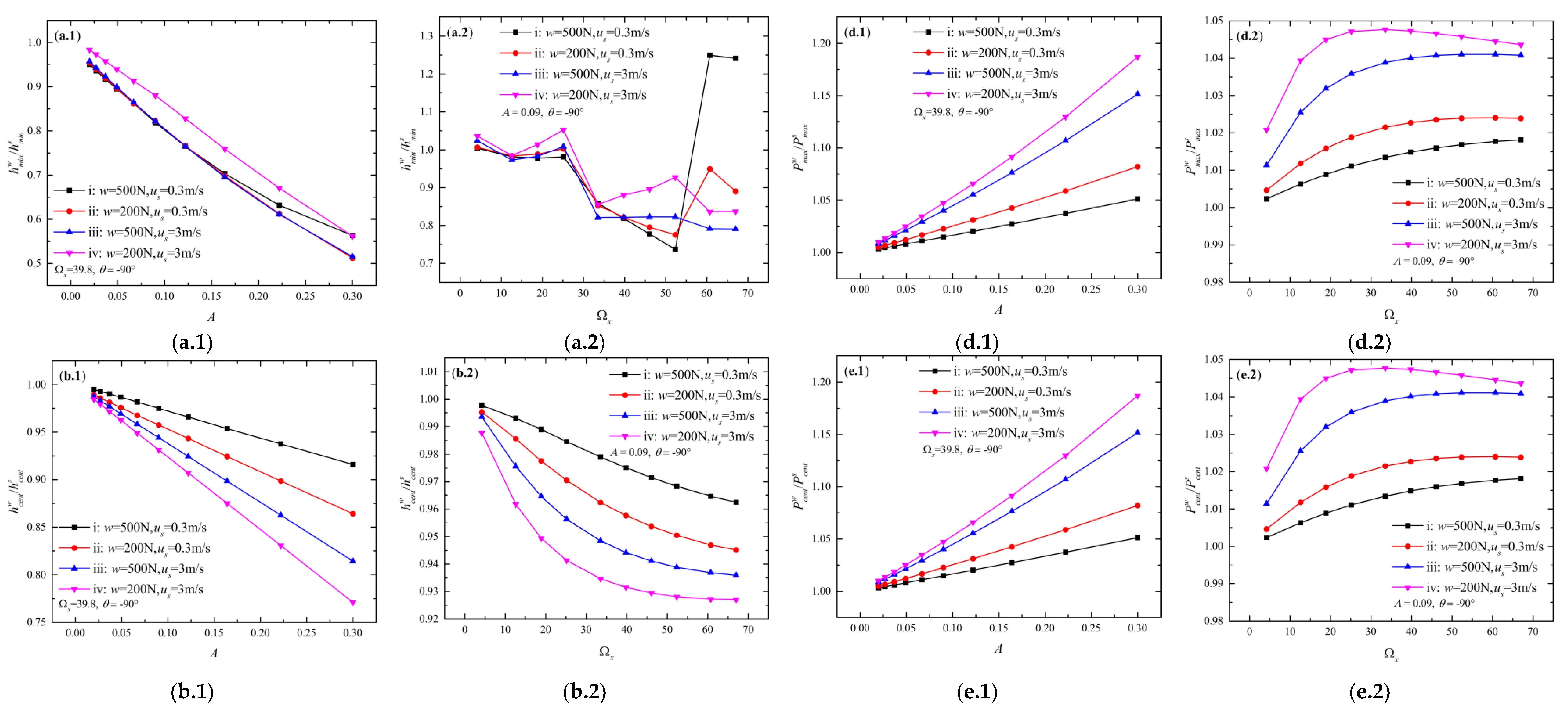
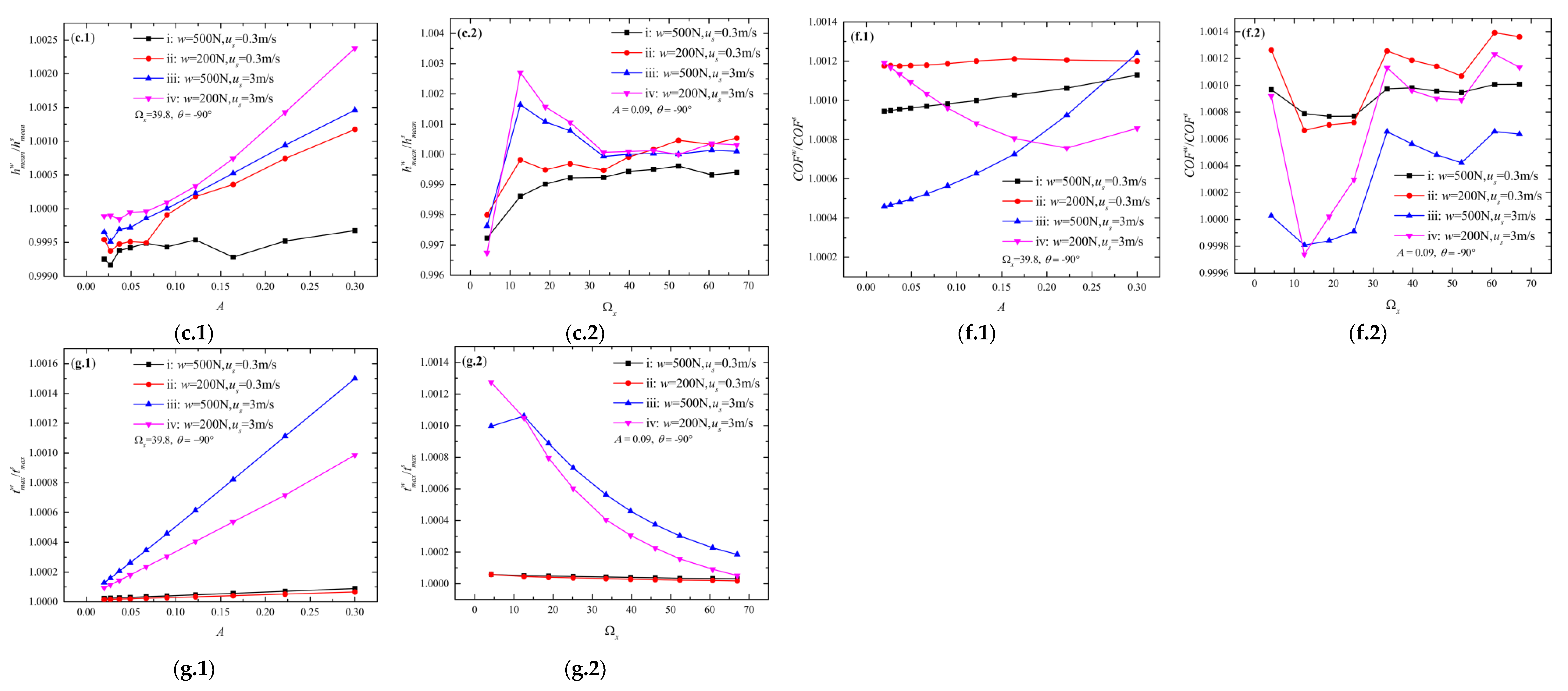
3.3. The Influences of the Load and Speed
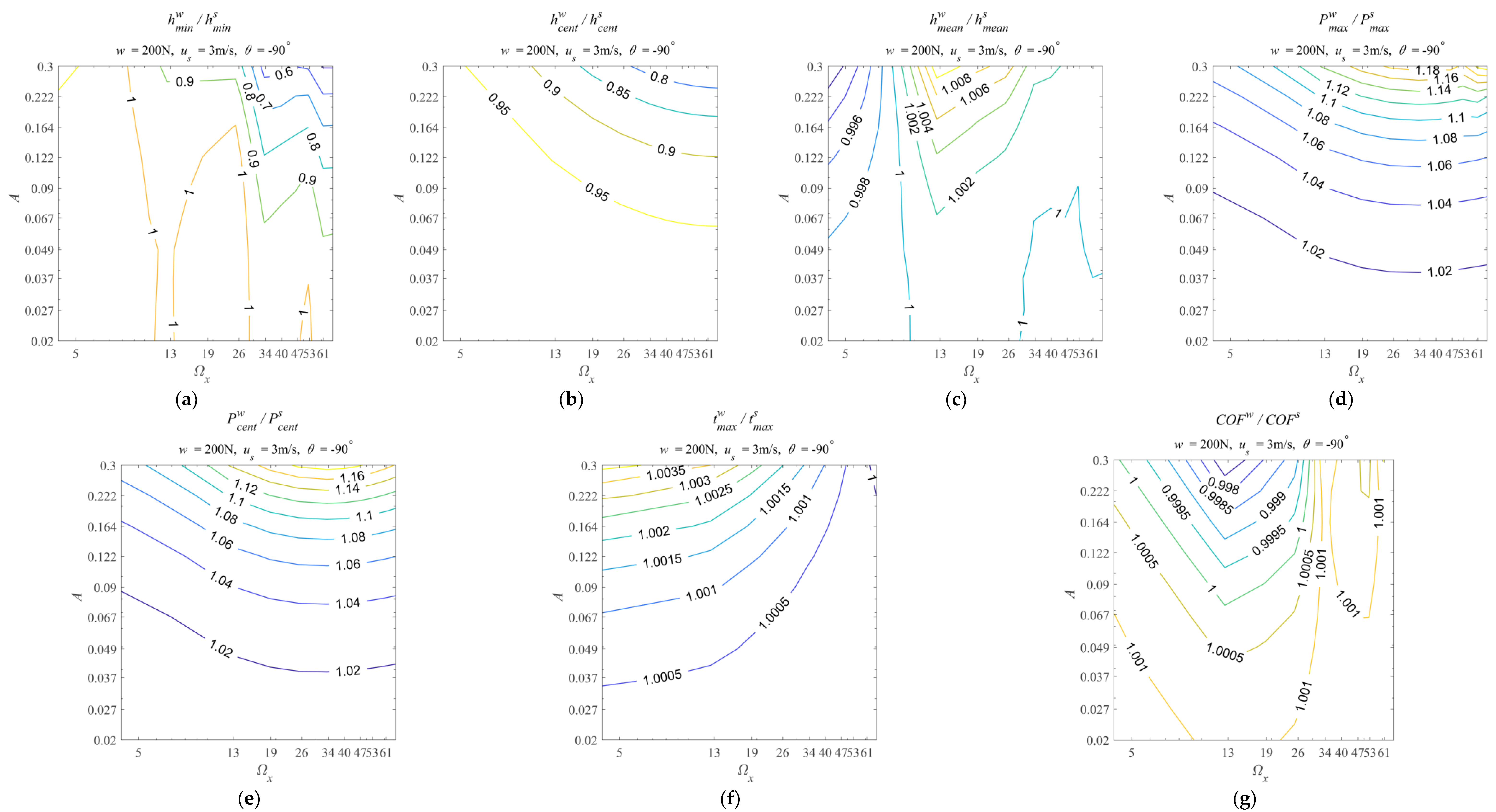
3.4. Further Remarks on the Contour Maps
4. Conclusions
- The transverse and oblique waviness lead to similar results. The minimum film thickness decreases in most cases and can reach a minimum value with a specific combination of amplitude and frequency. Increasing the amplitude and frequency usually increases the central and mean film thickness and maximum pressure but slightly affects the central pressure. Moreover, increasing the amplitude and frequency results in a smaller COF with a higher maximum temperature rise.
- With the waviness shifting toward the longitudinal direction, this usually decreases the minimum, central, and mean film thickness and COF. At the same time, the maximum pressure, central pressure, and maximum temperature rise are only slightly affected.
- The longitudinal waviness leads to different results compared with the other wave directions. It increases the minimum film thickness in some cases, decreases the central film thickness, and slightly affects the mean film thickness, COF, and maximum temperature rise. Moreover, it decreases the maximum pressure but increases the central pressure.
- The effects of the working conditions on the EHL performance under the condition of waviness are generally enhanced as the working conditions become mild. The minimum film thickness can be increased by non-longitudinal waviness, to a certain extent, when the working condition is harsh. The COF and maximum temperature rise are more sensitive to the change in the speed than the change in the load.
- One who wishes to utilize waviness as a beneficial factor in an EHL system should balance its influences on the different performance parameters. The simulated data and corresponding contour maps can be used as a reference for this purpose (see Supplementary Material S2).
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| a | dimensional amplitude of the waviness, m |
| A | non-dimensional amplitude of waviness |
| b | radius of the Hertzian contact zone, m |
| M, N | number of grids in the X and Y directions, respectively |
| ratio of the COF with and without waviness | |
| ratio of the minimum film thickness with and without waviness | |
| ratio of the central film thickness with and without waviness | |
| ratio of the mean film thickness with and without waviness | |
| NT | time step for the termination of the simulation |
| Nw | number of waves in the solution domain |
| ratio of the maximum pressure with and without waviness | |
| ratio of the central pressure with and without waviness | |
| rθ | waviness in direction θ, m |
| ratio of the maximum temperature rise with and without waviness | |
| non-dimensional time in the simulation | |
| non-dimensional time interval of the simulation | |
| u1 | velocity of the smooth surface, m/s |
| u2 | velocity of the waviness, m/s |
| us | sum of u1 and u2, m/s |
| U | non-dimensional speed |
| w | load, N |
| Xs, Xe | non-dimensional start and end coordinates of the solution domain in the X direction |
| Ys, Ye | non-dimensional start and end coordinates of the solution domain in the Y direction |
| non-dimensional start of waviness at with the wave direction θ | |
| α | viscosity–pressure coefficient in the Barus viscosity law, Pa−1 |
| θ | wave direction, degree |
| Λx | non-dimensional wavelength of the waviness |
| Ωx | non-dimensional frequency of the waviness |
References
- Vakis, A.; Yastrebov, V.; Scheibert, J.; Nicola, L.; Dini, D.; Minfray, C.; Almqvist, A.; Paggi, M.; Lee, S.; Limbert, G.; et al. Modeling and simulation in tribology across scales: An overview. Tribol. Int. 2018, 125, 169–199. [Google Scholar] [CrossRef]
- Pei, X.; Pu, W.; Zhang, Y.; Huang, L. Surface topography and friction coefficient evolution during sliding wear in a mixed lubricated rolling-sliding contact. Tribol. Int. 2019, 137, 303–312. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Y.; Jackson, R.L. Theoretical and Finite Element Analysis of Static Friction Between Multi-Scale Rough Surfaces. Tribol. Lett. 2018, 66, 146. [Google Scholar] [CrossRef]
- Li, Q.; Pohrt, R.; Popov, V.L. Adhesive Strength of Contacts of Rough Spheres. Front. Mech. Eng. 2019, 5, 7. [Google Scholar] [CrossRef] [Green Version]
- Violano, G.; Afferrante, L. Contact of rough surfaces: Modeling adhesion in advanced multiasperity models. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 233, 1585–1593. [Google Scholar] [CrossRef]
- Brunetière, N.; Francisco, A. Lubrication Mechanisms Between Parallel Rough Surfaces. Tribol. Lett. 2019, 67, 116. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Xu, Y.; Jackson, R.L. A mixed lubrication analysis of a thrust bearing with fractal rough surfaces. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 234, 608–621. [Google Scholar] [CrossRef]
- Pérez-Ràfols, F.; Almqvist, A. On the stiffness of surfaces with non-Gaussian height distribution. Sci. Rep. 2021, 11, 1863. [Google Scholar] [CrossRef]
- Belhadjamor, M.; Belghith, S.; Mezlini, S.; El Mansori, M. Numerical study of normal contact stiffness: Non-Gaussian roughness and elastic–plastic behavior. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 234, 1368–1380. [Google Scholar] [CrossRef]
- Wang, Y.; Dorgham, A.; Liu, Y.; Wang, C.; Ghanbarzadeh, A.; Wilson, M.C.T.; Neville, A.; Azam, A. Towards optimum additive performance: A numerical study to understand the influence of roughness parameters on the zinc dialkyldithiophosphates tribofilm growth. Lubr. Sci. 2021, 33, 1–14. [Google Scholar] [CrossRef]
- Archard, J.F. Elastic deformation and the laws of friction. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1957, 243, 190–205. [Google Scholar] [CrossRef]
- Whitehouse, D.J.; Archard, J.F. The properties of random surfaces of significance in their contact. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1970, 316, 97–121. [Google Scholar] [CrossRef] [Green Version]
- Sayles, R.S.; Thomas, T.R. Surface topography as a nonstationary random process. Nature 1978, 271, 431–434. [Google Scholar] [CrossRef]
- Nayak, P.R. Random Process Model of Rough Surfaces. J. Lubr. Technol. 1971, 93, 398–407. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. Statistical properties of an isotropic random surface. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1957, 250, 157–174. [Google Scholar] [CrossRef]
- Mandelbrot, B.B. The Fractal Geometry of Nature; Times Books: New York, NY, USA, 1983; Volume 173. [Google Scholar]
- Majumdar, A.; Tien, C.L. Fractal characterization and simulation of rough surfaces. Wear 1990, 136, 313–327. [Google Scholar] [CrossRef]
- Majumdar, A.; Bhushan, B. Fractal Model of Elastic-Plastic Contact between Rough Surfaces. J. Tribol. 1991, 113, 1–11. [Google Scholar] [CrossRef]
- Bhushan, B.; Majumdar, A. Elastic-plastic contact model for bifractal surfaces. Wear 1992, 153, 53–64. [Google Scholar] [CrossRef]
- Persson, B.N.J. Theory of rubber friction and contact mechanics. J. Chem. Phys. 2001, 115, 3840–3861. [Google Scholar] [CrossRef] [Green Version]
- Müser, M.H.; Dapp, W.B.; Bugnicourt, R.; Sainsot, P.; Lesaffre, N.; Lubrecht, T.A.; Persson, B.N.J.; Harris, K.; Bennett, A.; Schulze, K.; et al. Meeting the Contact-Mechanics Challenge. Tribol. Lett. 2017, 65, 118. [Google Scholar] [CrossRef]
- Persson, B.N.J.; Albohr, O.; Tartaglino, U.; Volokitin, A.; Tosatti, E. On the nature of surface roughness with application to contact mechanics, sealing, rubber friction and adhesion. J. Phys. Condens. Matter 2004, 17, R1. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Majumdar, A.; Tien, C.L. Fractal network model for contact conductance. J. Heat Transf. 1991, 113, 516–525. [Google Scholar] [CrossRef]
- Barber, J.R. Bounds on the electrical resistance between contacting elastic rough bodies. Proc. R. Soc. A Math. Phys. Eng. Sci. 2003, 459, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Patir, N.; Cheng, H.S. An average flow model for determining effects of three-dimensional roughness on partial hydrodynamic lubrication. J. Lubr. Technol. 1979, 100, 12–17. [Google Scholar] [CrossRef]
- Patir, N.; Cheng, H.S. Application of average flow model to lubrication between rough sliding surfaces. J. Lubr. Technol. 1979, 101, 220–230. [Google Scholar] [CrossRef]
- Patir, N. Effect of surface roughness orientation on the central film thickness in EHD Contacts. Proc. Inst. Mech. Engl. Part I 1979, 185, 15–21. [Google Scholar]
- Almqvist, A.; Fabricius, J.; Spencer, A.; Wall, P. Similarities and Differences Between the Flow Factor Method by Patir and Cheng and Homogenization. J. Tribol. 2011, 133, 031702. [Google Scholar] [CrossRef]
- Almqvist, A.; Lukkassen, D.; Meidell, A.; Wall, P. New concepts of homogenization applied in rough surface hydrodynamic lubrication. Int. J. Eng. Sci. 2007, 45, 139–154. [Google Scholar] [CrossRef] [Green Version]
- Bayada, G.; Martin, S.; Vázquez, C. Two-scale homogenization of a hydrodynamic Elrod-Adams model. Asymptot. Anal. 2005, 44, 75–110. [Google Scholar]
- Almqvist, A.; Dasht, J. The homogenization process of the Reynolds equation describing compressible liquid flow. Tribol. Int. 2006, 39, 994–1002. [Google Scholar] [CrossRef]
- Sahlin, F.; Larsson, R.; Almqvist, A.; Lugt, P.; Marklund, P. A mixed lubrication model incorporating measured surface topography. Part 1: Theory of flow factors. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2009, 224, 335–351. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Liu, H. Analysis of the effect of surface topography on lubrication using heterogeneous multiscale method. Tribol. Int. 2021, 158, 106922. [Google Scholar] [CrossRef]
- Pei, S.; Xu, H.; Shi, F. A deterministic multiscale computation method for rough surface lubrication. Tribol. Int. 2016, 94, 502–508. [Google Scholar] [CrossRef]
- Nyemeck, A.P.; Brunetière, N.; Tournerie, B. A Mixed Thermoelastohydrodynamic Lubrication Analysis of Mechanical Face Seals by a Multiscale Approach. Tribol. Trans. 2015, 58, 836–848. [Google Scholar] [CrossRef]
- Zhu, D.; Ai, X. Point contact EHL based on optically measured three-dimensional rough surfaces. J. Tribol. 1997, 119, 375–384. [Google Scholar] [CrossRef]
- Minet, C.; Brunetière, N.; Tournerie, B. Mixed Lubrication Modelling in Mechanical Face Seals. In Proceedings of the STLE/ASME International Joint Tribology Conference 2008, Miami, FL, USA, 20–22 October 2008; pp. 477–479. [Google Scholar]
- Ren, N.; Zhu, D.; Chen, W.W.; Liu, Y.; Wang, Q.J. A Three-Dimensional Deterministic Model for Rough Surface Line-Contact EHL Problems. J. Tribol. 2008, 131, 011501. [Google Scholar] [CrossRef]
- Demirci, I.; Mezghani, S.; Yousfi, M.; El Mansori, M. Multiscale Analysis of the Roughness Effect on Lubricated Rough Contact. J. Tribol. 2013, 136, 011501. [Google Scholar] [CrossRef] [Green Version]
- Lorentz, B.; Albers, A. A numerical model for mixed lubrication taking into account surface topography, tangential adhesion effects and plastic deformations. Tribol. Int. 2013, 59, 259–266. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, Q.J. Effect of Roughness Orientation on the Elastohydrodynamic Lubrication Film Thickness. J. Tribol. 2013, 135, 031501. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, J.; Wang, Q.J. On the Stribeck Curves for Lubricated Counterformal Contacts of Rough Surfaces. J. Tribol. 2015, 137, 021501. [Google Scholar] [CrossRef]
- Li, L.; Yang, J. Surface roughness effects on point contact elastohydrodynamic lubrication in linear rolling guide with fractal surface topographies. Ind. Lubr. Tribol. 2018, 70, 589–598. [Google Scholar] [CrossRef]
- Pei, J.; Han, X.; Tao, Y.; Feng, S. Mixed elastohydrodynamic lubrication analysis of line contact with Non-Gaussian surface roughness. Tribol. Int. 2020, 151, 106449. [Google Scholar] [CrossRef]
- Venner, C.H.; Lubrecht, A.A. An Engineering Tool for the Quantitative Prediction of General Roughness Deformation in EHL Contacts Based on Harmonic Waviness Attenuation. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2005, 219, 303–312. [Google Scholar] [CrossRef]
- Bair, S.; Winer, W.O. The High Pressure High Shear Stress Rheology of Liquid Lubricants. J. Tribol. 1992, 114, 1–9. [Google Scholar] [CrossRef]
- Wang, Y.; Dorgham, A.; Liu, Y.; Wang, C.; Wilson, M.C.T.; Neville, A.; Azam, A. An Assessment of Quantitative Predictions of Deterministic Mixed Lubrication Solvers. J. Tribol. 2020, 143, 011601. [Google Scholar] [CrossRef]
- He, T.; Zhu, D.; Wang, J.; Wang, Q.J. Experimental and Numerical Investigations of the Stribeck Curves for Lubricated Counterformal Contacts. J. Tribol. 2016, 139, 021505. [Google Scholar] [CrossRef]
- Pu, W.; Wang, J.; Zhu, D. Progressive Mesh Densification Method for Numerical Solution of Mixed Elastohydrodynamic Lubrication. J. Tribol. 2015, 138, 021502. [Google Scholar] [CrossRef]
- Wang, W.-Z.; Hu, Y.-Z.; Liu, Y.-C.; Zhu, D. Solution agreement between dry contacts and lubrication system at ultra-low speed. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2010, 224, 1049–1060. [Google Scholar] [CrossRef]
- Venner, C.H.; Lubrecht, A.A. Numerical Analysis of the Influence of Waviness on the Film Thickness of a Circular EHL Contact. J. Tribol. 1996, 118, 153–161. [Google Scholar] [CrossRef]
- Ehret, P.; Dowson, D.; Taylor, C. Waviness Orientation in EHL Point Contact. In The Third Body Concept Interpretation of Tribological Phenomena; Dowson, D., Taylor, C.M., Childs, T.H.C., Dalmaz, G., Berthier, Y., Flamand, L., Georges, J.-M., Lubrecht, A.A., Eds.; Tribology Series; Elsevier: Amsterdam, The Netherlands, 1996; Volume 31, pp. 235–244. [Google Scholar] [CrossRef]
- Reddyhoff, T.; Schmidt, A.; Spikes, H. Thermal Conductivity and Flash Temperature. Tribol. Lett. 2019, 67, 22. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Zhang, B.; Bader, N.; Poll, G.; Venner, C. Influences of solid and lubricant thermal conductivity on traction in an EHL circular contact. Tribol. Int. 2020, 146, 106059. [Google Scholar] [CrossRef]
- Habchi, W.; Bair, S. The role of the thermal conductivity of steel in quantitative elastohydrodynamic friction. Tribol. Int. 2020, 142, 105970. [Google Scholar] [CrossRef]
- Pu, W.; Zhu, D.; Wang, J. A Starved Mixed Elastohydrodynamic Lubrication Model for the Prediction of Lubrication Performance, Friction and Flash Temperature with Arbitrary Entrainment Angle. J. Tribol. 2017, 140, 031501. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Disk (Body 1) | Ball (Body 2) | Fluid |
|---|---|---|---|
| Young’s modulus, (GPa) | 206 | 206 | — |
| Poisson’s ratio | 0.3 | 0.3 | — |
| Density, (g/cm3) | 7.865 | 7.865 | 0.8433 |
| Thermal conductivity, (W/(m∙K)) | 46 | 46 | 0.145 |
| Specific heat, (N∙m/(g∙K)) | 0.46 | 0.46 | 2 |
| Thermal expansivity (K−1) | — | — | 0.00064 |
| Viscosity at 40 °C, (Pa∙s) | 0.0279 | ||
| Temperature–viscosity coefficient, (K−1) | 0.029 | ||
| Pressure–viscosity coefficient, (GPa−1) | 22.224 | ||
| Ball radius, (m) | 9.525 × 10−3 | ||
| Slide-to-roll ratio, SRR | −0.2 |
| Load, w (N) | 200 | 500 | ||
|---|---|---|---|---|
| Speed, us (m/s) | 0.3 | 3 | 0.3 | 3 |
| (μm) | 0.0677 | 0.3278 | 0.0628 | 0.3152 |
| (μm) | 0.0181 | 0.1465 | 0.0104 | 0.1141 |
| Average film thickness, (μm) | 0.0617 | 0.3004 | 0.0571 | 0.2867 |
| Central pressure, (GPa) | 1.1128 | 1.1227 | 1.5081 | 1.5167 |
| Maximum pressure, (GPa) | 1.1128 | 1.1228 | 1.5081 | 1.5168 |
| Coefficient of friction, | 0.0819 | 0.0730 | 0.0882 | 0.0759 |
| Maximum temperature rise, (K) | 317.9658 | 332.5601 | 321.5860 | 343.0376 |
| Parameter | Min | Max |
|---|---|---|
| 0.772 | 1.000 | |
| 1.000 | 1.451 | |
| 1.000 | 1.423 | |
| 1.000 | 2.042 | |
| 0.998 | 1.016 | |
| 0.983 | 1.001 | |
| 1.000 | 1.030 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, C.; Du, J.; Morina, A. Understanding the Influences of Multiscale Waviness on the Elastohydrodynamic Lubrication Performance, Part I: The Full-Film Condition. Lubricants 2022, 10, 368. https://doi.org/10.3390/lubricants10120368
Wang Y, Li C, Du J, Morina A. Understanding the Influences of Multiscale Waviness on the Elastohydrodynamic Lubrication Performance, Part I: The Full-Film Condition. Lubricants. 2022; 10(12):368. https://doi.org/10.3390/lubricants10120368
Chicago/Turabian StyleWang, Yuechang, Changlin Li, Jianjun Du, and Ardian Morina. 2022. "Understanding the Influences of Multiscale Waviness on the Elastohydrodynamic Lubrication Performance, Part I: The Full-Film Condition" Lubricants 10, no. 12: 368. https://doi.org/10.3390/lubricants10120368
APA StyleWang, Y., Li, C., Du, J., & Morina, A. (2022). Understanding the Influences of Multiscale Waviness on the Elastohydrodynamic Lubrication Performance, Part I: The Full-Film Condition. Lubricants, 10(12), 368. https://doi.org/10.3390/lubricants10120368