2.1. Rub-Impact Dynamic Model and Equations
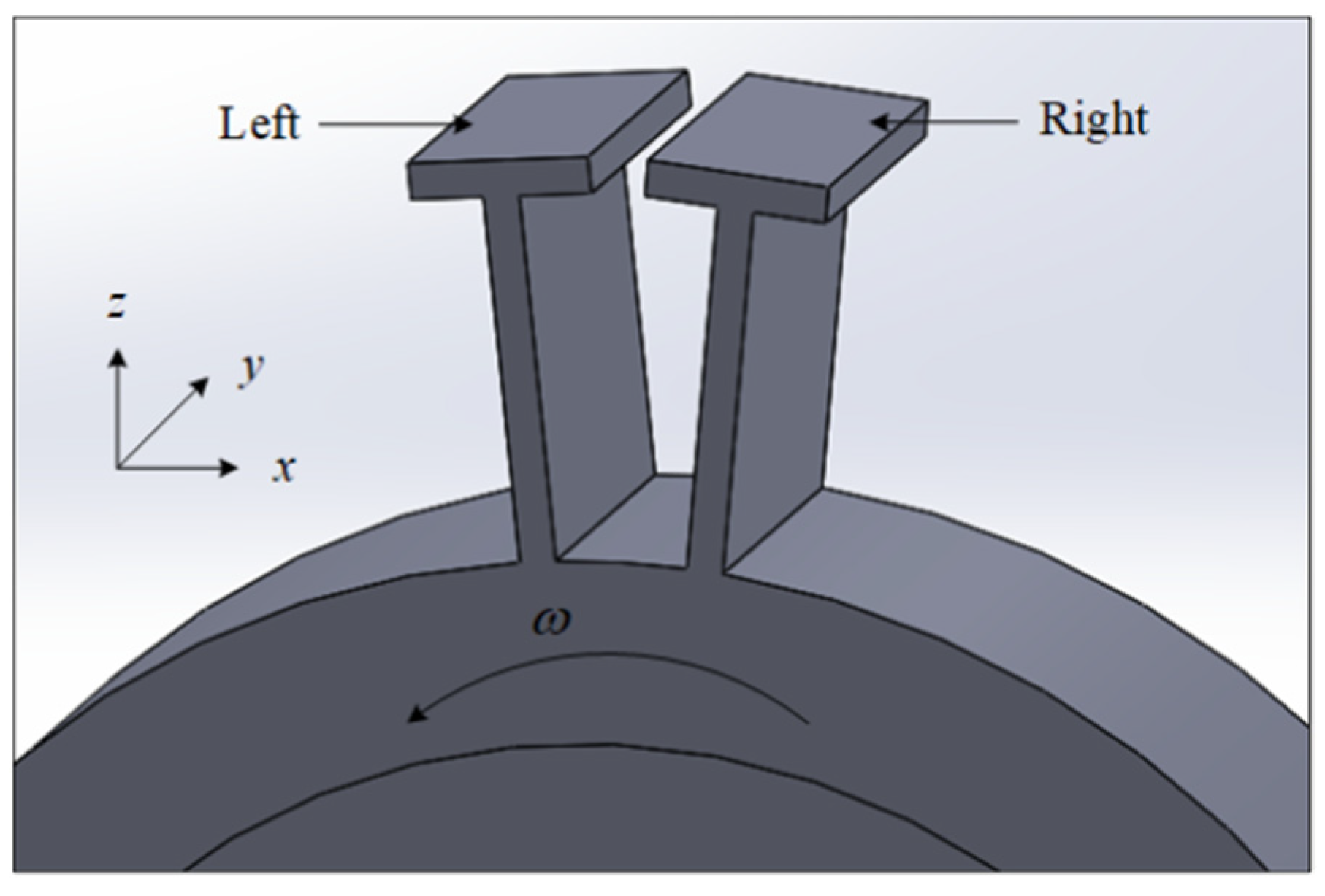
As shown in
Figure 1, in the working condition of the turbine blades, the blades will undergo contact-separation transition and stick-slip transition due to the bending vibration in both
and
directions. In the contact state, the impact and dry friction occurs in the contact surface. In engineering practice, the shrouded blades vibrate in a three-dimensional direction which is very complicated. In this paper, the bending vibration of the blade in
direction and
direction is discussed, while the bending vibration in
direction, which is very small in comparison to that in
and
direction, and the torsional vibration is not considered for simplicity. Based on the analysis above, a spring-mass model of the structure in
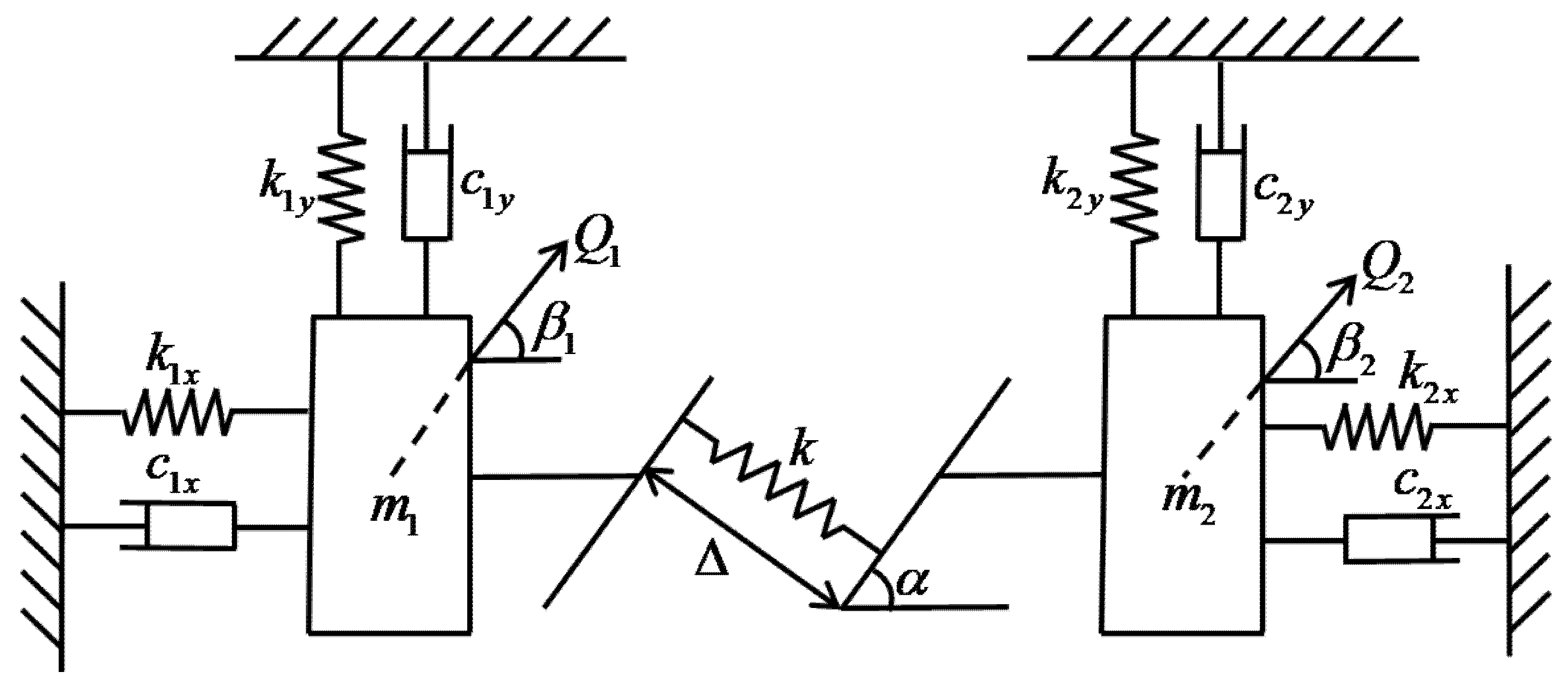
Figure 1 can be set up and shown in
Figure 2.
When the initial gap is negative, a preload is applied between the two shrouds, otherwise, there is a certain initial distance between the two shrouds.
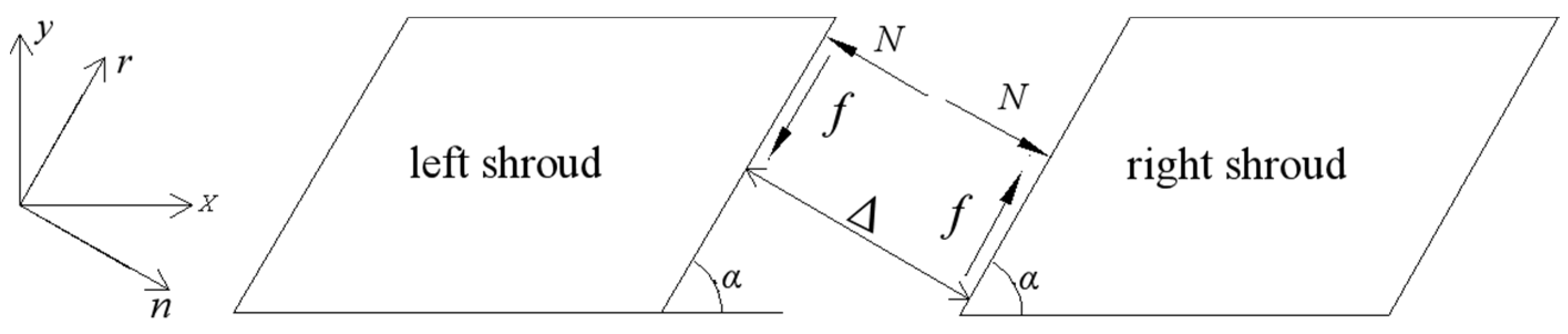
The dry friction and impact between the two shrouds are shown in
Figure 3, which are very complex in the process of the vibration of the blades. As the torsional vibration is not considered, the contact of two blades is face to face. The direction
is tangential to the contact, while the direction
is normal to the contact. The relation motion in
and
direction will lead to stick-slip transition and contact-separation transition separately.
In the process of the vibration of the two blades, there are two stages: the separation stage and the contact stage in which stick-slip transition occurs. To analyze the normal load and friction force, displacements of blades in
and
directions can be projected into
and
directions. Then the displacements of shrouded blades in
and
directions can be written as:
In Equation (1), and denote the displacements of the left and the right shroud in r direction, while and denote the displacements of the left and the right shroud in direction.
According to
Figure 2 and
Figure 3, kinetic equations of the blades can be written as:
Due to the symmetry characteristics of the shrouded blades, some parameters of the two blades are consistent. So:
,
,
,
,
,
,
. Equation (2) can be expressed as:
The normal load is simulated by a linear spring with its stiffness of
and can be described as Equation (4).
Accordingly, the bilinear hysteresis model and the Coulomb friction model which are shown in
Figure 4 are introduced separately to simulate the friction force
. In order to simplify the calculation, the difference of kinetic and static friction coefficients is not considered in this paper. Thus, the friction coefficient is denoted as
.
In
Figure 4a, the Coulomb friction model is introduced. With the Coulomb friction model, points 1 and 2 are always attached to the left shroud and the right shroud, respectively. In contrast with the bilinear hysteresis model, the elastic deformation is not considered in the Coulomb friction model, and the viscous state of the contact surface is actually a relatively static state. In this paper, as described in reference [
26], an error limit is given for the relative velocity and the stuck state of the contact surface is studied.
(1) When
, points 1 and 2 remain relatively static, Equations (5) and (6) can be obtained.
Performing a linear operation on formulas in Equation (3), Equations (7) and (8) are derived.
Based on Equations (5)–(8), Equation (9) can be obtained.
If , the friction force is calculated by Equation (9).
Otherwise, equals to and reverses its direction.
(2) If , relative slipping occurs at the contact interface, the value of the sliding friction force equals .
In
Figure 4b, the bilinear hysteresis model is introduced and the friction force is simulated by a spring with a finite contact stiffness
. The spring has no initial length and can yield. Points 1 and 2 are attached to the left shroud and the right shroud, respectively, at all times. Point
is the sliding contact point that can slide relative to point 2. Initially, Points 1, 2 and
coincide with each other, and point
is attached to point 2 with a limiting friction force. The displacements of the left and the right shroud in
direction are denoted by
and
, respectively, while that of the sliding contact
relative to the bladed disc is denoted by
. With two shrouds moving, point
keeps static with the right shroud when
is less than
and keeps static with the left shroud when the distance of the point 1 and
is equal to
. The friction force can be determined by Equation (11), and the key to friction calculation is to trace the position of point
.
2.2. The Nondimensionalization of the Kinetic Equations
To analyze the nonlinear dynamics of the system conveniently, the nondimensionalization can be introduced as follows.
Denote , , , , , , , , , , , , , , , , , , .
So, Equation (3) can be rewritten as Equation (11).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}