On the Transient Effects at the Beginning of 3D Elastic-Plastic Rolling Contacts for a Circular Point Contact Considering Isotropic Hardening



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Method and Numerical Modeling
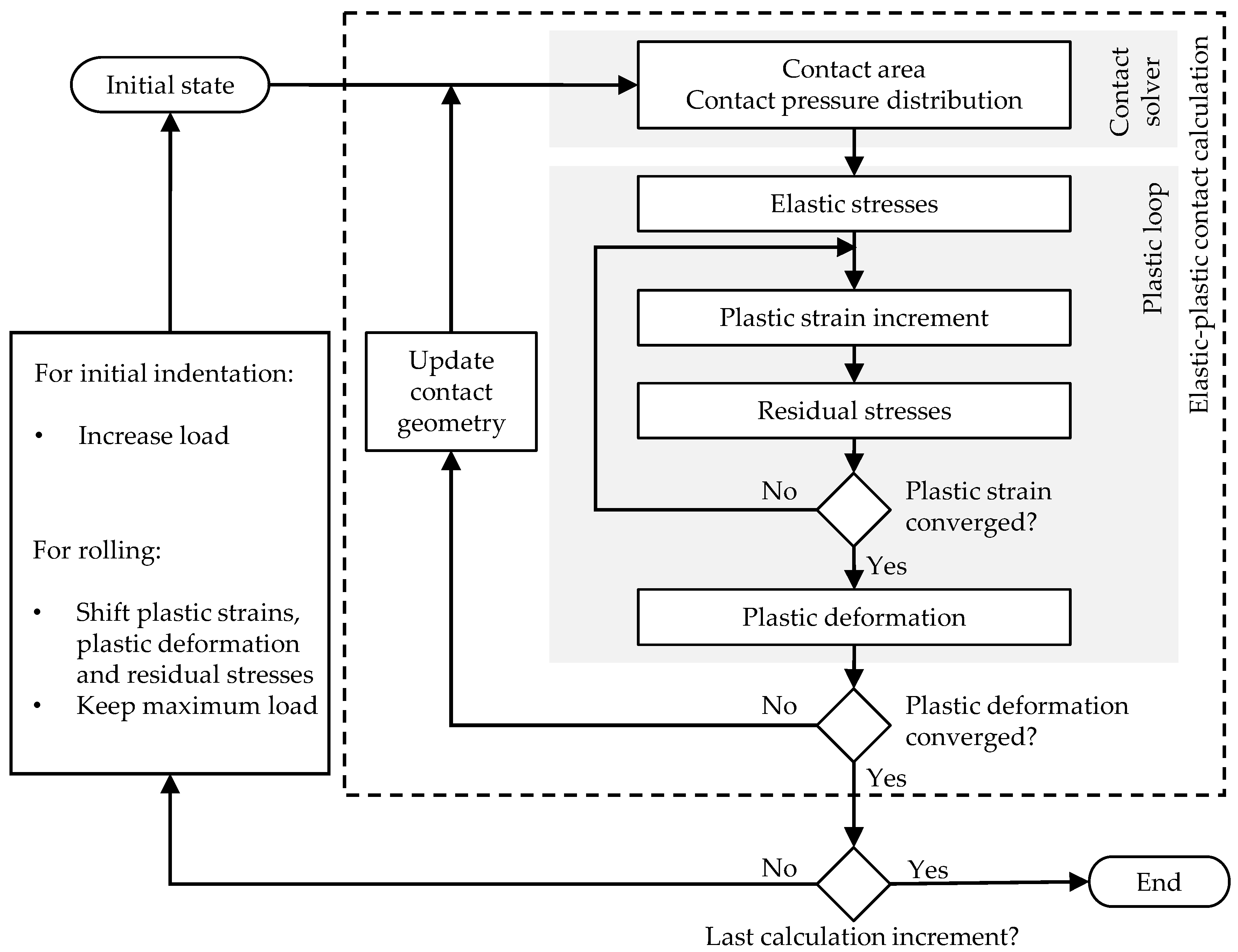
2.1. Rolling Contact Simulation Using a Semi-Analytical Method
2.2. Model Setup
3. Results and Discussion
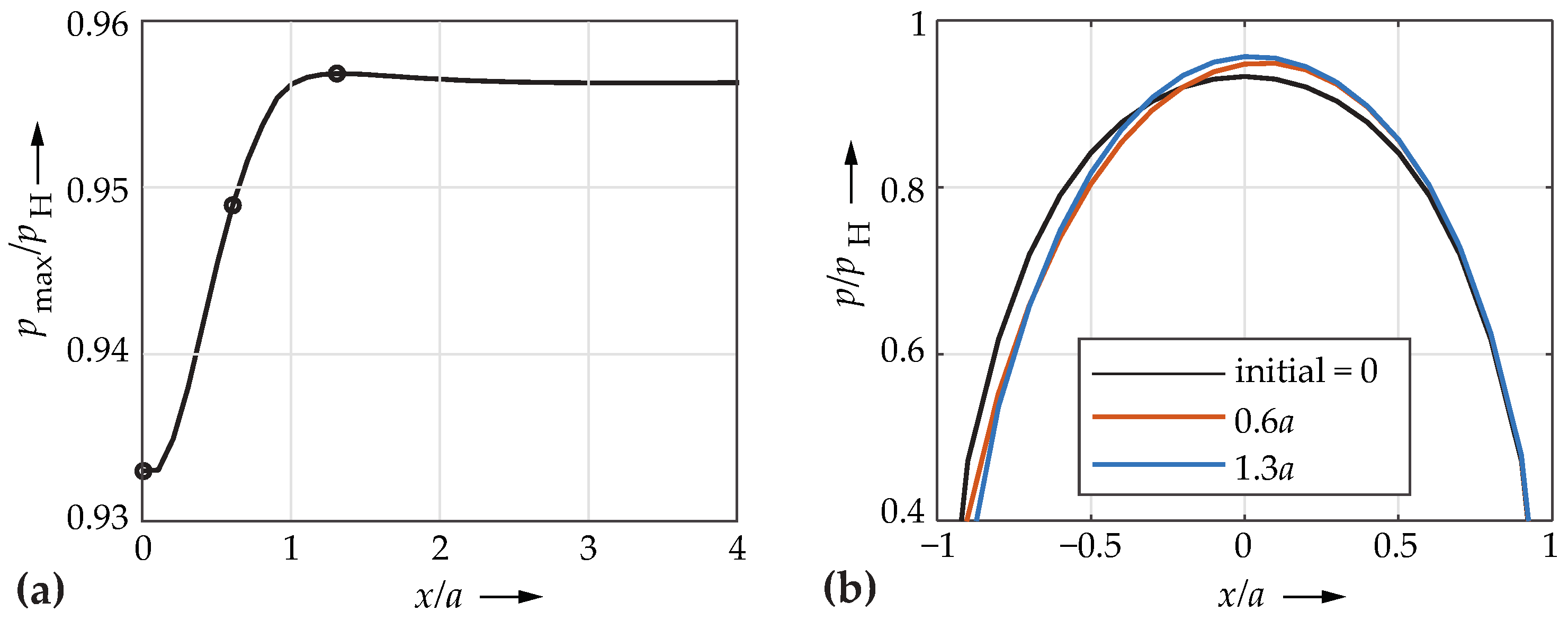
3.1. Change of the Pressure Distribution Due to a Change in Conformity
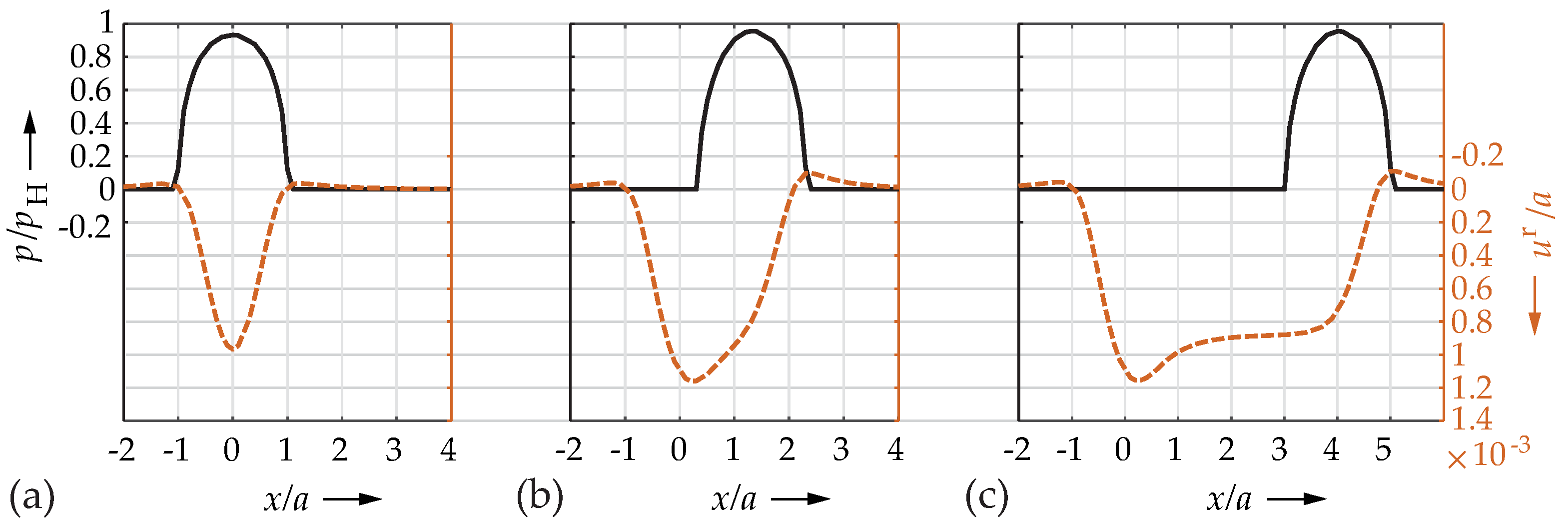
3.2. Plastic Strains and Associated Plastic Deformations
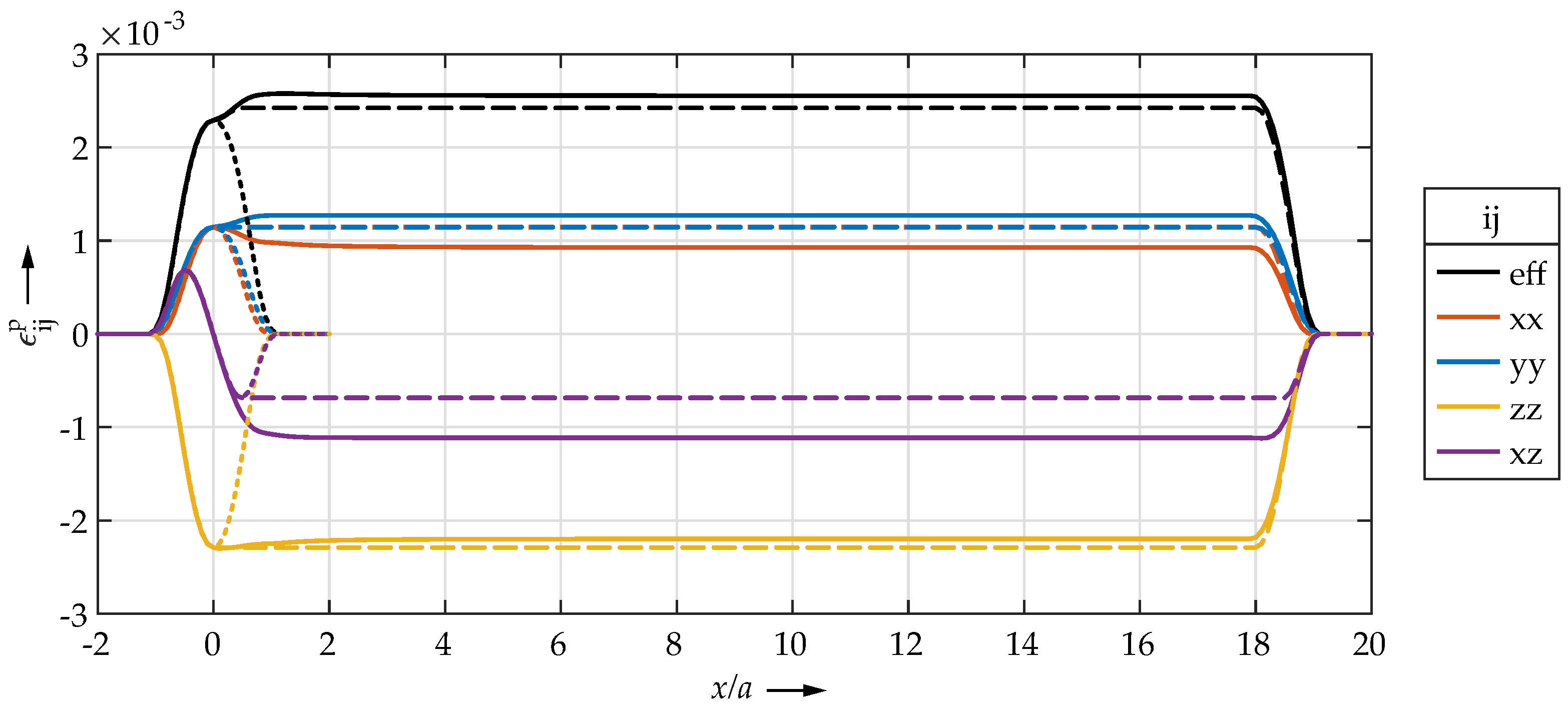
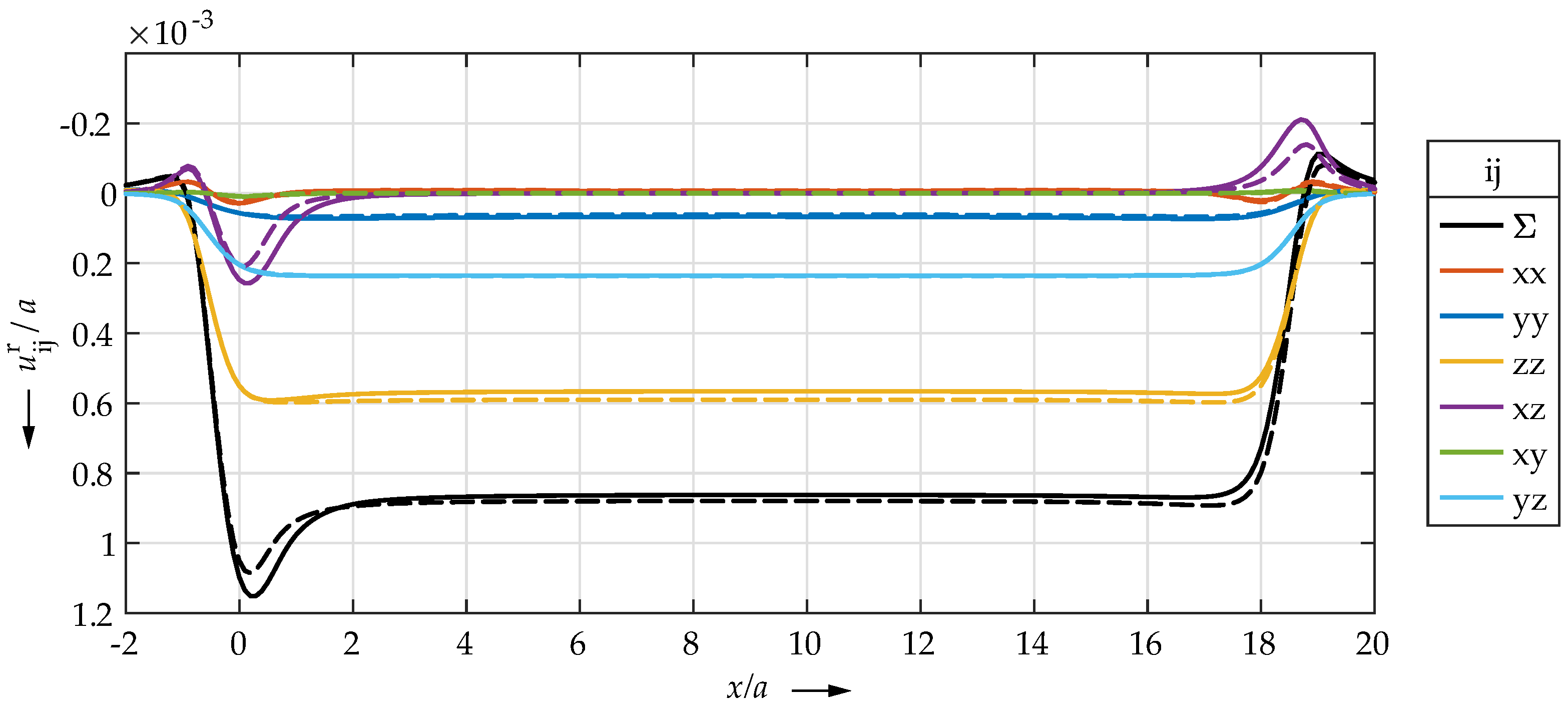
3.3. Development of the Strain Components
4. Conclusions
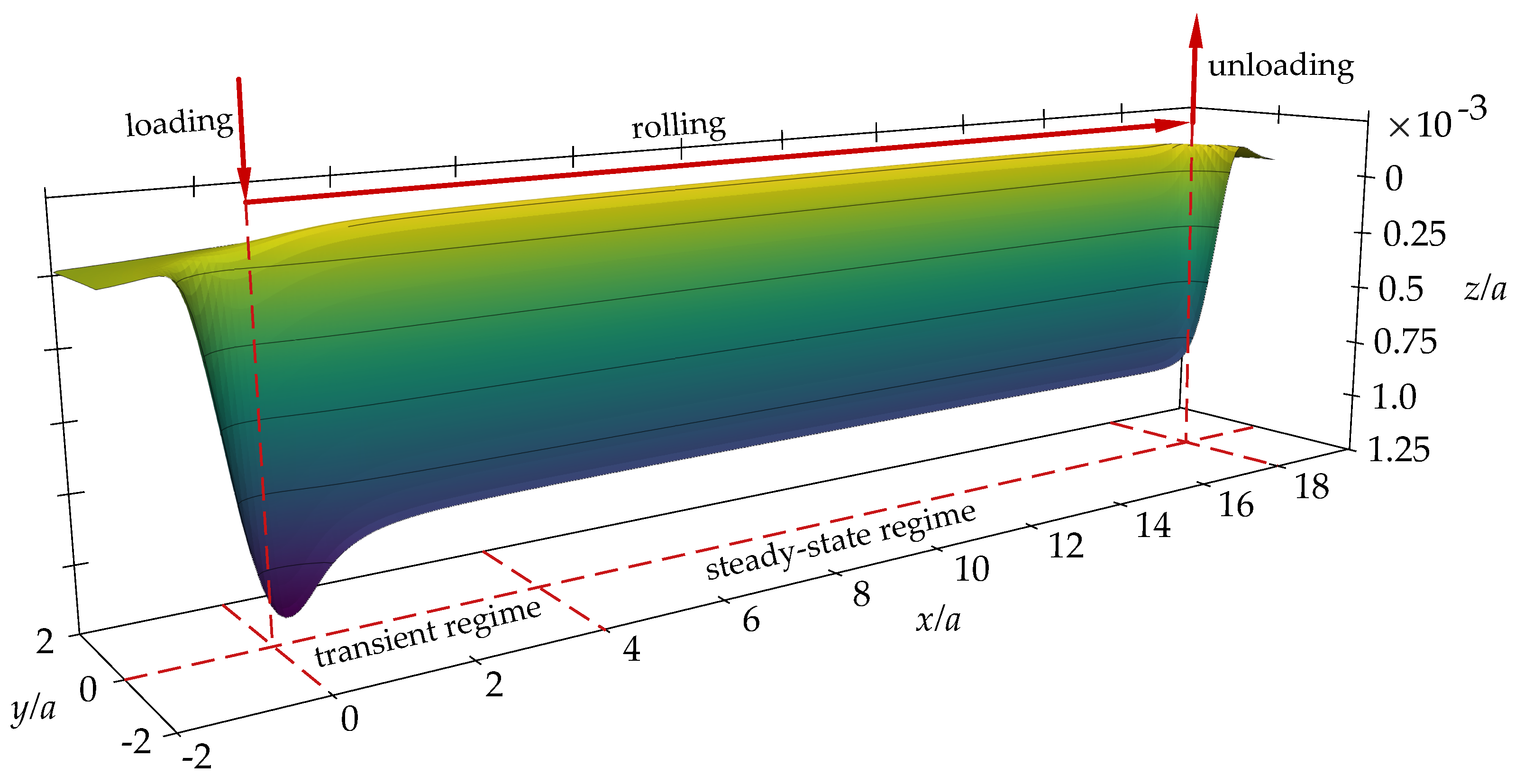
- The strain state at the very beginning of the rolling path is characterized by the vertical initial indentation. In contrast, during rolling, plastification occurs significantly at the leading edge due to the isotropic hardening behavior. The result is a different strain state in the steady-state regime. The transition between the two strain states takes place due to the decaying influence of the initial indentation as the distance from the start of rolling increases.
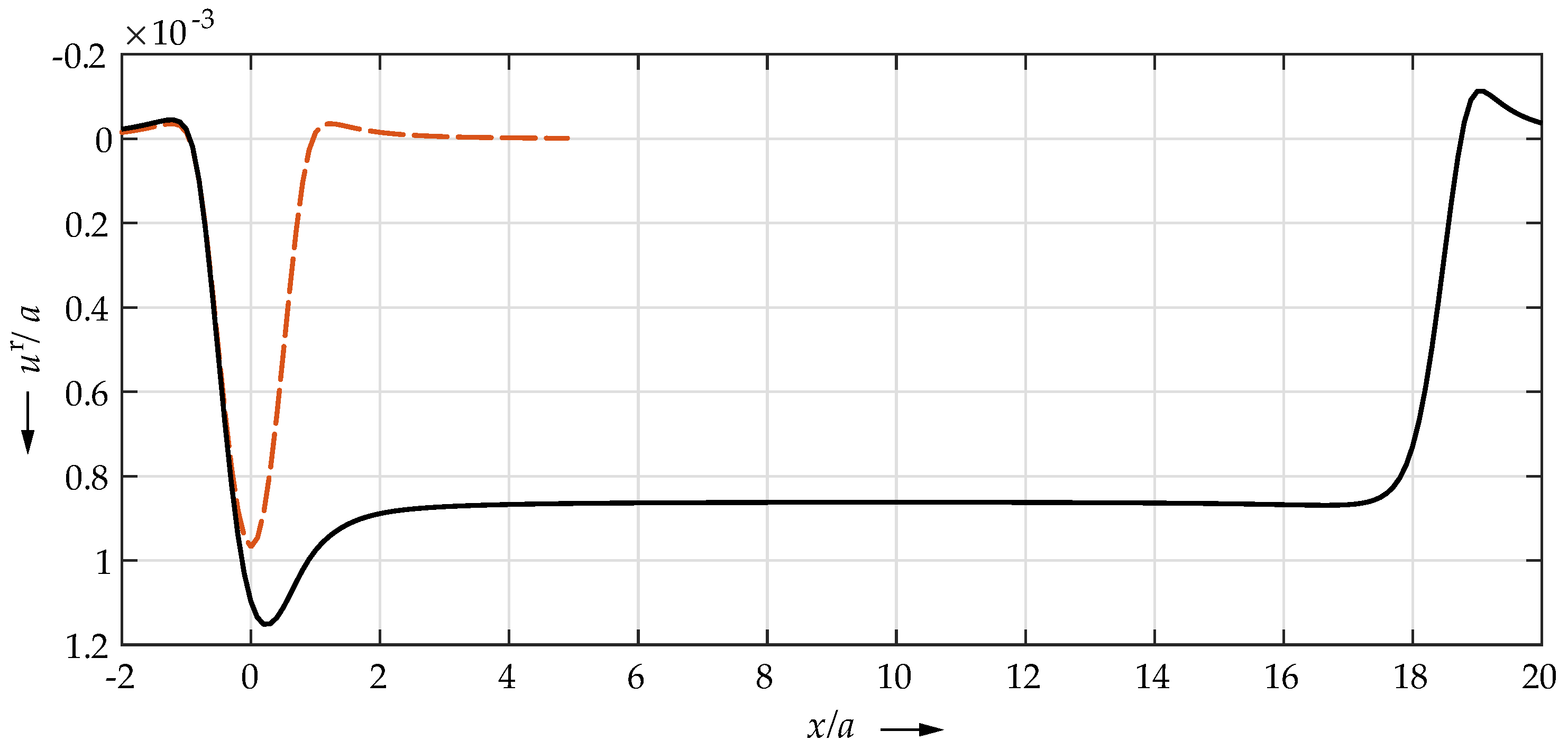
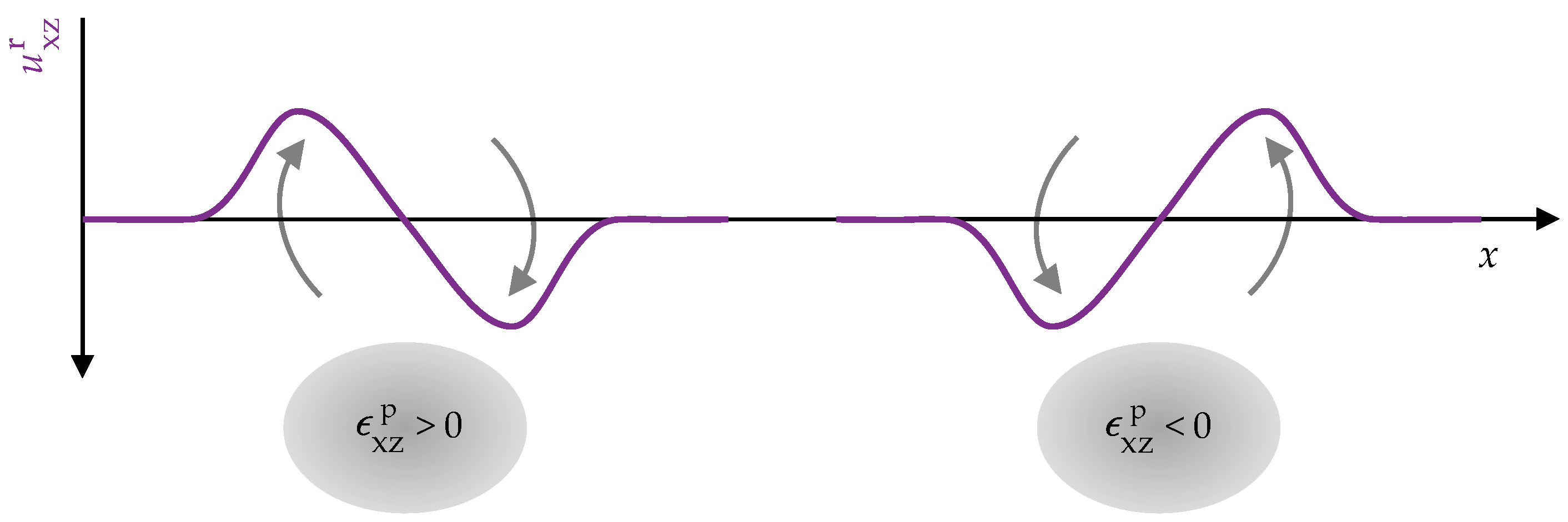
- The profile of the plastic deformation is only influenced to a minor extend by transient effects. The deep indentation at the beginning, as well as the shoulders at the beginning and end of the rolling path, are rather determined by the spacial distribution of the plastic strains, especially the shear strain with a change of sign at the beginning of the rolling path.
- The history of the pressure distribution is mainly a result of the previously described shape of the plastic deformation of the surface, and therefore the conformity of the contact. Certainly, an increase in pressure is coupled with a change in stresses and strains, and thus in plastic deformation, but for the model considered here, these influences on the transient behavior seem to be very small.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| a | contact radius given by Hertzian theory |
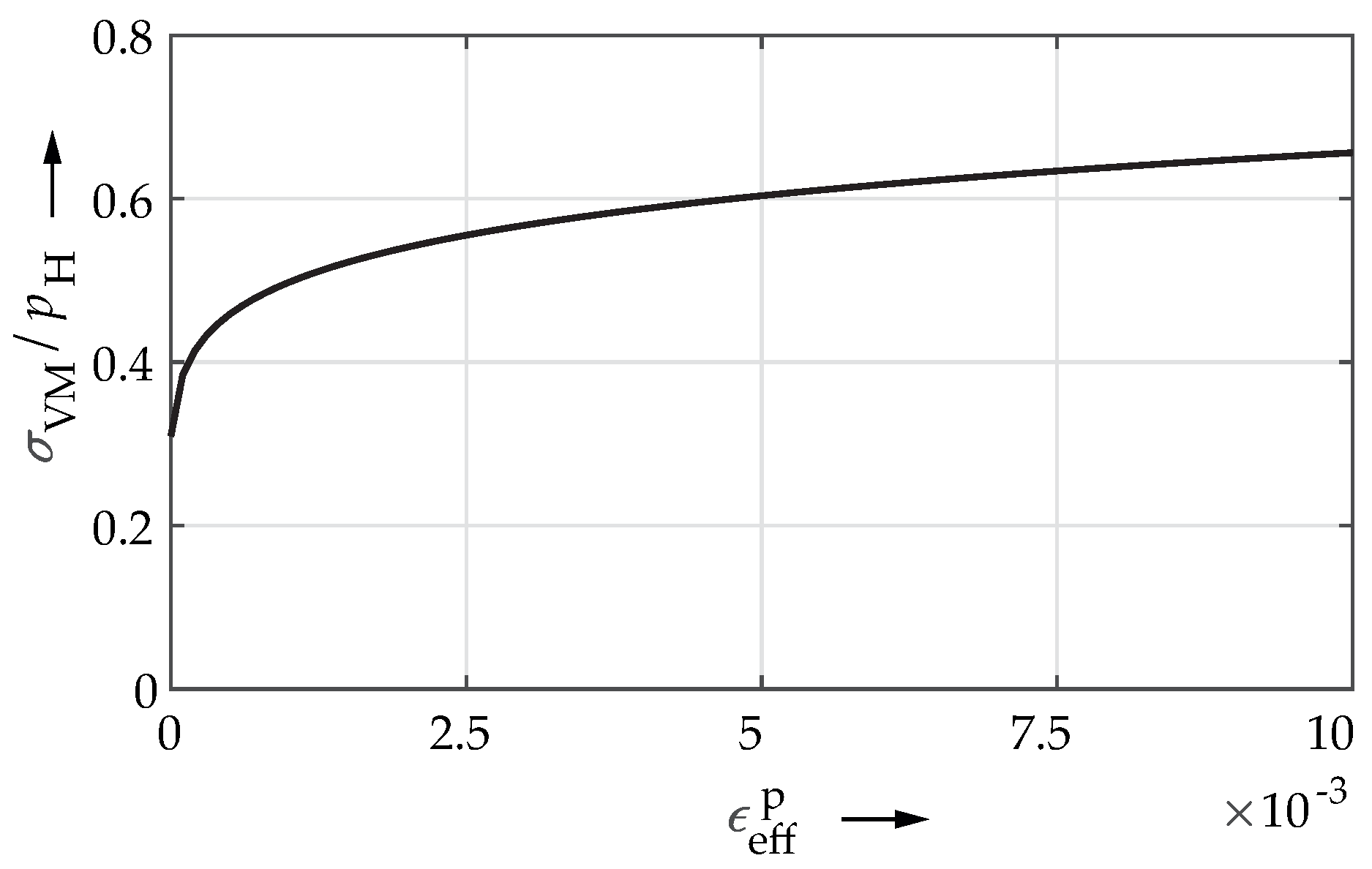
| B, C, n | swift isotropic hardening law parameters |
| E | Youngs’s modulus |
| F | applied load |
| h, | surface separation, initial gap |
| i, j | tensor indices |
| k, l | indices of the surface grid |
| p | contact pressure |
| maximum contact pressure given by Hertzian theory | |
| maximum contact pressure | |
| R | radius of the sphere |
| s | deviatoric stress tensor |
| u | total surface deformation |
| plastic surface deformation | |
| x, y, z | space coordinates |
| , | computational domain, contact area |
| mesh size | |
| rigid body displacement | |
| plastic strain tensor | |
| effective plastic strain | |
| Poisson’s ratio | |
| yield stress |
References
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Jacq, C.; Nélias, D.; Lormand, G.; Girodin, D. Development of a Three-Dimensional Semi-Analytical Elastic-Plastic Contact Code. J. Tribol. 2002, 124, 653–667. [Google Scholar] [CrossRef]
- Nélias, D.; Antaluca, E.; Boucly, V. Rolling of an Elastic Ellipsoid Upon an Elastic-Plastic Flat. J. Tribol. 2007, 129, 791–800. [Google Scholar] [CrossRef]
- Boucly, V.; Nélias, D.; Green, I. Modeling of the Rolling and Sliding Contact Between Two Asperities. J. Tribol. 2007, 129, 235–245. [Google Scholar] [CrossRef]
- Chen, W.W.; Wang, Q.J.; Wang, F.; Keer, L.M.; Cao, J. Three-Dimensional Repeated Elasto-Plastic Point Contacts, Rolling, and Sliding. J. Appl. Mech. 2008, 75, 021021. [Google Scholar] [CrossRef]
- Chaise, T.; Nélias, D. Contact Pressure and Residual Strain in 3D Elasto-Plastic Rolling Contact for a Circular or Elliptical Point Contact. J. Tribol. 2011, 133, 041402. [Google Scholar] [CrossRef]
- Flores, S.E.; Pontin, M.G.; Zok, F.W. Scratching of Elastic/Plastic Materials with Hard Spherical Indenters. J. Appl. Mech. 2008, 75, 061021. [Google Scholar] [CrossRef]
- van Breemen, L.C.A.; Govaert, L.E.; Meijer, H.E.H. Scratching polycarbonate: A quantitative model. Wear 2012, 274–275, 238–247. [Google Scholar] [CrossRef]
- Pletz, M.; Meyer, K.A.; Künstner, D.; Scheriau, S.; Daves, W. Cyclic plastic deformation of rails in rolling/sliding contact—Quasistatic FE calculations using different plasticity models. Wear 2019, 436–437, 202992. [Google Scholar] [CrossRef]
- Bhargava, V.; Hahn, G.T.; Rubin, C.A. An Elastic-Plastic Finite Element Model of Rolling Contact, Part 1: Analysis of Single Contacts. J. Appl. Mech. 1985, 52, 67–74. [Google Scholar] [CrossRef]
- Dang Van, K.; Maitournam, M.H. Steady-state flow in classical elastoplasticity: Applications to repeated rolling and sliding contact. J. Mech. Phys. Solids 1993, 41, 1691–1710. [Google Scholar] [CrossRef]
- Dang Van, K.; Maitournam, M.H. Rolling contact in railways: Modelling, simulation and damage prediction. Fatigue Fract. Eng. Mater. Struct. 2003, 26, 939–948. [Google Scholar] [CrossRef]
- Meyer, K.A.; Skrypnyk, R.; Pletz, M. Efficient 3d finite element modeling of cyclic elasto-plastic rolling contact. Tribol. Int. 2021, 161, 107053. [Google Scholar] [CrossRef]
- Boucly, V.; Nélias, D.; Liu, S.; Wang, Q.J.; Keer, L.M. Contact Analyses for Bodies With Frictional Heating and Plastic Behavior. J. Tribol. 2005, 127, 335–364. [Google Scholar] [CrossRef]
- Nélias, D.; Boucly, V.; Brunet, M. Elastic-Plastic Contact Between Rough Surfaces: Proposal for a Wear or Running-In Model. J. Tribol. 2006, 128, 236–244. [Google Scholar] [CrossRef]
- Gallego, L.; Nélias, D.; Deyber, S. A fast and efficient contact algorithm for fretting problems applied to fretting modes I, II and III. Wear 2010, 268, 208–222. [Google Scholar] [CrossRef]
- Polonsky, I.A.; Keer, L.M. A numerical method for solving rough contact problems based on the multi-level multi-summation and conjugate gradient techniques. Wear 1999, 231, 206–219. [Google Scholar] [CrossRef]
- Love, A.E.H. IX. The stress produced in a semi-infinite solid by pressure on part of the boundary. Philos. Trans. R. Soc. A 1929, 228, 377–420. [Google Scholar] [CrossRef]
- Chiu, Y.P. On the Stress Field Due to Initial Strains in a Cuboid Surrounded by an Infinite Elastic Space. J. Appl. Mech. 1977, 44, 587–590. [Google Scholar] [CrossRef]
- Chiu, Y.P. On the Stress Field and Surface Deformation in a Half Space With a Cuboidal Zone in Which Initial Strains Are Uniform. J. Appl. Mech. 1977, 45, 302–306. [Google Scholar] [CrossRef]
- Fotiu, P.A.; Nemat-Nasser, S. A universal integration algorithm for rate-dependent elastoplasticity. Comput. Struct. 1996, 59, 1173–1184. [Google Scholar] [CrossRef]
- Liu, S.; Wang, Q.; Liu, G. A versatile method of discrete convolution and FFT (DC-FFT) for contact analyses. Wear 2000, 243, 101–111. [Google Scholar] [CrossRef]
- Swift, H.W. Plastic instability under plane stress. J. Mech. Phys. Solids 1952, 1, 1–18. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Juettner, M.; Bartz, M.; Tremmel, S.; Wartzack, S. On the Transient Effects at the Beginning of 3D Elastic-Plastic Rolling Contacts for a Circular Point Contact Considering Isotropic Hardening. Lubricants 2022, 10, 47. https://doi.org/10.3390/lubricants10030047
Juettner M, Bartz M, Tremmel S, Wartzack S. On the Transient Effects at the Beginning of 3D Elastic-Plastic Rolling Contacts for a Circular Point Contact Considering Isotropic Hardening. Lubricants. 2022; 10(3):47. https://doi.org/10.3390/lubricants10030047
Chicago/Turabian StyleJuettner, Michael, Marcel Bartz, Stephan Tremmel, and Sandro Wartzack. 2022. "On the Transient Effects at the Beginning of 3D Elastic-Plastic Rolling Contacts for a Circular Point Contact Considering Isotropic Hardening" Lubricants 10, no. 3: 47. https://doi.org/10.3390/lubricants10030047
APA StyleJuettner, M., Bartz, M., Tremmel, S., & Wartzack, S. (2022). On the Transient Effects at the Beginning of 3D Elastic-Plastic Rolling Contacts for a Circular Point Contact Considering Isotropic Hardening. Lubricants, 10(3), 47. https://doi.org/10.3390/lubricants10030047