Thermal Effects in Slender EHL Contacts



Abstract
:1. Introduction
2. Methods
2.1. Experimental Investigation
- pure rolling ;
- negative sliding (counter steel body moves faster than glass disk);
- positive sliding (glass disk moves faster than counter steel body).
2.2. Numerical Investigation
2.2.1. Governing Equations
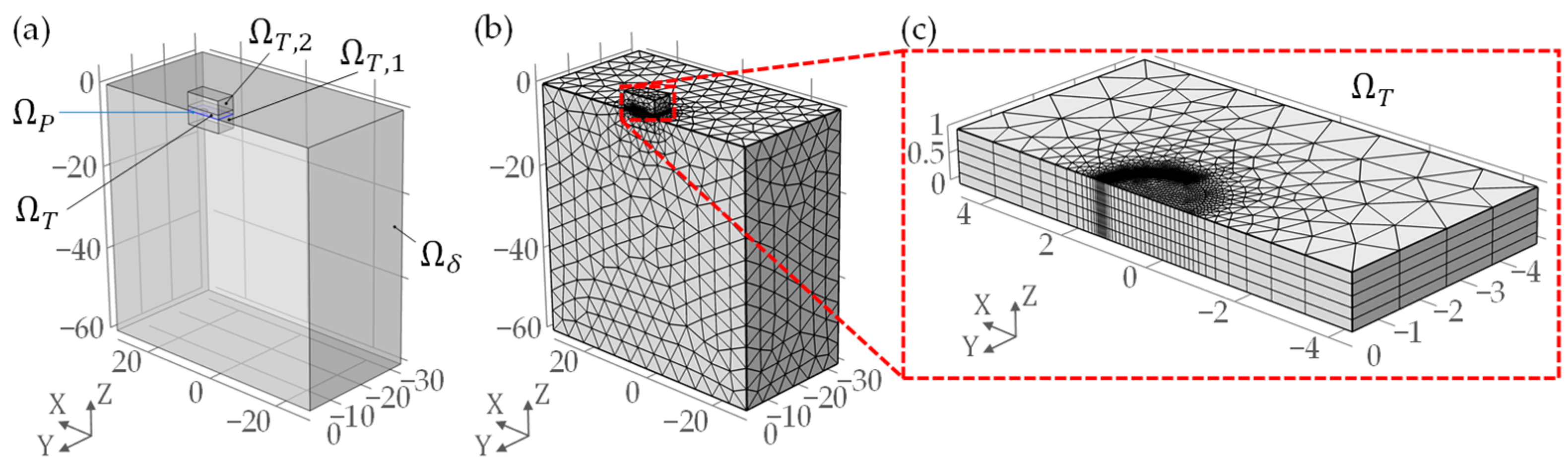
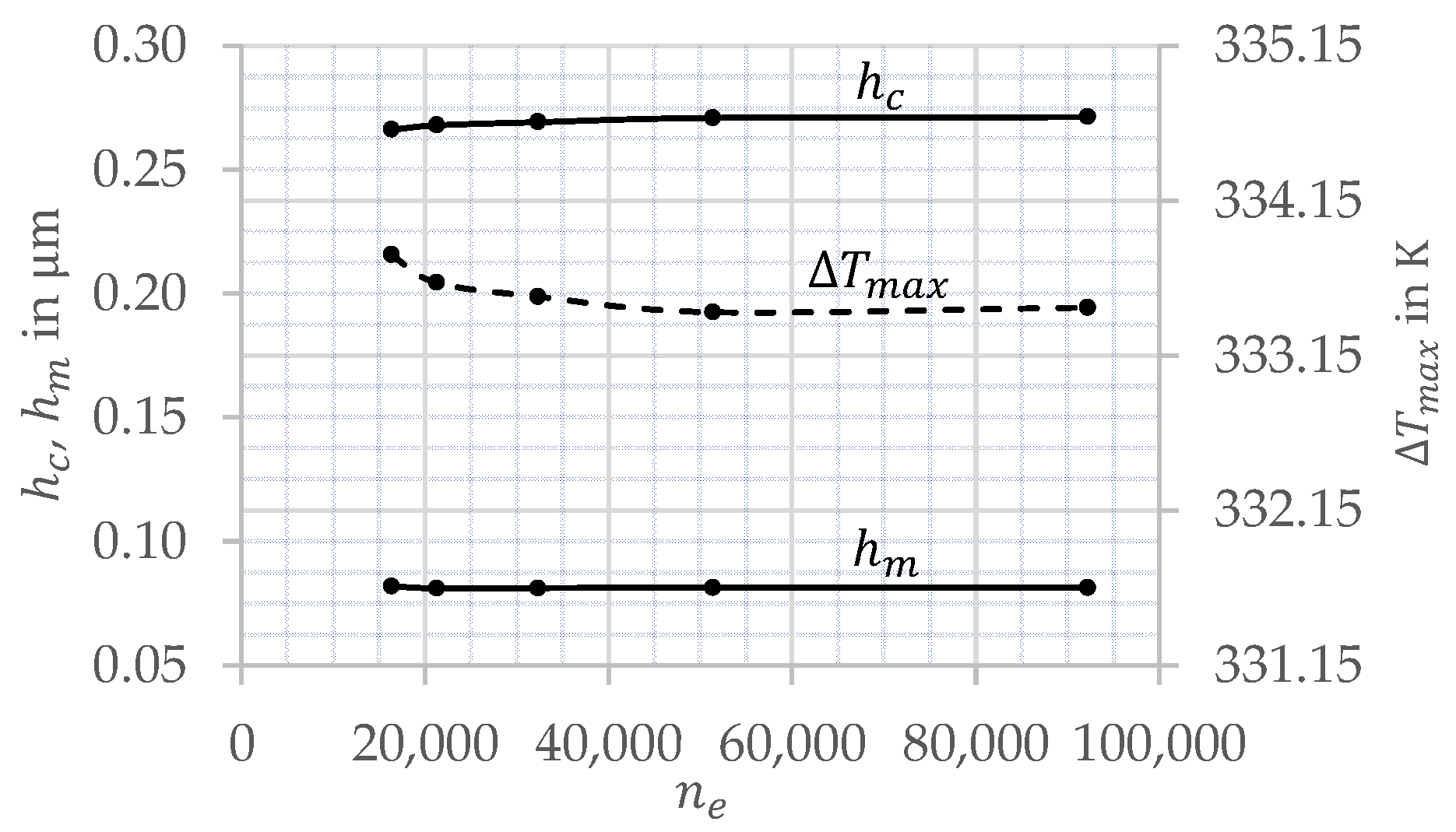
2.2.2. Computational Domain and Meshing
3. Results and Discussion
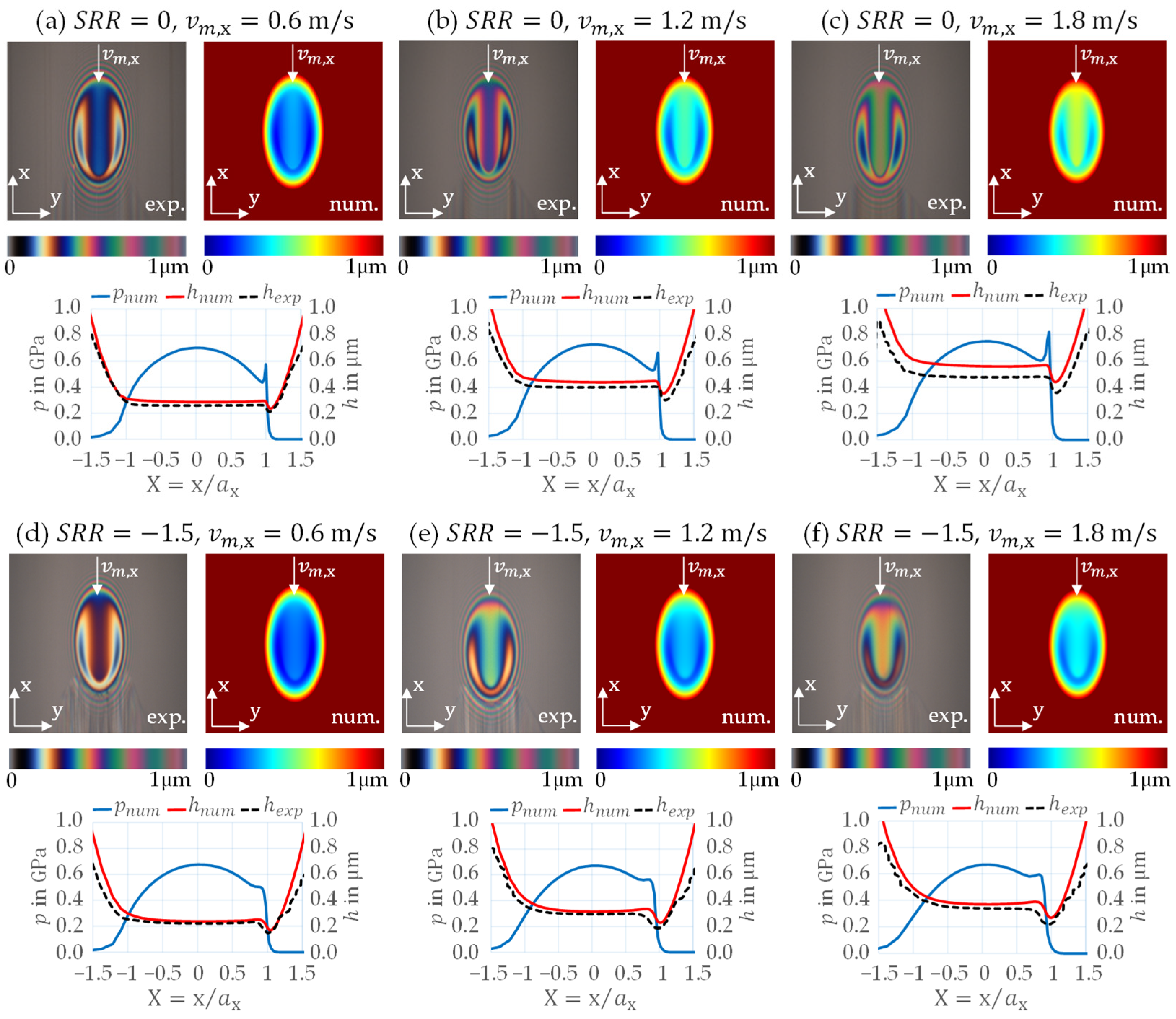
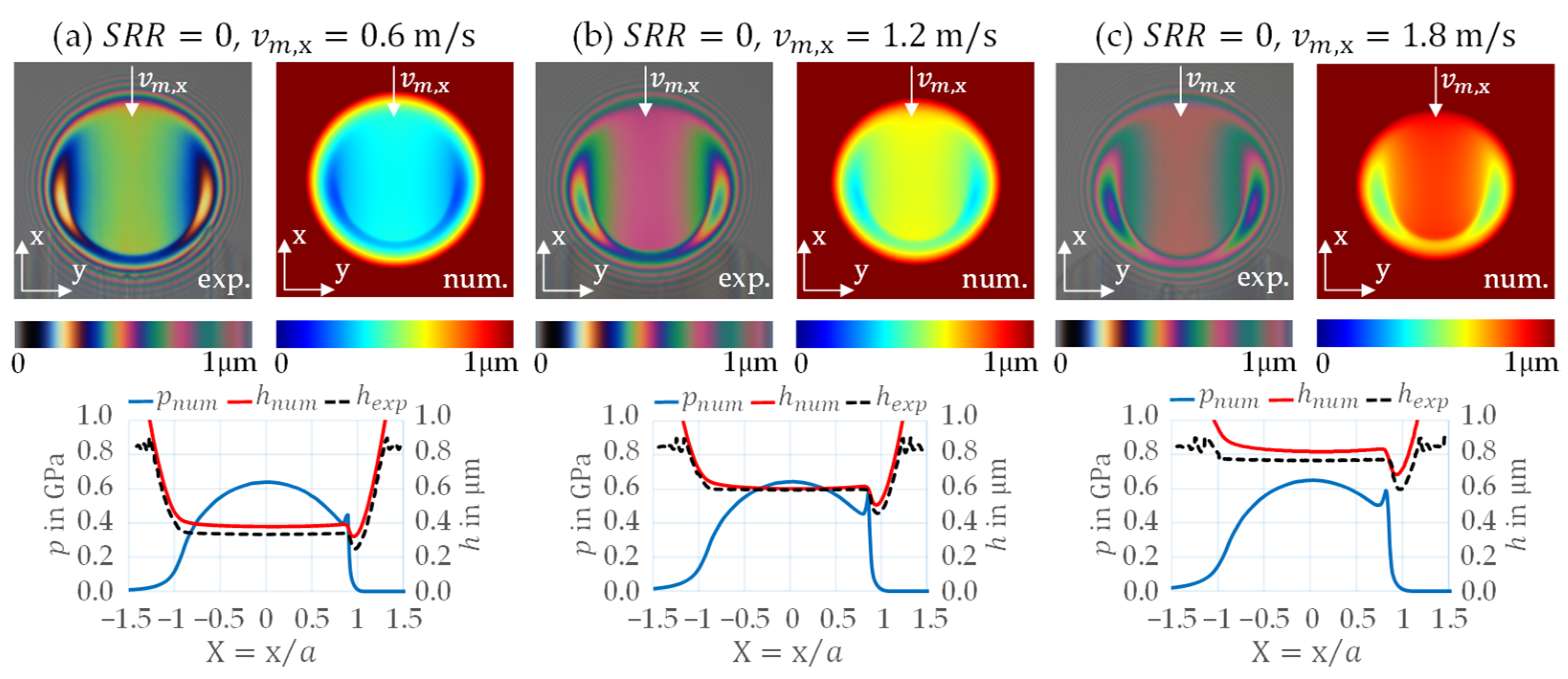
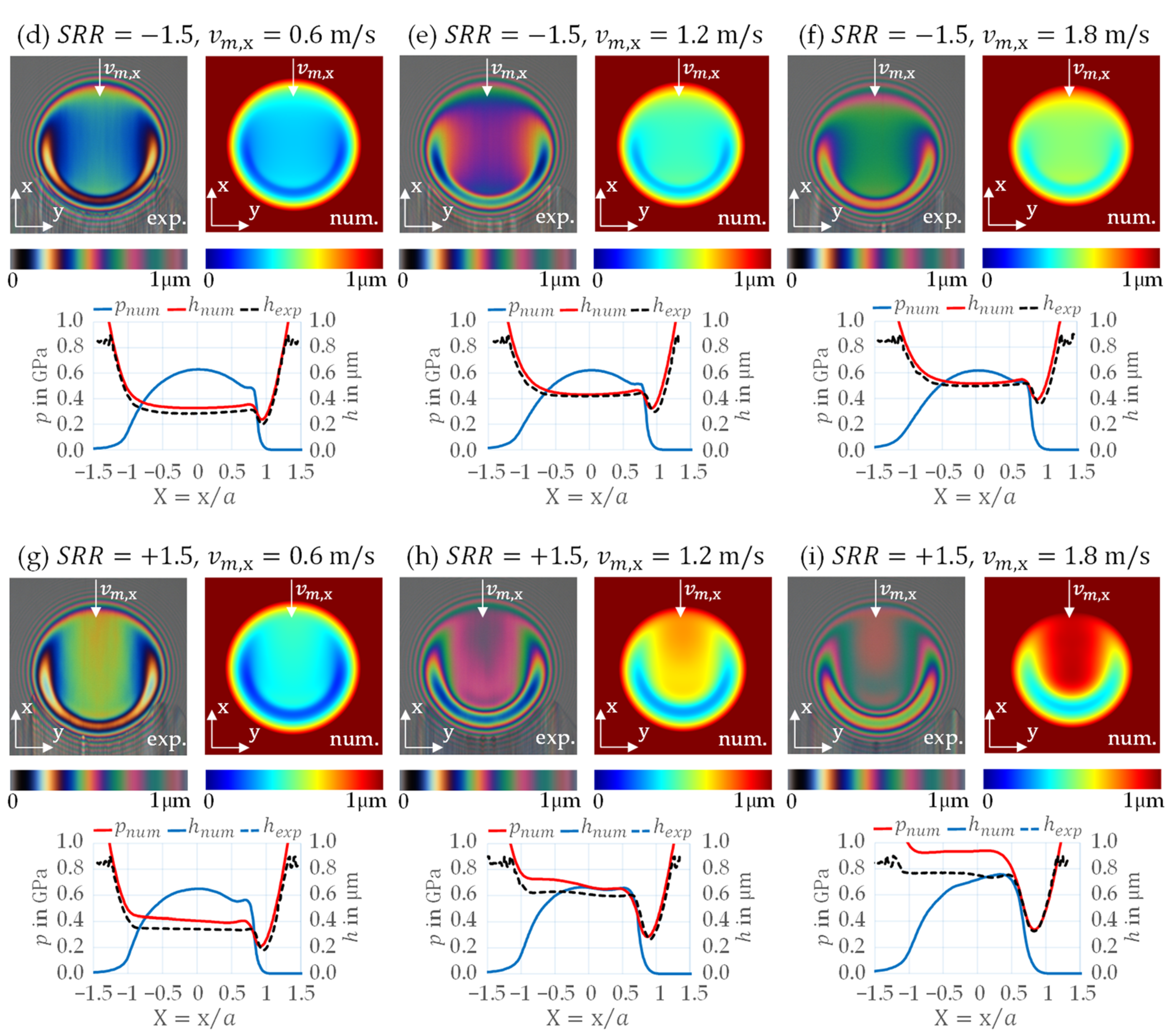
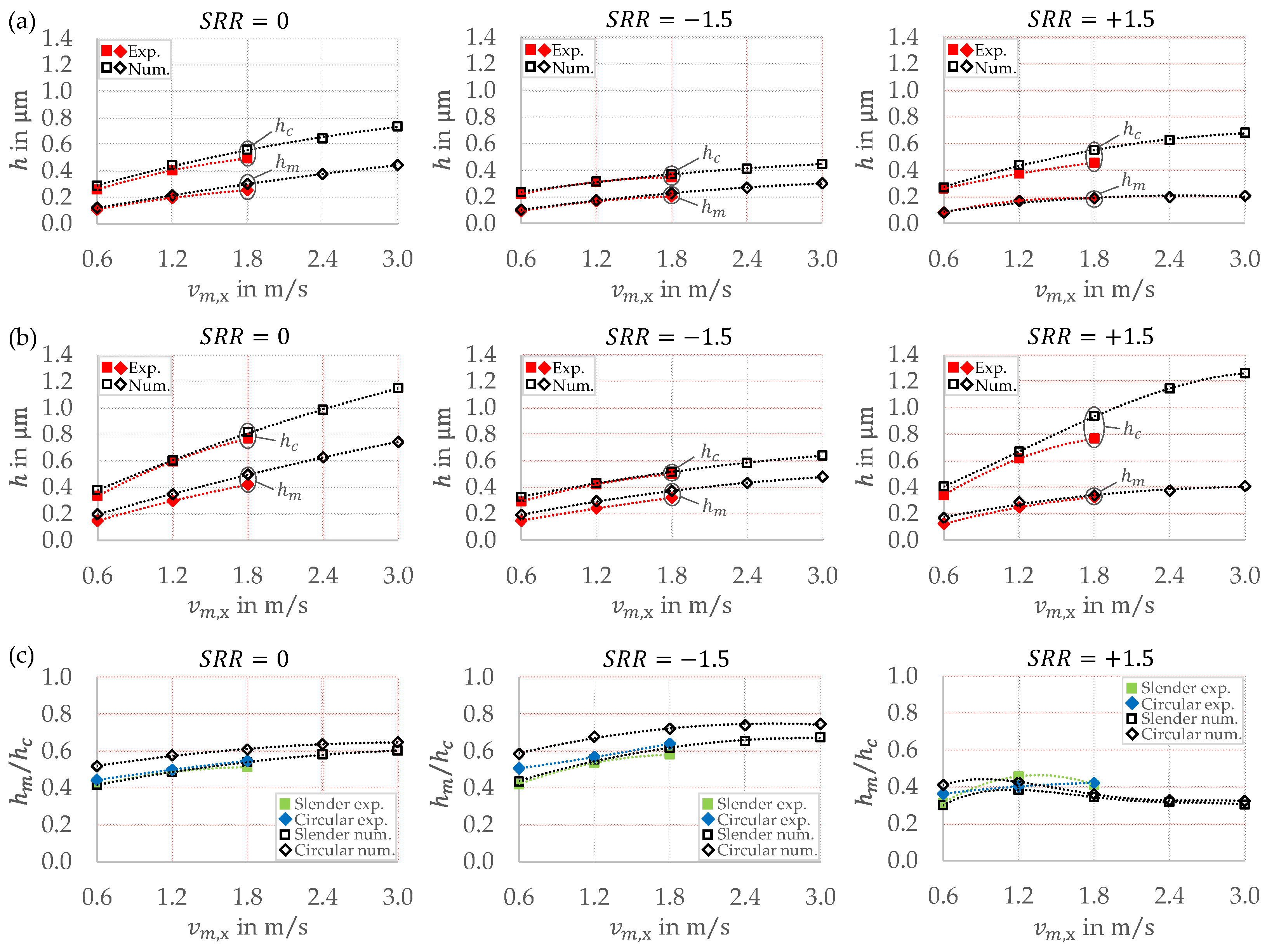
3.1. Film Thickness
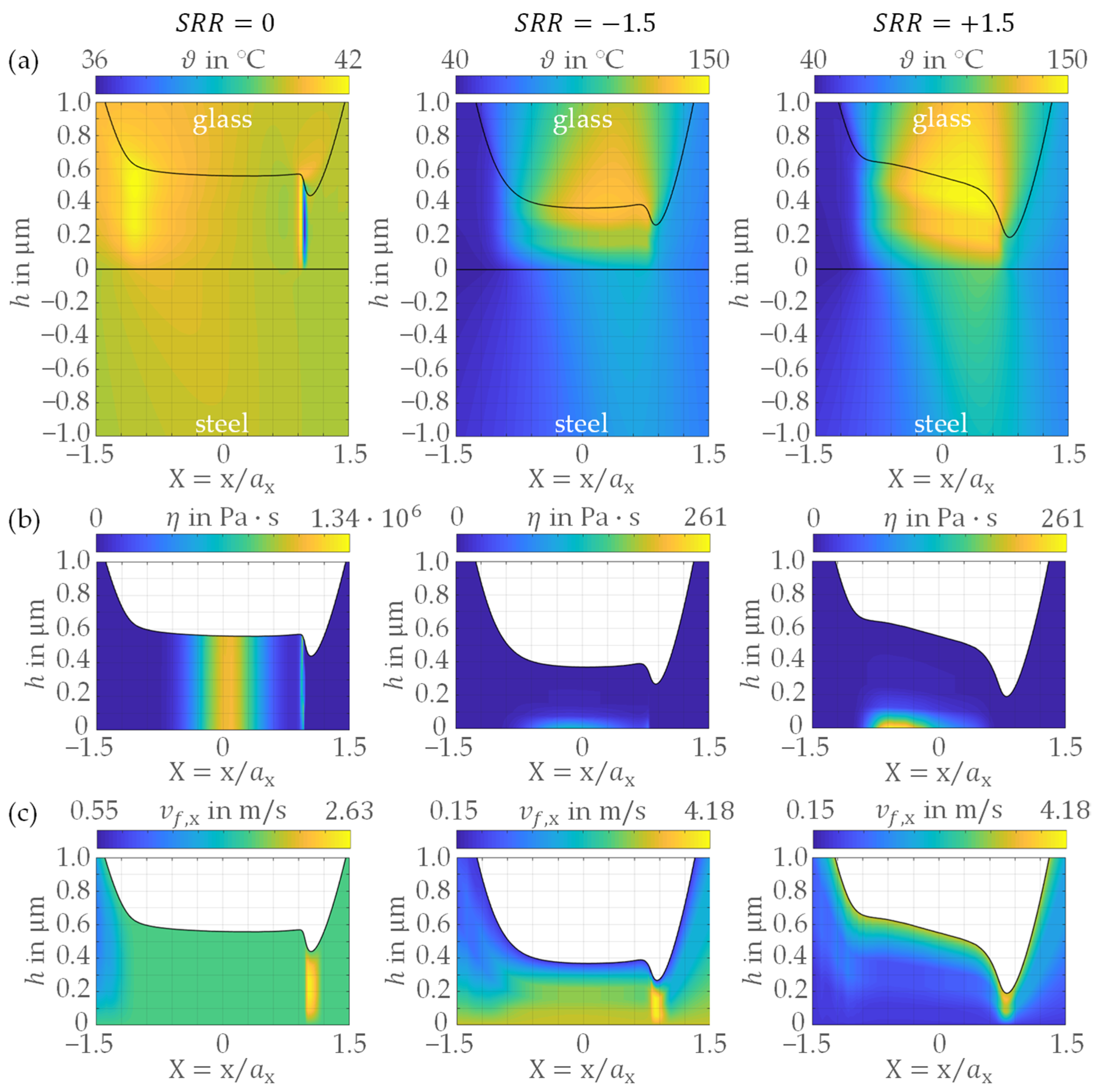
3.2. Temperature, Viscosity and Velocity
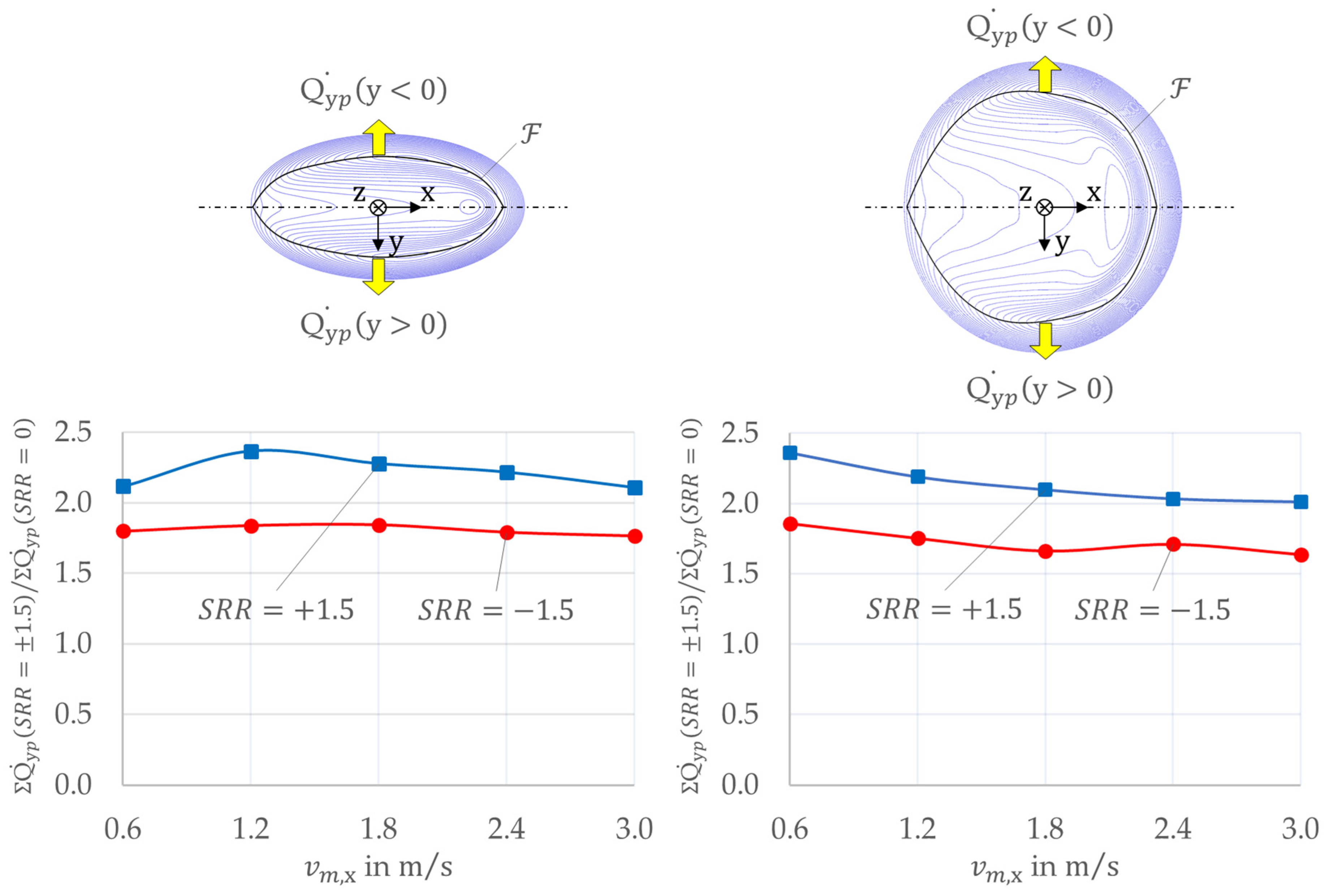
3.3. Side Flow
4. Conclusions
- The film thickness is lower for slender EHL contacts than for circular ones, considering the same Hertzian pressure.
- The different thermal effusivities of glass and steel result in a viscosity wedge, which is particularly pronounced at high positive sliding with the glass disk moving faster.
- A strong viscosity wedge diverts the oil flow to the contact sides and limits the amount of oil maintaining the oil film in the central region.
- At high positive sliding, a continuous decrease in film thickness is observed in the gap length direction of the slender EHL contact.
- At high positive sliding, the influence of entrainment speed on minimum film thickness is almost negligible, especially for slender contacts.
- To support EHL film formation in slender EHL contacts at higher sliding, the solid body made of the material with higher thermal effusivity has to move faster.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Latin symbols | ||
| Coefficients of the lubricant heat capacity model | ||
| Coefficients of the lubricant Vogel temperature model | ||
| Hertzian half-width, circular contact | ||
| Semi-major Hertzian contact length, slender contact | ||
| Semi-minor Hertzian contact length, slender contact | ||
| Compliance matrix | ||
| Specific heat capacity | ||
| Coefficients of the lubricant Bode density model | ||
| Thermal effusivity | ||
| Pressure coefficients of the lubricant thermal conductivity model | ||
| Young’s Modulus | ||
| Normal force | ||
| Film thickness | ||
| Central film thickness | ||
| Minimum film thickness | ||
| Dimensionless film thickness | ||
| Dimensionless constant parameter of the film thickness equation | ||
| Ellipticity ratio | ||
| Number of mesh elements in domain | ||
| Number of mesh layers in gap height direction in domain | ||
| Number of mesh elements in domain | ||
| Number of mesh elements in domain | ||
| Number of mesh elements in domain | ||
| Number of mesh elements in domain | ||
| Total number of mesh elements | ||
| Hydrodynamic pressure | ||
| Dimensionless hydrodynamic pressure | ||
| Hertzian pressure | ||
| Mass flow rate crossing the frontier in y-direction | ||
| Coefficient of the Roelands’ equation | ||
| Peclet number for the energy equation | ||
| Radii of curvature in x- and y-direction | ||
| Slide-to-roll ratio | ||
| Temperature | ||
| Maximum temperature | ||
| Bulk temperature | ||
| Displacement vector | ||
| Sliding speed in x-direction. | ||
| Entrainment speed in x-direction | ||
| Sum speed in x-direction | ||
| Speed of the counter steel body | ||
| Speed of the glass disk | ||
| Coordinates | ||
| Dimensionless coordinates | ||
| Greek symbols | ||
| Pressure viscosity coefficient | ||
| Coefficient of the lubricant Bode density model | ||
| Deformation of the equivalent body | ||
| Dimensionless deformation of the equivalent body | ||
| Strain tensor | ||
| Shear rate in x-direction | ||
| Temperature | ||
| Oil temperature | ||
| Dynamic viscosity | ||
| Dimensionless dynamic viscosity | ||
| Dynamic viscosity of the lubricant at and atmospheric pressure | ||
| Thermal conductivity | ||
| Thermal conductivity of the lubricant at and atmospheric pressure | ||
| Poisson’s ratio | ||
| Density | ||
| Dimensionless density | ||
| Fluid density at and atmospheric pressure | ||
| Coefficient of the lubricant Bode density model | ||
| Stress tensor of the equivalent body | ||
| Total mass flow rate crossing the frontier in y-direction | ||
| Shear stress | ||
| Eyring shear stress | ||
| Dimensionless shear stress components in the x- and y-directions over the domain | ||
| Special symbols | ||
| Frontier used for the side flow analysis | ||
| Indices | ||
| Lower solid body (counter steel body) | ||
| Upper solid body (glass disk) | ||
| Fluid |
References
- Sharif, K.J.; Kong, S.; Evans, H.P.; Snidle, R.W. Contact and elastohydrodynamic analysis of worm gears Part 2: Results. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2001, 215, 831–846. [Google Scholar] [CrossRef] [Green Version]
- Venner, C.H.; Lubrecht, A. Revisiting film thickness in slender elastohydrodynamically lubricated contacts. Proc. Inst. Mech. Eng. Part C 2010, 224, 2549–2558. [Google Scholar] [CrossRef]
- Wolf, M.; Solovyev, S.; Fatemi, A. Film thickness in elastohydrodynamically lubricated slender elliptic contacts: Part I—Numerical studies of central film thickness. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2022, 236, 1043–1055. [Google Scholar] [CrossRef]
- Mostofi, A.; Gohar, R. Oil Film Thickness and Pressure Distribution in Elastohydrodynamic Point Contacts. J. Mech. Eng. Sci. 1982, 24, 173–182. [Google Scholar] [CrossRef]
- Evans, H.P.; Snidle, R.W. Analysis of Elastohydrodynamic Lubrication of Elliptical Contacts with Rolling along the Major Axis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1983, 197, 209–211. [Google Scholar] [CrossRef]
- Gohar, R.; Cameron, A. Optical Measurement of Oil Film Thickness under Elasto-hydrodynamic Lubrication. Nature 1963, 200, 458–459. [Google Scholar] [CrossRef]
- Thorp, N.; Gohar, R. Oil Film Thickness and Shape for a Ball Sliding in a Grooved Raceway. J. Lubr. Technol. 1972, 94, 199–208. [Google Scholar] [CrossRef]
- Chittenden, R.J.; Dowson, D.; Dunn, J.F.; Taylor, C.M. A theoretical analysis of the isothermal elastohydrodynamic lubrication of concentrated contacts. I. Direction of lubricant entrainment coincident with the major axis of the Hertzian contact ellipse. Proc. R. Soc. London 1985, 397, 245–269. [Google Scholar] [CrossRef]
- Wheeler, J.; Vergne, P.; Fillot, N.; Philippon, D. On the relevance of analytical film thickness EHD equations for isothermal point contacts: Qualitative or quantitative predictions? Friction 2016, 4, 369–379. [Google Scholar] [CrossRef] [Green Version]
- Marian, M.; Bartz, M.; Wartzack, S.; Rosenkranz, A. Non-Dimensional Groups, Film Thickness Equations and Correction Factors for Elastohydrodynamic Lubrication: A Review. Lubricants 2020, 8, 95. [Google Scholar] [CrossRef]
- Wheeler, J.D.; Fillot, N.; Vergne, P.; Philippon, D.; Morales-Espejel, G. On the crucial role of ellipticity on elastohydrodynamic film thickness and friction. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2016, 230, 1503–1515. [Google Scholar] [CrossRef]
- Wolf, M.; Sperka, P.; Fryza, J.; Fatemi, A. Film Thickness in Elastohydrodynamically Lubricated Slender Elliptic Contacts: Part II—Experimental Validation and Minimum Film Thickness. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2022. [Google Scholar] [CrossRef]
- Kaneta, M.; Nishikawa, H. Formation of dimples in elliptical EHL contacts. In Thinning Films and Tribological Interfaces, Proceedings of the 26th Leeds-Lyon Symposium on Tribology, Leeds, UK, 14–17 September 1999; Dowson, D., Priest, M., Taylor, C.M., Ehret, P., Childs, T.H.C., Dalmaz, G., Lubrecht, A., Berthier, Y., Flamand, L., Georges, J.M., Eds.; Elsevier Science B. V.: Amsterdam, The Netherlands, 2000; pp. 599–607. [Google Scholar] [CrossRef]
- Kaneta, M.; Kawashima, R.; Masuda, S.; Nishikawa, H.; Yang, P.; Wang, J. Thermal Effects on the Film Thickness in Elliptic EHL Contacts with Entrainment Along the Major Contact Axis. ASME J. Tribol. 2001, 124, 420–427. [Google Scholar] [CrossRef]
- Kaneta, M.; Yang, P. Effects of the thermal conductivity of contact materials on elastohydrodynamic lubrication characteristics. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 224, 2577–2587. [Google Scholar] [CrossRef]
- Yilmaz, M.; Mirza, M.; Lohner, T.; Stahl, K. Superlubricity in EHL Contacts with Water-Containing Gear Fluids. Lubricants 2019, 7, 46. [Google Scholar] [CrossRef]
- Hartl, M.; Křupka, I.; Liška, M. Differential colorimetry: Tool for evaluation of chromatic interference patterns. Opt. Eng. 1997, 36, 2384–2391. [Google Scholar] [CrossRef]
- Molimard, J.; Querry, M.; Vergne, P.; Krupka, I.; Hartl, M.; Poliscuk, R.; Liska, M. Differential Colorimetry: A tool for the analysis of fluid film lubrication. Mec. Ind. 2002, 3, 571–581. [Google Scholar] [CrossRef]
- Ziegltrum, A.; Lohner, T.; Stahl, K. TEHL Simulation on the Influence of Lubricants on the Frictional Losses of DLC Coated Gears. Lubricants 2018, 6, 17. [Google Scholar] [CrossRef] [Green Version]
- Habchi, W.; Bair, S. The role of the thermal conductivity of steel in quantitative elastohydrodynamic friction. Tribol. Int. 2019, 142, 105970. [Google Scholar] [CrossRef]
- Habchi, W. Finite Element Modeling of Elastohydrodynamic Lubrication Problems; John Wiley & Sons Incorporated: Newark, NJ, USA, 2018. [Google Scholar]
- Nijenbanning, G.; Venner, C.H.; Moes, H. Film thickness in elastohydrodynamically lubricated elliptic contacts. Wear 1994, 176, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Vogel, H. Principle of temperature dependency of viscosity of fluids. Z. Phys. 1921, 22, 645–647. [Google Scholar]
- Fulcher, G.S. Analysis of Recent Measurements of the Viscosity of Glasses II. J. Am. Ceram. Soc. 1925, 8, 789–794. [Google Scholar] [CrossRef]
- Tammann, G.; Hesse, W. Die Abhängigkeit der Viskosität von der Temperatur bei unterkühlten Flüssigkeiten [Temperature dependency of viscosity of undercooled liquids]. Z. Für Anorg. Und Allg. Chem. 1926, 156, 245–247. [Google Scholar] [CrossRef]
- Roelands, C.J.A. Correlation Aspects of the Viscosity-Temperature Relationship of Lubricating Oil. Ph.D. Thesis, Technische Hogeschool Delft, Delft, The Netherlands, 1966. [Google Scholar]
- Eyring, H. Viscosity, Plasticity, and Diffusion as Examples of Absolute Reaction Rates. J. Chem. Phys. 1936, 4, 283–291. [Google Scholar] [CrossRef]
- Bode, B. Modell zur Beschreibung des Fließverhaltens von Flüssigkeiten unter hohem Druck [Model for describing the rheological behaviour of liquids under high pressure]. Tribol. Schmier. 1989, 36, 182–189. [Google Scholar]
- Larsson, E.; Andersson, O. Lubricant thermal conductivity and heat capacity under high pressure. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2000, 214, 337–342. [Google Scholar] [CrossRef]
- Ziegltrum, A.; Maier, E.; Lohner, T.; Stahl, K.A. Numerical Study on Thermal Elastohydrodynamic Lubrication of Coated Polymers. Tribol. Lett. 2020, 68, 71. [Google Scholar] [CrossRef]
- Omasta, M.; Adam, J.; Sperka, P.; Krupka, I.; Hartl, M. On the Temperature and Lubricant Film Thickness Distribution in EHL Contacts with Arbitrary Entrainment. LubricanIts 2018, 6, 101. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slender Contact | Circular Contact | ||
|---|---|---|---|
| Steel | Glass | ||
|---|---|---|---|
| [20] | 1.1 | ||
| Mesh Case | |||||||
|---|---|---|---|---|---|---|---|
| Extra coarse | 1301 | 3 | 3903 | 671 | 5891 | 5826 | 16,291 |
| Coarse | 1521 | 3 | 4563 | 2489 | 7143 | 7028 | 21,233 |
| Normal | 1866 | 4 | 7464 | 7289 | 8734 | 8792 | 32,279 |
| Fine | 2658 | 5 | 13,290 | 13,385 | 12,345 | 12,336 | 51,356 |
| Extra fine | 2658 | 10 | 26,580 | 40,958 | 12,345 | 12,336 | 92,219 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tošić, M.; Larsson, R.; Lohner, T. Thermal Effects in Slender EHL Contacts. Lubricants 2022, 10, 89. https://doi.org/10.3390/lubricants10050089
Tošić M, Larsson R, Lohner T. Thermal Effects in Slender EHL Contacts. Lubricants. 2022; 10(5):89. https://doi.org/10.3390/lubricants10050089
Chicago/Turabian StyleTošić, Marko, Roland Larsson, and Thomas Lohner. 2022. "Thermal Effects in Slender EHL Contacts" Lubricants 10, no. 5: 89. https://doi.org/10.3390/lubricants10050089
APA StyleTošić, M., Larsson, R., & Lohner, T. (2022). Thermal Effects in Slender EHL Contacts. Lubricants, 10(5), 89. https://doi.org/10.3390/lubricants10050089