Pitting Influence on Electrical Capacitance in EHL Rolling Contacts


Abstract
:1. Introduction
1.1. Analytical and Numerical Models
1.2. Scope and Assumptions
1.3. Experimental Findings
2. Materials and Methods
2.1. Fluid Domain
2.2. Solid Domain
2.3. Electrostatic Domain
3. Implementation
3.1. Numerical Setup
3.2. Reference and Modified Case
3.3. Boundary Conditions
4. Results
5. Discussion
6. Conclusions
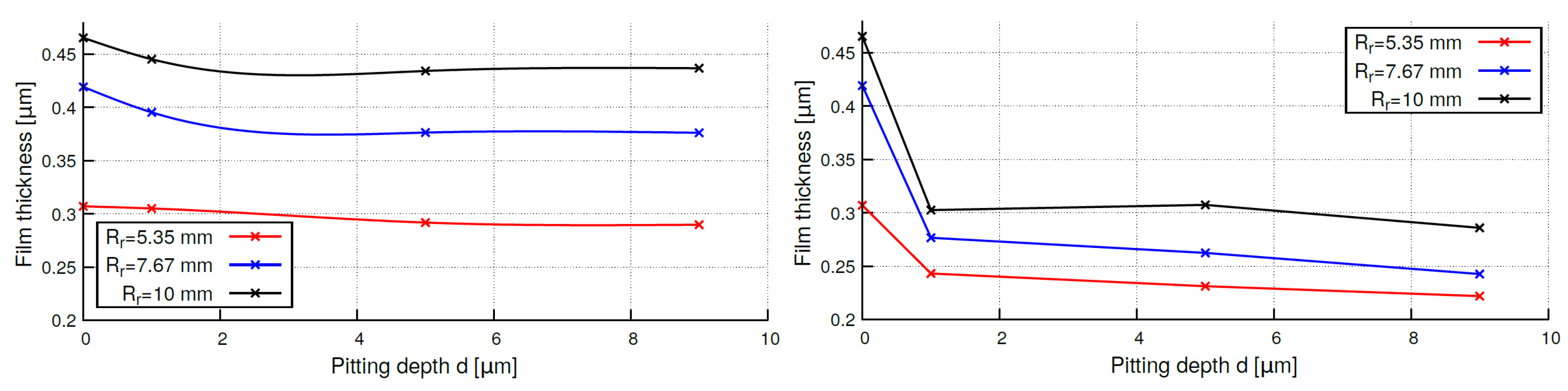
- As is known from empirical studies [18,19], the geometry of the contact partners also affects the lubricant film thickness. A smaller, reduced radius has a shorter contact length, a higher maximum pressure, and a lower lubricant film thickness. However, if the effects of pitting are compared in terms of the electrical capacitance of the individual EHL contacts, the behavior is approximately the same, see Figure 13. From the knowledge of the geometry of the rolling bearing used, the severity of the surface damage can thus be approximately concluded.
- In the investigated parameter set, it was thus possible to determine that with geometrically identical pittings, the change in capacity lies in a similar range of up to 35% for all reduced radii. Maximum deviations are around 5% and would therefore hardly be distinguishable with corresponding real measurements.
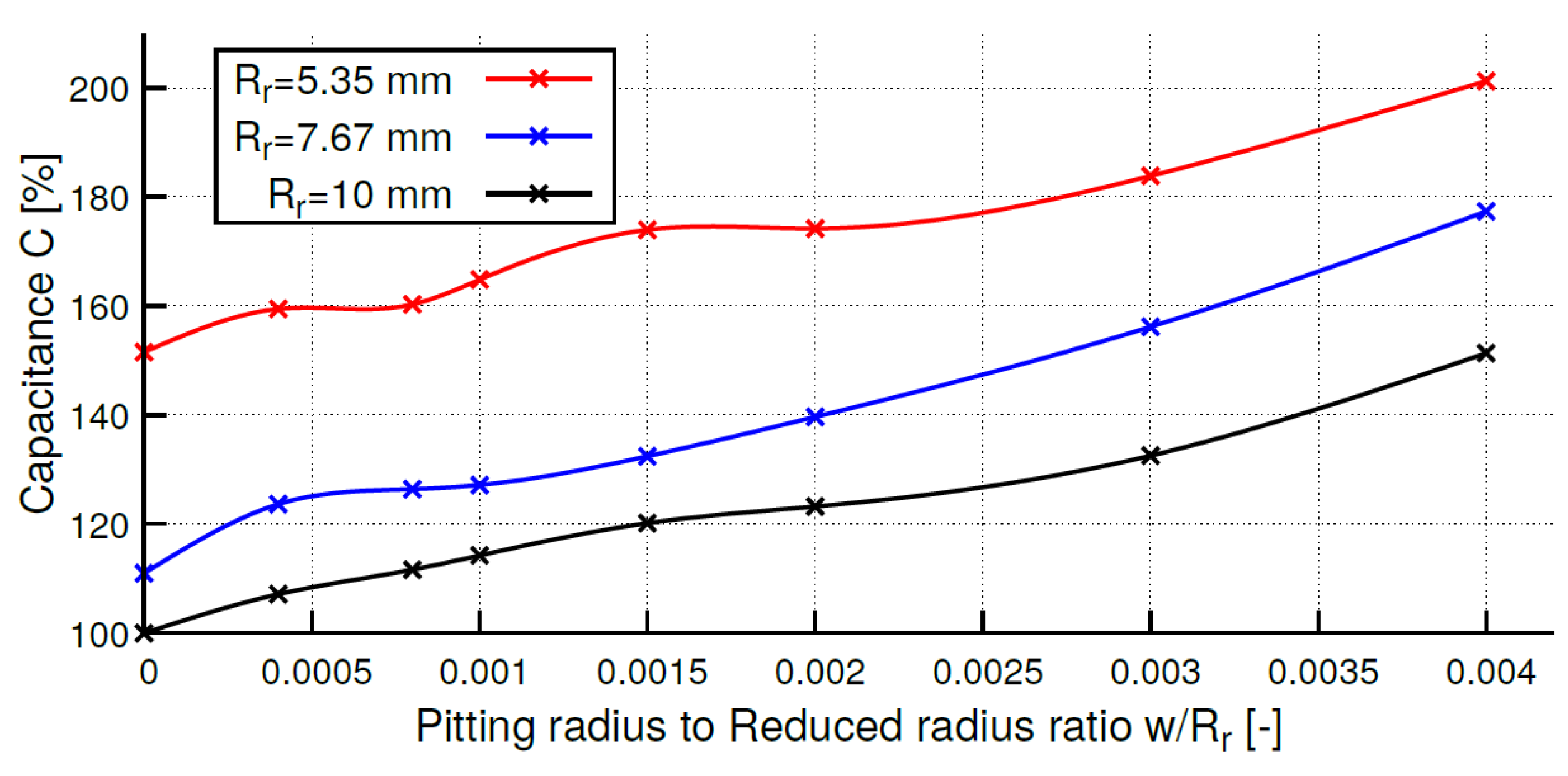
- However, when looking at the same data for the same ratio of pitting width to reduced radius, differences of up to 50% can be seen. This becomes relevant under the aspect that, due to Hertzian theory, the pitting size depends on the contact width. Those deviations would be detectable.
- Still, as shown in Figure 13 and Figure 14, the relative change in the electrical capacitance of the medium reduced radius is similar or up to 10% greater than that of the largest reduced radius. It can be seen that the electrical capacitance of an EHL contact changes similarly for geometrically identical pitting geometries. This behavior is attributed to the interaction between the rolling elements radius and the fluid flow, as investigated in a different manner by Marian [12], but a distinctive relationship is still to be developed.
- It can be stated that regularity can be seen in the behavior of the electric capacitor model, once certain pitting geometries are investigated. As a next step, the model at hand needs to be enhanced into a three-dimensional model, phase transition needs to be implemented, and the pitting geometries need to be investigated experimentally.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| AC | Alternating current |
| CFD | Computational fluid dynamics |
| EHL | Elastohydrodynamic lubrication |
| EOS | Equation of state |
| FST | Fluid–structure–interaction |
References
- DIN EN ISO 16281:2008-06; Rolling Bearings—Methods for Calculating the Modified Reference Rating Life for Universally Loaded Bearings. ISO: Geneva, Switzerland, 2008.
- Lundberg, G.; Palmgren, A. Dynamic Capacity of Rolling Bearings. J. Appl. Mech. 1949, 16, 165–172. [Google Scholar] [CrossRef]
- Halme, J.; Andersson, P. Rolling contact fatigue and wear fundamentals for rolling bearing diagnostics—State of the art. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2010, 224, 377–393. [Google Scholar] [CrossRef]
- Willwerth, A.; Roman, M. Electrical bearing damage—A lurking problem in inverter-driven traction motors. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo (ITEC), Metro Detroit, MI, USA, 16–19 June 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Lin, F.; Chau, K.T.; Chan, C.C.; Liu, C. Fault Diagnosis of Power Components in Electric Vehicles. J. Asian Electr. Veh. 2013, 11, 1659–1666. [Google Scholar] [CrossRef]
- Wittek, E.; Kriese, M.; Tischmacher, H.; Gattermann, S.; Ponick, B.; Poll, G. Capacitances and lubricant film thicknesses of motor bearings under different operating conditions. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Mütze, A. Bearing Currents in Inverter Fed AC Motors; Berichte aus der Elektrotechnik; Shaker: Aachen, Germany, 2004; ISBN 3-8322-2528-5. [Google Scholar]
- Gemeinder, Y.; Schuster, M.; Radnai, B.; Sauer, B.; Binder, A. Calculation and validation of a bearing impedance model for ball bearings and the influence on EDM-currents. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1804–1810. [Google Scholar] [CrossRef]
- Martin, G.; Becker, F.; Kirchner, E. A novel method for diagnosing rolling bearing surface damage by electric impedance analysis. Tribol. Int. 2022, 170, 107503. [Google Scholar] [CrossRef]
- Maruyama, T.; Radzi, F.; Sato, T.; Iwase, S.; Maeda, M.; Nakano, K. Lubrication Condition Monitoring in EHD Line Contacts of Thrust Needle Roller Bearing Using the Electrical Impedance Method. Lubricants 2023, 11, 223. [Google Scholar] [CrossRef]
- De la Guerra Ochoa, E.; Otero, J.; Tanarro, E.C.; Morgado, P.; Lantanda, A.; Munoz-Guijosa, J.; Sanz, J. Optimising lubricated friction coefficient by surface texturing. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 2610–2619. [Google Scholar] [CrossRef]
- Marian, M.; Grützmacher, P.; Rosenkranz, A.; Tremmel, S.; Mücklich, F.; Wartzack, S. Designing surface textures for EHL point-contacts—Transient 3D simulations, meta-modeling and experimental validation. Tribol. Int. 2019, 137, 152–163. [Google Scholar] [CrossRef]
- Marian, M. Numerical Design of Surface Micro-Textures for Lubricated Tribological Contacts; FAU University Press: Erlangen, Germany, 2021. [Google Scholar] [CrossRef]
- Gropper, D.; Wang, L.; Harvey, T. Hydrodynamic lubrication of textured surfaces: A review of modeling techniques and key findings. Tribol. Int. 2016, 94, 509–529. [Google Scholar] [CrossRef]
- Prashad, H. Theoretical evaluation of Impedance, Capacitance and Charge Accumulation on Roller Bearings Operated under Electrical Fields. Wear 1988, 125, 223–239. [Google Scholar] [CrossRef]
- Puchtler, S.; Schirra, T.; Kirchner, E.; Späck-Leigsnering, Y.; De Gersem, H. Capacitance calculation of unloaded rolling elements—Comparison of analytical and numerical methods. Tribol. Int. 2022, 176, 107882. [Google Scholar] [CrossRef]
- Schneider, V.; Liu, H.; Bader, N.; Furtmann, A.; Poll, G. Empirical formulae for the influence of real film thickness distribution on the capacitance of an EHL point contact and application to rolling bearings. Tribol. Int. 2021, 154. [Google Scholar] [CrossRef]
- Dowson, D.; Higginson, G.; Whitaker, A.V. Elastohydrodynamic lubrication: A survey of isothermal solutions. J. Mech. Eng. Sci. 1962, 4, 121–126. [Google Scholar] [CrossRef]
- Hamrock, B.; Dowson, D. Isothermal Elastohydrodynamic Lubrication of Point Contacts. Part III —Fully Flooded Results. J. Lubr. Technol. 1977, 99, 264–279. [Google Scholar] [CrossRef]
- Almqvist, T.; Larsson, R. The Navier-Stokes approach for thermal EHL line contact solutions. Tribol. Int. 2002, 35, 163–170. [Google Scholar] [CrossRef]
- Neu, M.; Zaiat, A.; Harder, A.; Kirchner, E.; Hussong, J. Multi-Physics modeling of roller bearing raceway imperfections compared to electric measurements of an EHL point contact. Tribol. Int. 2022, 173. [Google Scholar] [CrossRef]
- Singh, K.; Sadeghi, F.; Peterson, W.; Lorenz, S.; Villarreal, J.; Jinmon, T. A CFD-FEM based partitioned fluid structure interaction model to investigate surface cracks in elastohydrodynamic lubricated line contacts. Tribol. Int. 2022, 171, 107532. [Google Scholar] [CrossRef]
- Peklenik, J. Grundlagen zur korrelationstheorie technischer Oberflächen. Ind. Anz. 1965, 87, 54–60. [Google Scholar]
- Neu, M.; Wenzel, J.; Kirchner, E. Efficient methods for elastohydrodynamic simulations of ball bearing contacts. In Proceedings of the 61. Tribologie-Fachtagung 2020, Online, 28–30 September 2020. [Google Scholar]
- Schneider, V.; Bader, N.; Liu, H.; Poll, G. Method for In Situ Film Thickness Measurement of Ball Bearings under Combined Loading using Capacitance Measurements. Tribol. Int. 2022, 171. [Google Scholar] [CrossRef]
- Becker-Dombrowsky, F.; Koplin, Q.; Kirchner, E. Individual Feature Selection of Rolling Bearing Impedance Signals for Early Failure Detection. Lubricants 2023, 11, 304. [Google Scholar] [CrossRef]
- Schneider, V.; Behrendt, C.; Höltje, P.; Cornel, D.; Becker-Dombrowsky, F.; Puchtler, S.; Gutiérrez Guzmán, F.; Ponick, B.; Jacobs, G.; Kirchner, E. Electrical bearing damage, a problem in the nano-and macro-range. Lubricants 2022, 10, 194. [Google Scholar] [CrossRef]
- Dowson, D.; Toyoda, S. A Central Film Thickness Formula for Elastohydrodynamic Line Contacts. In Proceedings of the Fifth Leeds-Lyon Symposium on Tribology, Leeds, UK, 19–22 September 1978; pp. 60–64. [Google Scholar] [CrossRef]
- Hartinger, M.; Dumont, M.; Ioannides, S.; Gosman, D.; Spikes, H. CFD Modelling of a Thermal and Shear-Thinning Elastohydrodynamic Line Contact. ASME J. Tribol. 2008, 130, 307–323. [Google Scholar] [CrossRef]
- Hajishafiee, A.; Kadiric, A.; Ioannides, S.; Dini, D. A coupled finite-volume CFD solver for two-dimensional elasto-hydrodynamic lubrication problems with particular application to rolling element bearings. Tribol. Int. 2017, 109, 258–273. [Google Scholar] [CrossRef]
- Bird, R.B.; Stewart, W.; Lightfoot, E. Transport Phenomena; Wiley: New York, NY, USA, 2007; ISBN 978-0-470-11539-8. [Google Scholar]
- Bair, S. High Pressure Rheology for Quantitative Elastohydrodynamics; Tribology and Interface Engineering Series No. 54; Elsevier: Amsterdam, The Netherlands, 2007; pp. 1–240. ISBN 978-0-444-52243-6. [Google Scholar]
- Fakhreddine, Y.; Zoller, P. The Equation of State of a Polydimethylsiloxane Fluid. J. Appl. Polym. Sci. 1990, 41, 1087–1093. [Google Scholar] [CrossRef]
- Doolittle, A. Studies in Newtonian Flow. I. The Dependence of the Viscosity of Liquids on Temperature. J. Appl. Polym. Sci. 1951, 22, 1031–1035. [Google Scholar] [CrossRef]
- Doolittle, A. Studies in Newtonian Flow. II. The Dependence of the Viscosity of Liquids on Free-Space. J. Appl. Polym. Sci. 1951, 22, 1471–1475. [Google Scholar] [CrossRef]
- Popov, V. Contact Mechanics and Friction: Physical Principles and Application; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 978-3-642-10803-7. [Google Scholar]
- Almqvist, T.; Almqvist, A.; Larsson, R. A comparison between computational fluid dynamic and Reynolds approaches for simulating transient EHL line contacts. Tribol. Int. 2004, 37, 61–69. [Google Scholar] [CrossRef]
- Hamrock, B.; Dowson, D. Isothermal Elastohydrodynamic Lubrication of Point Contacts: Part IV—Starvation Results. J. Lubr. Tech. 1976, 99, 15–23. [Google Scholar] [CrossRef]
- Srirattayawong, S. A computational fluid dynamics study of elastohydrodynamic lubrication line contact problem with consideration of surface roughness. Comput. Therm. Sci. 2013, 5, 195–213. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [mm] | d [µm] | w [mm] |
|---|---|---|
| 5.35 | ||
| 7.67 | ||
| 10 | ||
| Parameter | Variable | Value |
|---|---|---|
| Lubricant temperature | T | 333 |
| Electric potential | 2.5 | |
| Surface velocity | 2.5 | |
| Youngs modulus | 2.1 × | |
| Relative permittivity | 2.10 | |
| Oil Density (At 288 K) | 878 |
| Parameter | Variable | Value |
|---|---|---|
| Doolittle parameter | B | 3.520 |
| 0.6980 | ||
| Thermal expansion of occupied volume | ||
| Thermal expansion | ||
| Dynamic viscosity at reference state | 0.1089 | |
| FVA 3A dynamic viscosity at reference state | 0.0807 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaiat, A.; Ibrahim, K.; Kirchner, E. Pitting Influence on Electrical Capacitance in EHL Rolling Contacts. Lubricants 2023, 11, 419. https://doi.org/10.3390/lubricants11100419
Zaiat A, Ibrahim K, Kirchner E. Pitting Influence on Electrical Capacitance in EHL Rolling Contacts. Lubricants. 2023; 11(10):419. https://doi.org/10.3390/lubricants11100419
Chicago/Turabian StyleZaiat, Anatoly, Karim Ibrahim, and Eckhard Kirchner. 2023. "Pitting Influence on Electrical Capacitance in EHL Rolling Contacts" Lubricants 11, no. 10: 419. https://doi.org/10.3390/lubricants11100419
APA StyleZaiat, A., Ibrahim, K., & Kirchner, E. (2023). Pitting Influence on Electrical Capacitance in EHL Rolling Contacts. Lubricants, 11(10), 419. https://doi.org/10.3390/lubricants11100419