Eccentric Rotor Drop Dynamics Study of Vertical Maglev Bearing System

Abstract
:1. Introduction
2. Literature Review
3. Research Methodology
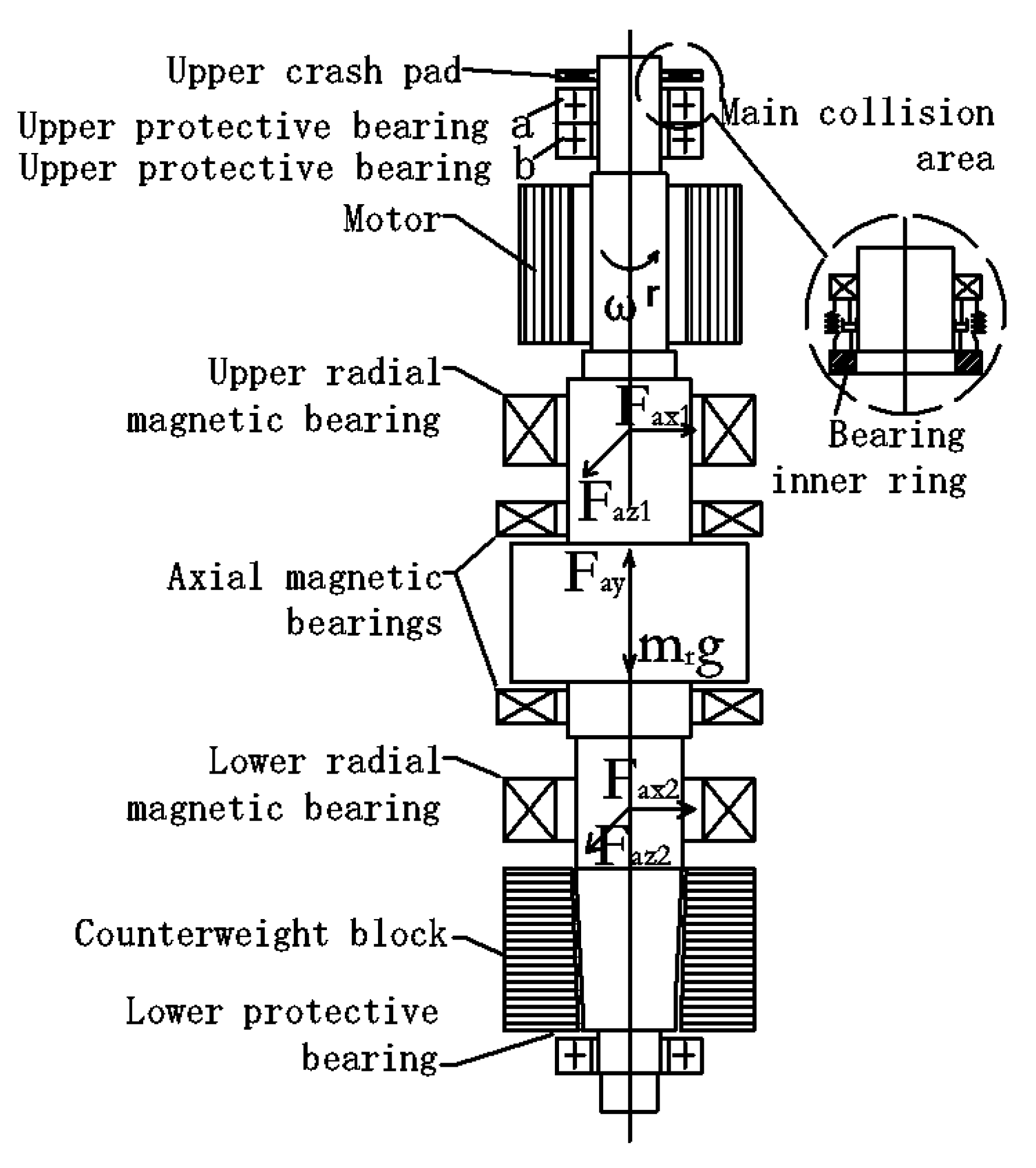
3.1. Working Principle of Vertical Maglev Bearing System
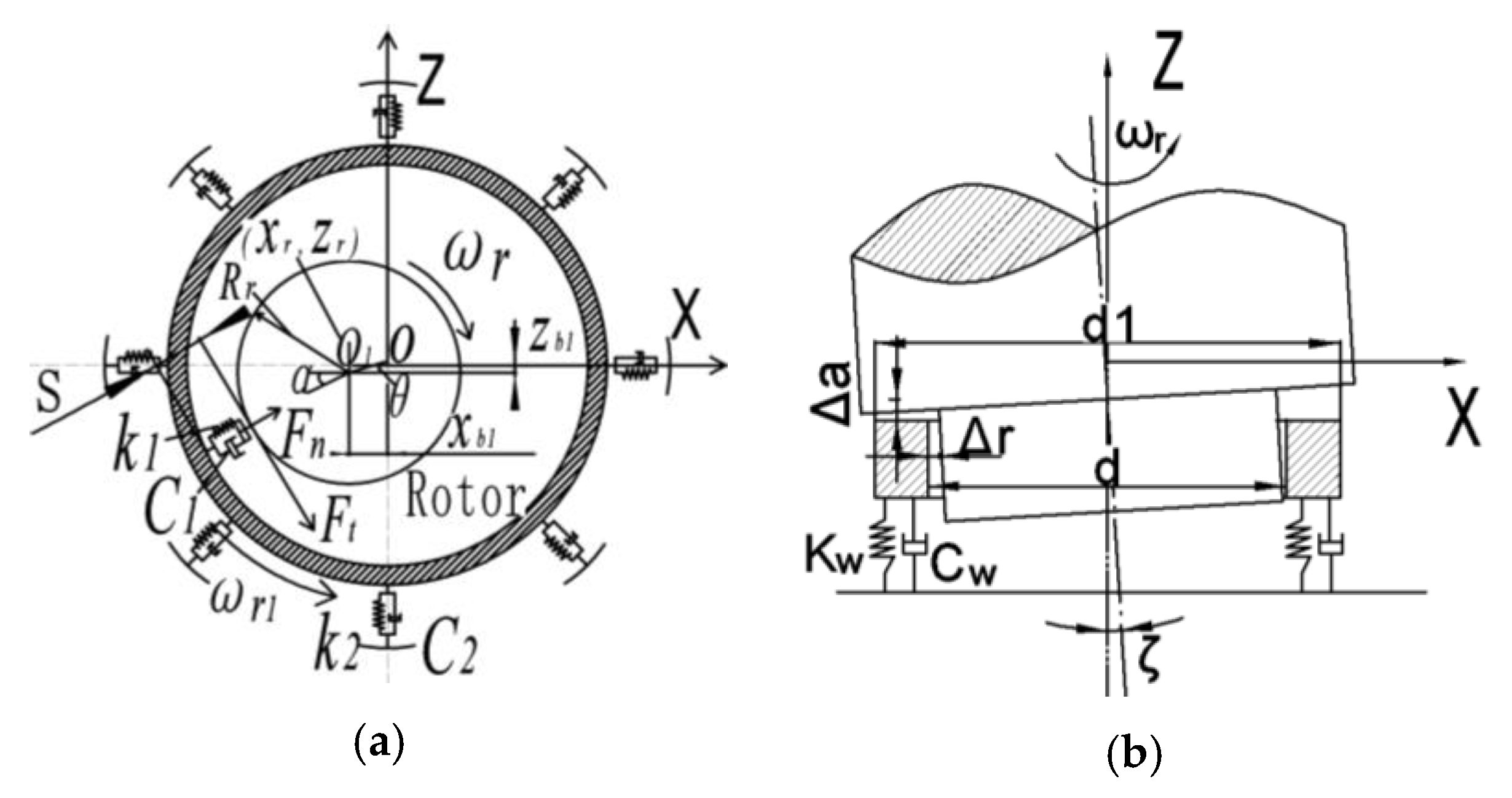
3.2. The Collision Model between the Rotor and the Protective Bearing
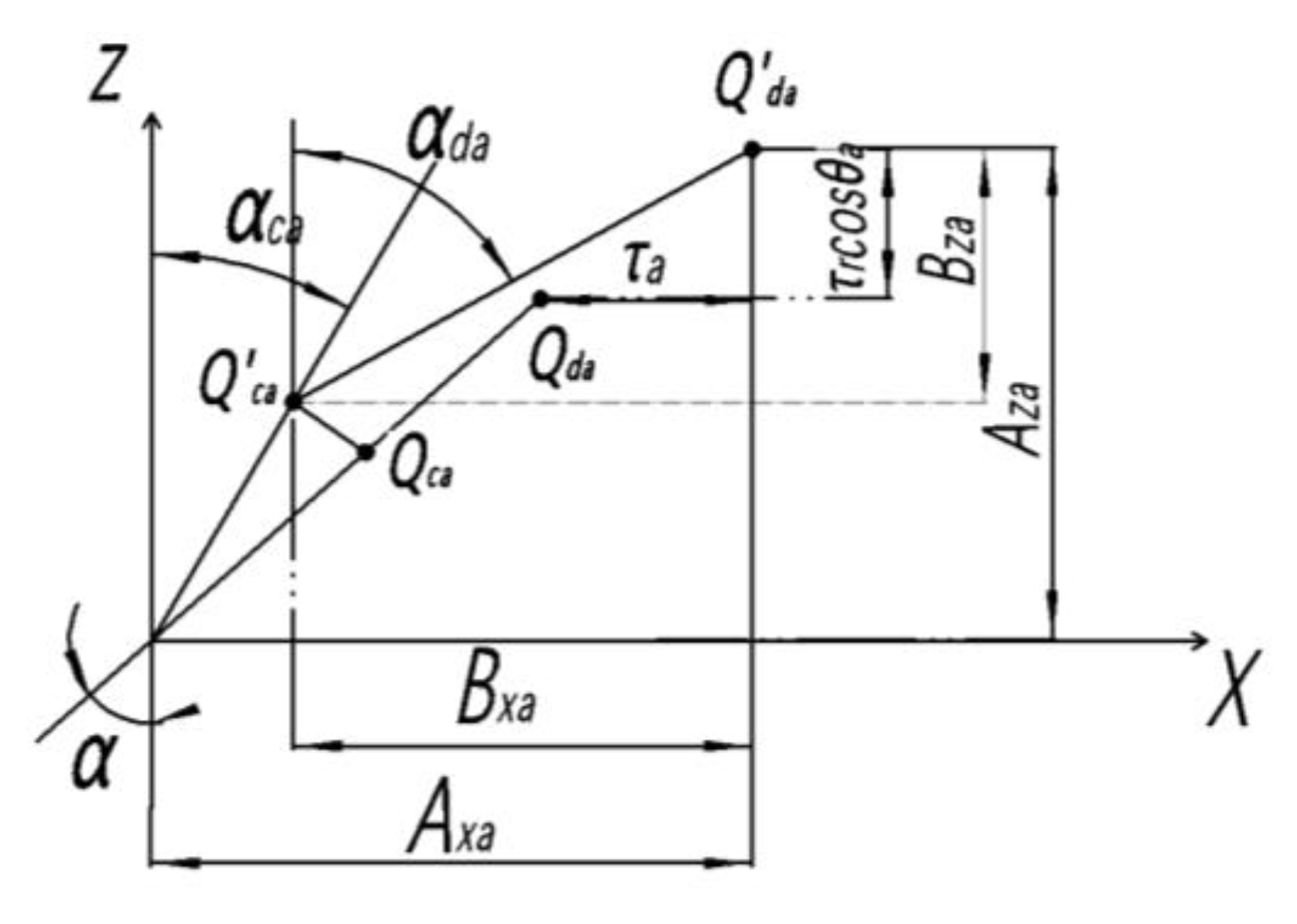
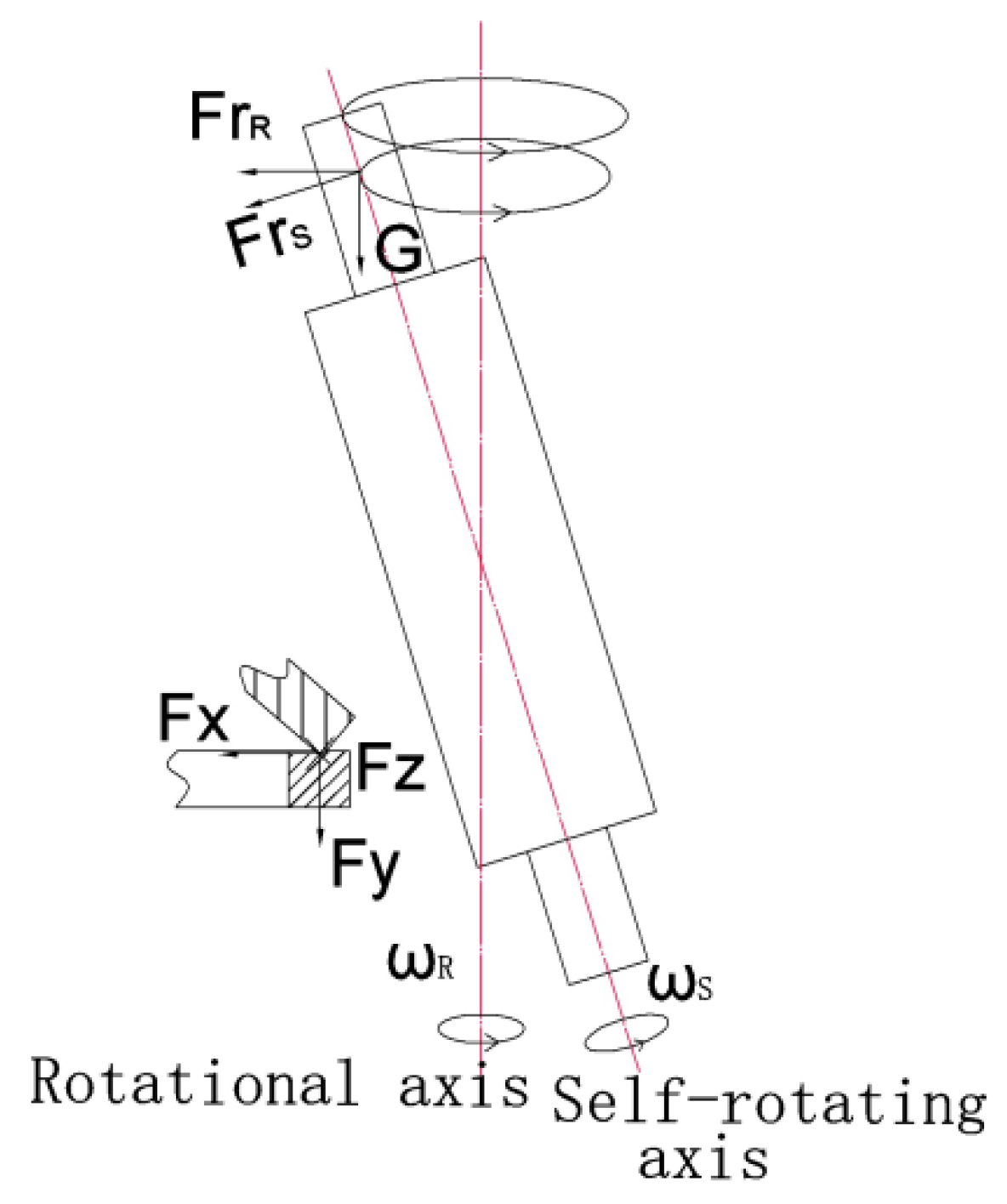
3.3. Dynamics Model of Protective Bearings
4. Results
4.1. Comparative Analysis of Collision Characteristics under Non-Eccentric and Eccentric Working Conditions
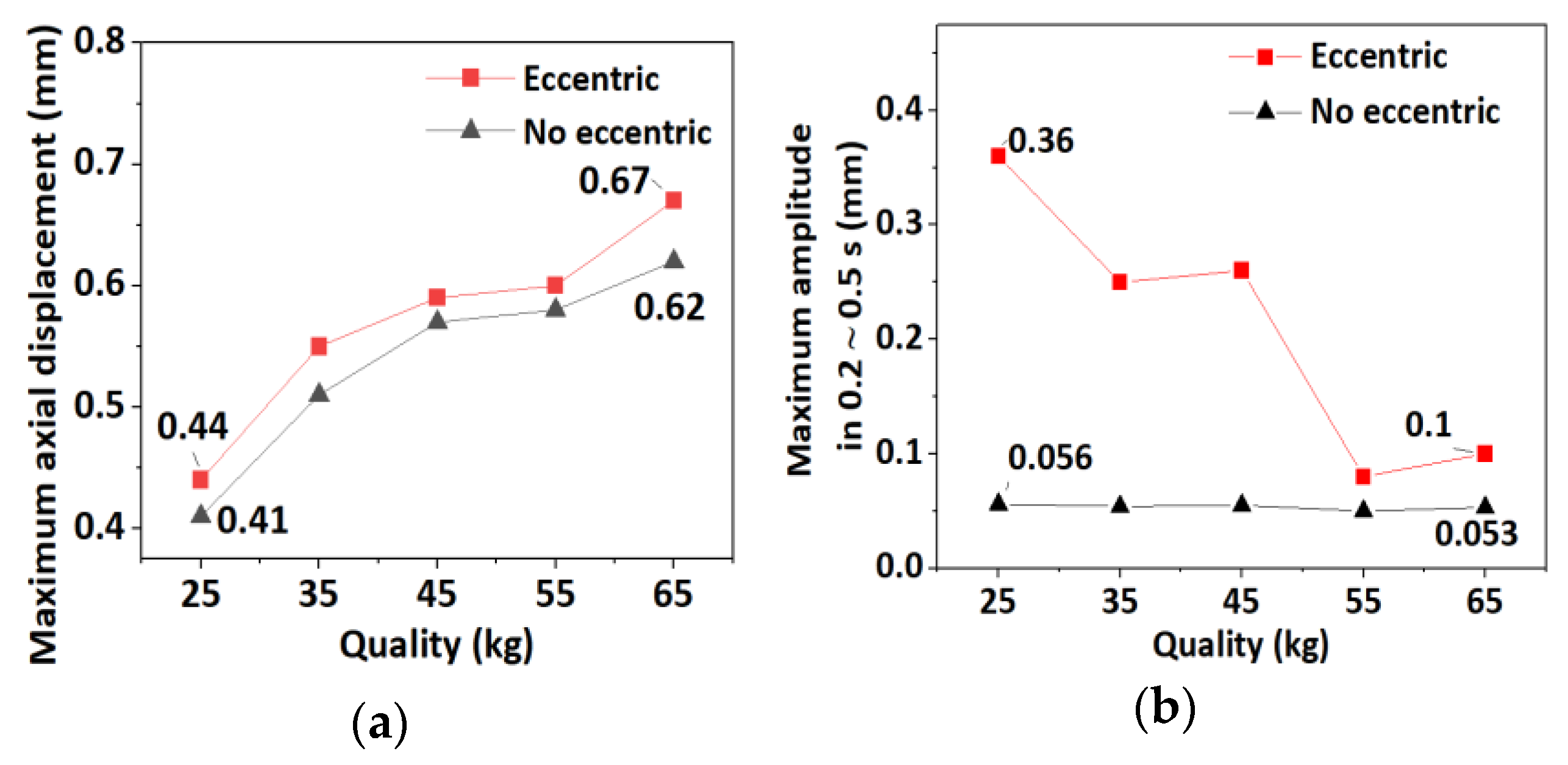
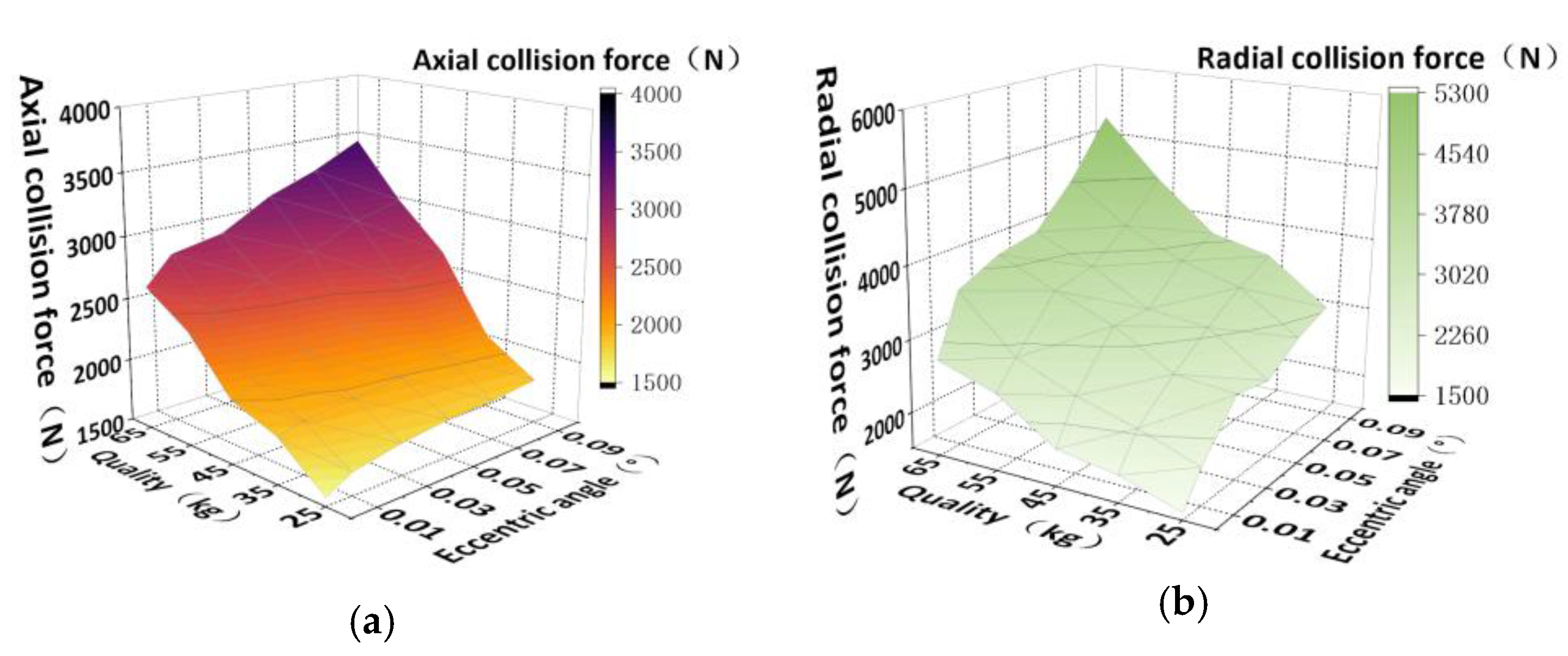
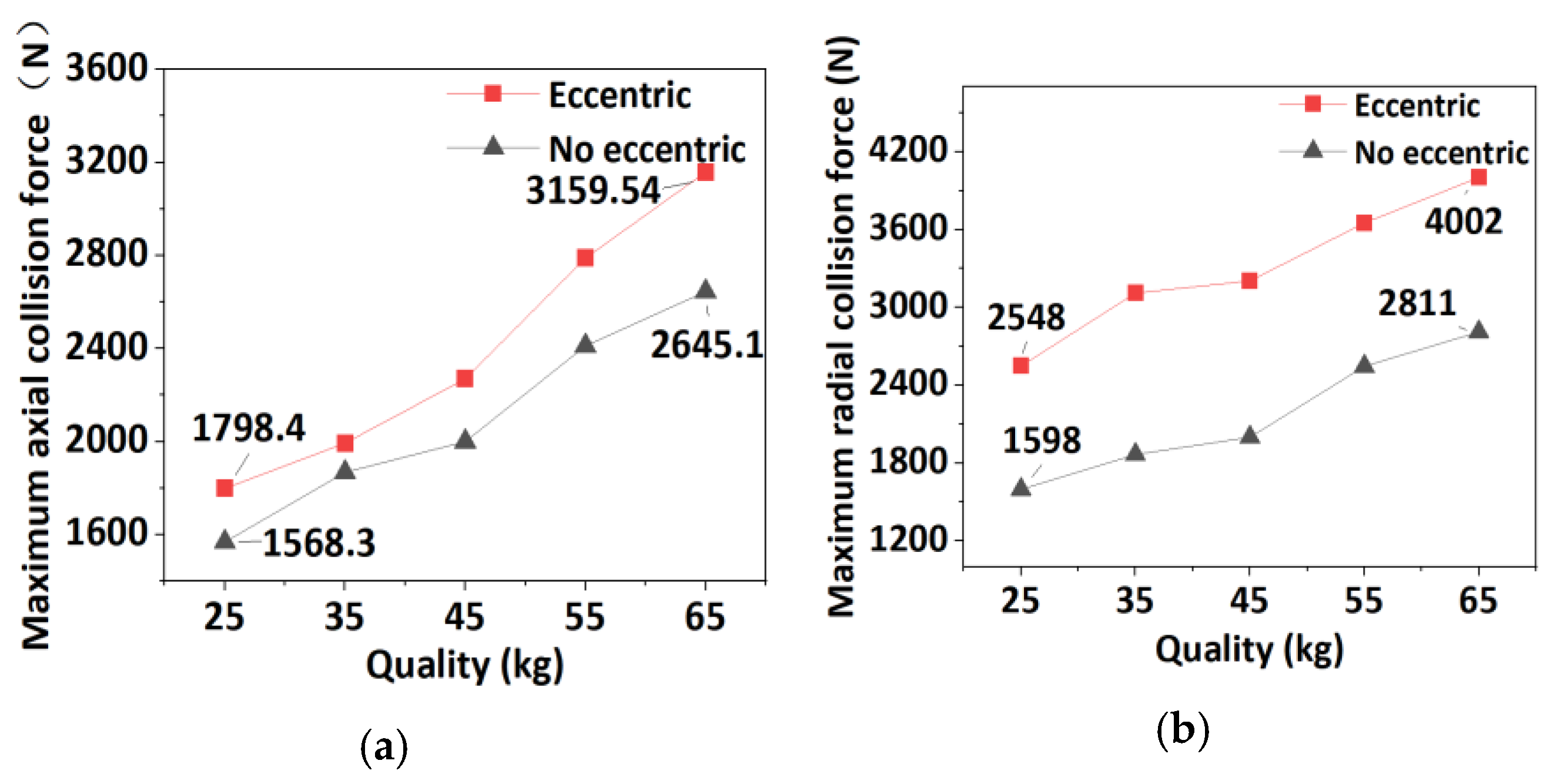
4.2. Effect of the Rotor Quality on the Collision
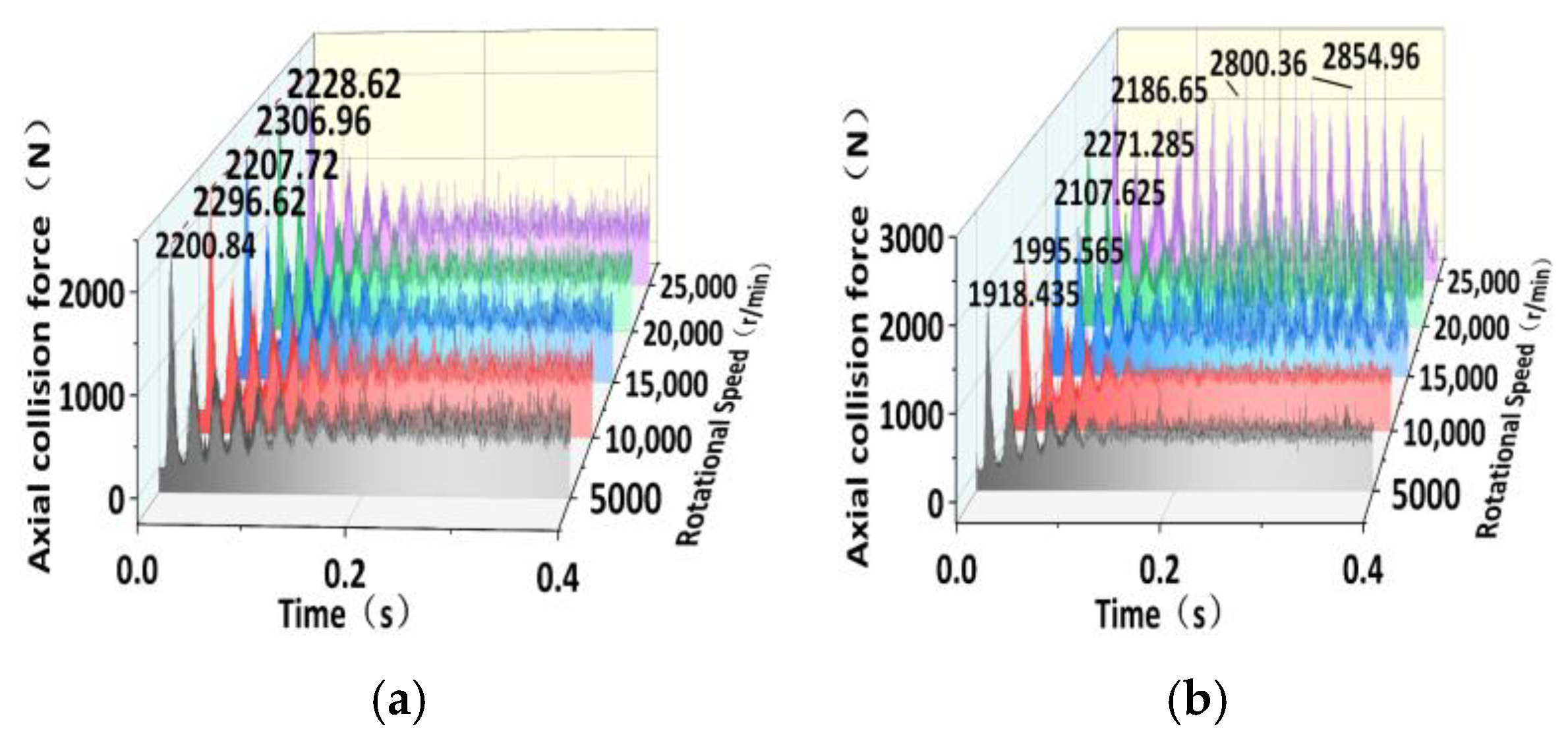
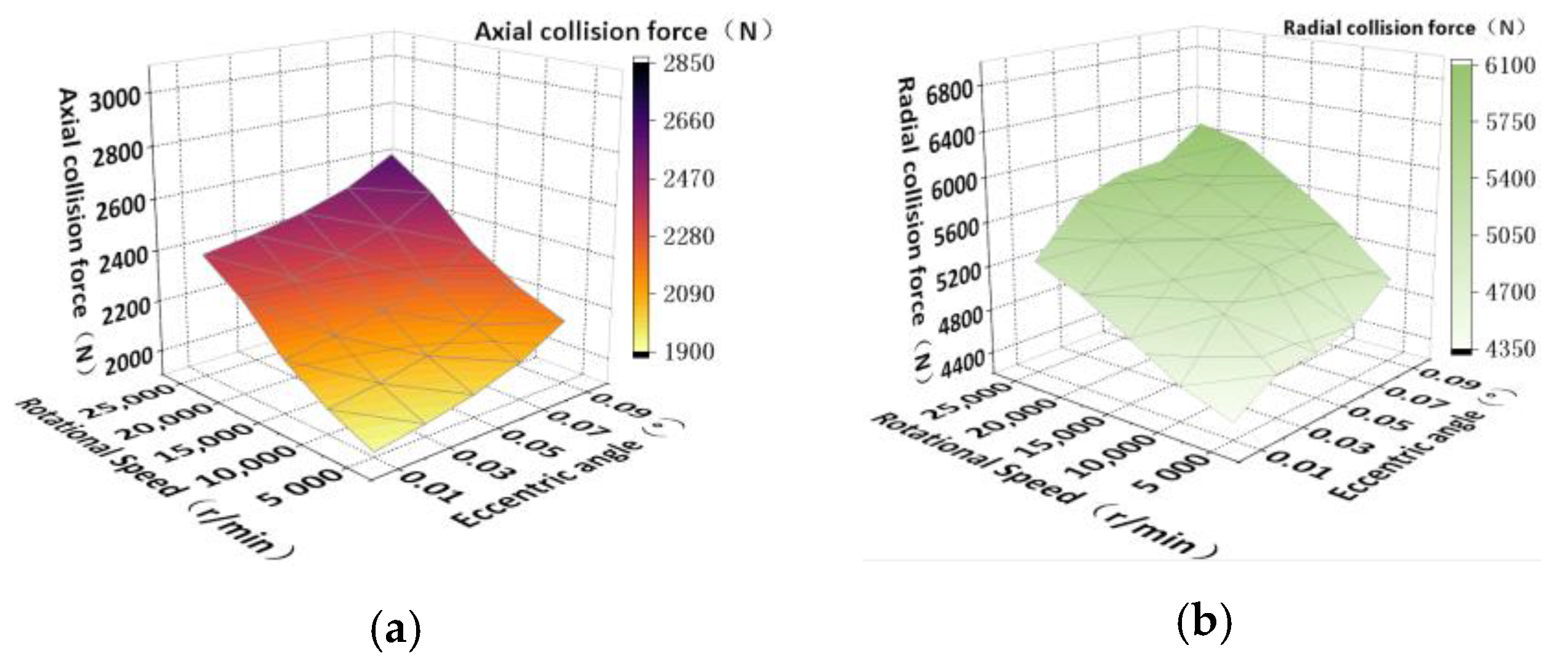
4.3. Influence of Rotor Speed on Collision
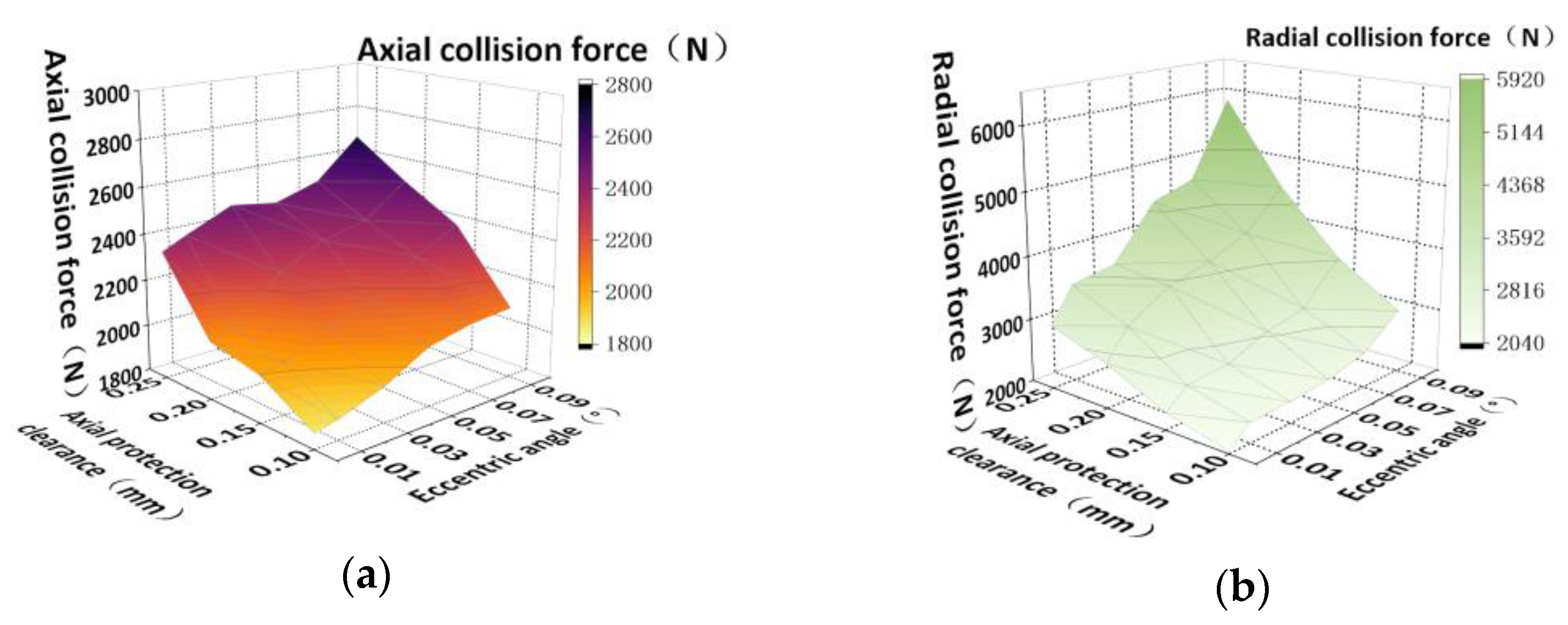
4.4. Effect of Axial Protective Clearance on Collision
5. Discussion of Drop Experiment
6. Conclusions
- (1)
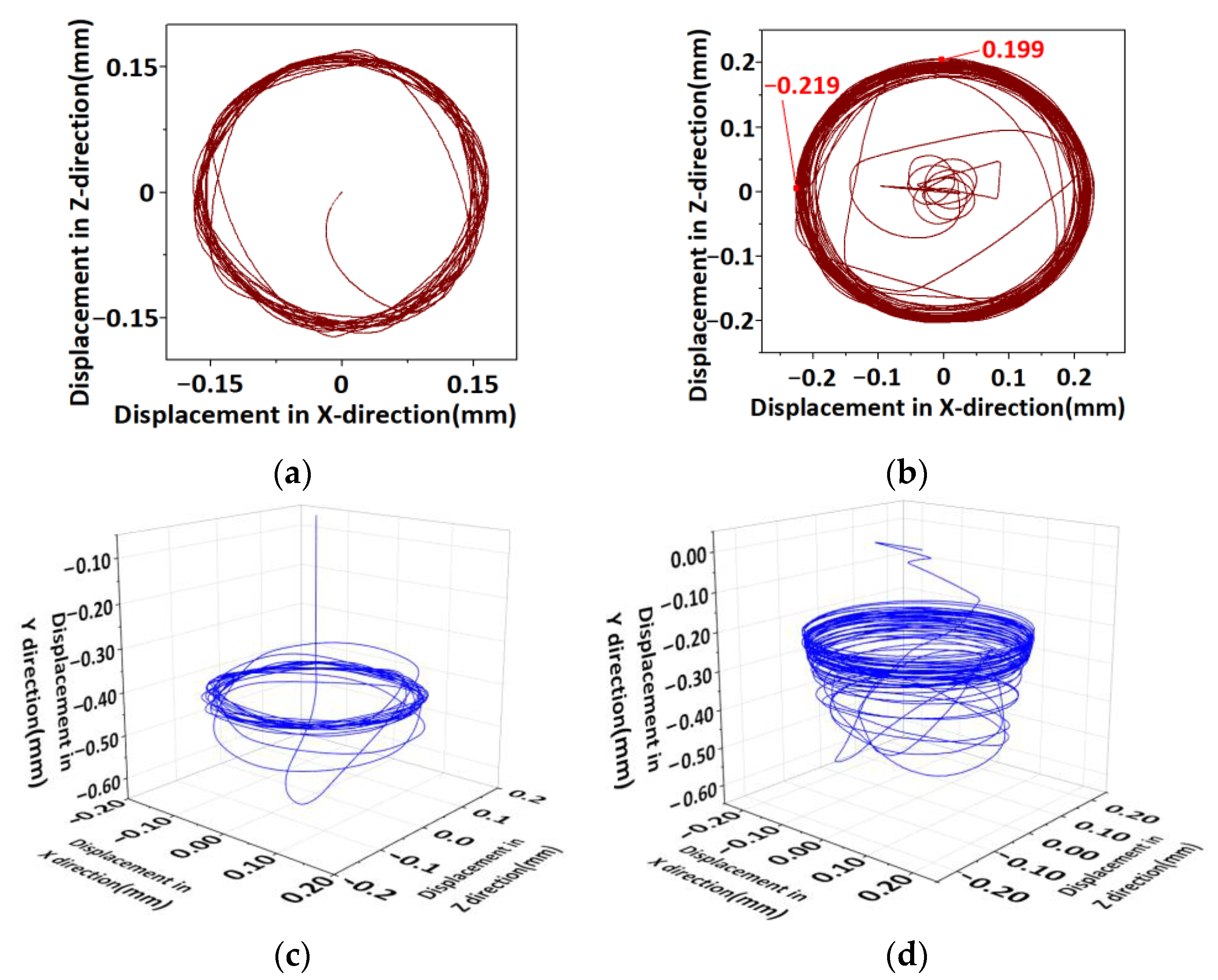
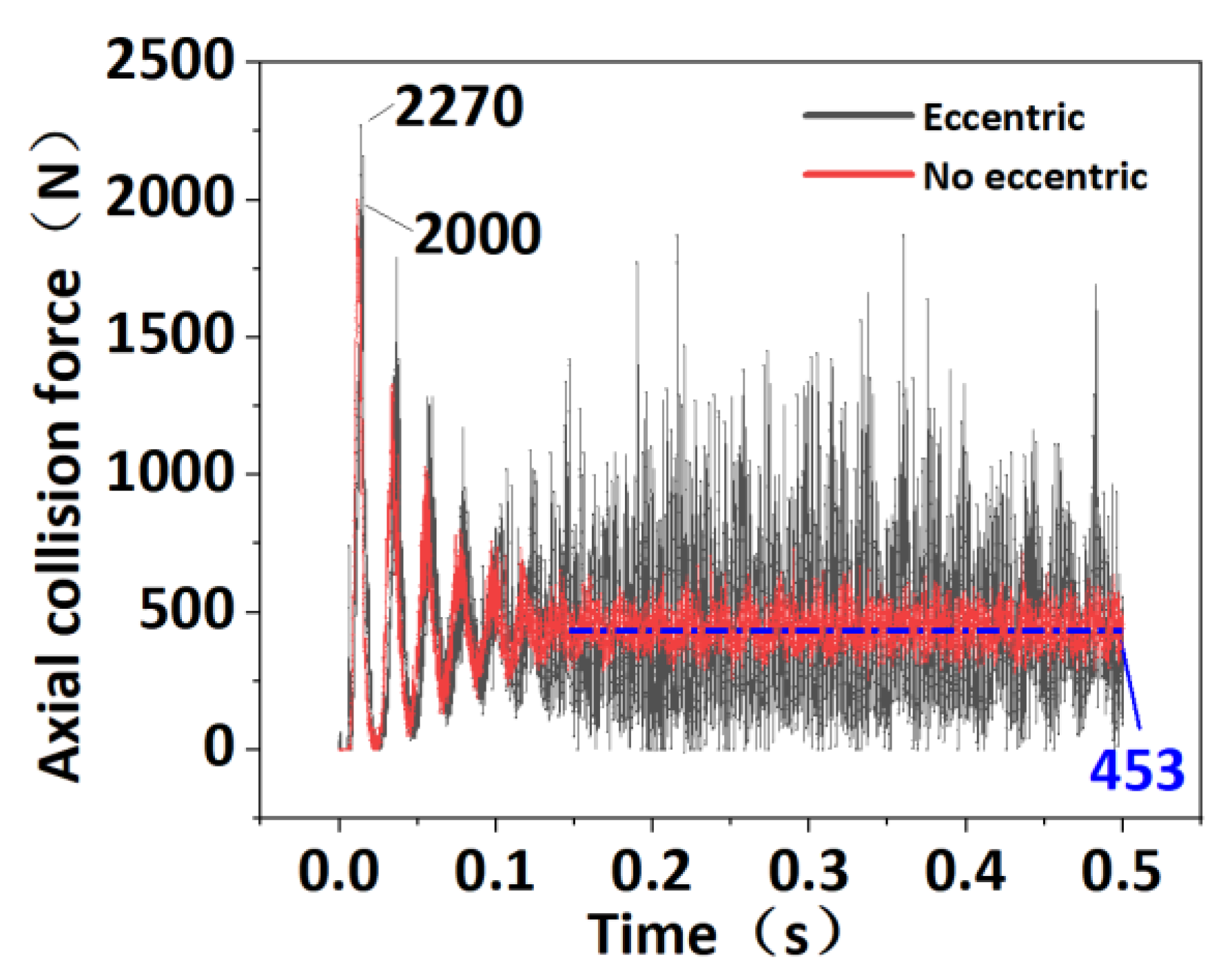
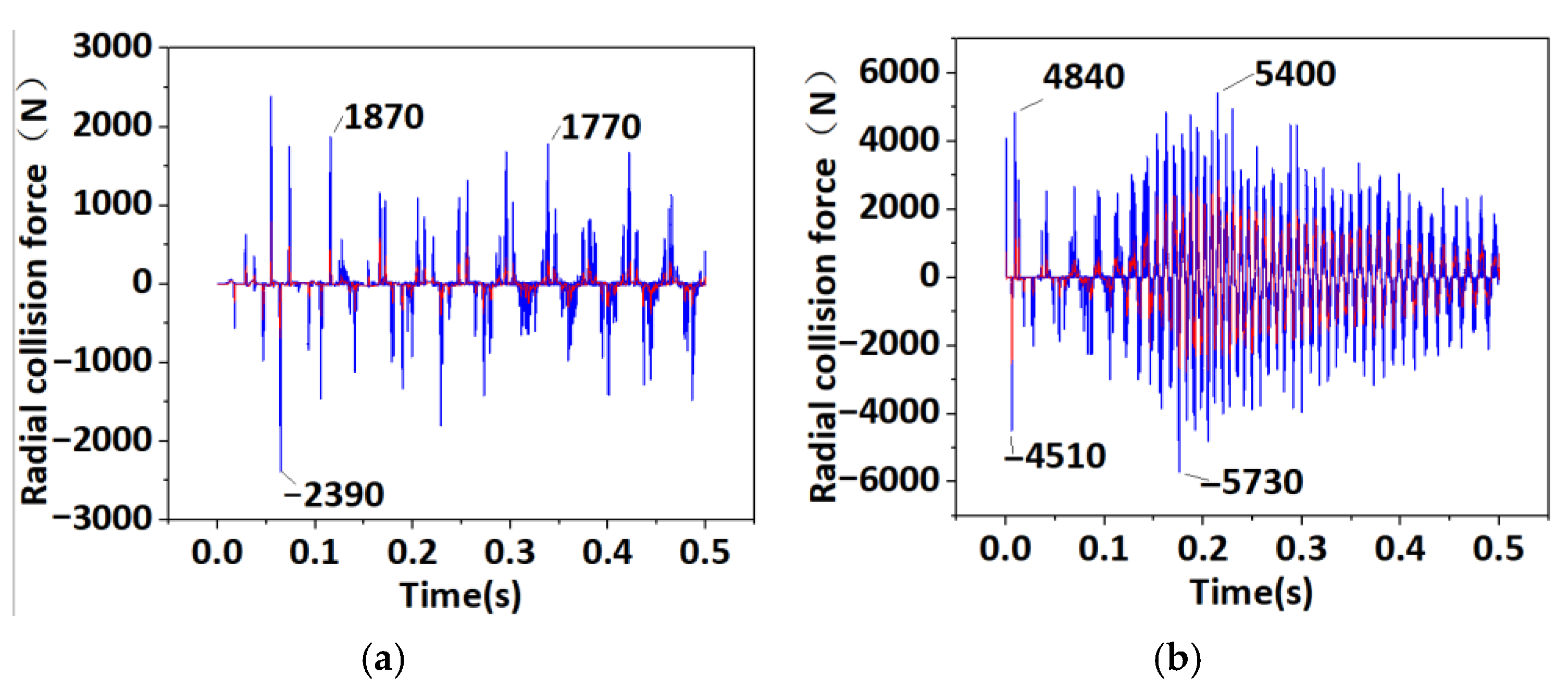
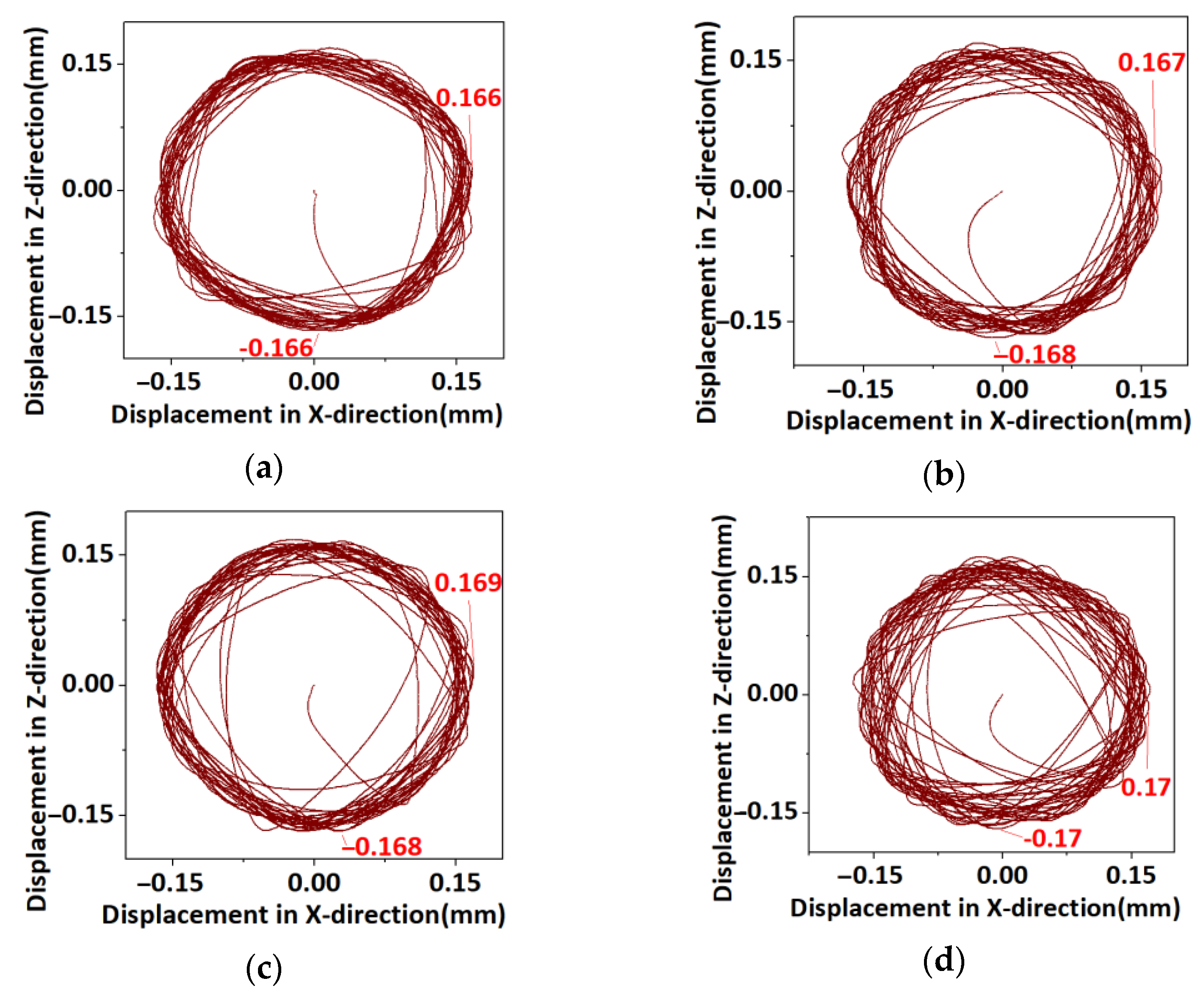
- Under eccentric conditions, an ellipse with a long axis of 0.225 mm larger than the radial protection clearance is synthesized after the rotor falls. The axis locus under non-eccentric conditions is a circle with a diameter of 0.158 mm. Compared with the non-eccentric condition, the radial impact force increases by 140% on average, and the maximum axial impact force increases by 14%. Both of them produce high collision force, which is close to the maximum value continuously after 0.1 s. The results show that the eccentric condition has a great adverse effect on the stability of the axial displacement of the rotor, and both axial and radial impact forces are multiplied.
- (2)
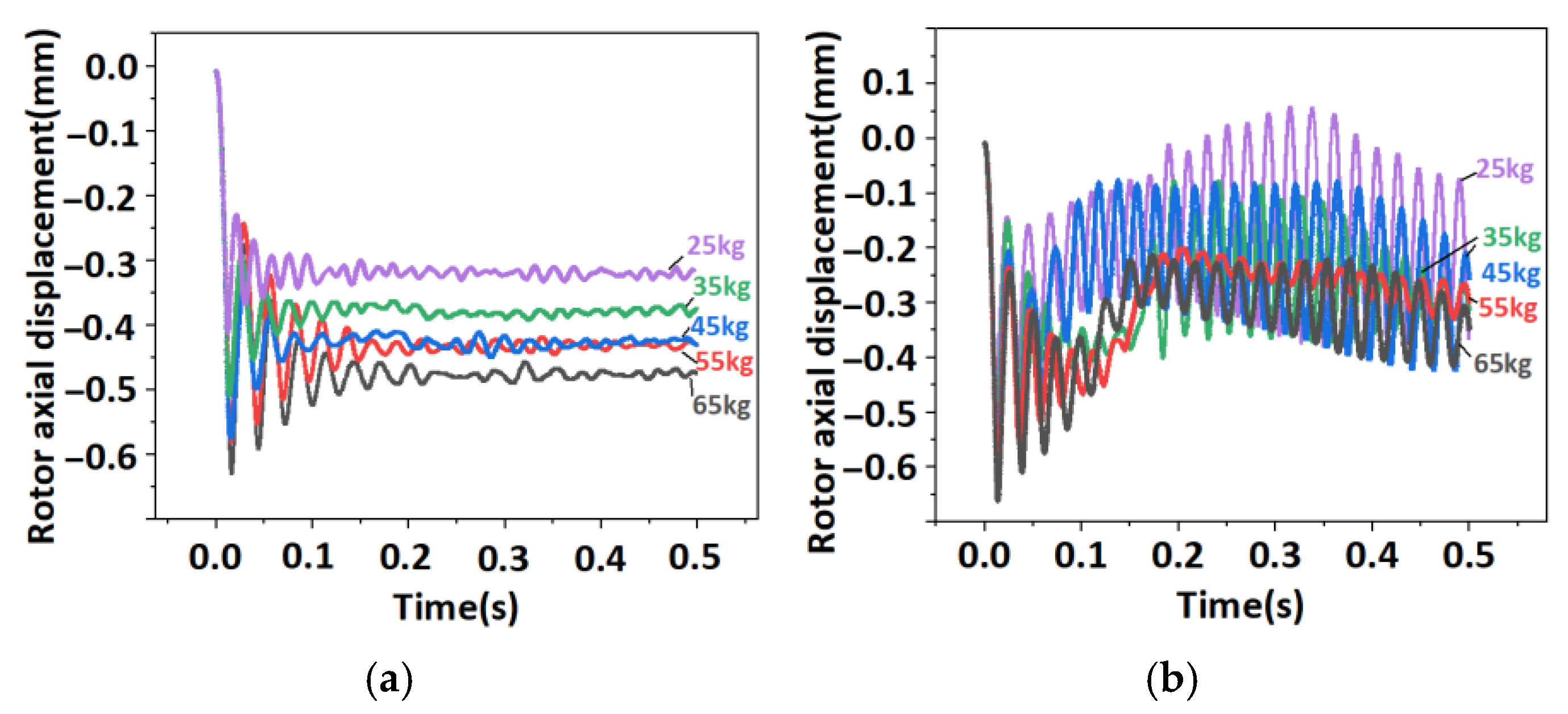
- With the increase in rotor quality, compared with the non-eccentric condition, the average increase of rotor axial drop displacement in the eccentric condition is 0.04 mm, and the amplitude in depth is increased by 350%. With the increase in eccentric angle, the axial impact force increases by 1.75 times, and the radial impact force increases by 60%. The results show that the change of quality can deepen the axial penetration depth after the rotor drops under eccentric conditions and has a great influence on the axial and radial impact force.
- (3)
- With the increase in rotor speed, the maximum axial impact force decreases slightly, and the radial impact force increases by 110% compared with the non-eccentric condition. The maximum axial impact force changes slightly under non-eccentric conditions. An ellipse with a long axis of 0.214 mm, which is larger than the radial protection clearance, is synthesized from the rotor drop trajectory under eccentric conditions. The results show that the increase in rotational speed has little effect on the axial impact force, but a great effect on the radial impact force, and the collision between the rotor and the inner ring leads to the trajectory disorder.
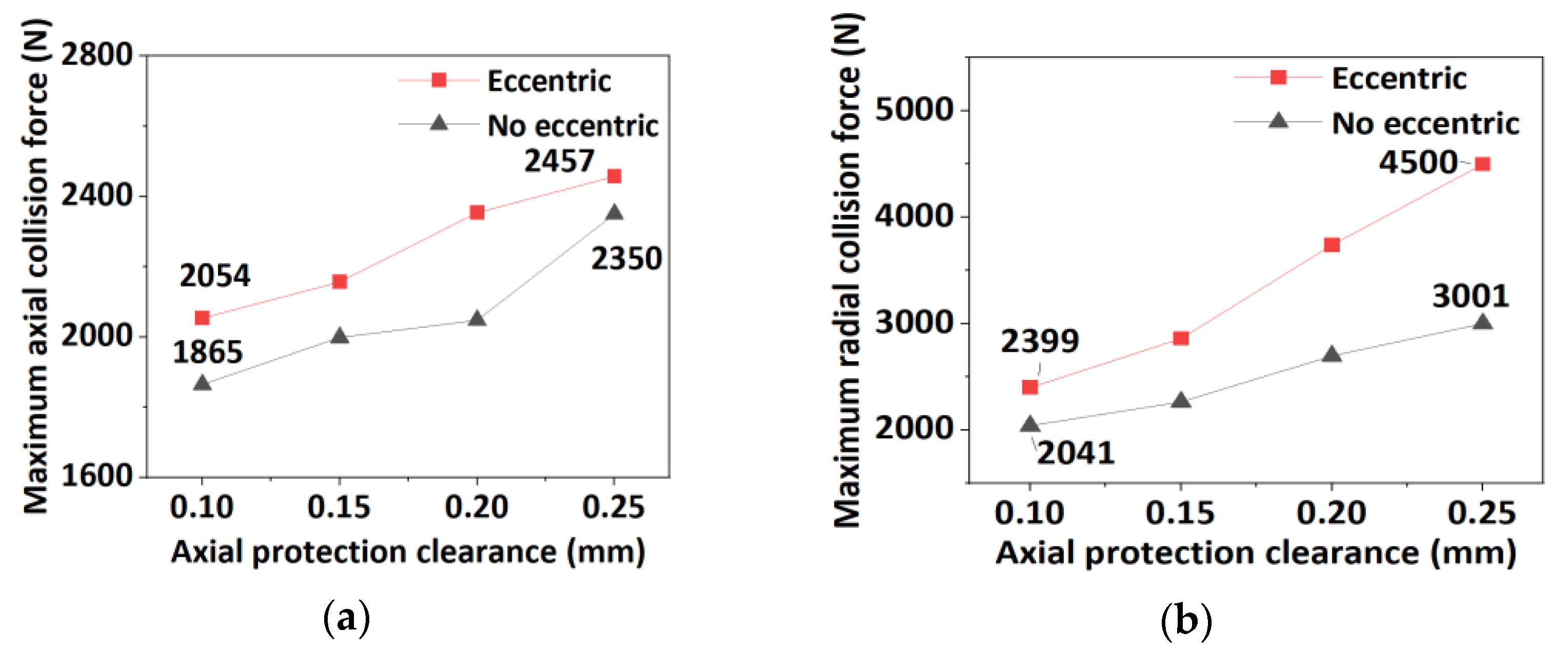
- (4)
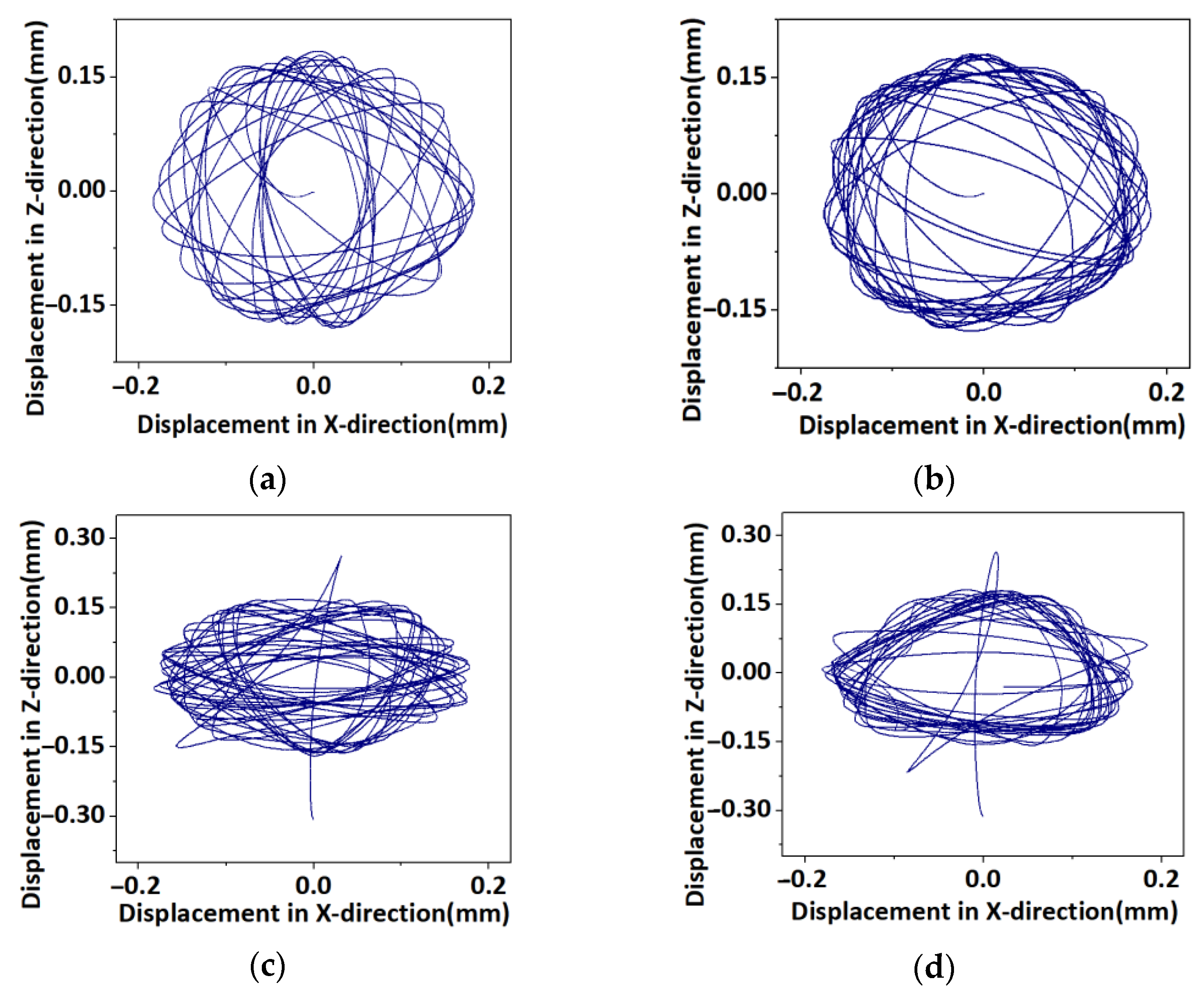
- With the increase of the axial protection clearance Δh, the pseudo-circle degree of the rotor axis displacement trajectory becomes worse in both non-eccentric and eccentric conditions. The trajectory under eccentric conditions is an ellipse with a radial fitting growth axis of 0.21 mm larger than the radial protection clearance of 0.2 mm. With the increase of eccentric angle, the average increase of the maximum axial force is 120 N, and the average increase of the maximum radial force is two times. The results show that the increase of the axial protection clearance will cause the disturbance of the radial displacement trajectory of the rotor, and the axial impact force will increase slightly, but the radial impact force will be greatly affected.
- (5)
- After trial verification, the rotor speed increases the rotor radial axis trajectory to the degree of poor rounding and radial displacement from 0.15 mm to 0.18 mm. The force of the protective bearing outer ring increased from 1169.7 N to 1210 N. The inner ring groove and end face scratching are obvious, and frictional heat increases.
Author Contributions
Funding
Conflicts of Interest
References
- Gao, H.; Xu, L. Real-time Feed-forward Force Compensation for Active Magnetic Bearings System Based on H∞ Controller. Chin. J. Mech. Eng. 2011, 24, 58–66. [Google Scholar] [CrossRef]
- Zhang, W.; Zhu, H.; Yuan, Y. Study on Key Technologies and Applications of Magnetic Bearings. Trans. China Electrotech. Soc. 2015, 30, 12–20. [Google Scholar]
- Xia, X. Dynamics of Magnetic Suspended Rotor Drop on Auto Eliminating Clearance Auxiliary Bearings. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2014. [Google Scholar]
- Khanlo, H.M.; Ghayour, M.; Ebrahimi, R. Chaotic Vibration Analysis of a Coaxial Rotor System in Active Magnetic Bearings and Contact With Auxiliary Bearings. J. Comput. Nonlinear Dyn. 2016, 12, 031012. [Google Scholar]
- Wu, G.; Lu, B.; He, D.; Song, C. The research and analysis on critical speed of auxiliary support system for magnetic suspension wind turbine. Mod. Manuf. Eng. 2018, 458, 14. [Google Scholar]
- Kong, Y.; Xue, Y.; Ye, J.; Jiao, Y. Impact Characteristics of Vertical Rotor Dropping on Auxiliary Bearings. Mach. Tool Hydraul. 2021, 49, 6–11. [Google Scholar]
- Zhu, Y.; Jin, C.; Xu, L. Effect of different elastic ring installation locations in catcher bearing system on rotor drop dynamic responses. J. Aerosp. Power 2012, 27, 1671–1680. [Google Scholar]
- Wei, P.; Wang, Y.; Yang, Y.; Yan, L.; Xu, L. An analysis of the contact force between a floating rotor and a retainer bearing after rotor drop. J. Vib. Shock 2018, 37, 251–258. [Google Scholar]
- Zhao, J.; Yang, G.; Li, Y.; Yu, S.; Xu, L. Numerical Analysis of Magnetically Suspended Rotor in HTR-10 Helium Circulator Being Dropped into Auxiliary Bearings. Nucl. Power Eng. 2012, 33, 61–64. [Google Scholar]
- Keogh, P.S.; Yong, W.Y. Thermal Assessment of Dynamic Rotor/Auxiliary Bearing Contact Events. J. Tribol. 2006, 129, 143–152. [Google Scholar] [CrossRef]
- Ma, Z.; Zhao, D.; Ni, Y. The Dynamic Response Analysis of Floating Rotor-Touchdown Bearing in AMB System. Bearing 2022, 65, 1–9. [Google Scholar]
- Ma, L.; Lin, M.; Shijun, W.; Peng, W. Research on the Dynamic Characteristics of Magnetic Bearing-rotor System with Auxiliary Bearing. J. Phys. Conf. Ser. 2020, 1637, 012140. [Google Scholar] [CrossRef]
- Yang, G.; Xu, Y.; Shi, Z.; Gu, H. Characteristic analysis of rotor dynamics and experiments of active magnetic bearing for HTR-10GT. Nucl. Eng. Des. 2006, 237, 1363–1371. [Google Scholar]
- Zhu, C. Nonlinear dynamics of rotor drop on rolling element backup bearings after active magnetic bearings failure. J. Mech. Eng. 2006, 7, 196–202. [Google Scholar] [CrossRef]
- Li, Z.; Shi, Z.; Tie, X.; Yang, G.; Ren, W.; Yao, J.; Wang, Y.; Wang, Z. Failure Mechanism on Touchdown Bearing of Heavy Maglev Rotor Drop. China Mech. Eng. 2023, 34, 1009–1018. [Google Scholar]
- Altaf, S.; Mehmood, M.S.; Soomro, M.W. Advancement of Fault Diagnosis and Detection Process in Industrial Machine Environment. J. Eng. Sci. 2019, 6, D1–D8. [Google Scholar] [CrossRef] [Green Version]
- Lyu, M.; Liu, T.; Wang, Z.; Yan, S.; Jia, X.; Wang, Y. A control method of the rotor re-levitation for different orbit responses during touchdowns in active magnetic bearings. Mech. Syst. Signal Process. 2018, 105, 241–260. [Google Scholar] [CrossRef]
- Anna, T.; Enrico, M.; Andrea, R.; Alessandro, R.; Pierluca, D.A.; Amedeo, F.; Duccio, F.; Benjamin, D. Development and Experimental Validation of Auxiliary Rolling Bearing Models for Active Magnetic Bearings (AMBs) Applications. Int. J. Rotat. Mach. 2019, 2019, 4675286. [Google Scholar]
- Wang, Z.; Ding, H.; Chen, L. Modeling of a magnetic levitation energy harvesting system attaching a linear oscillator under multi-frequency excitation and its output power’s influencing parametric analysis. J. Vib. Shock 2018, 37, 225–229. [Google Scholar]
- Fang, B.; Zhang, J.; Hong, J.; Yan, K. Research on the Nonlinear Stiffness Characteristics of Double-Row Angular Contact Ball Bearings under Different Working Conditions. Lubricants 2023, 11, 44. [Google Scholar] [CrossRef]
- Fumagalli, M.A.; Schweitzer, G.; Ulbrich, H. Modelling and Measurement Analysis of the Contact Interaction between a High Speed Rotor and Its Stator. Ph.D. Dissertation, ETH Zürich, Zürich, Switzerland, 1997. [Google Scholar]
- Neisi, N.; Sikanen, E.; Heikkinen, J.E.; Sopanen, J. Effect of off-sized balls on contact stresses in a touchdown bearing. Tribol. Int. 2018, 120, 340–349. [Google Scholar] [CrossRef]
- Liu, T.; Lyu, M.; Wang, Z.; Yan, S. An identification method of orbit responses rooting in vibration analysis of rotor during touchdowns of active magnetic bearings. J. Sound Vib. 2018, 414, 241–260. [Google Scholar] [CrossRef]
- Ma, S.; Yin, Y.; Chao, B.; Yan, K.; Fang, B.; Hong, J. A real-time coupling model of bearing-rotor system based on semi-flexible body element. Int. J. Mech. Sci. 2023, 245, 108098. [Google Scholar] [CrossRef]
- Inayat-Hussain, J.I. Nonlinear Dynamics of a Magnetically Supported Flexible Rotor in Auxiliary Bearings. J. Phys. Conf. Ser. 2020, 1489, 012015. [Google Scholar] [CrossRef]
- Yang, G.; Zhao, L.; Keogh, P.; Zhao, Y. Dynamic Analysis for the Rotor Drop Process and Its Application to a Vertically Levitated Rotor/Active Magnetic Bearing System. J. Tribol. 2017, 139, 041701. [Google Scholar]
- Wang, J.; Jia, X.; Zhang, K.; Xu, Y. Research on Dynamics of Magnetic Bearing Rotor Drop on Back-up Bearings. China Mech. Eng. 2022, 33, 2403–2413. [Google Scholar]
- Zhu, Y.; Jin, C.; Lian, C.; Zhen, Z. Dynamic Analysis of Vertical Rotor Drops Onto Deep Groove Ball Catcher Bearing. Mach. Des. Res. 2017, 33, 72–77. [Google Scholar]
- Yu, C.; Sun, Y.; Wang, H.; Shan, W.; Chen, Y.; Qiu, R. Dynamic analysis of magnetic bearing rotor dropping on radial and axial integrated auxiliary bearing. Mech. Mach. Theory 2019, 140, 622–640. [Google Scholar] [CrossRef]
- Heikkinen, J.E.; Ghalamchi, B.; Viitala, R.; Sopanen, J.; Juhanko, J.; Mikkola, A.; Kuosmanen, P. Vibration analysis of paper machine’s asymmetric tube roll supported by spherical roller bearings. Mech. Syst. Signal Process. 2018, 104, 688–704. [Google Scholar] [CrossRef]
- Neisi, N.; Heikkinen, J.E.; Sopanen, J. Influence of surface waviness in the heat generation and thermal expansion of the touchdown bearing. Eur. J. Mech. A Solids 2018, 74, 34–37. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, Y.; Yan, X.; Zhao, J.; Shi, Z.; Chen, J.; Zhao, Y.; Yang, G. Experimental study on the novel rolling-sliding integrated auxiliary bearing in active magnetic bearing during rotor drop. Ann. Nucl. Energy 2020, 136, 107044. [Google Scholar] [CrossRef]
- Wang, D.; Wang, N.; Chen, K. Fixed-point Rubbing Characteristics of Magnetic Suspended Dual-rotor Systems. China Mech. Eng. 2021, 32, 1686–1699. [Google Scholar]
- Witanowski, Ł.; Breńkacz, Ł.; Szewczuk-Krypa, N.; Dorosińska-Komor, M.; Puchalski, B. Comparable analysis of PID controller settings in order to ensure reliable operation of active foil bearings. Eksploatacja i Niezawodność Maint. Reliab. 2022, 24, 377–385. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Model Number | Bore Diameter | Outside Diameter | Width | Cr | Cor |
|---|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | (kN) | (kN) | ||
| Deep groove ball bearing | 61809 | 45 | 58 | 7 | 6.40 | 5.60 |
| Angular contact ball bearing | 71913C | 65 | 90 | 13 | 20.8 | 21.2 |
| Name | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Rotor quality (kg) | 25 | 35 | 45 | 55 | 65 |
| Axial protection clearance (mm) | 0.25 | ||||
| Rotor rotation speed (r/min) | 20,000 | ||||
| Name | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Rotor rotation speed (r/min) | 5000 | 10,000 | 15,000 | 20,000 | 25,000 |
| Rotor quality (kg) | 45 kg | ||||
| Axial protection clearance (mm) | 0.2 | ||||
| Name | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Axial protection clearance (mm) | 0.1 | 0.15 | 0.2 | 0.25 |
| Rotor quality (kg) | 45 | |||
| Rotor rotation speed (r/min) | 20,000 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, X.; Zhu, D.; Qiu, M.; Wang, D.; Wang, X. Eccentric Rotor Drop Dynamics Study of Vertical Maglev Bearing System. Lubricants 2023, 11, 246. https://doi.org/10.3390/lubricants11060246
Pang X, Zhu D, Qiu M, Wang D, Wang X. Eccentric Rotor Drop Dynamics Study of Vertical Maglev Bearing System. Lubricants. 2023; 11(6):246. https://doi.org/10.3390/lubricants11060246
Chicago/Turabian StylePang, Xiaoxu, Dingkang Zhu, Ming Qiu, Dongfeng Wang, and Xinlong Wang. 2023. "Eccentric Rotor Drop Dynamics Study of Vertical Maglev Bearing System" Lubricants 11, no. 6: 246. https://doi.org/10.3390/lubricants11060246
APA StylePang, X., Zhu, D., Qiu, M., Wang, D., & Wang, X. (2023). Eccentric Rotor Drop Dynamics Study of Vertical Maglev Bearing System. Lubricants, 11(6), 246. https://doi.org/10.3390/lubricants11060246