1. Introduction
Magnetic bearings are used if an almost friction-less or wear-less operation is required. In this context, active magnetic bearings (AMBs) are used with increased regularity. In many applications of turbomolecular pumps, lubricant should be avoided. Therefore, active magnetic bearings are sometimes unavoidable for the rotor stabilization in this application field. The mechanical behavior of AMBs can be changed during operation. This feature allows an optimization of the rotor running behavior dependent on the operating point. AMBs use electro-magnets for force generation, instead of permanent magnets, which are used in passive magnetic bearings. However, to decrease the losses in AMBs, also permanent magnets (PMs) can be used for pre-magnetization [
1,
2]. AMB systems are unstable for open loop operation, and a feedback controller is required for a stable levitation. To close the feedback loop, the position information of the rotor is required. In many applications, this information is provided by different kinds of sensors. However, also self-sensing methods exist, where the actuator itself is used to detect the rotor position [
3,
4]. An AMB system is a nonlinear multiple input and multiple output (MIMO) system. A decentralized control is a quite straightforward method, because the proportional part can be interpreted as a spring and the derivative part as a damper [
5]. However, the coupling terms of the system description are not considered in the design procedure. As a consequence, the tilting and translation modes cannot be treated independently from each other, and the gyroscopic effect couples the motions of the tilting movements. In [
6,
7,
8], decoupling approaches are used based on the inverse dynamics to decouple the system and compensate the impact of the gyroscopic effect on the rigid body movement. In [
9,
10,
11,
12,
13,
14], modern control approaches, such as H∞ and
-synthesis control theory, were used. Due to the non-linear nature of AMBs, the use of linear time-invariant (LTI) controllers could lead to problems. In [
15,
16] a nonlinear feedback linearization based on differential geometric methods was used to solve this problem. Also sliding mode controller can be used to overcome the nonlinear nature of AMBs [
17]. However, many applications of magnetic bearings have a sufficient linear behavior, which allows the use of linear controllers. In many cases, the dynamic simulation is only done using beam elements, where the eigen-dynamics of the blade wheel is neglected. For such non-modeled effects in combination with the dynamic behavior of the control structure, complicated modern control approaches could be difficult to adjust. In contrast, proportional–integral–derivative (PID) controllers have a straightforward design procedure, and the mechanical behavior is easily adapted. Thus, the main share of industrial applications is based on PID controllers.
This paper deals with a control algorithm, which is based on the inverse dynamics of the system for the decoupling and compensation of the gyroscopic effect. For the decoupled system, a decentralized PID controller is developed. Compared to the gain schedule of the decentralized PID controller, this method compensates the parameter variant gyroscopic effect. Thus, the separating margin between the bending modes and the rigid body modes can be kept constant for a high speed range. The investigated rotor has low blade resonance frequencies, which lie near the operating range. Therefore, a Kalman filter is designed to decrease the gain of the control structure in the range of the blade resonance frequencies. Using the proposed control structure, the rotor could be prevented from destabilization caused by the blade frequencies. The functionality and robustness of the proposed control structure are shown in experimental results.
The contributions of the present paper can be summarized as follows:
A decoupled control procedure is developed for a magnetically-levitated rotor with low blade frequencies
The gain of the control structure is significantly reduced in the frequency range of the blade frequencies using a Kalman filter for the feedback of the tilting movement. Without the Kalman filter, the system becomes unstable above a certain speed.
The paper is organized as follows. In
Section 2, the basic system equations of the radial movement of a five-degree of freedom (5-DOF) magnetic bearing system is explained.
Section 3 explains the development of the control structure and describes the most important parameter to stabilize the magnetic levitated rotor.
Section 4 states the main results of the control structure applied on a turbomolecular pump.
Section 5 summarizes the conclusions of the paper.
2. Modeling of a 5-DOF AMB System
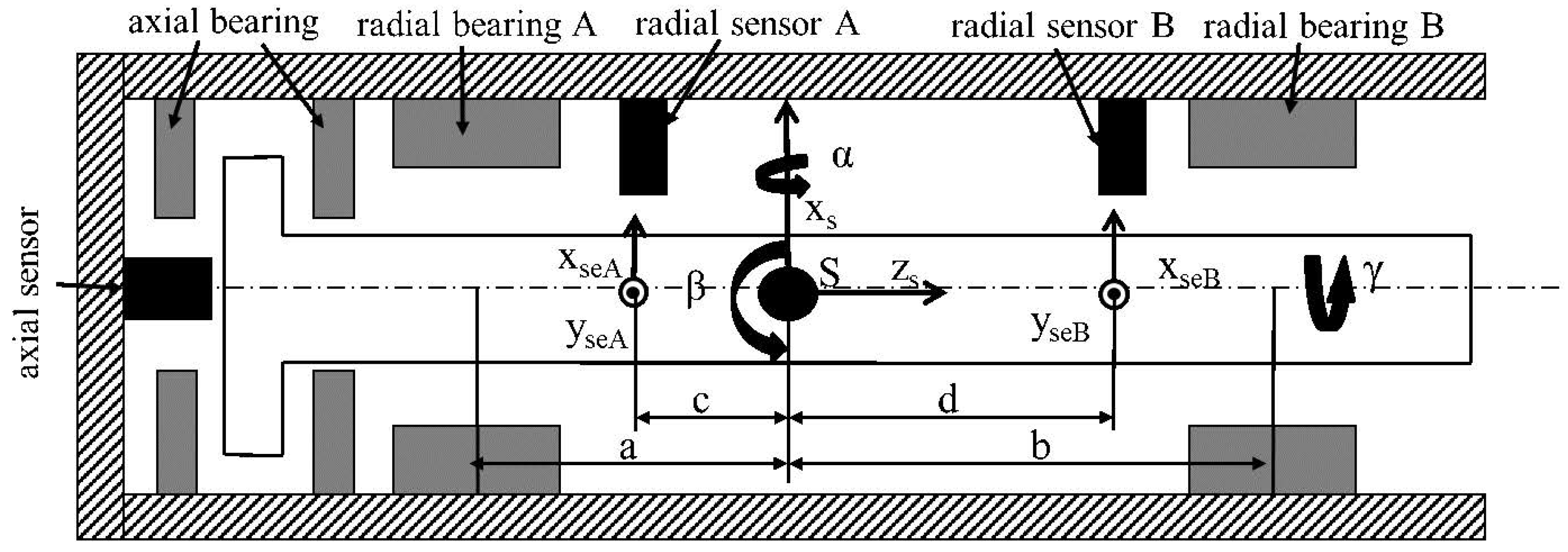
A 5-DOF AMB system consists of two radial bearings and one axial bearing according to
Figure 1. In many industrial applications of active magnetic bearings, the axial movement is not coupled with the radial movement for the controller design. In this case, the axial movement can be interpreted as a single input and single output (SISO) linear time-invariant (LTI) system. Especially for small displacements of the rotor compared to its size, the decoupled approximation is sufficient. The control of a SISO AMB system using a PID controller was already described in [
18]. Therefore, the aim of this paper is the control of the radial movement. An AMB applies forces on the rotor. Thus, no kinematic constraint has to be fulfilled for the rotor. For such a system, the Euler equations can be used directly for the rotational movement. For a general body, the Euler equations are given in a body fixed reference frame, because of the constant matrix of inertia. However, in the case of rotational symmetric rotors, the matrix of inertia is also constant in a non-body fixed frame. The Euler equations in a non-body fixed frame are given as:
where
is the angular velocity vector of the chosen coordinate system,
is the angular velocity vector of the body,
is the moment of inertia matrix and
is the torque vector. The translation movements are described using Newton’s law. The stabilized rotor in this paper is assumed to be rotationally symmetric. 5-DOF are stabilized by AMBs, and only the rotation around the
z-axis is controlled by an electrical motor with an independent speed controller. The equations of motion of the radial movement are described in a reference frame, which is the same as the body fixed, but without a rotation around the
z-axis. Under the following assumptions [
19]:
The rotor is symmetric and rigid
The displacement of the rotor is small compared to its dimensions
The angular velocity is assumed to be constant
the equations of motion are given as:
with:
where
is the equatorial moment of inertia,
is the polar moment of inertia,
m is the mass of the rotor, the entries of
are the forces or torques of each degree of freedom and the entries of
are the degrees of freedom according to
Figure 1. Equation (
2) describes the basic mechanical equation of a supported rotor. The system equation for different bearing structures lies in the calculation of the force vector
. For the magnetic bearing, a dominant magnetic field can be assumed in many cases. The electromagnetic force can be calculated with:
where
is a closed surface, which includes the considered body,
is the permeability of free space,
is the normal vector of the chosen surface and
is the flux density. For many magnetic bearing systems, the normal vector
and the flux density vector
are assumed to be collinear. If the flux density
in the air gap is additionally assumed to be constant in space, the force can be calculated using the following algebraic equation.
with the surface of the pole area
. Equation (
5) can be interpreted as a basic equation for calculating the force generation of magnetic bearings. The different structures and different geometries of active magnetic bearings differ only in the calculation of the magnetic flux
.
Figure 2 shows two common structures of AMBs.
Because the magnetic force depends on
, the forces at the pole areas can only pull the rotor. To overcome that problem, a bias flux
is used. If a resulting force should act in a specified direction, the flux is increased in the pole area of this direction and decreased in the opposite using a control current
or
. Thus, a resulting force is generated in the requested direction, although every single force in the pole areas pulls on the rotor. Magnetic bearing structures using the differential driving mode have only one coil for each pole. The bias current
and the control current
or
are superposed to the required coil current. Therefore, every degree of freedom requires two current controllers. For the differential winding mode, the bias flux is generated with separated coils. Therefore, the control flux can be created with only one current controller for every degree of freedom. In [
2,
3,
20], the bias flux is generated by permanent magnets. Such a magnetic bearing structure is called a permanent magnet biased active magnetic bearing (PMBAMB).
In this paper, the differential driving mode is used for the force generation. Using Ampere’s law and Equation (
5), the force in x-direction is given as:
with the air gap
if the rotor is in the reference position. In Equation (
6), it can be seen that the force depends nonlinearly on the force and the current. However, to use the elements of linear control theory, Equation (
6) is linearized, and it is assumed that
.
The derivation of the force in the y-direction is done in the same way. Combining the equation of the force generation (
7) with the basic mechanical Equation (
2) leads to the system equation of the magnetic bearing systems:
with:
where
and
are the linearized negative bearing stiffnesses and
and
are the linearized force to current factors of the bearings. In Equation (
2), only the rigid behavior of the rotor was considered. However, for many industrial applications, also the consideration of the flexible body modes is of great significance. In [
6], it was stated that the soft stiffness of magnetic bearings in many applications has a negligible impact on the eigen-frequencies of the flexible modes. Therefore, the flexible eigen-frequencies can be approximately found independent of the control structure. How the flexible body modes are stabilized by the phase shift of the controller is given in [
21]. For structures where the stiffness of the magnetic bearing cannot be neglected, the finite element method in combination with the dynamic simulation of the control structure can be used. Finally, it can be stated that it is possible to stabilize the flexible rotor, if the natural frequencies are known for fixed bearing stiffnesses in the whole speed range.
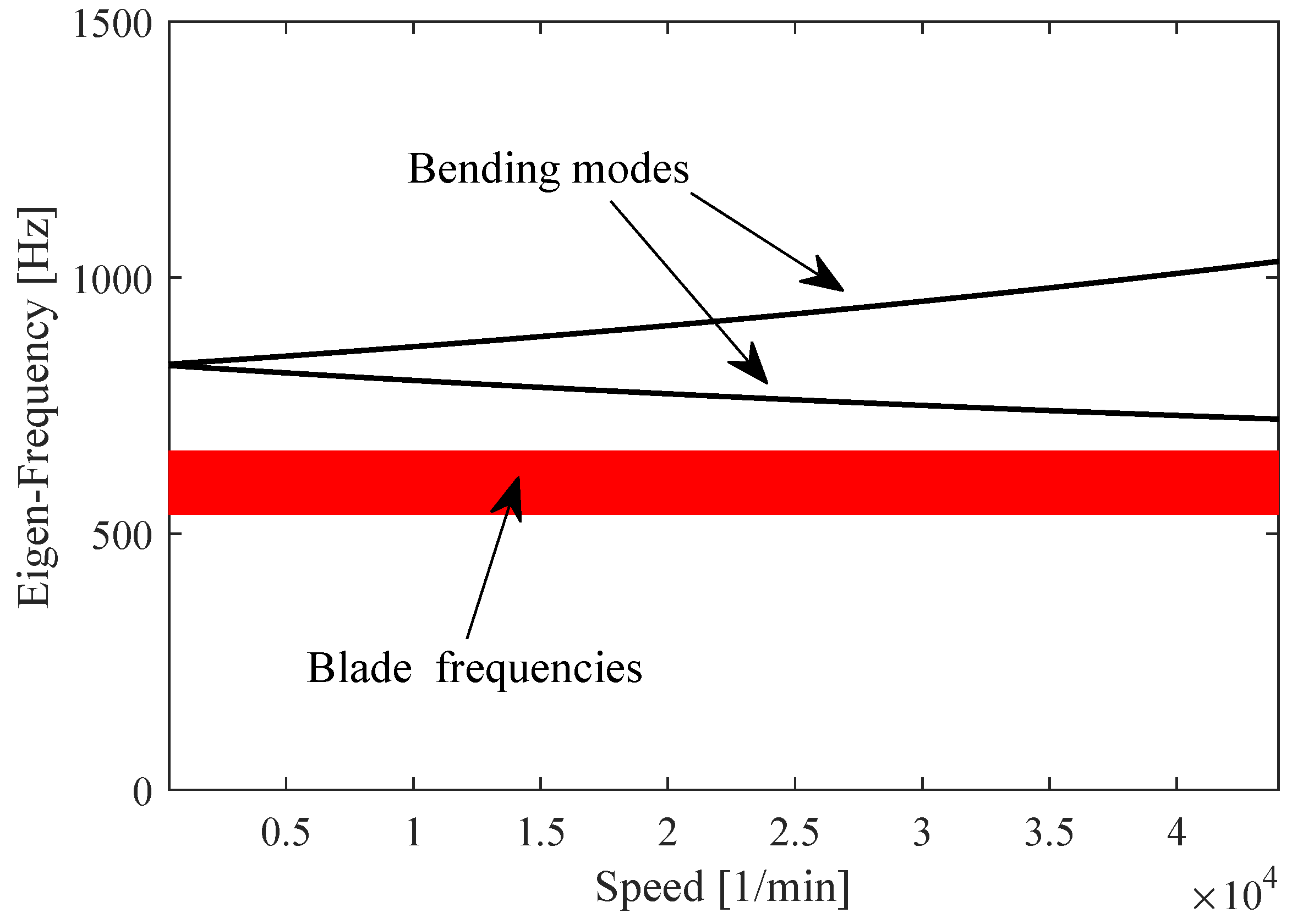
Figure 3 shows the flexible behavior of the investigated rotor.
The first bending modes are in a frequency range where they can destabilize the system. Therefore, the right phase shift has to be guaranteed in this frequency area using additional filters in the control structure. Because the blade frequencies fluctuate for different rotors of the same type and the blade frequencies depend on the rotor speed, the possible occurrence of blade frequencies is marked as a red band. These low resonance frequencies caused by the blade wheel can be destabilized by the control structure.
4. Results
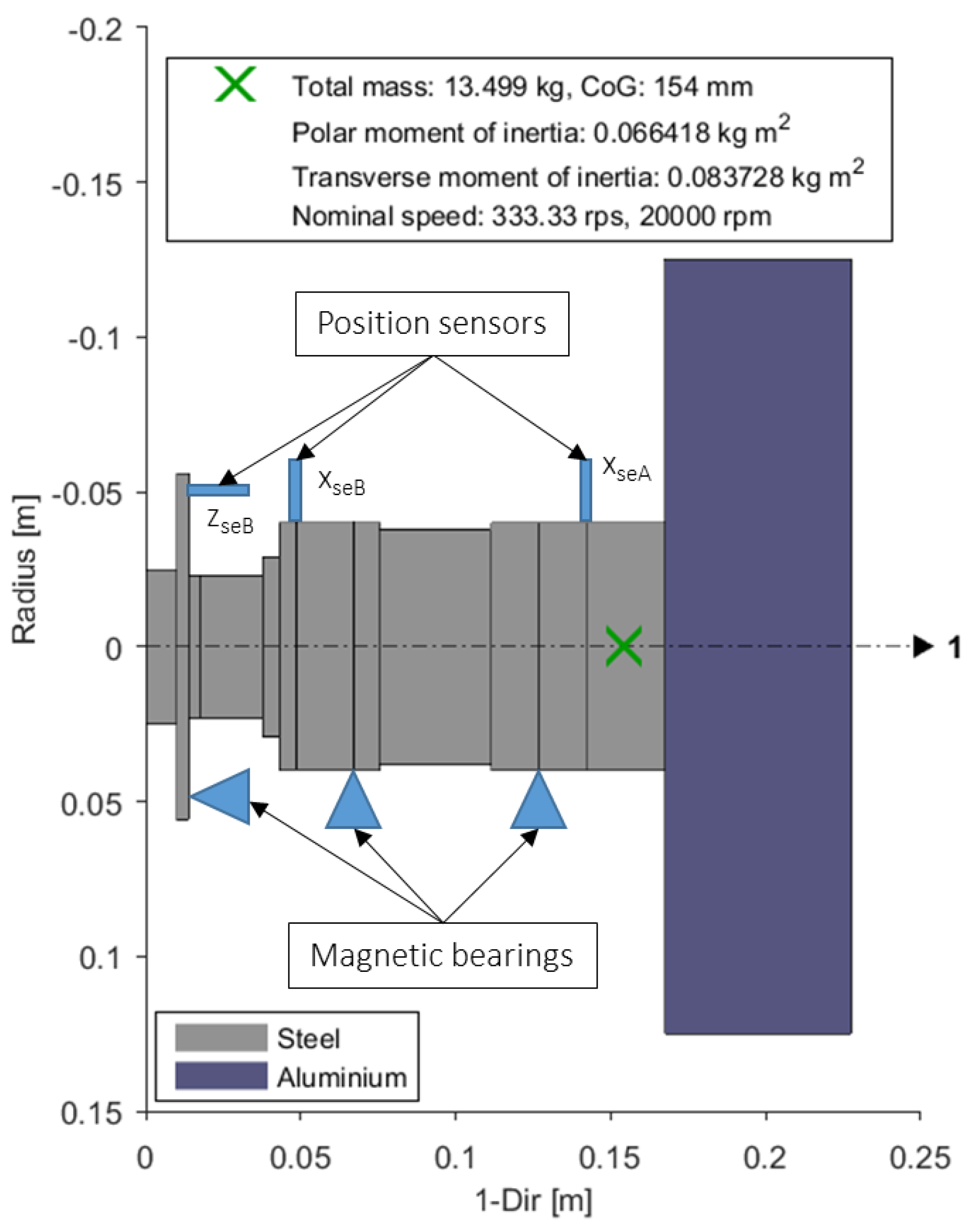
This section shows some experimental results for an industrial system to prove the functionality of the designed control structure. The controller was implemented on a digital signal processor (TMS320DM335) of a state of the art hardware for magnetic bearings. The geometry of the levitated rotor can be seen in
Figure 9. The blade wheel is illustrated using the aluminum part (violet part). For the dynamic simulation, the blade wheel was modeled as a rigid part and was fixed on the flexible rotor using a flexible coupling.
The parameters of the explored system are shown in
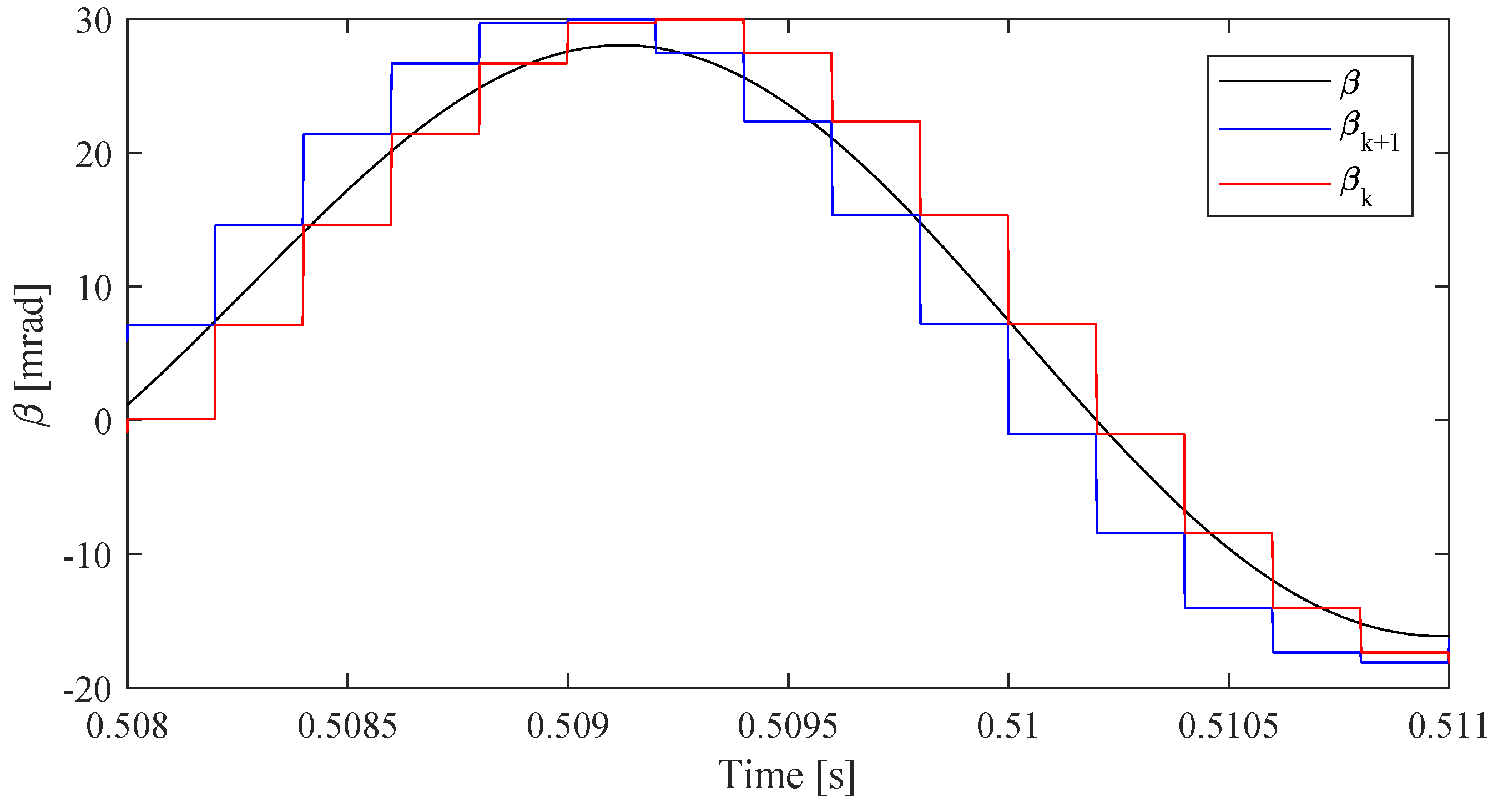
Table 1. The position sensors are inductive sensors, which are excited with a
sinusoidal signal. The actuators used the “differential driving mode” for force generation. The data were recorded using a communication protocol between the DSP and the personal computer. Thus, the signals were identical with the variables from the DSP. For the calculation of the predicted states using the Kalman filter, two control cycles were used. Therefore, the sampling time of the Kalman observer was twice the sampling time of the control structure.
4.1. Switching between Controller Inputs
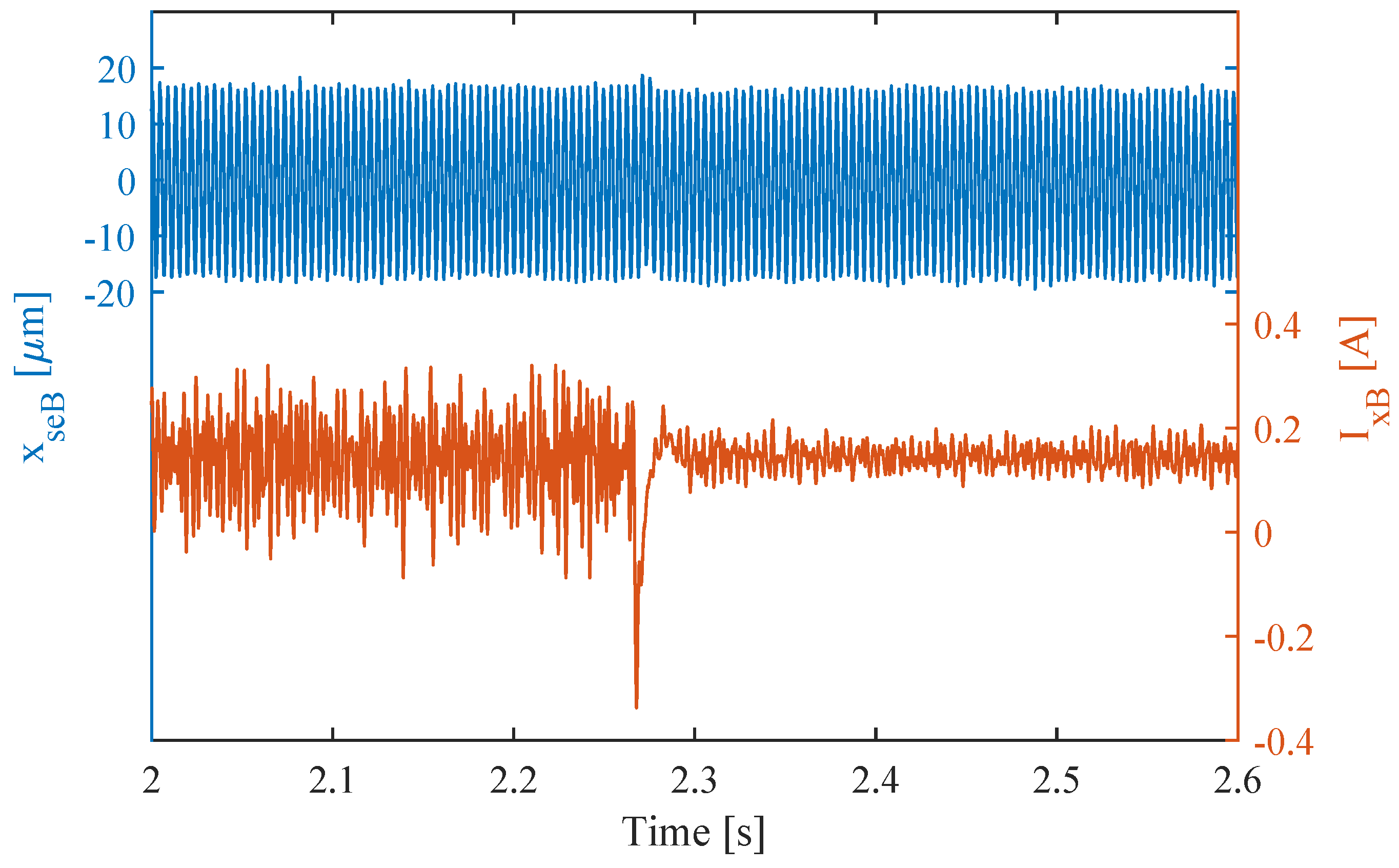
In order to compare the running behavior of the rotor for the estimated tilting coordinates and the sampled coordinates of the sensor signals, the system was investigated around a switching point. The switching point is the time where the input of the controller is changed from the sampled sensor coordinates to the estimated coordinates of the Kalman observer.
Figure 10 shows the signal of the position sensor
and the current
.
The measurement was made at a rotor-speed of about 12,000 rpm. The position signal showed nearly the same behavior for both operations. However, the current signal for the system, which used the sensor directly, had much more noise than the system, which used the predicted variables. For a speed over 12,000 rpm, the system without the predicted states became unstable, because of the high gain in the range of the blade frequencies. Thus, the resonance-frequency caused by the blades was amplified too much, and an unstable feedback system was the consequence. However, for the system that used the predicted states, the gain was low enough that no unstable resonance occurs. Therefore, the rated speed of 24,000 rpm can be reached using the predicted variables as the controller input.
4.2. Dynamic Behavior at Rated Speed
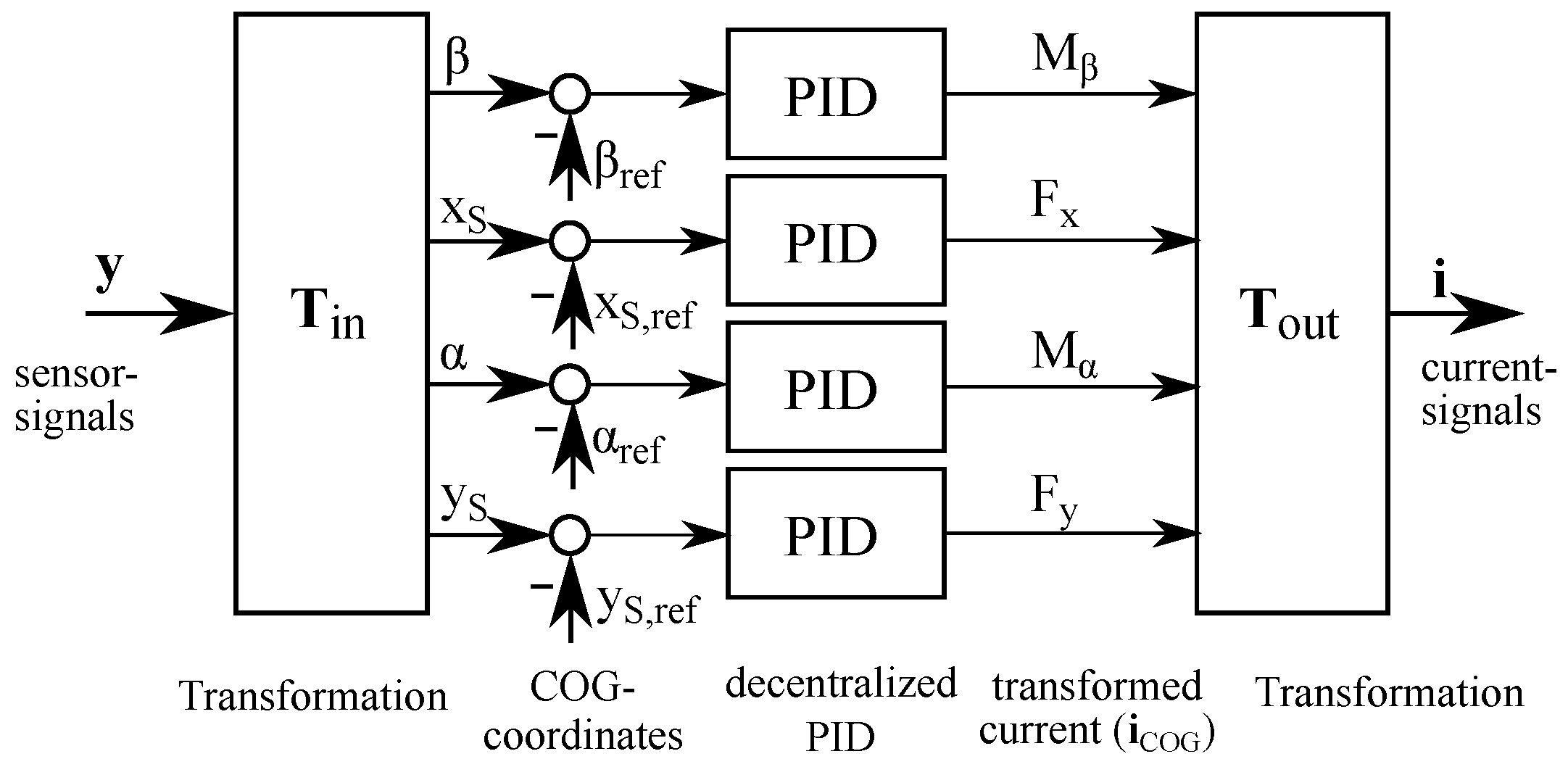
To describe the dynamical behavior and to get a stability measure, the output sensitivity functions
are used. To evaluate
, an excitation
on an output
from the transformed output-vector
of the system was used according to
Figure 6.
can be calculated with:
where FFT means the “fast-Fourier-transformation” of a signal. For an MIMO-system, the sensitivity function becomes a sensitivity matrix. However, according to ISO 14839-3, only the diagonal element of the sensitivity is necessary for the evaluation of the stability. To get a stability measure, the highest peak of the sensitivity function was used. For newly-commissioned magnetically-levitated rotors, the highest peak has to be below a gain of 3 (
). The highest peak of the sensitivity function describes the closest distance to the Nyquist point. This closest distance to the Nyquist point implies also limits in the gain and phase margin [
24]. For the evaluation of the sensitivity functions, the COG coordinates were used instead of the sensor and bearing coordinates. For these coordinates, the sensitivity function can be separated into two tilting, two translation and one axial sensitivity functions. The impact of the gyroscopic effect should only be present in the tilting sensitivity functions. Because the axial movement was a simple SISO-system, only the sensitivity functions of the tilting and translation movements are shown (
Figure 11).
The peak at was caused by the unbalance of the rotor. Thus, this peak was an error in the evaluation of the sensitivity function. Because there was always an output signal independent of the excitation signal, the unbalance peak was not a stability measure of the system. The phase plot of the sensitivity function is not shown, because in order to fulfill the ISO norm, only the magnitude plot is important. The magnetic bearing system had an almost isotropic behavior in the x- and y-direction. Therefore, only one tilting and one translation sensitivity function are shown. The sensitivity functions showed that the ISO 14839-3 was fulfilled. The sensitivity functions for standstill and rated speed showed a similar dynamical behavior. This fact proves the compensation action of the developed control structure.
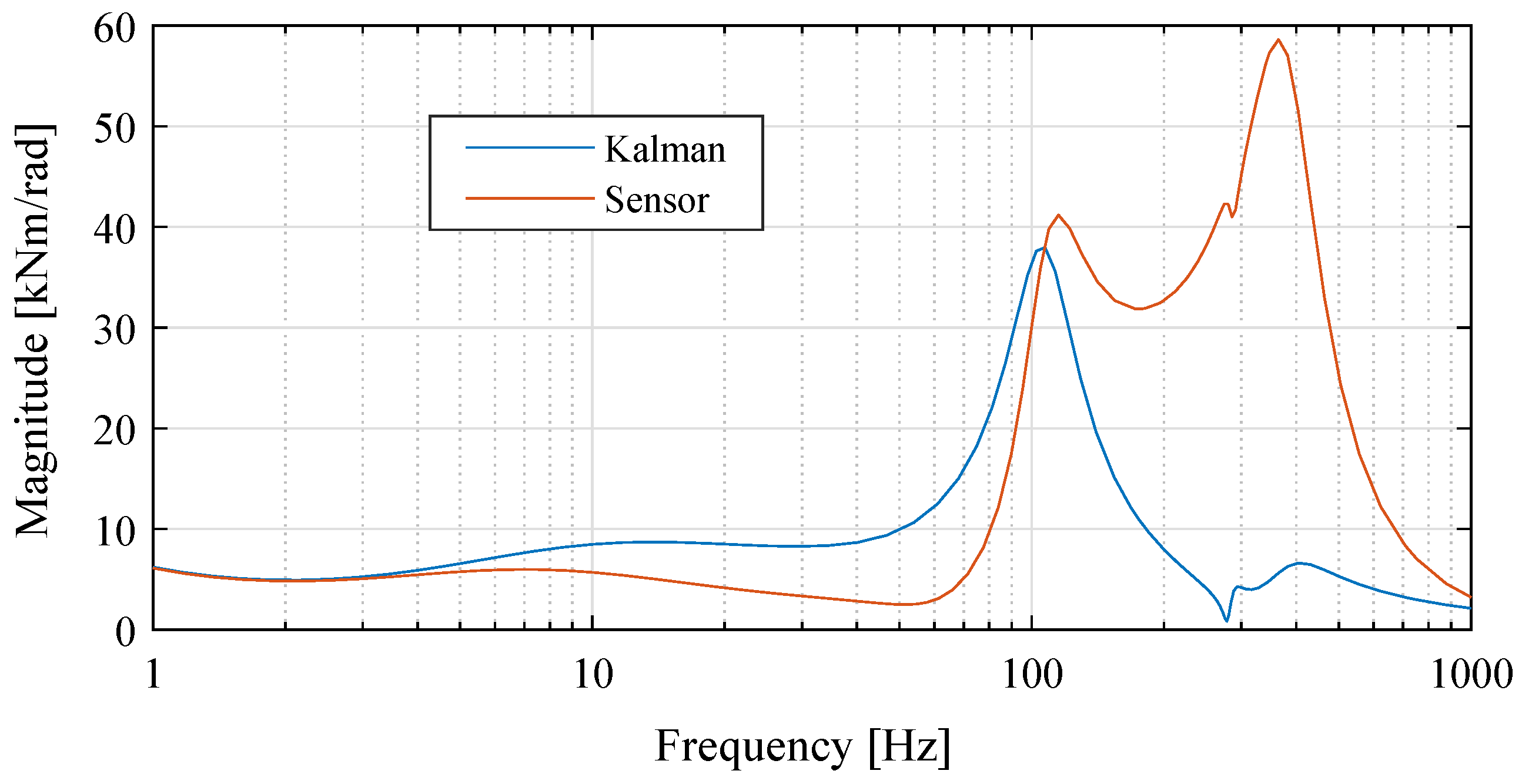
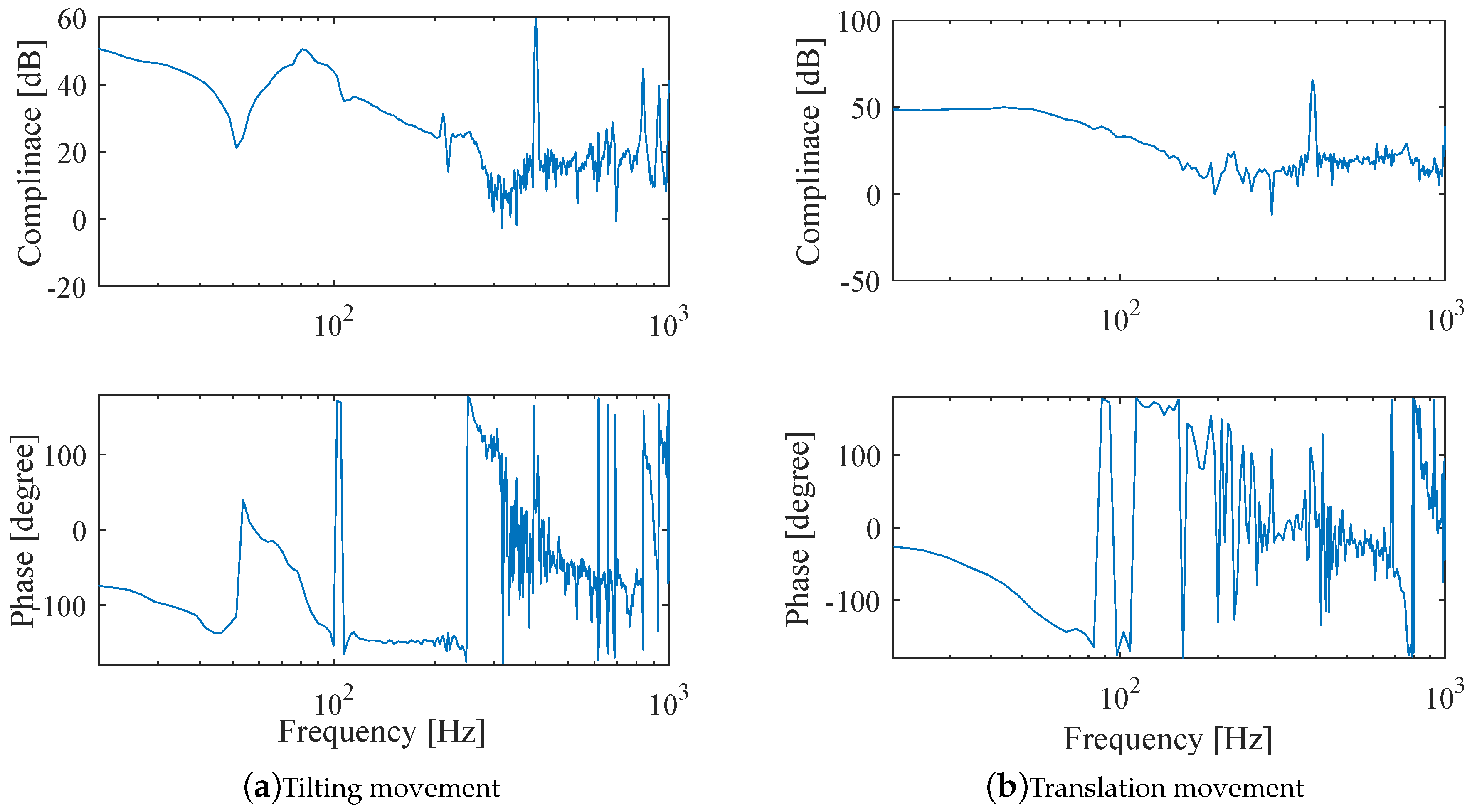
The next measurements deal with the compliance of the AMB-system.
Figure 12 shows the compliance function at rated speed. The compliance functions were also evaluated in the COG coordinates. Thus, one tilting and one translation compliance function were measured. The compliance
was evaluated with:
For the evaluation of the compliance function, the excitation was done at an entry of the transformed input . The values for and are given in , and the values for and are given in m in the DSP.
This choice of the units is the reason for the high gain in the compliance functions. The peak at was again caused by the unbalance frequency. The peaks at around 800 and on the tilting compliance functions showed the forward and backward whirl first bending modes. However, because of the under-critical operation, these bending modes did not cause problems in the running behavior of the rotor. In the range of the blade frequencies, no peak can be detected. Thus, the control structure had almost no effect on the blade frequencies, because of the reduced gain caused by the Kalman observer.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}