1. Introduction
Adhesion between solid bodies plays an important role in nature and technology. Usually, it is strongly suppressed due to the presence of roughness [
1,
2], which exists even for highly polished surfaces. However, when one of the two solid bodies is very compliant and both are smooth, adhesion can become noticeable at relatively large scales and be exploited technologically [
3].
The optimization of adhesive structures can certainly benefit from modeling adhesion, which, however, is not always a trivial task. One difficulty is that adhesion tends to be very short ranged, which leads to stiff differential equations to be solved when describing a structure at a coarse scale. A popular method to avoid singularities and to reduce the stiffness of adhesive contact problem is to use so-called cohesive zone models (CZMs) [
4,
5,
6]. They describe, usually in analytical form, how the traction depends on the local separation between two surfaces. CZMs are commonly stated and used for a given pair of surfaces irrespective of the scale to which the surface is discretized.
Traditionally, CZMs [
7] are constructed in a top-down fashion, i.e., surface energy
and Tabor parameter
, a measure for the range of adhesion, are determined at an intermediate length scale, and the parameters of a given CZM are adjusted such that a desired pull-off stress is produced. It was shown for adhesive Hertzian contacts that details of the functional form of CZM’s do not significantly affect how contact area and displacement and thus the pull-off stress change as a function of normal load, as long as
and
are matched [
8].
Only few attempts have been made so far to construct CZMs from the bottom up [
9,
10]. This includes the systematic elimination of small-scale random roughness features leading to a reduction of surface energies and an increase in the interaction range with respect to the interatomic potentials [
11,
12]. While the stiffness of the mathematical problem is certainly substantially alleviated by such coarse graining for most nominally plane surfaces, the traction laws to be used may remain rather short ranged for adhesive system, for which random roughness does not substantially reduce the surface energy below the typical values of
mJ/m
2. The desirable coarse of action may then remain to model adhesion as being as short-ranged as needed but as long-ranged as possible.
Using CZMs that reflect the microscopic short range of adhesion realistically either requires a fine discretization or induces unrealistic force-displacement dependencies [
13]. When the grid is not sufficiently fine, jump-in or snap-out dynamics usually suffer from unacceptably large errors, e.g., the pull-off force and work of separation can be largely overestimated [
14]. A frequent solution to this problem is a mesh refinement in the zone of interest, which, however, implies a low computational efficiency. Unfortunately, there does not appear to be a generally accepted or well tested rule for how to best select the mesh. When it cannot be made very fine, the most common way to proceed is to reduce the surface energy, whereby realistic traction forces [
4,
15,
16,
17,
18,
19,
20] can be obtained. However, it is doubtful that this is the best course of action, since the simulation of dynamical processes requires the total energy balance to be accurate and not only the traction at the contact edges. Underestimating surface energy in the contact region, where the mesh is coarse, destroys that balance.
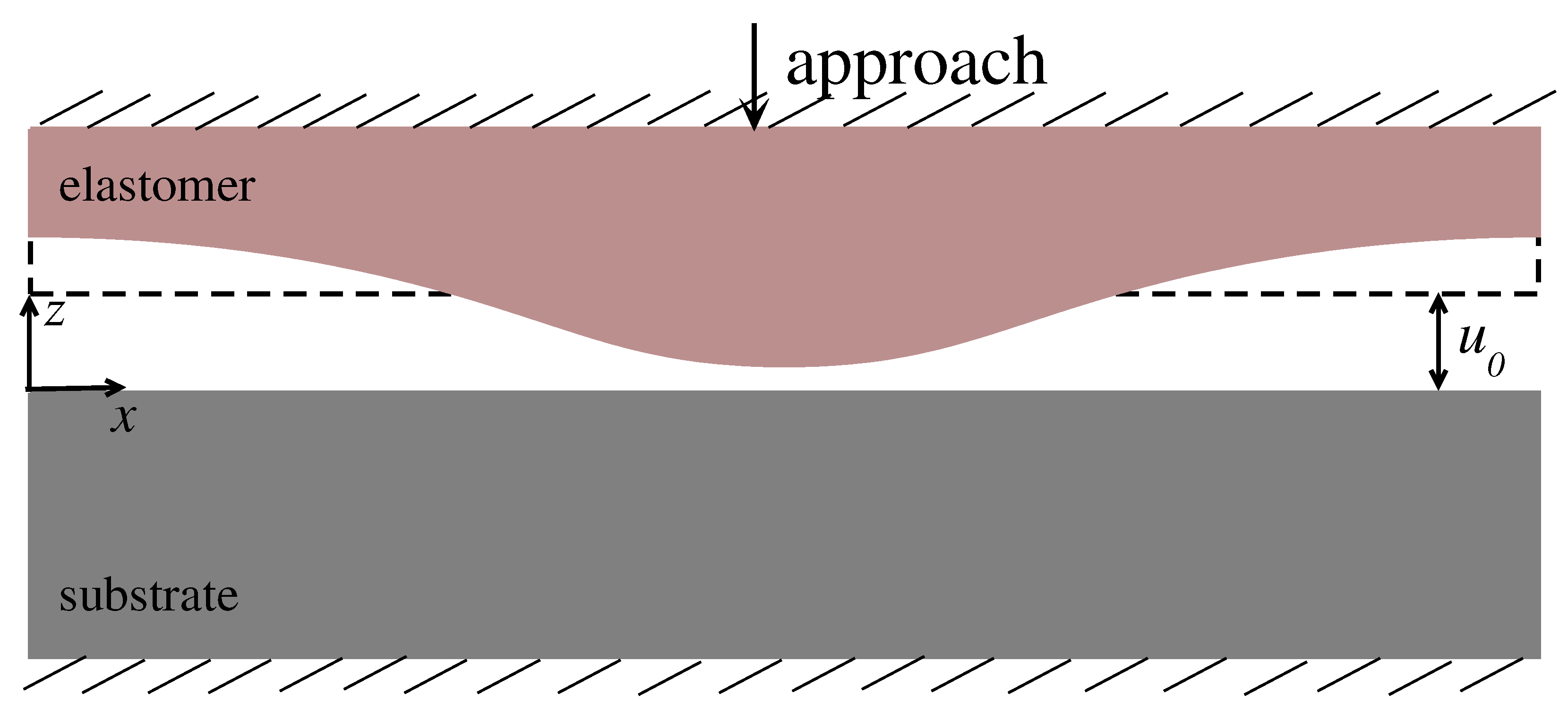
In this work, we propose a rule for how to select the mesh size for a given CZM, and more importantly, we provide a recipe for how to redesign it such that it provides accurate force-displacement dependencies if the mesh size cannot be made arbitrarily small. Towards this end, we focus on the case of a smooth flat elastomer in contact with a rigid, flat, smooth indenter with adhesive interaction as the most basic model. A central goal is to construct a CZM in which the energy hysteresis occurring in a compression-decompression loop are as accurate as possible. Much of the underlying analysis re-investigates the question how, or, rather when originally flat, soft-matter surfaces become unstable on approach to a flat adhesive counterface before making contact [
21,
22]. This in turn brings us to another issue, which has been discussed surprisingly little, namely, whether a CZM reproduces not only retraction but also approach realistically.
It is easily found, as in this contribution, that a Tabor parameter of
is sufficiently large to produce a load-displacement curve in contact similar to that obtained in the limit of infinitesimally short-range adhesion, which was solved by Johnson, Kendall, and Robertson (JKR) [
23]. However, the approach is scarcely ever explored, although it is decisive for the unavoidable hysteresis that ensues as a consequence of the difference between the approach and the retraction curve. In a study addressing a full approach and retraction cycle of an adhesive Hertzian indenter, Ciavarella et al. [
24] found that the energy loss is substantially reduced by finite Tabor parameters
compared to the idealized case of zero-range adhesion, e.g., for
by almost a factor of two and by still
for a Tabor parameter as large as
. This latter value would be characteristic of a soft-matter interface with the following order-of-magnitude specifications: local radius of curvature of 100 nm, surface energy of 100 mJ/m
2, interaction range 4 Å, and a contact modulus
of 10 MPa. Based on this ballpark estimate, it appears as if most soft-matter systems are locally sticky, even if typical surface roughness at large wavelength destroys that stickiness at macroscopic scales [
11,
25,
26]. Rather than simulating such interfaces with
, it might be desirable to run simulations with much smaller
and to extrapolate to the desired
, which may often be approximated as infinity. While Ref. [
24] certainly contains implicitly a recipe for this interpolation, it is neither explicitly stated nor is it clear if it extends to geometries beyond parabolic tips. Thus, one purpose of this work is to explore how to extrapolate numerical results for adhesive losses to short ranges.
The reminder of this paper is organized as follows: The model and the computational method are presented in
Section 2.
Section 3 contains analytical and numerical approaches to the contact between two adhesive, originally flat adhesive surfaces, including a guideline for the construction of scale-dependent CZMs. While none of the analytical results might be new, we obtain them from “first-principles” without making direct use of linear fracture mechanics. The guidelines identified for smooth surfaces are then applied to uneven indenters in
Section 4. Conclusions are drawn in the final
Section 5.
3. Patterns and Instabilities in Periodically Repeated,
Flat, Adhesive Contacts
Adhesion is known to lead to instabilities when two surfaces approach each other. The arguably simplest description of an adhesive instability was proposed by Tomlinson [
37], who assumed atoms to be bonded to their lattice sites by springs of stiffness
k. As a surface atom approaches a counterface, the position of the atom becomes unstable when the negative curvature of the atom-surface interaction exceeds
k, in which case, the atom jumps into contact. On retraction, the inverse jump occurs at an increased separation between the equilibrium site and the counter surface, so that hysteresis and thus energy dissipation results.
It is now well known that Tomlinson’s model is not sufficiently refined to describe adhesive hysteresis. Its simplest valid description was proposed by Johnson, Kendall, and Robertson (JKR) [
23]. In their solution of short-range adhesion in Hertzian contact geometries, jump to contact occurs at a zero load, but breaking the same contact on retraction requires the tensile load and the work of adhesion to be finite.
In a tribological context, surprisingly little attention has been paid to flat, adhesive interfaces, unless they are nominally flat, with true contact occurring only in isolated patches [
38,
39,
40,
41]. For surfaces in which microscopic roughness is not significant, previous studies [
42,
43] reveal that adhesive instabilities are easily triggered in the presence of a cohesive traction law, as to be expected from the JKR model in the limit of infinite radii of curvature. Yet, little has been reported on the jump into and snap out of contact for ideally flat adhesive surfaces, in particular when assuming periodic boundary conditions. In this section, we will be concerned with this question, not only for academic reasons (periodic boundary conditions do not exist in reality), but because this analysis gives clear cues on how to select mesh sizes and how to meaningfully modify CZMs when the mesh size cannot be made arbitrarily small. Towards this end, we use typical energy balance arguments, as originally done by Griffith [
44] in the context of cracks and later by Maugis and Barquins [
45] in the context of peeling, to describe the force-stress relations in certain asymptotic limits, while simulations are needed to properly describe those relations near instability points.
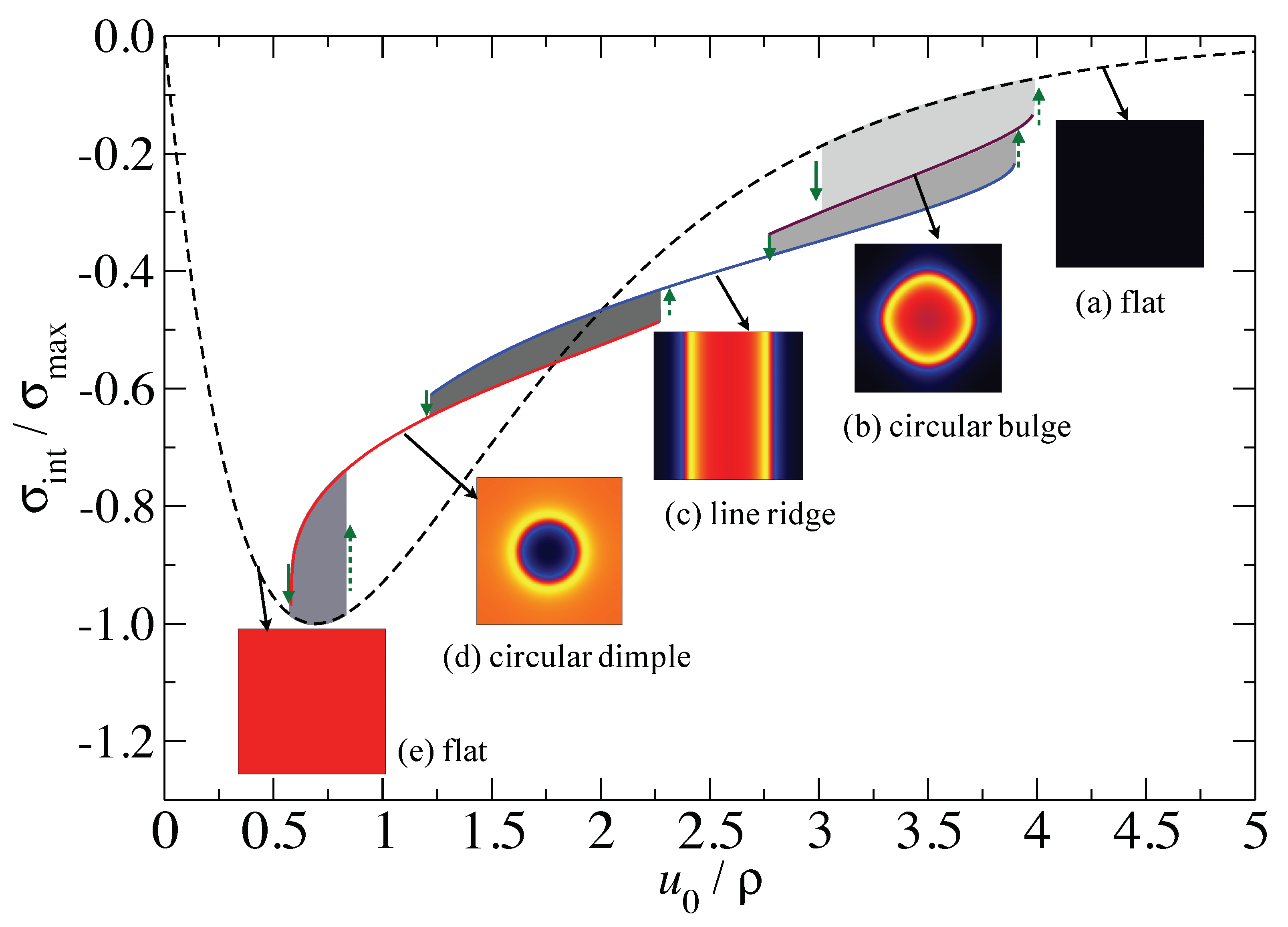
Figure 2 shows the stress-displacement relation for a contact described by the two dimensionless numbers
and
along with patterns—as defined by the topography of the elastomer’s surface—that arise as stable or metastable solutions. At very large separation, ideally flat surfaces are stable as shown in the inset (a) of
Figure 2. When approaching the indenter, the flat configuration becomes suddenly unstable, and a circular bulge, see inset (b), is formed. Upon further reduction of the mean gap, the bulge turns into a line ridge, depicted in inset (c). Next, the ridge develops into a dimple, as shown in inset (d). Finally, the elastomer’s surface flattens out again at close approach as revealed in inset (e).
All transitions shown in
Figure 2 are reversible, but discontinuous and thus hysteretic: upon retraction of the elastomer, the patterns reverse, however, at a larger mean gap than during contact formation. The areas between approach and retraction curve in the stress-displacement relation corresponds to the dissipated surface energy. In contrast to ordinary visco-elastic losses, the lost energy depends very weakly on the velocity
at small
, see also Refs. [
41,
46,
47] linking adhesive losses to (small-scale) instabilities rather than to visco-elastic effects. Since our simulations are thermostatted to a very small temperature, a minor logarithmic rate dependence of the lost energy with tiny prefactors is obtained.
Note that the patterns shown in the insets of
Figure 2 occurred at random locations of the simulation cell. However, they were moved to the center of the graphs for aesthetic reasons. Note also that the line ridge is formed parallel to
x with the same probability as to
y, however, it was never observed to form along the diagonal. To represent ridges consistently, we represented them parallel to
y.
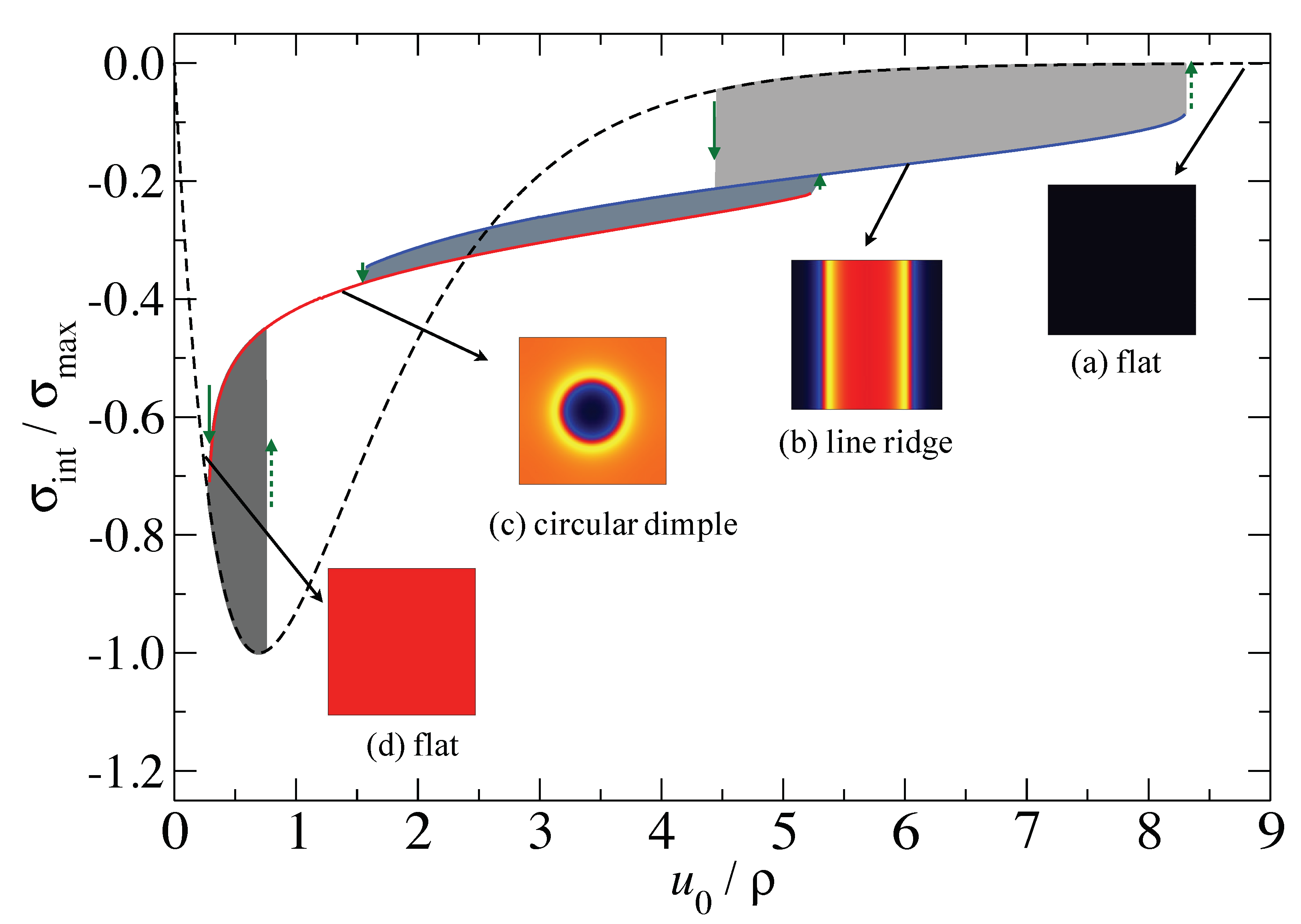
Figure 3 depicts the approach-retraction curve for a system, in which
was kept the same as before, but
L was increased to
, i.e., to four times the linear dimension of the system represented in
Figure 2.
While surface patterns and instabilities show similarities for the two different system sizes, notable differences can be observed: in the larger system, the circular bulge has disappeared and instabilities span a broader range in the interfacial displacement than before. In addition, the energy hysteresis per unit area, , has grown by a factor close to 4, which means that the total lost energy is still far from a linear scaling with system size for the used appropriate dimensionless numbers describing our system.
In the remaining part of this section, we attempt to rationalize and to quantify the differences for the different system sizes. This is done by two means, first by exploring a harmonic approximation around the stable or metastable, undeformed elastomer. This analysis provides a first guideline for how to set the minimum value for the range of adhesion in a cohesive-zone model-based (peeling) simulation. Second, an energy analysis of the characteristic defect pattern is performed similarly to the traditional Griffith analysis. Ref. [
23], however, adopted to periodically repeated domains. As a word of honesty, we must confess that we cannot fully judge to what extent Griffith theory of brittle fracture is simply “reinvented” in some of the following calculations, as we even find text books on that matter somewhat difficult to follow. If it is a reinvention, we hope to have provided an alternative derivation, which is easier to digest than common treatments of that matter, in particular because our treatment is based entirely on the (Fourier) stress-strain relation and does not necessitate any prior knowledge of linear fracture mechanics.
Before proceeding to the theoretical analysis, a few words of clarifications might still be in place. First, it is important to note that controlling the center-of-mass of the layer facing the indenter is impractical experimentally, due to the finite (combined) compliance of the elastomer and the loading apparatus. However, to know the (possible values or range of values of the) traction at a given separation between two (coarse-grained) surface elements, we need to constrain their fully resolved structure at that separation. This why we opted not to run our simulations in a force-controlled fashion. Second, much of what is done in the remaining theoretical section relates to existing literature on configurational instabilities occurring during contact formation [
21,
22] or delamination [
48]. However, we felt the need to have a coherent description of the various patterns, which is adopted to the surface interactions assumed in this work. At the same time, we explore immediately what can be learned from this analysis for (a) the construction of CZMs and (b) the correction of energy hysteresis from simulations using relatively long-range CZMs to short-ranged CZMs. Last but not least, analyzing how the choice of
affects the result often addresses two questions at the same time. (a) Is
an appropriate choice under the assumption that we aim to model short-range adhesion? (b) How does the range of adhesion affect the system? In this sense, the circular bulge pattern observed in the small simulation cell can be said to have arisen as an artifact or as a consequence of finite-range adhesion.
3.1. Harmonic Approximation
At mean gaps, where an undeformed surface is the only stable solution, any deviation of the function
from
is counteracted at fixed
by a restoring force. For small perturbations,
and therefore also
can then be expanded as a second-order Taylor series in the displacement, so that the total excess energy w.r.t. a flat surface reads
Thus, when
is negative, the harmonic approximation cannot be maintained if there exists a non-zero wave vector whose magnitude is less than the critical wave number
In other words, if the linear dimension of a periodically repeated cell exceeds a critical length
the surface will deform spontaneously in response to a tiny perturbation of appropriate symmetry.
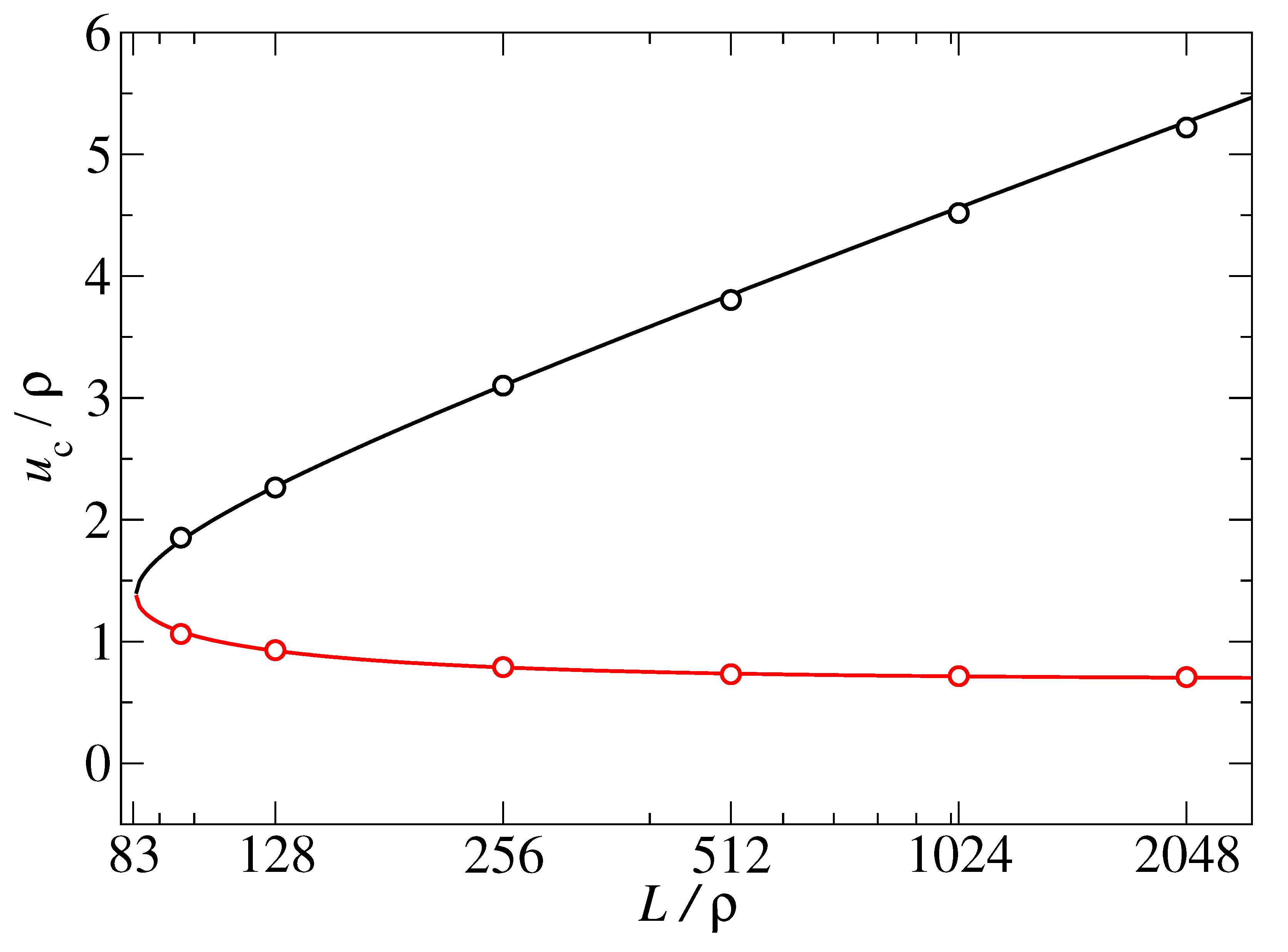
For fixed system size, two critical separations (may) result. For the used Morse potential, these can be evaluated to
Thus, for linear system sizes less than the critical size
, the undeformed surface can remain (meta) stable at any separation and instabilities can be avoided, even if configurations with lower potential energy may exist.
Figure 4 confirms that the just-made analytical calculations are consistent with the results of GFMD simulations.
3.1.1. Scale-Dependent Cohesive Zone Models
How do the just-obtained results relate to the construction of cohesive-zone models? Assume that a system is discretized to an in-plane linear dimension of
. If
were much less than the critical value below which a periodically repeated cell of length
adopts internal defects, then a proper representation of the defect structure (e.g., a peeling front) cannot be represented. Subsequently, the energy required for the peeling process would be much too large. If, however,
were much in excess of the critical value, then the adhesion would become long ranged and potentially too long-ranged for a given purpose, e.g., if a system had (microscopic) roughness, or the tape to be peeled were very thin. In that case, the force required to peel the system might be underestimated. This means that the optimum choice for the mesh size, or, alternatively, the choice of the optimum range of interaction, should satisfy
in the case of Morse potential.
For a general CZM, the just-proposed criterion could also be formulated as
where
should be a constant of order unity. The precise optimum value for
will depend on the specific functional form of the CZM, however, we do not expect a great sensitivity for reasonable choices. In the case of the Morse potential, Equation (10) translates (back) to
3.2. Griffith-Based, Continuum Approach
In this section, we identify some traction-displacement relations for mechanically stable or meta-stable, non-constant displacement fields. Thus, we attempt to minimize the total energy
with respect to the displacement field, which contains an “external energy”
in addition to the elastic and interaction energies, which have already been introduced.
is the energy gained in response to an external load, including gravitational loads, i.e.,
where the external pressure
plays the role of a Lagrange parameter, which is adjusted such that the desired mean displacement
is an extremum of the total energy. The pressure
p exerted from the indenter has the opposite sign of
, but is equal in magnitude.
In order to proceed analytically, adhesion is considered to be infinitesimally short-ranged, so that
where
is the real contact area.
In the following treatment, we will minimize the total energy per area. A lower-case letter v (with varying indices, i.e., ela, ext, int, and tot) will indicate that the pertinent energy is re-expressed as a surface energy density. Moreover, a periodically repeated square domain of length L will be assumed.
Since elasticity is a scale-free theory, in which energy increases quadratically with the displacement, and adhesion is considered to be infinitesimally short ranged, the mean total energy density of a given defect pattern must be of the form
where
is the linear dimension of the non-contact with
so that
would be, for example, the diameter of a dimple, Moreover,
is a dimensionless function of
, while
denotes the relative contact area, i.e.,
where
is the linear dimension of a contact patch in units of
L.
The non-trivial part of the calculation is the determination of the function . Asymptotic analytical solutions for some defect patterns are derived in the appendix for and . They can also be determined numerically in adhesion-free simulations, as described further below. For the moment, we simply assume the function to exist and to be differentiable.
For any stable solution, both
and
must minimize the mean energy density, which is why the partial derivatives of
with respect to these two variables must be equal to zero. Thus,
in mechanical equilibrium. A consequence of Equation (17) is the existence of a maximum (or minimum) displacement
if the l.h.s. of Equation (17) has a minimum (or maximum).
Defining
such that
and inserting the resulting value of
into Equation (18) yields
after expanding the fraction with
. Here, we used
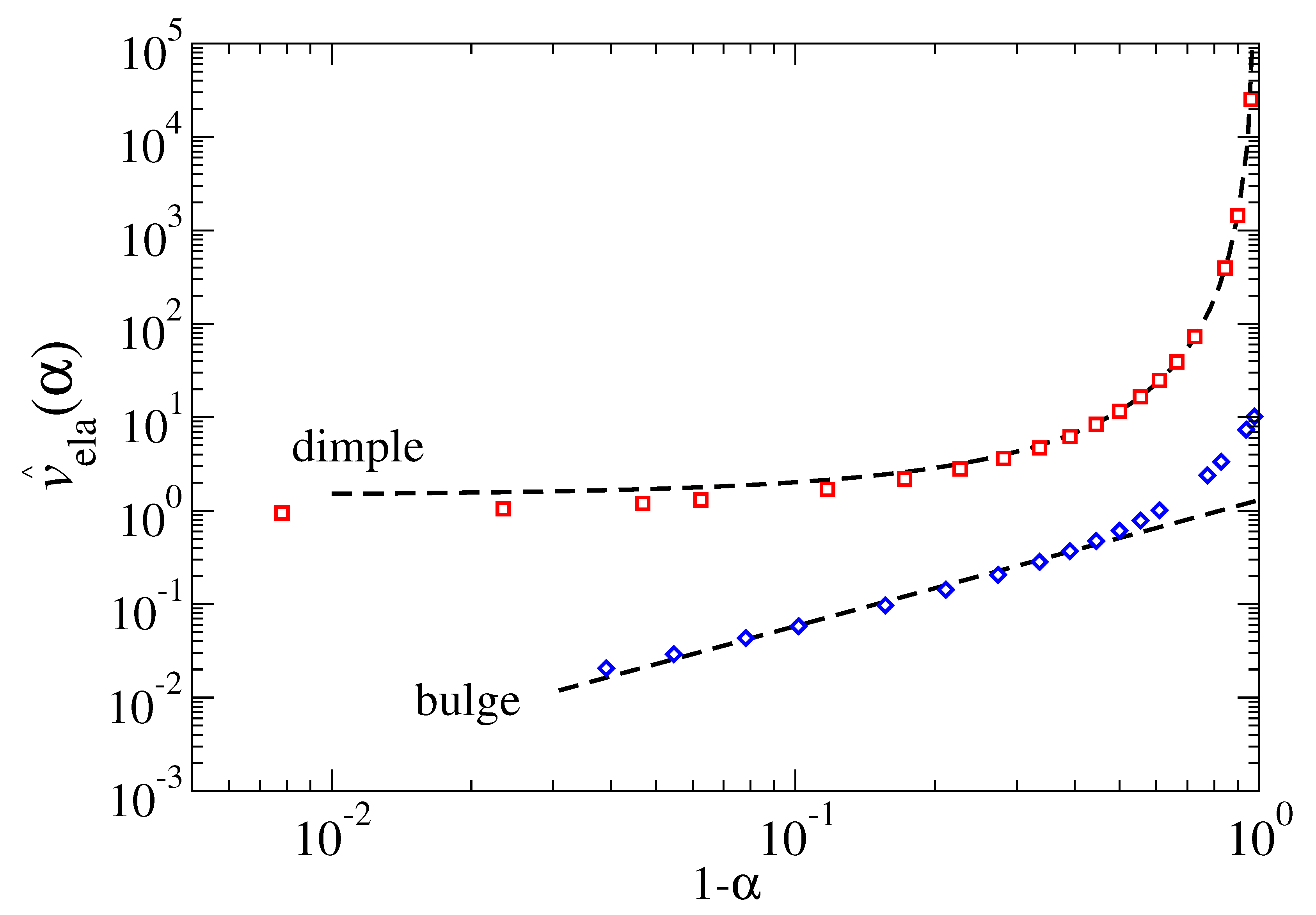
Thus, for any defect pattern, there is a unique shape of the dependence in the continuum limit, which is obtained by expressing in units of and p in units of .
The most important missing ingredient to identify the stress-displacement relation summarized in Equation (19) is the determination of the dimensionless function . For its numerical determination, we proceeded as follows: For a given defect pattern and a given fixed value of , contact points were defined and constrained to a zero displacement. The energy is minimized with respect to the unconstrained displacement field under a given external pressure . In the last step, and are determined from . This was done for different discretizations, which allowed us to perform a Richardson extrapolation of the two observables of interest to the continuum limit for each value of .
In the remaining part of this section, we will present our numerical results on and compare them to asymptotic results wherever appropriate, as well as with simulation results that were obtained with finite-range adhesion. Since an accurate determination of turned out to be very labor intensive, we decided to abstain from this exercise for now.
3.2.1. Line Ridge
The line ridge is considered first and with a greater level of detail than the other patterns, since it allows peeling to be studied in the most straightforward fashion. Periodic boundary condition makes the simulation cell have two peeling fronts, which are mirror images of each other.
Two possible asymptotic limits arise, namely a thick ridge with a localized “line crack” as defect pattern for
and a thin contact ridge for
approaching unity from below as closely as possible. For each limit, it is possible to identify a closed-form analytical expression for
:
with
. These two expressions are derived in
Appendix A.1 and
Appendix A.2.
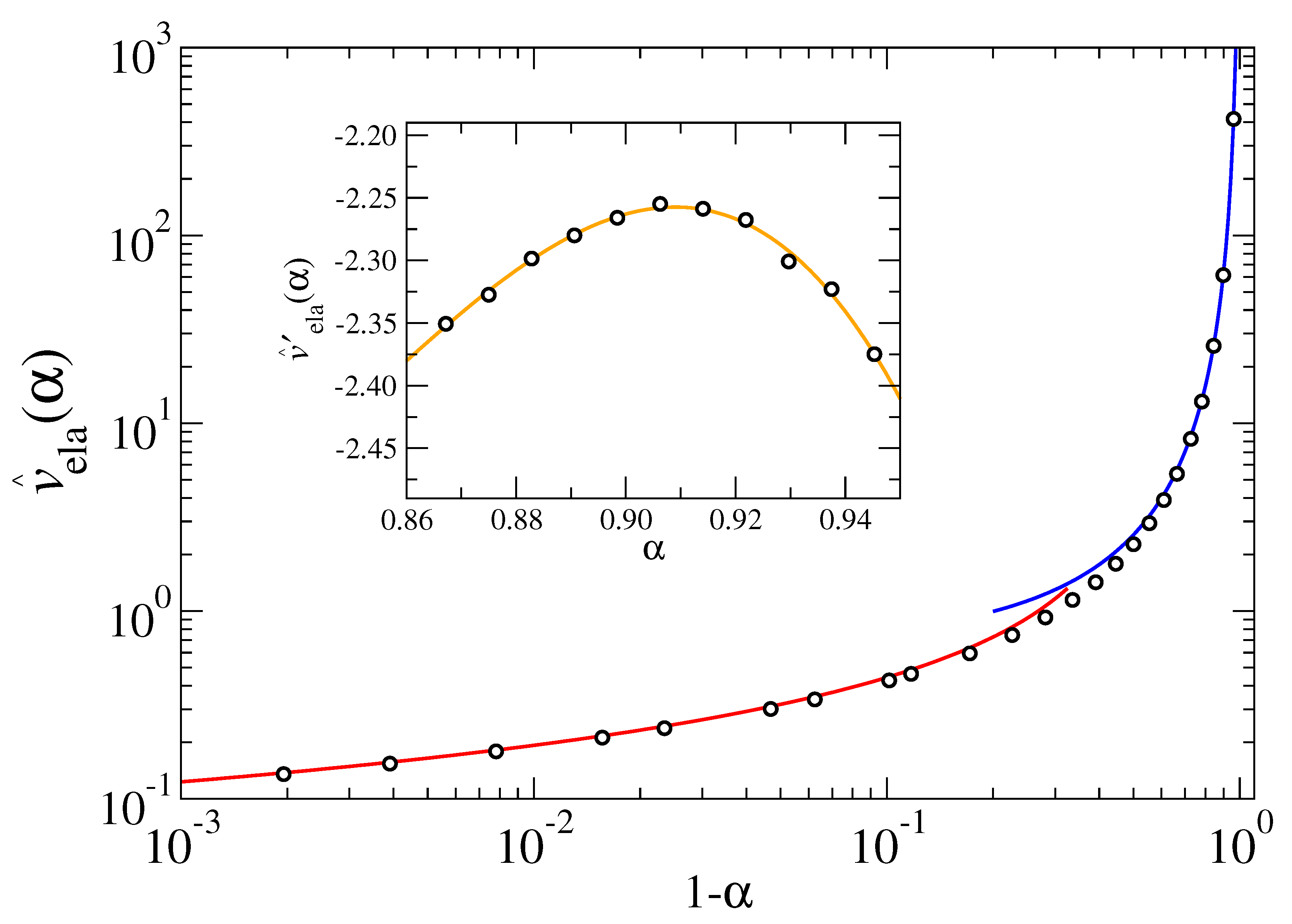
Figure 5 reveals that the analytical results for
are consistent with GFMD data.
As mentioned before,
has extrema (and thus end points) when the l.h.s. of Equation (17) has an extremum. Since
for a line ridge, an endpoint of
coincides with an extremum in
. Since
is monotonic at small
, no unstable point exists in the continuum solution for thick line ridges. Thus, the instabilities in the GFMD simulations toward the formation of dimples can only have arisen due to adhesion having been modeled with a finite range. The power-law relation
is easily deduced in the
thick-ridge limit, which turns out to be quite accurate even up to
, as evidenced in
Figure 6.
In contrast to the thick-line-ridge limit, the thin-line-ridge asymptote does have a critical value , at which has zero curvature. It is located at . Although the thick-line-ridge limit appears to match quite well, it fails to produce a truly satisfactory dependence, because the first and the second derivative are not quite as accurate as itself.
In order to obtain a more precise estimate for the asymptotic thin-ridge behavior before the instability to flattening, GFMD calculations of the reduced elastic energy were refined in the vicinity of
. The following results were deduced, which allow that “critical behavior” to be characterized:
,
,
, and
. Thus, near the flattening transition, Equation (17) reads
in leading order, which can be easily solved for
. Just before the flattening instability, a critical separation of
is reached.
The final analytical step is to insert the two analytical
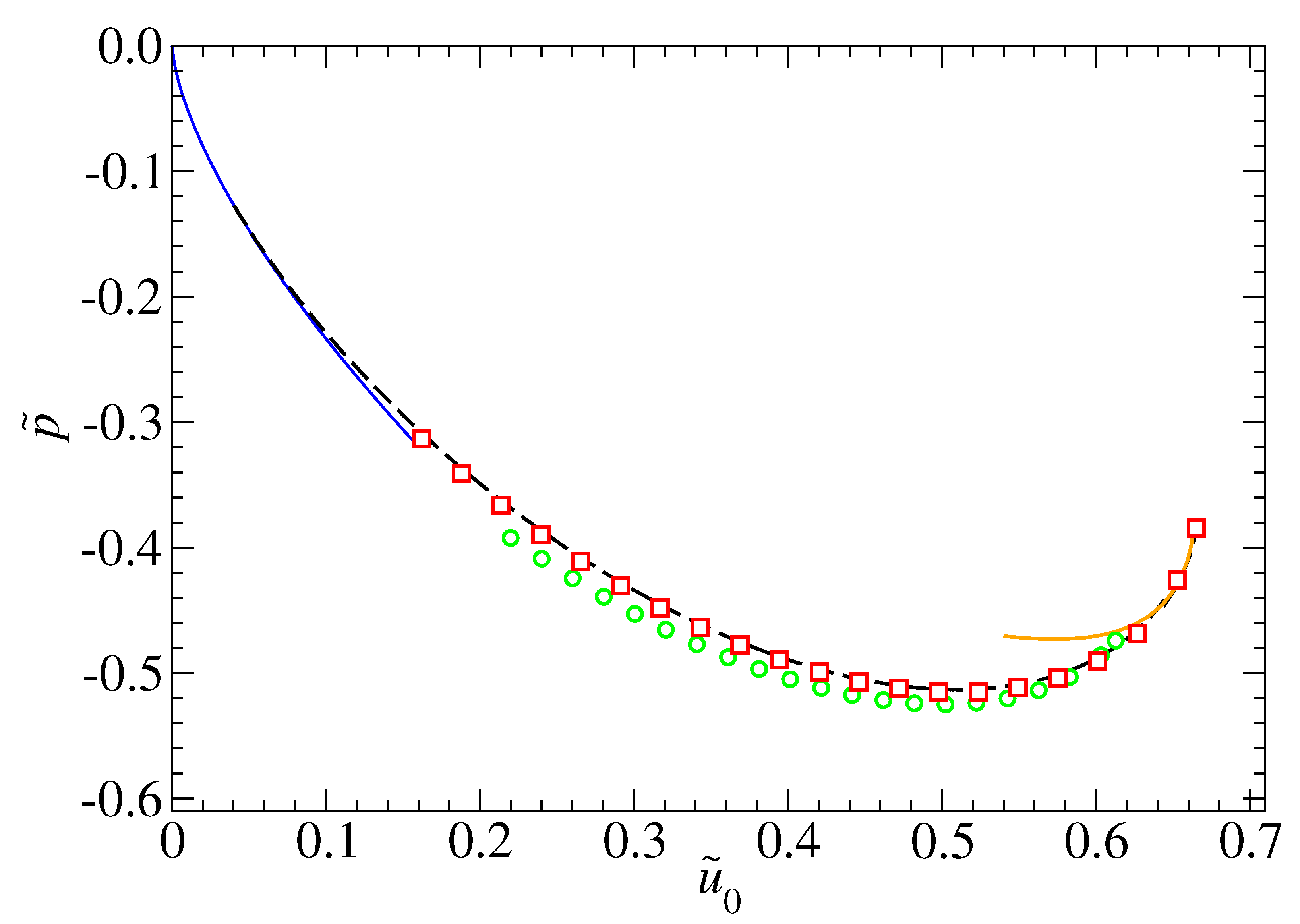
dependencies into Equation (18). In the thick-line-ridge limit, this yields
which reads
in reduced variables. In the thin-line-limit, we obtain in leading order
with
and
.
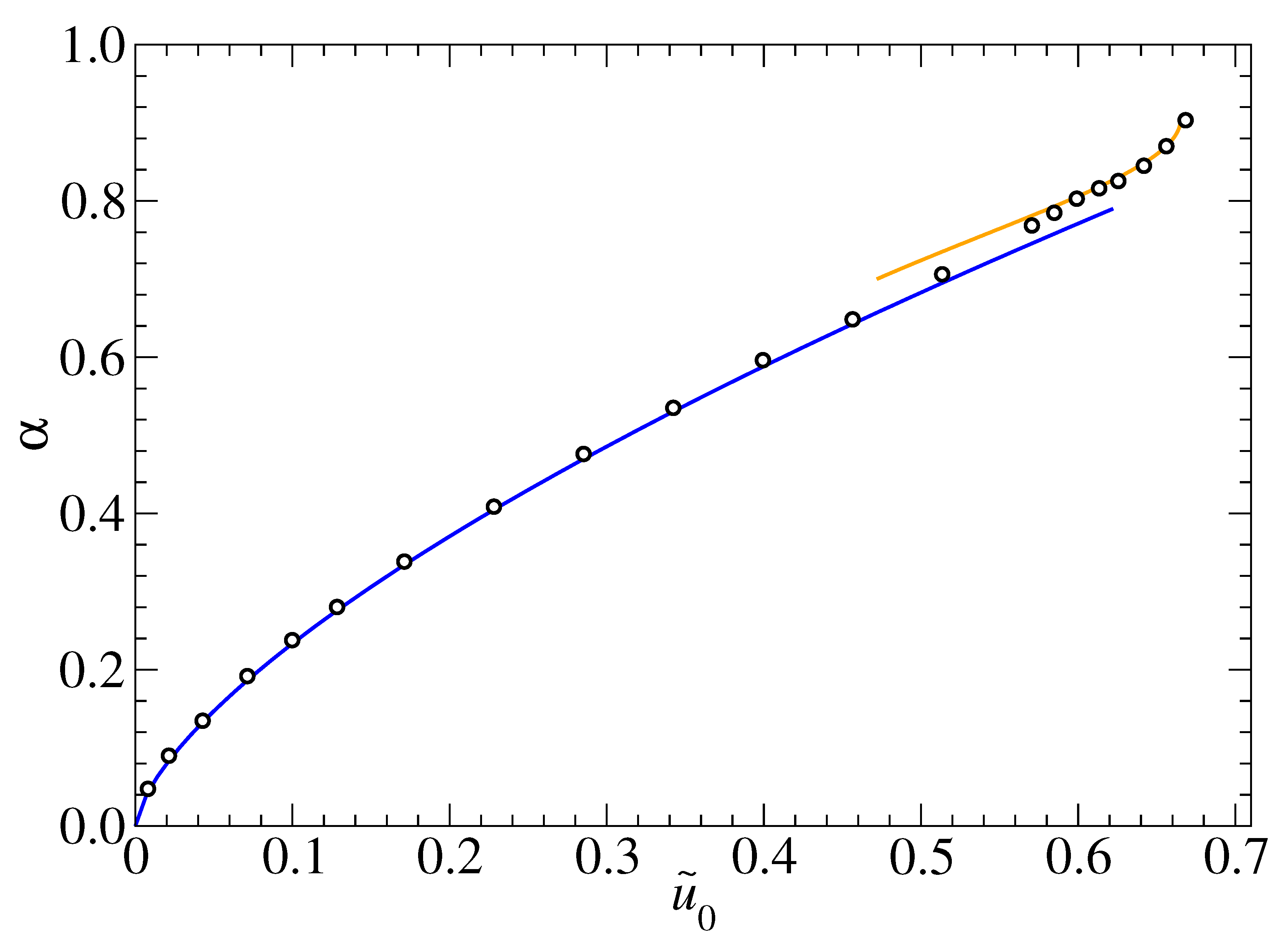
Figure 7 reveals the correctness of our analysis. The larger system with fixed finite-range adhesion reproduces the continuum solution more closely than the smaller system. This includes a closer approximation of the end-points.
The continuum solution shown in
Figure 7 is an overlapping superposition (conglomerate) of three different approaches: On
and on
the thick-line-ridge asymptotic solution and the expansion about the flattening point are depicted, respectively. In addition, the GFMD data presented in
Figure 5 were processed numerically to yield results on
. It agrees with the two shown approximations within line widths in the shown overlapping domains.
We now turn our attention back to a computational question central to this study. How can we design a CZM such that it reproduces the
relation for zero-range adhesion as accurately as possible for a given, fixed number of grid points? In
Section 3.1.1, a scaling relation was proposed towards this end, which is tested next.
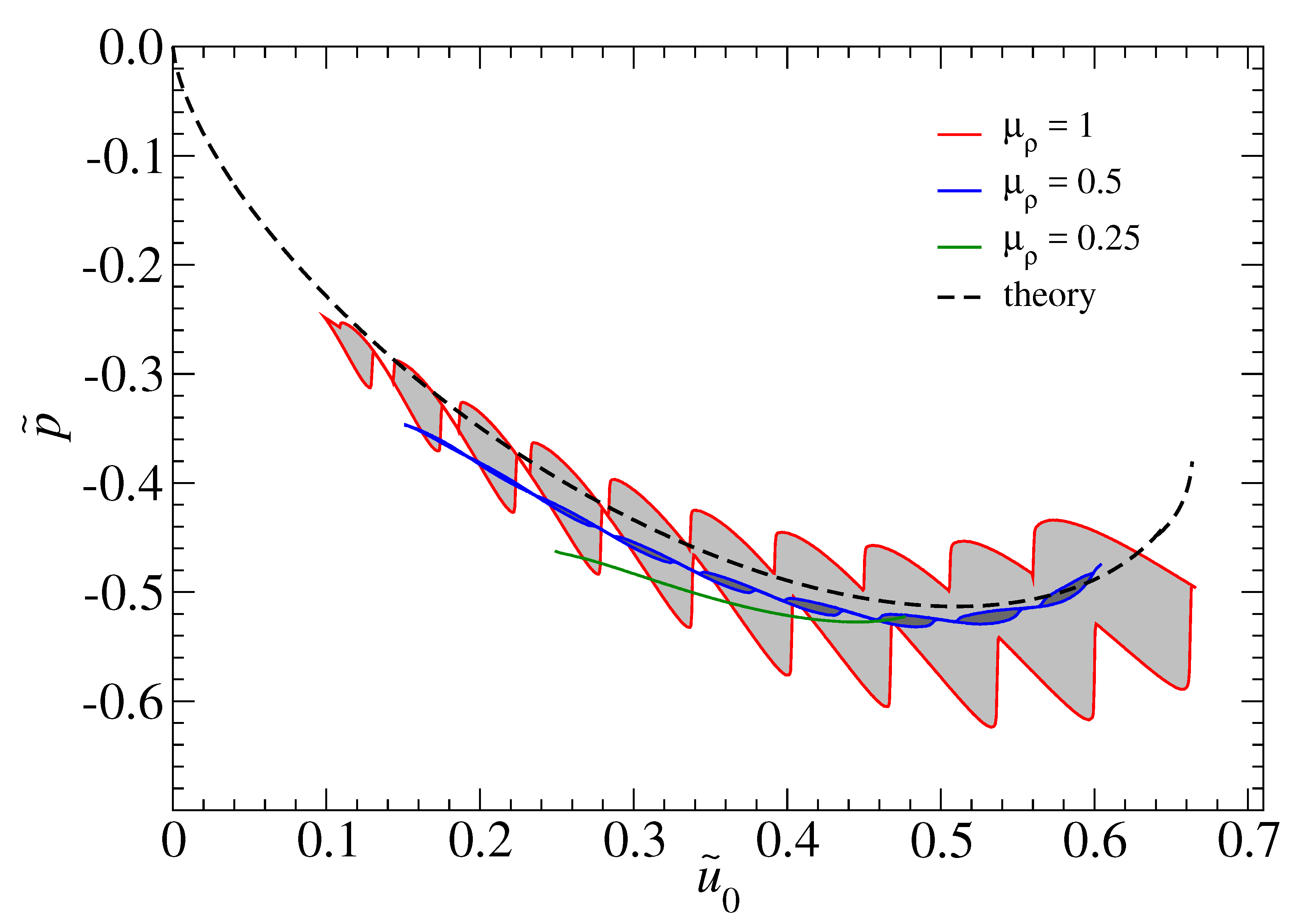
Figure 8 reveals that using
induces instabilities and thus hysteresis on the
curve, which do not exist in the continuum solution and which would disappear if
was kept constant but the mesh was refined. For
, instabilities disappear but only a relatively small part of the line-ridge solution is stable for the given discretization of
.
Despite visible discrepancies, the agreement between the exact solution and the one obtained for
can be called surprisingly good, because the discretization of the simulation cell into
elements disposes only of eight independent, i.e., symmetry-unrelated points to describe contact plus non-contact. They both have fields (stress and derivative of displacement) that cannot be Taylor expanded upon. This makes a total of four fields, which are numerically difficult to integrate, because the simulation cell contains two peeling processes, plus the zones in between the diverging fields. Their combined effect is reflected by merely 16 grid points. Anyone having applied numerical integration schemes to such “poorly behaved” functions will thus certainly appreciate the “performance” of the
,
simulation. Specifically, for
, the line ridge becomes unstable to flattening at
for a thick ridge (dimples were suppressed by using
for the analysis of ridges) and at
for a thin ridge. From
Figure 6, it becomes obvious that non-contact is only about 30% of the simulation cell in the first case and contact is only 20% of the simulation cell in the second. At that point, a simulation effectively evaluates an integral over displacement (first case) or stress (second case) field using only two to three integration points. Yet relative errors are relatively small. They decrease quite substantially for all three studied choices for
when the linear mesh size is reduced to half its value. Evidence for this claim is not shown explicitly, because the main problem is the approach
to contact rather than a proper description of
in contact, as will be discussed further below.
3.2.2. Circular Defect Patterns
Since our main interest is the line ridge, we only sketch results for the two remaining defect patterns. The dimensionless elastic energy for the two circular patterns satisfies
Figure 9 shows the numerical results for
of the two circular defects, including their asymptotic behavior.
Proceeding as above, the
is obtained as
for the dimple.
Figure 10 reveals that this asymptotic solution is approached as the (dimensionless) range of adhesion is reduced.
No stable solution exists for the bulge in the continuum limit, because an extremum in
is a maximum in
. Thus, the bulge in
Figure 2 can only have arisen as a consequence of the finite-range of the adhesion. This argument is supported by the bulge’s disappearance in
Figure 3, in which the (dimensionless) range of adhesion was reduced compared to that used in
Figure 2. It is also consistent with the observation that the detachment process of a nominally flat surfaces (which can be roughly mimicked with—or “coarse-grained” to—Morse-like potentials) frequently has one last contact patch in place before the contact breaks.
3.3. Dissipated Energy
When two or more stable microstates coexist for a given collective degree of freedom, quasi-discontinuous transitions between them occur when the collective degree is driven externally. This is the mechanism by which multistability leads to instability and ultimately to energy loss, which, as stated in Coulomb’s law of friction, predominantly depends on the moved distances and much less on rates or velocities [
37,
49]. For Coulomb’s friction law and related laws to be applicable, the motion has to be slow enough to prevent “basin hopping” between the two stable “macro” states when they are similar in energy, but not so fast that significant heating occurs. In this section, we calculate the energy hysteresis arising from the multistability of non-contact and a line ridge.
In a first approximation, the stress can be approximated with zero as long as the elastomer is flat. The approximation is exact for potentials with a true cut-off, as for example, in the potential introduced later in Equation (31). When the range of adhesion is very small, the elastomer turns directly to a thick line ridge upon approach, which happens at the distance
, where the flat, non-contact solution becomes unstable. It is the larger of the two solutions in Equation (8), that is, the one in which the minus sign is selected in the parenthesis on the r.h.s. of that equation. Upon retraction, the elastomers flattens out again at the critical distance,
, where the line-ridge solution becomes unstable. Thus, for short-range adhesion
is obtained in a cycle going from non-contact to line ridge and back to non-contact.
In a more refined calculation, the “integration constant”
can be replaced with a more precise value for the lost energy in the continuum limit. The latter is best obtained by integrating (numerically) the
curve that is reconstructed from the reference line shown in
Figure 7. Moreover, a correction of
due to the gained energy while approaching the counterface in non-contact must be subtracted from the dissipated energy to yield accurate estimates.
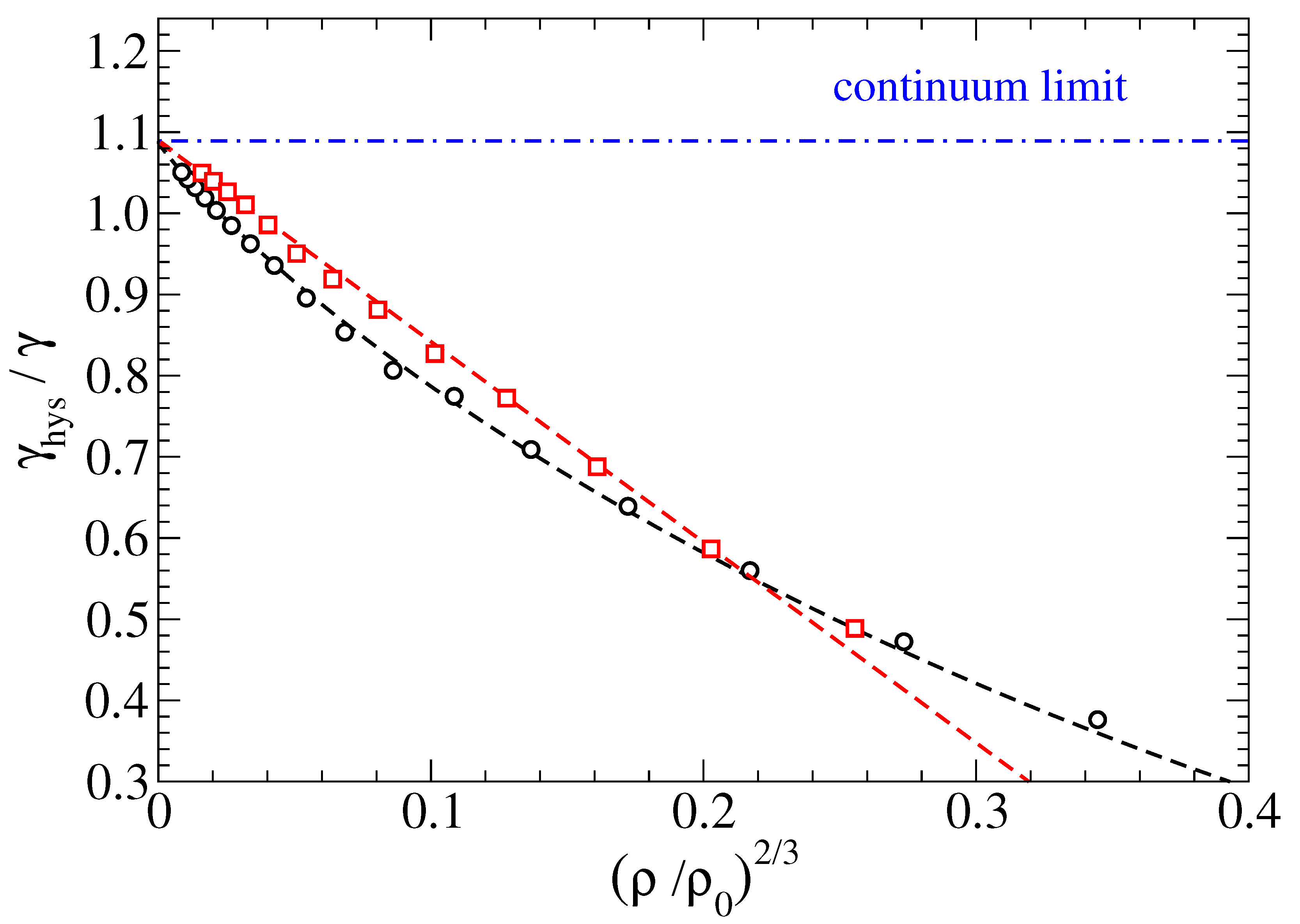
The second term on the r.h.s. of Equation (30c) is the main correction to the dissipated energy that arises by replacing a zero-range with a finite-range adhesion. Unfortunately, convergence of the computed dissipated energy is rather slow. For CZMs with a true cutoff
linear in
, the error disappears with
and thus with
. For the Morse potential, this scaling is further impeded by corrections logarithmic in
. GFMD data confirm these conclusions in
Figure 11.
Since optimizing prefactors is particularly important when convergence is slow, it may be desirable to use other CZMs than the one based on the Morse potential. For a CZM used to study not only (quasi-) statics, as in this work, but true dynamics, an additional requirement would be that the stress is a continuous function of the interfacial separation. This is because (strongly) discontinuous forces or stresses, as they occur in many CZMs at small
[
4,
5,
13,
14,
17], violate energy conservation even for a symplectic integration scheme [
50]. This in turn is likely to lead to undesirable dynamical artifacts, e.g., when modeling reciprocating motion. A simple CZM avoiding discontinuous forces is:
Figure 11 reveals that the alternative CZM converges to its asymptotic value more quickly than the Morse potential. Even more importantly, extrapolation to short-range adhesion can be achieved already at relatively large interaction ranges. This is mainly because the alternative CZM lacks the corrections in the second term on the r.h.s. of Equation (30d) that are logarithmic in
.
5. Conclusions and Outlook
The three main aims of this paper were (i) to provide a comprehensible theoretical framework describing the formation and failure (brittle fracture) of an adhesive, periodically repeated interface under constant normal stress and the subsequent energy hysteresis, (ii) to deduce generally applicable rules for the construction of cohesive zone models from the theoretical framework, and (iii) to apply the schemes obtained for the contact between two ideally flat surfaces to uneven surfaces. This last point includes rules for how to extrapolate dissipation computed with relatively long-ranged adhesion to shorter-ranged adhesion.
A particular focus of our work was the much overlooked approach to contact and the question at what separation an initially flat elastomer approaching a substrate with short but finite-range adhesion becomes unstable to the formation of surface undulations. This happens when the negative curvature of a cohesive-zone model (CZM) exceeds
, where
q is the wavenumber associated with a surface undulation. The ramification for the numerical modeling is that a mesh size should not exceed the scale within which an elastomer would want to ripple during the approach to contact, which leads to the condition
being the mesh size of an element into which the surface is discretized. This inequality can be used to either define the mesh size or to (re)define the CZM. In this work, we used it to set the range of interaction
in a CZM whose functional form was that of the Morse potential, which yields the proportionality
. Using a proportionality factor of
, see also Equation (11), no undesired instabilities show on the approach curve, while they do occur for
.
The usual procedure when modeling adhesive contacts is to ask the question at what tensile stress a mesh element is going to detach [
5,
13,
58]. The common argument is that it does so when the energy released during the detachment process exceeds the work of adhesion, which in turn leads to the condition
, which—when applied to a continuous, twice differentiable CZM—can be readily translated to Equation (33).
Table 1 gives a summary of choices made by different authors, however, translated to the proportionality factor
used for the Morse potential.
A compromise needs to be made when choosing the prefactor . For the approach curve, the proportionality factor is chosen at best as small as possible. However, when it is made too small, artificial instabilities and thus energy hysteresis ensue that are not present on the continuum solution. Unfortunately, if the proportionality factor is above a critical value, the continuum solution cannot be reached even for . Thus, a relatively safe choice should be to set the prefactor, such that a flat-on-flat geometry reveals no undesired instabilities. It appears as if excellent choices have been made in the literature so that the range of interaction is made small enough to lead to the (almost) best possible convergence, while being large enough to converge to the correct value.
The trouble of Equation (33), as it comes to modeling adhesion in the zero-range or continuum limit, is that the range of adhesion can only be chosen as
. This poor scaling is particularly problematic for the determination of adhesive hysteresis, because the lost energy density
scales only with
, so that
has corrections that cannot disappear more quickly than with
, which for a two-dimensional surface implies an
converge with the number of grid points
. We believe that it is this poor scaling as to why even a world-leading adhesion simulator like Pastewka [
41] abstained from making a direct comparison of approach and retraction of an elastomer from a randomly rough tip and instead has resorted to Persson’s contact-mechanics theory [
38] to rationalize the observed compression/decompression hysteresis.
A common solution to reducing the continuum-corrections during the approach is to simulate adhesion directly only during retraction, which, however, requires a contact shape optimization to be done, in particular, during the formation of the contact. Such an approach is relatively “cheap” for bodies of high symmetry, such as bodies of revolution. However, it would be prohibitively expensive when applied to irregular surface structures. Moreover, modeling adhesive interfaces with discontinuous stress-displacement relations could scarcely be applied to time-dependent problems, such as bulk visco-elastic hysteresis, which can add to adhesive losses.
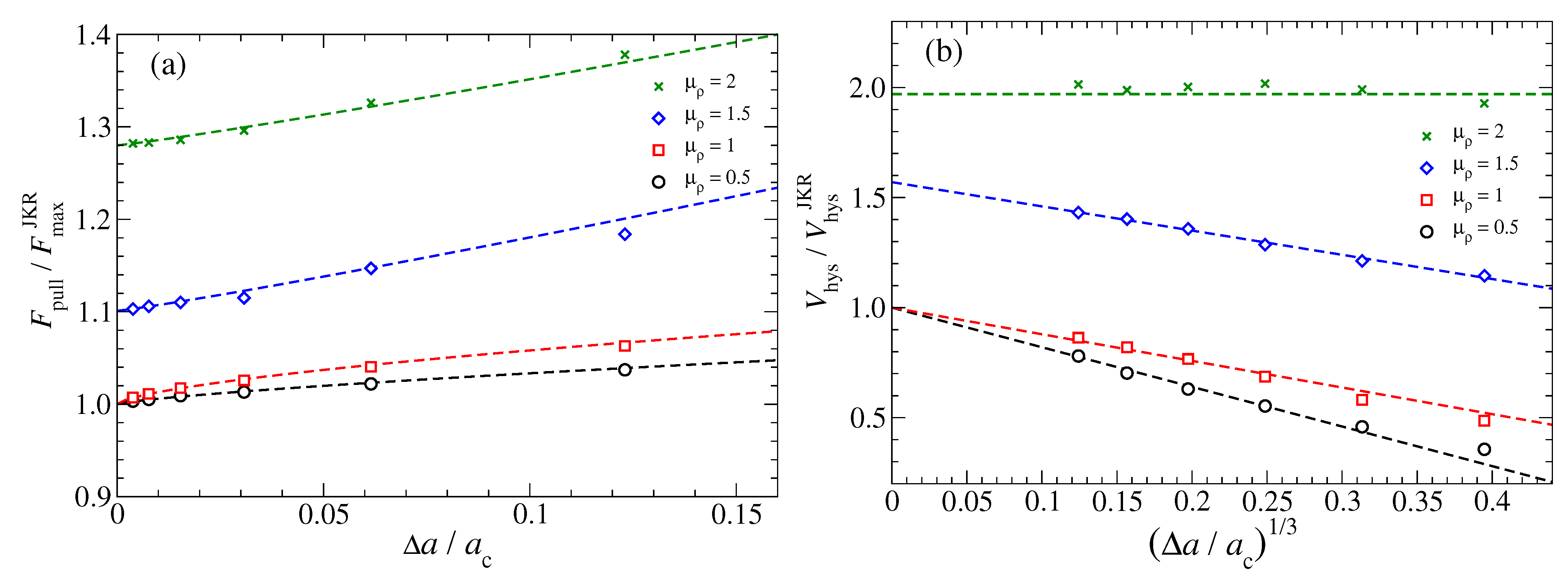
The findings for flat-on-flat geometries also apply to uneven surfaces, where the adhesive energy hysteresis
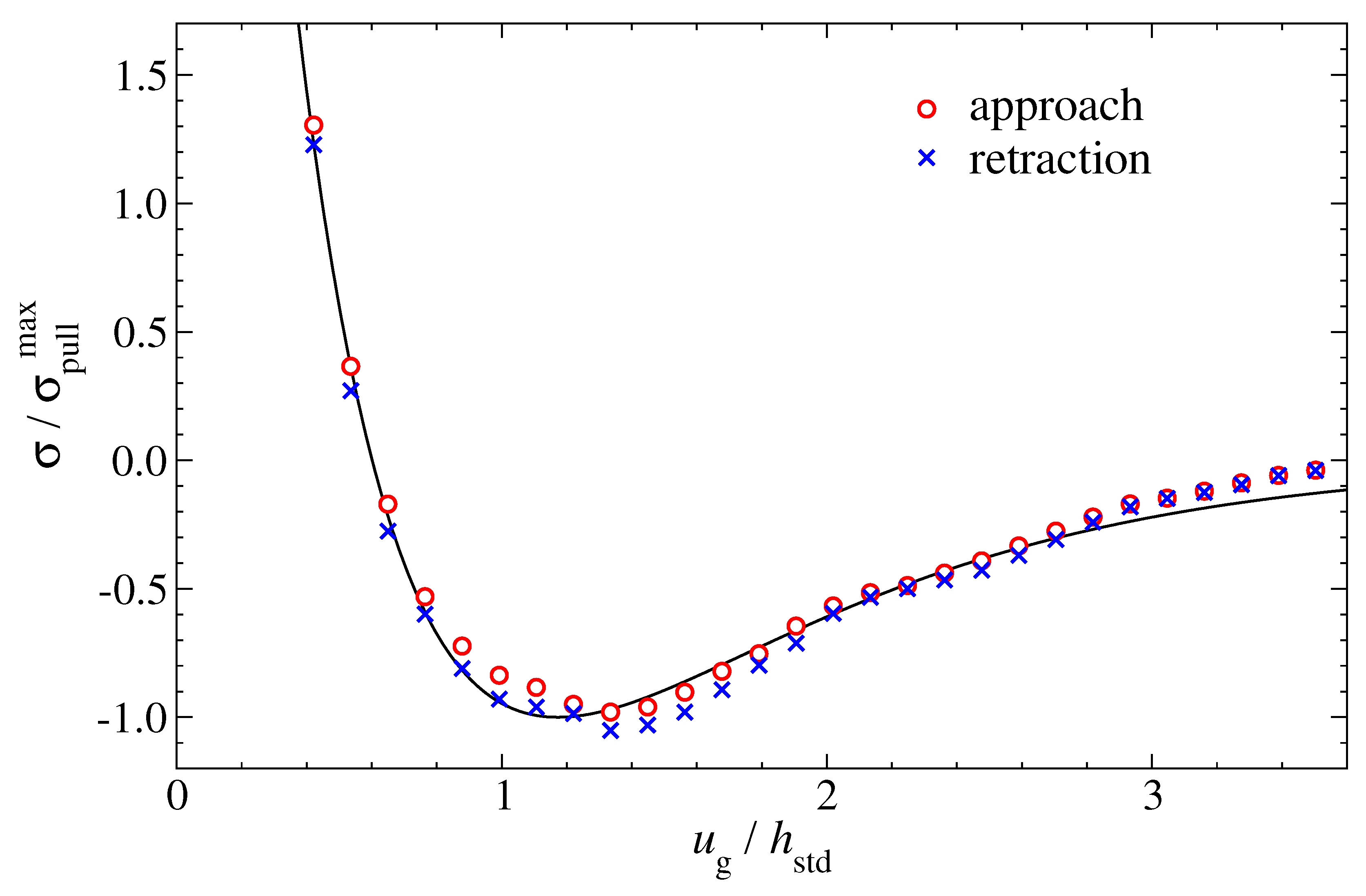
scales similarly unfavorably with mesh size for Hertzian and randomly rough contacts as for flat-on-flat geometries. In particular, we confirmed that quite large Tabor parameters of
distinctly exceeding ten, are needed to model the approach curve for an adhesive Hertzian indenter [
24], while the retraction curve can be modeled quite accurately with a Tabor parameter as small as
or even
.
In our simulations, the elastomer’s surface facing the indenter was displacement controlled, which is difficult to achieve experimentally due to bulk elasticity and the compliance of the loading apparatus. However, this mode of operation should be seen as a bonus allowing additional insight into the dynamics of adhesion to be gained. For example, a critical (tensile) stress can be determined, at which the elastomer’s surface flattens out upon retraction in addition to the maximum tensile stress, or, pull-off stress, which is measured when the retraction is load driven. Moreover, it may be useful to know the tensile stresses in the simulation of adhesive process during detachment processes, since any local grid point in an adhesive simulation is always in between being displacement and load-driven so that knowledge of the tension as a function of separation is often needed even at those separations that would be macroscopically unstable in a load-driven operation.
Our outlook on pull-off forces between randomly rough surfaces suggests that integrating out roughness effects at the small scales reduces not only the adhesion to be used in a cohesive-zone model but also increases the rate of interaction. Both effects combined substantially reduce the stiffness of the contact problem. A true challenge, however, will be to coarse grain the cohesive-zone models so that adhesive hysteresis, including preload effects on the pull-off force, as observed, for example, in structured micro pillars [
47], can be modeled. This would allow for the effective simulation of stress-sensitive adhesives.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}