The Influence of Mechanical Deformations on Surface Force Measurements


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods

3. Results and Discussion
3.1. Calibrations in a Dry Atmosphere
- Since the conception of the SFA, negative distances from to have been reported when two mica surfaces separated by water jump-in to contact [11,28,38,39,40,41,42]. This is due to the washing of gas molecules and organic contaminants (carbon compounds) that are spontaneously deposited on the mica surfaces in air [43] and to the dissolution in water of the potassium ions initially present on the mica surfaces. As adhesion is typically 10 times smaller in water than in a dry atmosphere, the mica is expected to be less compressed after the jump-in across water than during the calibration after the jump-in across a dry atmosphere. As compression of mica was not considered in these studies, the thickness of the contaminant layer may be underestimated, albeit not by more than a few angstroms given the much thinner mica used. Nevertheless, the dependence of this effect on the mica thickness and spring constant may explain—at least in part—the strong variability in the reported values.
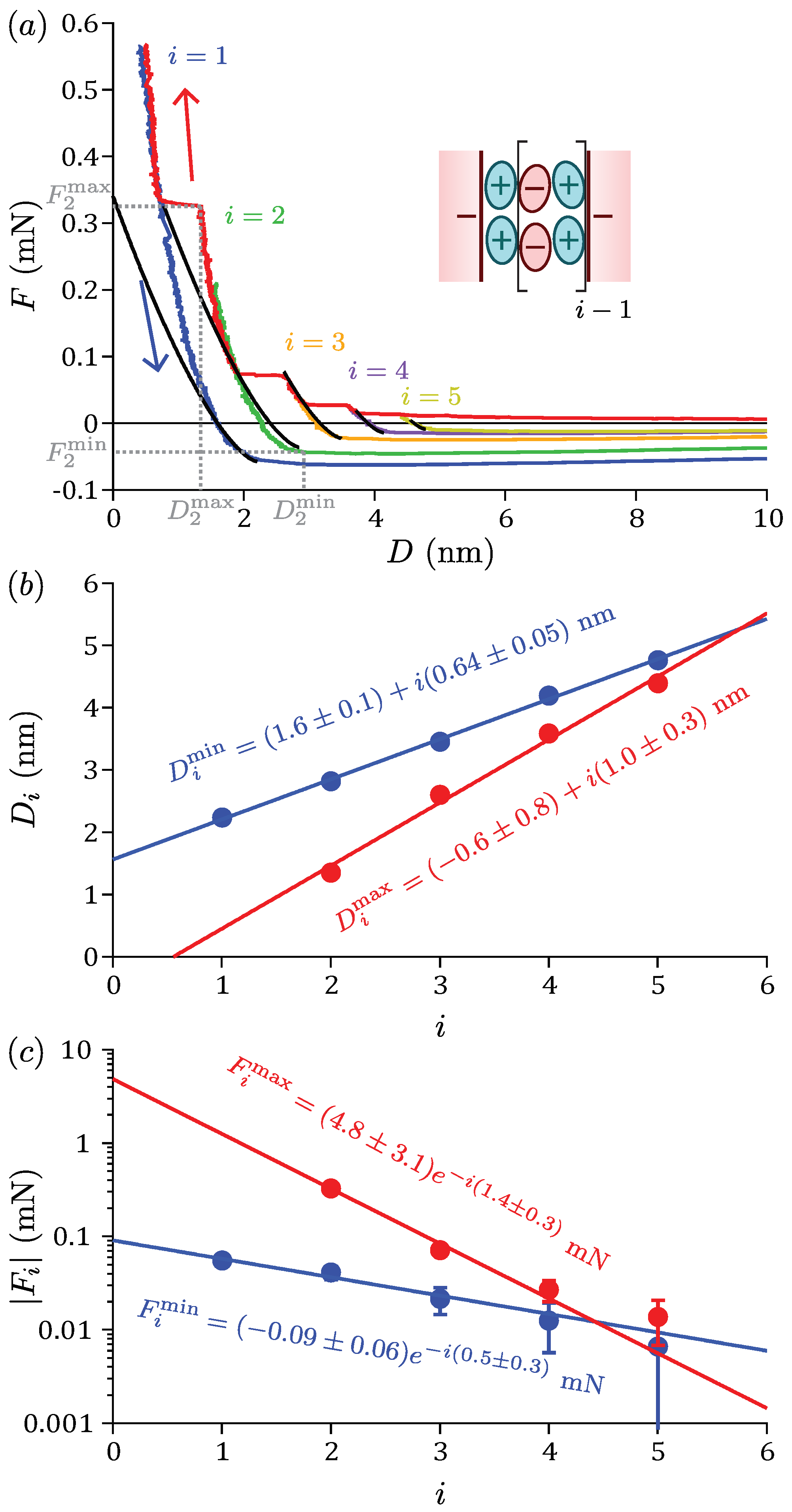
- In the case of molecular liquid giving rise to a structural force profile under confinement, a good accuracy on the distance D is needed in order to identify the absolute number of ordered layers composing the film (as illustrated in the subsection titled “Influence of surface deformations on structural force profile”).
- Dynamic measurements can be performed with the SFA to determine the slip length associated with a flow of liquid in vicinity of a solid surface. By definition, the slip length is the distance between the hydrodynamic origin and the mechanical origin. Being able to measure nanometric slip lengths therefore requires having a subnanometric resolution on the mechanical zero [18,44,45,46,47,48].
3.2. Contact Mechanics Across an Ionic Liquid
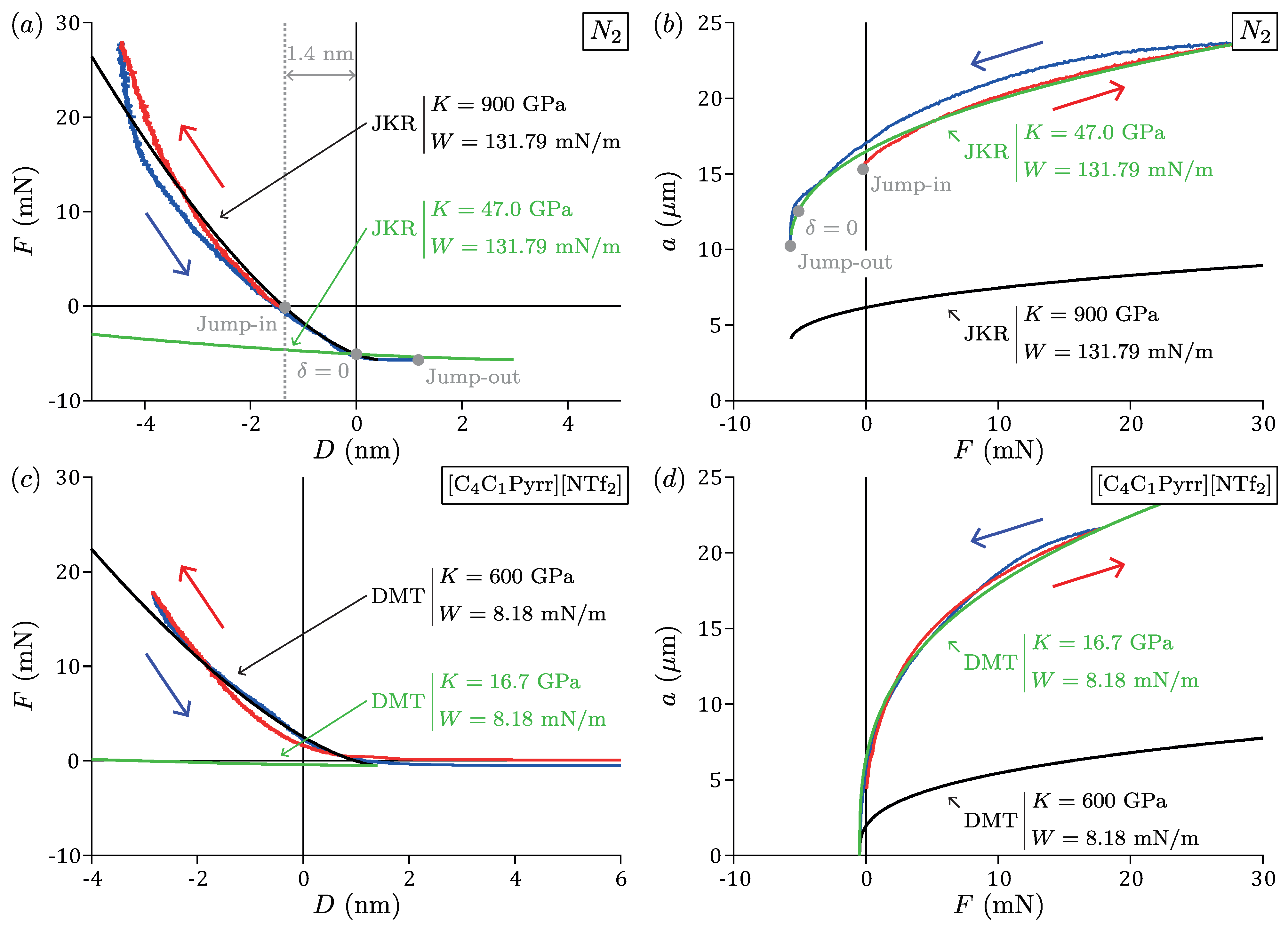
- The jump-out force obtained with force measurement techniques is routinely used to deduce the surface energy W. As the relationship between these two quantities depends on the model ( in the JKR model, in the DMT model), it is crucial to know the regime of contact in order to extract reliable values [53].
- When investigating friction in the boundary lubrication regime with smooth adhering surfaces, the applied load is generally large enough to flatten the sliding surfaces. These mechanical deformations have to be known in order to interpret the data, in particular to determine whether the friction is controlled by the area of contact or by the load, and to unravel the role of adhesion [10,39,53,54,55,56,57,58,59,60,61].
3.3. Influence of Surface Deformations on Structural Force Profile
- For this SFB study with an ionic liquid (1 , 3000 , 50 , 1 , 0.6 ), we obtain 2 and 4, in agreement with the fact that we have spring instabilities and a strong effect of the surface deformations on the structural force profile.
- For a previous SFA study with liquid crystals [84] (, , , , ), we obtain 1 and , in agreement with the fact that they have no spring instabilities and a small effect of the surface deformations on the structural force profile.
- For a previous AFM study with polyelectrolytes [73] (, , , , ), we obtain and . Additionally, for a previous AFM study with colloidal suspensions [74] (, , , , ), we obtain and . This is in agreement with the fact that both studies have no spring instabilities and a small effect of the surface deformations on the structural force profile.
4. Conclusions
- SFA experiments are not always in the JKR regime but can be in the DMT regime, typically for situations of moderate adhesion over a range of a few nanometers, as we have seen in the case of the ionic liquid. Using the correct model of contact mechanics is crucial, notably for quantitative investigations of adhesion or friction. The two regimes of contact are usually distinguished by calculating the value of the Maugis parameter from an estimate of the range of the attractive forces; it is in fact more accurate to look at the value of the contact radius before jump-out.
- In classical SFA experiments using mica sheets glued on glass lenses, the mica does not only bend but can also experience a compression, which we observed for relatively thick mica.
- This compression has to be taken into account for a proper calibration of the undeformed mica thickness in a dry atmosphere; for this purpose, we presented a method based on the fitting of the relation between the contact radius and the force with the JKR model. The usual procedure, which consists of taking the jump-in point as a reference, can lead to an underestimation of the mica thickness and an equivalent outward shift of the force profile measured after injecting the liquid. We found that this effect amounts to ∼ for a ∼-thick mica, and we expect it to decrease with the mica thickness.
- For any system showing a structural force profile with SFA or AFM, the exponentially decaying harmonic oscillation due to local variations of liquid density may be convoluted with the mechanical response of the confining solids. A correct interpretation of the detailed shape of the structural force profile is necessary to understand the behaviour of liquids in nanoconfinement.
- We have proposed a simple scaling criterion to estimate the degree of convolution. Typically, compression in the solids is dominant over compression in the liquid for simple liquids (large energies, small length-scales) and easily deformable solids (small elastic modulus, large radius of curvature). For SFA experiments with mica sheets glued on glass lenses, the influence of mica compression is interpreted to be more important and independent of the mica thickness at low loads and smaller and reduced for thinner mica at large loads. This effect is expected to be even more important at all loads when mica is replaced by a softer layer (such as EPON glue) [85,86,87] or at high loads if the distance measurement includes the indentation of the whole solid bodies (not only the top layers) [70].
- When the solid compression is dominant compared to liquid compression, a fit of the structural force profile with an exponentially decaying harmonic function is not appropriate. We have illustrated that it can be useful to consider heuristic formulations, which are based on extensions of contact mechanics models to situations where the solid surfaces confine a structured liquid film.
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SFB | Surface Force Balance |
| SFA | Surface Force Apparatus |
| AFM | Atomic Force Microscope |
| FECO | Fringes of Equal Chromatic Order |
| JKR | Johnson–Kendall–Roberts |
| DMT | Derjaguin–Muller–Toporov |
References
- Derjaguin, B. Untersuchungen über die Reibung und Adhäsion, IV. Kolloid-Zeitschrift 1934, 69, 155–164. [Google Scholar] [CrossRef]
- Israelachvili, J.N. Intermolecular and Surface Forces, 3rd ed.; Academic Press: San Diego, CA, USA, 2011. [Google Scholar] [CrossRef]
- Hertz, H. Ueber die Berührung fester elastischer Körper. J. Reine Angew. Math. 1882, 156. [Google Scholar] [CrossRef]
- Leroy, S.; Steinberger, A.; Cottin-Bizonne, C.; Restagno, F.; Léger, L.; Charlaix, E. Hydrodynamic Interaction between a Spherical Particle and an Elastic Surface: A Gentle Probe for Soft Thin Films. Phys. Rev. Lett. 2012, 108, 264501. [Google Scholar] [CrossRef]
- Wang, Y.; Dhong, C.; Frechette, J. Out-of-Contact Elastohydrodynamic Deformation due to Lubrication Forces. Phys. Rev. Lett. 2015, 115, 248302. [Google Scholar] [CrossRef] [Green Version]
- Horn, R.G.; Israelachvili, J.N.; Pribac, F. Measurement of the Deformation and Adhesion of Solids in Contact. J. Colloid Interface Sci. 1987, 115, 480–492. [Google Scholar] [CrossRef]
- McGuiggan, P.M.; Wallace, J.S.; Smith, D.T.; Sridhar, I.; Zheng, Z.W.; Johnson, K.L. Contact mechanics of layered elastic materials: Experiment and theory. J. Phys. D 2007, 40, 5984–5994. [Google Scholar] [CrossRef]
- Klein, J.; Kumacheva, E. Confinement-Induced Phase Transitions in Simple Liquids. Science 1995, 269, 816–819. [Google Scholar] [CrossRef] [PubMed]
- Klein, J.; Kumacheva, E. Simple liquids confined to molecularly thin layers. I. Confinement-induced liquid-to-solid phase transitions. J. Chem. Phys. 1998, 108, 6996–7009. [Google Scholar] [CrossRef]
- Kumacheva, E.; Klein, J. Simple Liquids Confined to Molecularly Thin Layers. II. Shear and Frictional Behavior of Solidified Films. J. Chem. Phys. 1998, 108, 7010–7022. [Google Scholar] [CrossRef]
- Perkin, S.; Chai, L.; Kampf, N.; Raviv, U.; Briscoe, W.; Dunlop, I.; Titmuss, S.; Seo, M.; Kumacheva, E.; Klein, J. Forces Between Mica Surfaces, Prepared in Different Ways, Across Aqueous and Nonaqueous Liquids Confined to Molecularly Thin Films. Langmuir 2006, 22, 6142–6152. [Google Scholar] [CrossRef]
- Klein, J. Modes of energy loss on shearing of thin confined films. Tribol. Lett. 2007, 26, 229. [Google Scholar] [CrossRef]
- Mazuyer, D.; Cayer-Barrioz, J.; Tonck, A.; Jarnias, F. Friction Dynamics of Confined Weakly Adhering Boundary Layers. Langmuir 2008, 24, 3857–3866. [Google Scholar] [CrossRef] [PubMed]
- Smith, A.M.; Lovelock, K.R.J.; Gosvami, N.N.; Welton, T.; Perkin, S. Quantized Friction Across Ionic Liquid Thin Films. Phys. Chem. Chem. Phys. 2013, 15, 15317–15320. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.L.; Kendall, K.; Roberts, A.D.; Tabor, D. Surface energy and the contact of elastic solids. Proc. R. Soc. A 1971, 324, 301–313. [Google Scholar] [CrossRef] [Green Version]
- Derjaguin, B.V.; Muller, V.M.; Toporov, Y.P. Effect of Contact Deformations on the Adhesion of Particles. J. Colloid Interface Sci. 1975, 53, 314–326. [Google Scholar] [CrossRef]
- Christenson, H.K. Surface Deformations in Direct Force Measurements. Langmuir 1996, 12, 1404–1405. [Google Scholar] [CrossRef]
- Lhermerout, R.; Perkin, S. Nanoconfined Ionic Liquids: Disentangling Electrostatic and Viscous Forces. Phys. Rev. Fluids 2018, 3, 014201. [Google Scholar] [CrossRef]
- Lhermerout, R.; Diederichs, C.; Perkin, S. Are Ionic Liquids Good Boundary Lubricants? A Molecular Perspective. Lubricants 2018, 6, 9. [Google Scholar] [CrossRef] [Green Version]
- Rao, C.J.; Venkatesan, K.A.; Tata, B.; Nagarajan, K.; Srinivasan, T.; Vasudeva Rao, P. Radiation stability of some room temperature ionic liquids. Radiat. Phys. Chem. 2011, 80, 643–649. [Google Scholar] [CrossRef]
- McNeil, L.E.; Grimsditch, M. Elastic moduli of muscovite mica. J. Phys. Condens. Matter 1993, 5, 1681–1690. [Google Scholar] [CrossRef]
- Köster, W.; Franz, H. Poisson’s ratio for metals and alloys. Metall. Rev. 1961, 6, 1–56. [Google Scholar] [CrossRef]
- Israelachvili, J.N. Thin Film Studies Using Multiple-Beam Interferometry. J. Colloid Interface Sci. 1973, 44, 259–272. [Google Scholar] [CrossRef]
- Schwenzfeier, K.A.; Erbe, A.; Bilotto, P.; Lengauer, M.; Merola, C.; Cheng, H.W.; Mears, L.L.E.; Valtiner, M. Optimizing multiple beam interferometry in the surface forces apparatus: Novel optics, reflection mode modeling, metal layer thicknesses, birefringence, and rotation of anisotropic layers. Rev. Sci. Instrum. 2019, 90, 043908. [Google Scholar] [CrossRef]
- Gebbie, M.A.; Dobbs, H.A.; Valtiner, M.; Israelachvili, J.N. Long-range electrostatic screening in ionic liquids. Proc. Natl. Acad. Sci. USA 2015, 112, 7432–7437. [Google Scholar] [CrossRef] [Green Version]
- Smith, A.M.; Lee, A.A.; Perkin, S. The Electrostatic Screening Length in Concentrated Electrolytes Increases with Concentration. J. Phys. Chem. Lett. 2016, 7, 2157–2163. [Google Scholar] [CrossRef] [Green Version]
- Maugis, D. Adhesion of spheres: The JKR-DMT transition using a dugdale model. J. Colloid Interface Sci. 1992, 150, 243–269. [Google Scholar] [CrossRef]
- Israelachvili, J.N.; Adams, G.E. Measurement of forces between two mica surfaces in aqueous electrolyte solutions in the range 0–100 nm. J. Chem. Soc. Faraday Trans. 1978, 74, 975–1001. [Google Scholar] [CrossRef]
- Math, S.; Horn, R.; Jayaram, V.; Biswas, S.K. A general contact mechanical formulation of multilayered structures and its application to deconvolute thickness/mechanical properties of glue used in surface force apparatus. J. Colloid Interface Sci. 2007, 308, 551–561. [Google Scholar] [CrossRef]
- Heuberger, M. The extended surface forces apparatus. Part I. Fast spectral correlation interferometry. Rev. Sci. Instrum. 2001, 72, 1700–1707. [Google Scholar] [CrossRef]
- Espinosa-Marzal, R.M.; Drobek, T.; Balmer, T.; Heuberger, M.P. Hydrated-ion ordering in electrical double layers. Phys. Chem. Chem. Phys. 2012, 14, 6085–6093. [Google Scholar] [CrossRef] [PubMed]
- Espinosa-Marzal, R.M.; Arcifa, A.; Rossi, A.; Spencer, N.D. Ionic Liquids Confined in Hydrophilic Nanocontacts: Structure and Lubricity in the Presence of Water. J. Phys. Chem. C 2014, 118, 6491–6503. [Google Scholar] [CrossRef]
- Jurado, L.A.; Kim, H.; Arcifa, A.; Rossi, A.; Leal, C.; Spencer, N.D.; Espinosa-Marzal, R.M. Irreversible structural change of a dry ionic liquid under nanoconfinement. Phys. Chem. Chem. Phys. 2015, 17, 13613–13624. [Google Scholar] [CrossRef]
- Jurado, L.A.; Kim, H.; Rossi, A.; Arcifa, A.; Schuh, J.K.; Spencer, N.D.; Leal, C.; Ewoldt, R.H.; Espinosa-Marzal, R.M. Effect of the environmental humidity on the bulk, interfacial and nanoconfined properties of an ionic liquid. Phys. Chem. Chem. Phys. 2016, 18, 22719–22730. [Google Scholar] [CrossRef]
- Zachariah, Z.; Espinosa-Marzal, R.M.; Spencer, N.D.; Heuberger, M.P. Stepwise collapse of highly overlapping electrical double layers. Phys. Chem. Chem. Phys. 2016, 18, 24417–24427. [Google Scholar] [CrossRef] [Green Version]
- Heuberger, M.P.; Zachariah, Z.; Spencer, N.D.; Espinosa-Marzal, R.M. Collective dehydration of ions in nano-pores. Phys. Chem. Chem. Phys. 2017, 19, 13462–13468. [Google Scholar] [CrossRef] [PubMed]
- Zachariah, Z.; Espinosa-Marzal, R.M.; Heuberger, M.P. Ion specific hydration in nano-confined electrical double layers. J. Colloid Interface Sci. 2017, 506, 263–270. [Google Scholar] [CrossRef] [PubMed]
- Tabor, D.F.R.S.; Winterton, R.H.S. The direct measurement of normal and retarded van der Waals forces. Proc. R. Soc. A 1969, 312, 435–450. [Google Scholar] [CrossRef]
- Homola, A.M.; Israelachvili, J.N.; Gee, M.L.; McGuiggan, P.M. Measurements of and Relation Between the Adhesion and Friction of Two Surfaces Separated by Molecularly Thin Liquid Films. J. Tribol. 1989, 111, 675–682. [Google Scholar] [CrossRef]
- Raviv, U.; Laurat, P.; Klein, J. Fluidity of water confined to subnanometre films. Nature 2001, 413, 51–54. [Google Scholar] [CrossRef]
- Raviv, U.; Klein, J. Fluidity of Bound Hydration Layers. Science 2002, 297, 1540–1543. [Google Scholar] [CrossRef] [Green Version]
- Raviv, A.; Laurat, P.; Klein, J. Time dependence of forces between mica surfaces in water and its relation to the release of surface ions. J. Chem. Phys. 2002, 116, 5167–5172. [Google Scholar] [CrossRef]
- Poppa, H.; Elliot, A.G. The surface composition of Mica substrates. Surf. Sci. 1971, 24, 149–163. [Google Scholar] [CrossRef]
- Chan, D.Y.C.; Horn, R.G. The drainage of thin liquid films between solid surfaces. J. Chem. Phys. 1985, 83, 5311–5324. [Google Scholar] [CrossRef] [Green Version]
- Israelachvili, J.N. Measurement of the Viscosity of Liquids in Very Thin Films. J. Colloid Interface Sci. 1986, 110, 263–271. [Google Scholar] [CrossRef]
- Klein, J.; Kamiyama, Y.; Yoshizawa, H.; Israelachvili, J.N.; Fredrickson, G.H.; Pincus, P.; Fetters, L.J. Lubrication forces between surfaces bearing polymer brushes. Macromolecules 1993, 26, 5552–5560. [Google Scholar] [CrossRef]
- Campbell, S.E.; Luengo, G.; Srdanov, V.I.; Wudl, F.; Israelachvili, J.N. Very Low Viscosity at the Solid-Liquid Interface Induced by Adsorbed C60 Monolayers. Nature 1996, 382, 520–522. [Google Scholar] [CrossRef]
- Cottin-Bizonne, C.; Steinberger, A.; Cross, B.; Raccurt, O.; Charlaix, E. Nanohydrodynamics: The Intrinsic Flow Boundary Condition on Smooth Surfaces. Langmuir 2008, 24, 1165–1172. [Google Scholar] [CrossRef]
- Reedy, E. Thin-coating contact mechanics with adhesion. J. Mater. Res. 2006, 21, 2660–2668. [Google Scholar] [CrossRef]
- Borodich, F.M.; Galanov, B.A.; Perepelkin, N.V.; Prikazchikov, D.A. Adhesive contact problems for a thin elastic layer: Asymptotic analysis and the JKR theory. Math. Mech. Solids 2019, 24, 1405–1424. [Google Scholar] [CrossRef]
- Sridhar, I.; Johnson, K.L.; Fleck, N.A. Adhesion mechanics of the surface force apparatus. J. Phys. D 1997, 30, 1710–1719. [Google Scholar] [CrossRef]
- Israelachvili, J.N.; Perez, E.; Tandon, R.K. On the adhesion force between deformable solids. J. Colloid Interface Sci. 1980, 78, 260–261. [Google Scholar] [CrossRef]
- Grierson, D.S.; Flater, E.E.; Carpick, R.W. Accounting for the JKR-DMT transition in adhesion and friction measurements with atomic force microscopy. J. Adhes. Sci. Technol. 2005, 19, 291–311. [Google Scholar] [CrossRef] [Green Version]
- Derjaguin, B.V. Mechanical properties of the boundary lubrication layer. Wear 1988, 128, 19–27. [Google Scholar] [CrossRef]
- Israelachvili, J.N.; Chen, Y.L.; Yoshizawa, H. Relationship between adhesion and friction forces. J. Adhes. Sci. Technol. 1994, 8, 1231–1249. [Google Scholar] [CrossRef]
- Berman, A.; Drummond, C.; Israelachvili, J. Amontons’ law at the molecular level. Tribol. Lett. 1998, 4, 95. [Google Scholar] [CrossRef]
- Bogdanovic, G.; Tiberg, F.; Rutland, M.W. Sliding Friction between Cellulose and Silica Surfaces. Langmuir 2001, 17, 5911–5916. [Google Scholar] [CrossRef]
- Bureau, L. Nonlinear Rheology of a Nanoconfined Simple Fluid. Phys. Rev. Lett. 2010, 104, 218302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lessel, M.; Loskill, P.; Hausen, F.; Gosvami, N.N.; Bennewitz, R.; Jacobs, K. Impact of van der Waals Interactions on Single Asperity Friction. Phys. Rev. Lett. 2013, 111, 035502. [Google Scholar] [CrossRef] [PubMed]
- Vialar, P.; Merzeau, P.; Barthel, E.; Giasson, S.; Drummond, C. Interaction between Compliant Surfaces: How Soft Surfaces Can Reduce Friction. Langmuir 2019, 35, 15723–15728. [Google Scholar] [CrossRef] [PubMed]
- Lhermerout, R.; Perkin, S. A new methodology for a detailed investigation of quantized friction in ionic liquids. Phys. Chem. Chem. Phys. 2020, 22, 455–466. [Google Scholar] [CrossRef]
- Horn, R.G.; Evans, D.F.; Ninham, B.W. Double-layer and solvation forces measured in a molten salt and its mixtures with water. J. Phys. Chem. 1988, 92, 3531–3537. [Google Scholar] [CrossRef]
- Atkin, R.; Warr, G.G. Structure in Confined Room-Temperature Ionic Liquids. J. Phys. Chem. C 2007, 111, 5162–5168. [Google Scholar] [CrossRef]
- Bou-Malham, I.; Bureau, L. Nanoconfined ionic liquids: Effect of surface charges on flow and molecular layering. Soft Matter 2010, 6, 4062–4065. [Google Scholar] [CrossRef]
- Perkin, S.; Albrecht, T.; Klein, J. Layering and shear properties of an ionic liquid, 1-ethyl-3-methylimidazolium ethylsulfate, confined to nano-films between mica surfaces. Phys. Chem. Chem. Phys. 2010, 12, 1243–1247. [Google Scholar] [CrossRef]
- Ueno, K.; Kasuya, M.; Watanabe, M.; Mizukami, M.; Kurihara, K. Resonance shear measurement of nanoconfined ionic liquids. Phys. Chem. Chem. Phys. 2010, 12, 4066–4071. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, Y.X.; Yan, J.W.; Su, Y.Z.; Zhang, M.; Mao, B.W. Probing double layer structures of Au (111)-BMIPF6 ionic liquid interfaces from potential-dependent AFM force curves. Chem. Commun. 2012, 48, 582–584. [Google Scholar] [CrossRef]
- Hoth, J.; Hausen, F.; Müser, M.H.; Bennewitz, R. Force microscopy of layering and friction in an ionic liquid. J. Phys. Condens. Matter 2014, 26, 284110. [Google Scholar] [CrossRef]
- Cheng, H.W.; Stock, P.; Moeremans, B.; Baimpos, T.; Banquy, X.; Renner, F.U.; Valtiner, M. Characterizing the Influence of Water on Charging and Layering at Electrified Ionic-Liquid/Solid Interfaces. Adv. Mater. Interfaces 2015, 2, 1500159. [Google Scholar] [CrossRef]
- Garcia, L.; Jacquot, L.; Charlaix, E.; Cross, B. Nanomechanics of ionic liquids at dielectric and metallic interfaces. Faraday Discuss. 2017, 206, 443–457. [Google Scholar] [CrossRef]
- Smith, A.M.; Lee, A.A.; Perkin, S. Switching the Structural Force in Ionic Liquid-Solvent Mixtures by Varying Composition. Phys. Rev. Lett. 2017, 118, 096002. [Google Scholar] [CrossRef]
- Hayes, R.; El Abedin, S.Z.; Atkin, R. Pronounced Structure in Confined Aprotic Room-Temperature Ionic Liquids. J. Phys. Chem. B 2009, 113, 7049–7052. [Google Scholar] [CrossRef]
- Moazzami-Gudarzi, M.; Kremer, T.; Valmacco, V.; Maroni, P.; Borkovec, M.; Trefalt, G. Interplay between Depletion and Double-Layer Forces Acting between Charged Particles in Solutions of Like-Charged Polyelectrolytes. Phys. Rev. Lett. 2016, 117, 088001. [Google Scholar] [CrossRef] [PubMed]
- Schön, S.; von Klitzing, R. A simple extension of the commonly used fitting equation for oscillatory structural forces in case of silica nanoparticle suspensions. Beilstein J. Nanotechnol. 2018, 9, 1095–1107. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Horn, R.G.; Israelachvili, J.N. Direct measurement of structural forces between two surfaces in a nonpolar liquid. J. Chem. Phys. 1981, 75, 1400–1411. [Google Scholar] [CrossRef]
- Smith, A.M.; Lovelock, K.R.J.; Perkin, S. Monolayer and bilayer structures in ionic liquids and their mixtures confined to nano-films. Faraday Discuss. 2013, 167, 279–292. [Google Scholar] [CrossRef]
- Griffin, L.R.; Browning, K.L.; Clarke, S.M.; Smith, A.M.; Perkin, S.; Skoda, M.W.A.; Norman, S.E. Direct measurements of ionic liquid layering at a single mica-liquid interface and in nano-films between two mica-liquid interfaces. Phys. Chem. Chem. Phys. 2017, 19, 297–304. [Google Scholar] [CrossRef] [Green Version]
- Cheng, H.W.; Weiss, H.; Stock, P.; Chen, Y.J.; Reinecke, C.R.; Dienemann, J.N.; Mezger, M.; Valtiner, M. Effect of Concentration on the Interfacial and Bulk Structure of Ionic Liquids in Aqueous Solution. Langmuir 2018, 34, 2637–2646. [Google Scholar] [CrossRef]
- Lhermerout, R.; Diederichs, C.; Sinha, S.; Porfyrakis, K.; Perkin, S. Are Buckminsterfullerenes Molecular Ball Bearings? J. Phys. Chem. B 2019, 123, 310–316. [Google Scholar] [CrossRef]
- Khan, S.H.; Matei, G.; Patil, S.; Hoffmann, P.M. Dynamic Solidification in Nanoconfined Water Films. Phys. Rev. Lett. 2010, 105, 106101. [Google Scholar] [CrossRef] [Green Version]
- Seddon, J.R.T. Conservative and Dissipative Interactions of Ionic Liquids in Nanoconfinement. J. Phys. Chem. C 2014, 118, 22197–22201. [Google Scholar] [CrossRef]
- Khan, S.H.; Hoffmann, P.M. Young’s modulus of nanoconfined liquids? J. Colloid Interface Sci. 2016, 473, 93–99. [Google Scholar] [CrossRef] [Green Version]
- Comtet, J.; Nigues, A.; Kaiser, V.; Coasne, B.; Bocquet, L.; Siria, A. Nanoscale capillary freezing of ionic liquids confined between metallic interfaces and the role of electronic screening. Nat. Mater. 2017, 16, 634–639. [Google Scholar] [CrossRef] [Green Version]
- Cross, B.; Crassous, J. Rheological properties of a highly confined film of a lyotropic lamellar phase. Eur. Phys. J. E 2004, 14, 249–257. [Google Scholar] [CrossRef]
- Britton, J.; Cousens, N.E.A.; Coles, S.W.; van Engers, C.D.; Babenko, V.; Murdock, A.T.; Koós, A.; Perkin, S.; Grobert, N. A Graphene Surface Force Balance. Langmuir 2014, 30, 11485–11492. [Google Scholar] [CrossRef] [PubMed]
- van Engers, C.D.; Cousens, N.E.A.; Babenko, V.; Britton, J.; Zappone, B.; Grobert, N.; Perkin, S. Direct Measurement of the Surface Energy of Graphene. Nano Lett. 2017, 17, 3815–3821. [Google Scholar] [CrossRef] [PubMed]
- van Engers, C.D.; Balabajew, M.; Southam, A.; Perkin, S. A 3-mirror surface force balance for the investigation of fluids confined to nanoscale films between two ultra-smooth polarizable electrodes. Rev. Sci. Instrum. 2018, 89, 123901. [Google Scholar] [CrossRef] [PubMed]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lhermerout, R. The Influence of Mechanical Deformations on Surface Force Measurements. Lubricants 2021, 9, 69. https://doi.org/10.3390/lubricants9070069
Lhermerout R. The Influence of Mechanical Deformations on Surface Force Measurements. Lubricants. 2021; 9(7):69. https://doi.org/10.3390/lubricants9070069
Chicago/Turabian StyleLhermerout, Romain. 2021. "The Influence of Mechanical Deformations on Surface Force Measurements" Lubricants 9, no. 7: 69. https://doi.org/10.3390/lubricants9070069
APA StyleLhermerout, R. (2021). The Influence of Mechanical Deformations on Surface Force Measurements. Lubricants, 9(7), 69. https://doi.org/10.3390/lubricants9070069