
TD-Det: A Tiny Size Dense Aphid Detection Network under In-Field Environment


Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Methodologies
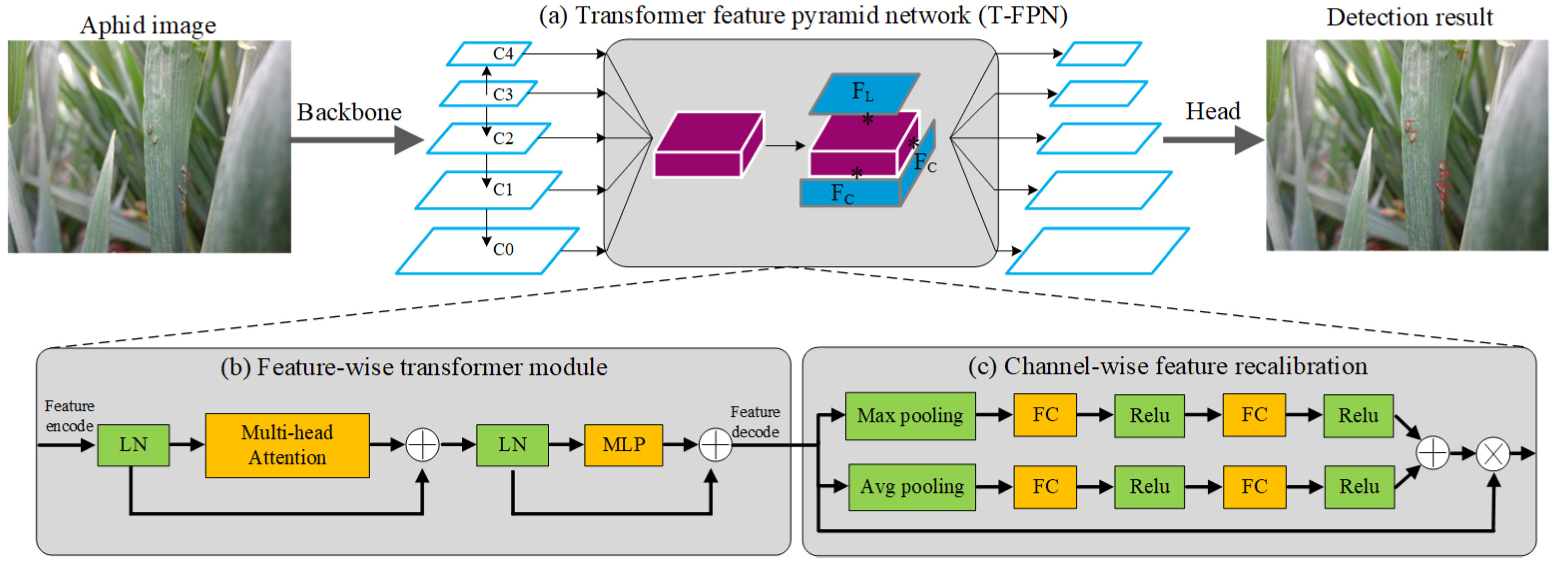
2.2.1. Transformer Feature Pyramid Network (T-FPN)
2.2.2. Feature-Wise Transformer Module (FTM)
2.2.3. Channel-Wise Feature Recalibration Module (CFRM)
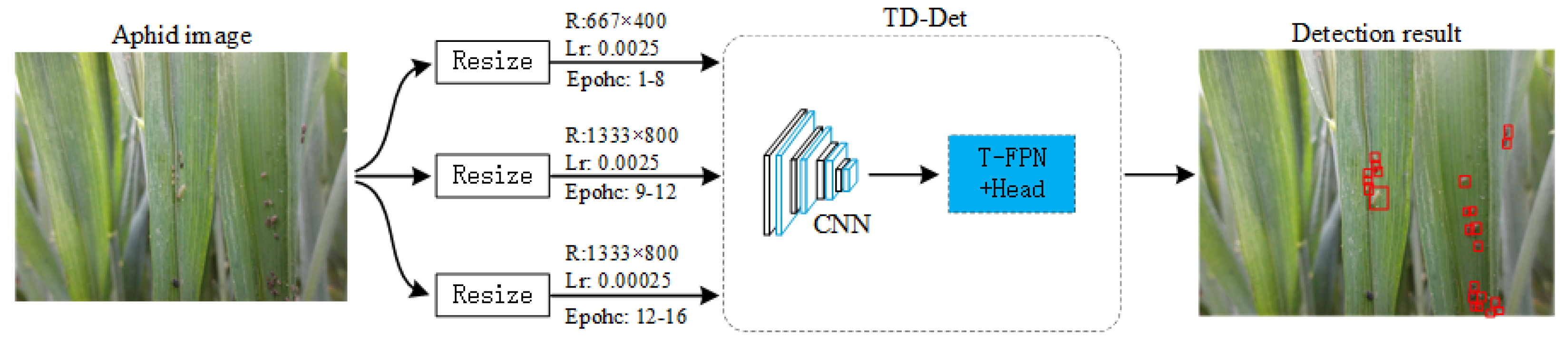
2.2.4. Two Versions of TD-Det
2.2.5. Multi-Resolution Training Method (MTM)
2.3. Loss Function of TD-Det
3. Experiments and Discussions
3.1. Experiment Settings
3.2. Evaluation Metrics
3.3. Contrastive Methods Involved in Experiments
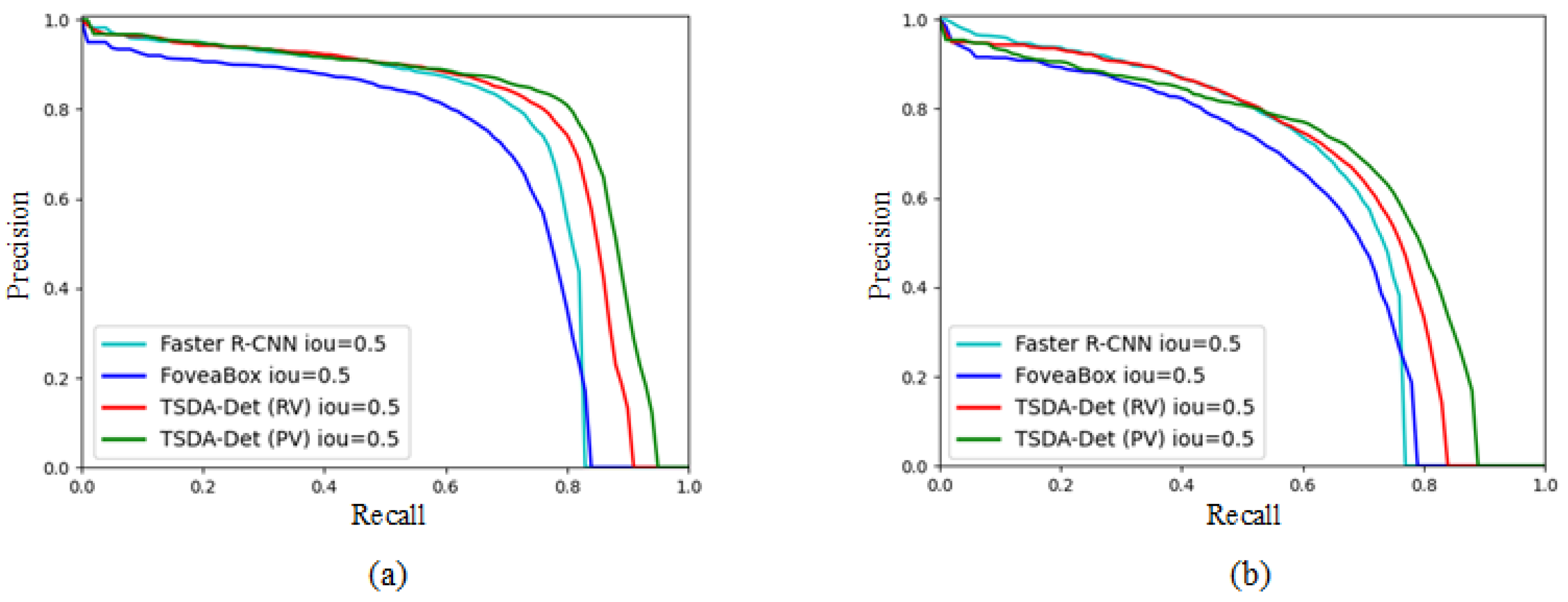
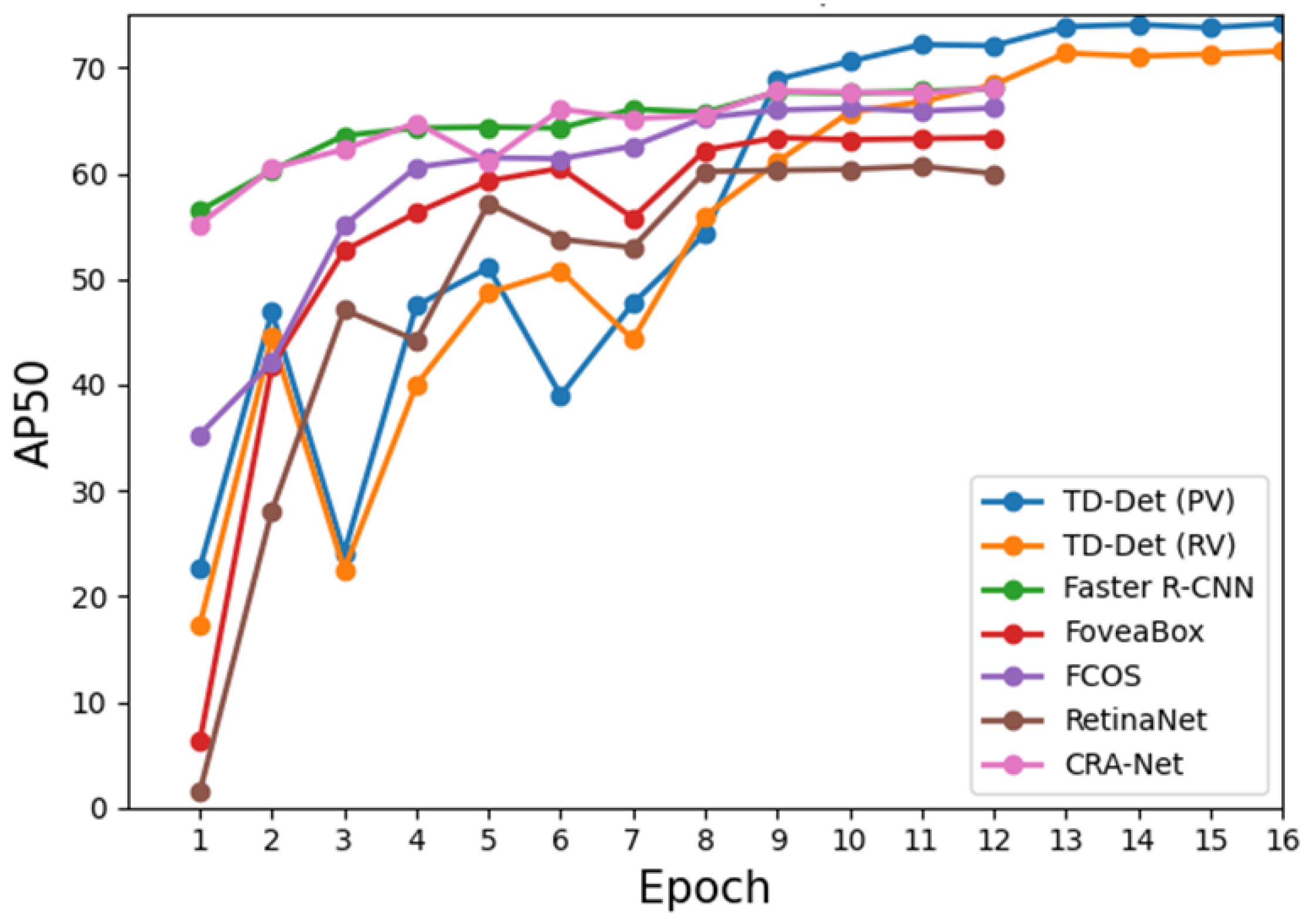
3.4. Performance on the APHID-4K Dataset
3.5. Ablation Experiments
3.6. Analysis and Discussion
3.7. Qualitative Results
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, Y.; Du, G.; Xie, S.; Long, X.; Sun, G.; Zhu, S.; He, X.; Liu, Y.; Zhu, Y.; Chen, B. The Insecticidal Efficacy and Physiological Action Mechanism of a Novel Agent GC16 against Tetranychus pueraricola (Acari: Tetranychidae). Insects 2022, 13, 433. [Google Scholar] [CrossRef]
- Rabelo, M.M.; Santos, I.B.; Paula-Moraes, S.V. Spodoptera exigua (Hubner) (Lepidoptera: Noctuidae) Fitness and Resistance Stability to Diamide and Pyrethroid Insecticides in the United States. Insects 2022, 13, 365. [Google Scholar] [CrossRef] [PubMed]
- Bernardo, E.N. Adoption of the integrated pest management (IPM) approach in crop protection: A researcher’s view. Philipp. Entomol. 1993, 9, 175–185. [Google Scholar]
- Solis-Sánchez, L.O.; Castañeda-Miranda, R.; García-Escalante, J.J.; Torres-Pacheco, I.; Guevara-González, R.G.; Castañeda-Miranda, C.L.; Alaniz-Lumbreras, P.D. Scale invariant feature approach for insect monitoring. Comput. Electron. Agric. 2011, 75, 92–99. [Google Scholar] [CrossRef]
- Xia, C.; Lee, J.M.; Li, Y.; Chung, B.K.; Chon, T.S. In situ detection of small-size insect pests sampled on traps using multifractal analysis. Opt. Eng. 2012, 51, 027001. [Google Scholar] [CrossRef]
- Ebrahimi, M.; Khoshtaghaza, M.H.; Minaei, S.; Jamshidi, B. Vision-based pest detection based on SVM classification method. Comput. Electron. Agric. 2017, 137, 52–58. [Google Scholar] [CrossRef]
- Deng, L.; Wang, Y.; Han, Z.; Yu, R. Research on insect pest image detection and recognition based on bio-inspired methods. Biosyst. Eng. 2018, 169, 139–148. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Rustia, D.J.A.; Chao, J.J.; Chiu, L.Y.; Wu, Y.F.; Chung, J.Y.; Hsu, J.C.; Lin, T.T. Automatic greenhouse insect pest detection and recognition based on a cascaded deep learning classification method. J. Appl. Entomol. 2021, 145, 206–222. [Google Scholar] [CrossRef]
- Liu, L.; Xie, C.; Wang, R.; Yang, P.; Sudirman, S.; Zhang, J.; Li, R.; Wang, F. Deep learning based automatic multi-class wild pest monitoring approach using hybrid global and local activated features. IEEE Trans. Ind. Inform. 2020, 17, 7589–7598. [Google Scholar] [CrossRef]
- Jiao, L.; Dong, S.; Zhang, S.; Xie, C.; Wang, H. AF-RCNN: An anchor-free convolutional neural network for multi-categories agricultural pest detection. Comput. Electron. Agric. 2020, 174, 105522. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Wang, R.; Jiao, L.; Xie, C.; Chen, P.; Du, J.; Li, R. S-RPN: Sampling-balanced region proposal network for small crop pest detection. Comput. Electron. Agric. 2021, 187, 106290. [Google Scholar] [CrossRef]
- Dong, S.; Wang, R.; Liu, K.; Jiao, L.; Li, R.; Du, J.; Teng, Y.; Wang, F. CRA-Net: A channel recalibration feature pyramid network for detecting small pests. Comput. Electron. Agric. 2021, 191, 106518. [Google Scholar] [CrossRef]
- Wu, X.; Zhan, C.; Lai, Y.K.; Cheng, M.M.; Yang, J. Ip102: A large-scale benchmark dataset for insect pest recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8787–8796. [Google Scholar]
- Pattnaik, G.; Shrivastava, V.K.; Parvathi, K. Transfer learning-based framework for classification of pest in tomato plants. Appl. Artif. Intell. 2020, 34, 981–993. [Google Scholar] [CrossRef]
- Ayan, E.; Erbay, H.; Varçın, F. Crop pest classification with a genetic algorithm-based weighted ensemble of deep convolutional neural networks. Comput. Electron. Agric. 2020, 179, 105809. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Thenmozhi, K.; Reddy, U.S. Crop pest classification based on deep convolutional neural network and transfer learning. Comput. Electron. Agric. 2019, 164, 104906. [Google Scholar] [CrossRef]
- Xie, C.; Wang, R.; Zhang, J.; Chen, P.; Dong, W.; Li, R.; Chen, T.; Chen, H. Multi-level learning features for automatic classification of field crop pests. Comput. Electron. Agric. 2018, 152, 233–241. [Google Scholar] [CrossRef]
- Wang, F.; Wang, R.; Xie, C.; Yang, P.; Liu, L. Fusing multi-scale context-aware information representation for automatic in-field pest detection and recognition. Comput. Electron. Agric. 2020, 169, 105222. [Google Scholar] [CrossRef]
- Li, R.; Wang, R.; Xie, C.; Liu, L.; Zhang, J.; Wang, F.; Liu, W. A coarse-to-fine network for aphid recognition and detection in the field. Biosyst. Eng. 2019, 187, 39–52. [Google Scholar] [CrossRef]
- Li, R.; Wang, R.; Zhang, J.; Xie, C.; Liu, L.; Wang, F.; Chen, H.; Chen, T.; Hu, H.; Jia, X.; et al. An effective data augmentation strategy for CNN-based pest localization and recognition in the field. IEEE Access 2019, 7, 160274–160283. [Google Scholar] [CrossRef]
- Du, J.; Liu, L.; Li, R.; Jiao, L.; Xie, C.; Wang, R. Towards Densely Clustered Tiny Pest Detection in the Wild Environment. Neurocomputing 2022, 490, 400–412. [Google Scholar] [CrossRef]
- Teng, Y.; Zhang, J.; Dong, S.; Zheng, S.; Liu, L. MSR-RCNN: A Multi-Class Crop Pest Detection Network Based on a Multi-Scale Super-Resolution Feature Enhancement Module. Front. Plant Sci. 2022, 13, 810546. [Google Scholar] [CrossRef]
- Qing, Y.; Xian, D.X.; Liu, Q.J.; Yang, B.J.; Diao, G.Q.; Jian, T. Automated counting of rice planthoppers in paddy fields based on image processing. J. Integr. Agric. 2014, 13, 1736–1745. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 9627–9636. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 6000–6010. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 August 2021; pp. 10012–10022. [Google Scholar]
- Ba, J.L.; Kiros, J.R.; Hinton, G.E. Layer normalization. arXiv 2016, arXiv:1607.06450. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Yu, X.; Gong, Y.; Jiang, N.; Ye, Q.; Han, Z. Scale match for tiny person detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Snowmass Village, CO, USA, 1–5 March 2020; pp. 1257–1265. [Google Scholar]
- Chen, X.; Fang, H.; Lin, T.Y.; Vedantam, R.; Gupta, S.; Dollár, P.; Zitnick, C.L. Microsoft coco captions: Data collection and evaluation server. arXiv 2015, arXiv:1504.00325. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Yu, J.; Jiang, Y.; Wang, Z.; Cao, Z.; Huang, T. Unitbox: An advanced object detection network. In Proceedings of the 24th ACM International Conference on Multimedia, Virtual Event, China, 20–24 October 2016; pp. 516–520. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Xu, J.; et al. MMDetection: Open mmlab detection toolbox and benchmark. arXiv 2019, arXiv:1906.07155. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pang, J.; Chen, K.; Shi, J.; Feng, H.; Ouyang, W.; Lin, D. Libra r-cnn: Towards balanced learning for object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 821–830. [Google Scholar]
- Zhang, S.; Chi, C.; Yao, Y.; Lei, Z.; Li, S.Z. Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 9759–9768. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6154–6162. [Google Scholar]
- Kong, T.; Sun, F.; Liu, H.; Jiang, Y.; Li, L.; Shi, J. Foveabox: Beyound anchor-based object detection. IEEE Trans. Image Process. 2020, 29, 7389–7398. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Images | Test Images | Training Aphids | Test Aphids | ||
|---|---|---|---|---|---|
 | Macrosiphum avenae | 2125 | 546 | 20,043 | 5203 |
 | Rhopalosiphum padi | 2093 | 507 | 23,074 | 5525 |
| Method | ||||||
|---|---|---|---|---|---|---|
| Other detectors | ||||||
| Faster R-CNN w/FPN [31] | 26.1 | 68.0 | 13.1 | 21.9 | 30.1 | 36.7 |
| Libra Faster R-CNN [43] | 25.5 | 64.9 | 13.2 | 21.1 | 29.9 | 30.8 |
| ATSS [44] | 26.9 | 69.8 | 13.4 | 22.4 | 31.4 | 33.3 |
| Cascade R-CNN [45] | 27.3 | 69.3 | 14.1 | 23.4 | 31.0 | 38.3 |
| FCOS [43] | 24.9 | 66.2 | 11.3 | 19.9 | 29.3 | 32.3 |
| RetinaNet [38] | 21.7 | 60.0 | 9.4 | 15.4 | 26.7 | 37.1 |
| FoveaBox [46] | 23.1 | 63.4 | 10.1 | 18.2 | 27.7 | 36.2 |
| CRA-Net [14] | 26.1 | 68.1 | 13.0 | 21.8 | 30.1 | 31.5 |
| DCTDet W/CCG [25] | 27.1 | 68.5 | 13.7 | 22.0 | 30.4 | 32.8 |
| Ours | ||||||
| TD-Det(RV) | 27.2 | 71.6 | 13.4 | 22.8 | 31.4 | 34.6 |
| TD-Det(PV) | 29.2 | 74.2 | 15.4 | 25.7 | 32.7 | 46.1 |
| Method | Training Time ( | Testing Time ( | (%) | (%) | P_training (%/s) | P_testing (%/s) | Parameters |
|---|---|---|---|---|---|---|---|
| Other detectors | |||||||
| FPN Faster R-CNN [31] | 0.111 | 0.048 | 68.0 | 36.7 | 6.13 | 14.17 | 41,353,306 |
| Libra R-CNN [43] | 0.118 | 0.050 | 64.9 | 37.4 | 5.50 | 12.98 | 41,616,474 |
| ATSS [44] | 0.106 | 0.048 | 69.8 | 40.3 | 6.59 | 14.54 | 32,115,532 |
| Cascade R-CNN [45] | 0.133 | 0.058 | 69.3 | 38.3 | 5.21 | 11.95 | 69,154,916 |
| FCOS [43] | 0.093 | 0.041 | 66.2 | 37.6 | 7.12 | 16.15 | 32,113,484 |
| RetinaNet [38] | 0.102 | 0.048 | 60.0 | 37.1 | 5.88 | 12.5 | 36,350,582 |
| FoveaBox [46] | 0.103 | 0.042 | 63.4 | 36.2 | 6.16 | 15.10 | 36,239,942 |
| CRA-Net [14] | 0.114 | 0.050 | 68.1 | 31.5 | 5.97 | 13.62 | 41,361,498 |
| DCTDet [25] | 0.280 | 0.213 | 68.5 | 32.8 | 2.45 | 3.22 | 84,706,732 |
| Ours | |||||||
| TD-Det(RV) | 0.075 | 0.045 | 71.6 | 41.9 | 9.55 | 15.91 | 33,032,012 |
| TD-Det(PV) | 0.116 | 0.100 | 74.2 | 46.1 | 6.40 | 7.42 | 33,097,804 |
| Method | T-FPN | |||
|---|---|---|---|---|
| Faster R-CNN [31] | 26.1 | 68.0 | 36.7 | |
| √ | 26.6 | 68.4 | 37.2 | |
| Libra R-CNN [43] | 25.5 | 64.9 | 37.4 | |
| √ | 25.9 | 65.4 | 37.7 | |
| Cascade R-CNN [45] | 27.3 | 69.3 | 38.3 | |
| √ | 27.4 | 69.7 | 38.2 | |
| FCOS [29] | 24.9 | 66.2 | 37.6 | |
| √ | 25.0 | 67.1 | 37.4 | |
| RetinaNet [38] | 21.7 | 60.0 | 37.1 | |
| √ | 22.0 | 60.9 | 37.0 | |
| FoveaBox [46] | 23.1 | 63.4 | 36.2 | |
| √ | 23.5 | 64.5 | 36.3 |
| Method | MTM | Training Time (s/iter) | Test Time (s/img) | ||
|---|---|---|---|---|---|
| Faster R-CNN [31] | 68.0 | 36.7 | 0.111 | 0.048 | |
| √ | 68.5 | 37.2 | 0.079 | 0.047 | |
| Libra R-CNN [43] | 64.9 | 37.4 | 0.118 | 0.050 | |
| √ | 66.2 | 38.3 | 0.084 | 0.050 | |
| Cascade R-CNN [45] | 69.3 | 38.3 | 0.133 | 0.058 | |
| √ | 69.4 | 38.5 | 0.102 | 0.058 | |
| FCOS [29] | 66.2 | 37.6 | 0.093 | 0.041 | |
| √ | 69.3 | 38.9 | 0.062 | 0.040 | |
| RetinaNet [38] | 60.0 | 37.1 | 0.102 | 0.048 | |
| √ | 62.8 | 38.2 | 0.072 | 0.048 | |
| FoveaBox [46] | 63.4 | 36.2 | 0.103 | 0.042 | |
| √ | 66.5 | 37.5 | 0.071 | 0.042 |
| Resnet50 | Resnet101 | Resnext50 | Resnext101 | |
|---|---|---|---|---|
| 74.2 | 74.0 | 73.2 | 72.9 | |
| 15.4 | 14.5 | 14.4 | 13.9 | |
| 29.2 | 29.1 | 28.6 | 28.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, Y.; Wang, R.; Du, J.; Huang, Z.; Zhou, Q.; Jiao, L. TD-Det: A Tiny Size Dense Aphid Detection Network under In-Field Environment. Insects 2022, 13, 501. https://doi.org/10.3390/insects13060501
Teng Y, Wang R, Du J, Huang Z, Zhou Q, Jiao L. TD-Det: A Tiny Size Dense Aphid Detection Network under In-Field Environment. Insects. 2022; 13(6):501. https://doi.org/10.3390/insects13060501
Chicago/Turabian StyleTeng, Yue, Rujing Wang, Jianming Du, Ziliang Huang, Qiong Zhou, and Lin Jiao. 2022. "TD-Det: A Tiny Size Dense Aphid Detection Network under In-Field Environment" Insects 13, no. 6: 501. https://doi.org/10.3390/insects13060501
APA StyleTeng, Y., Wang, R., Du, J., Huang, Z., Zhou, Q., & Jiao, L. (2022). TD-Det: A Tiny Size Dense Aphid Detection Network under In-Field Environment. Insects, 13(6), 501. https://doi.org/10.3390/insects13060501