
Adaptive Control of Chaotic Signals: Investigated by Simulation Software and Real Electronic Circuits


Abstract
:1. Introduction
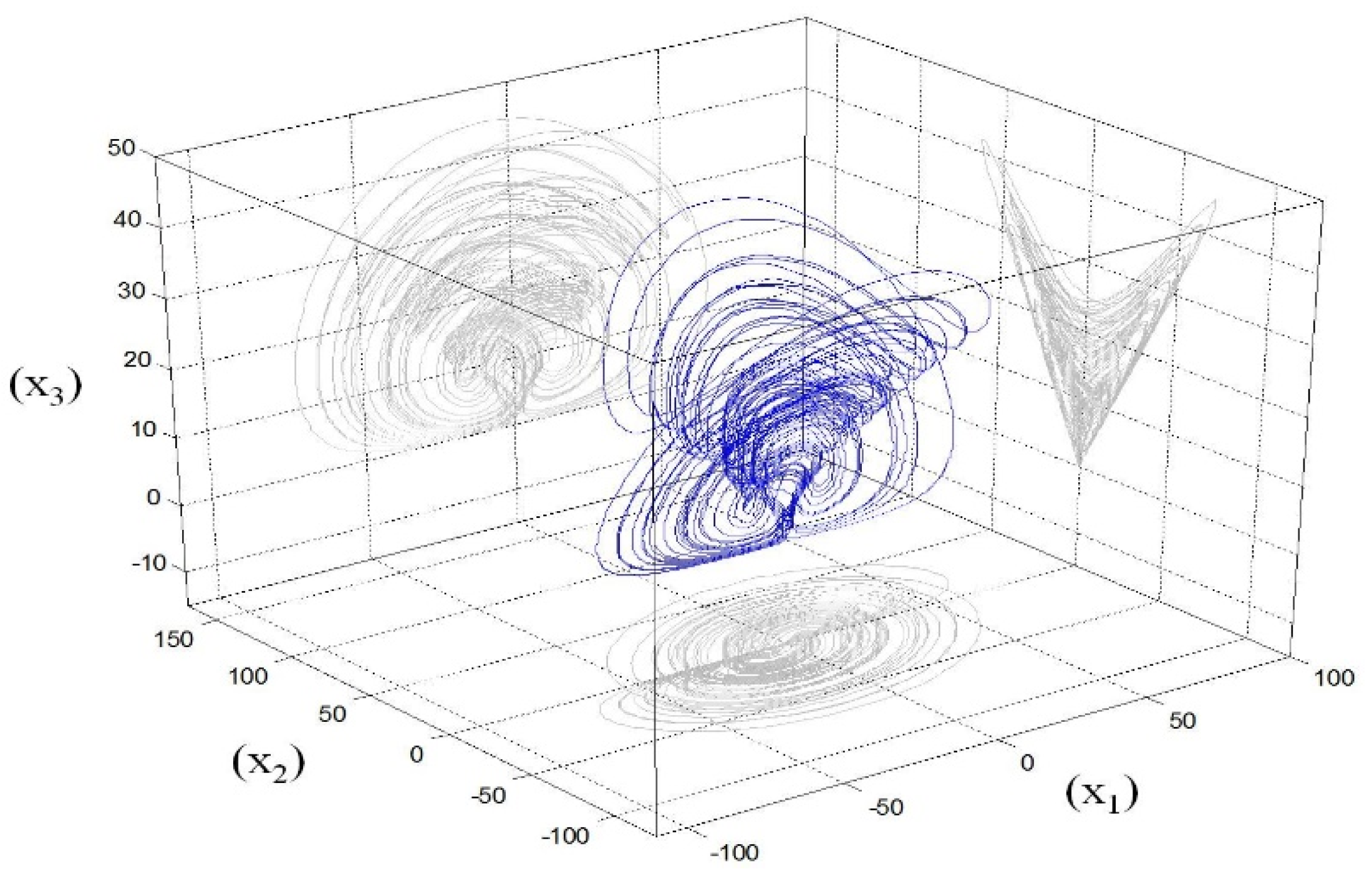
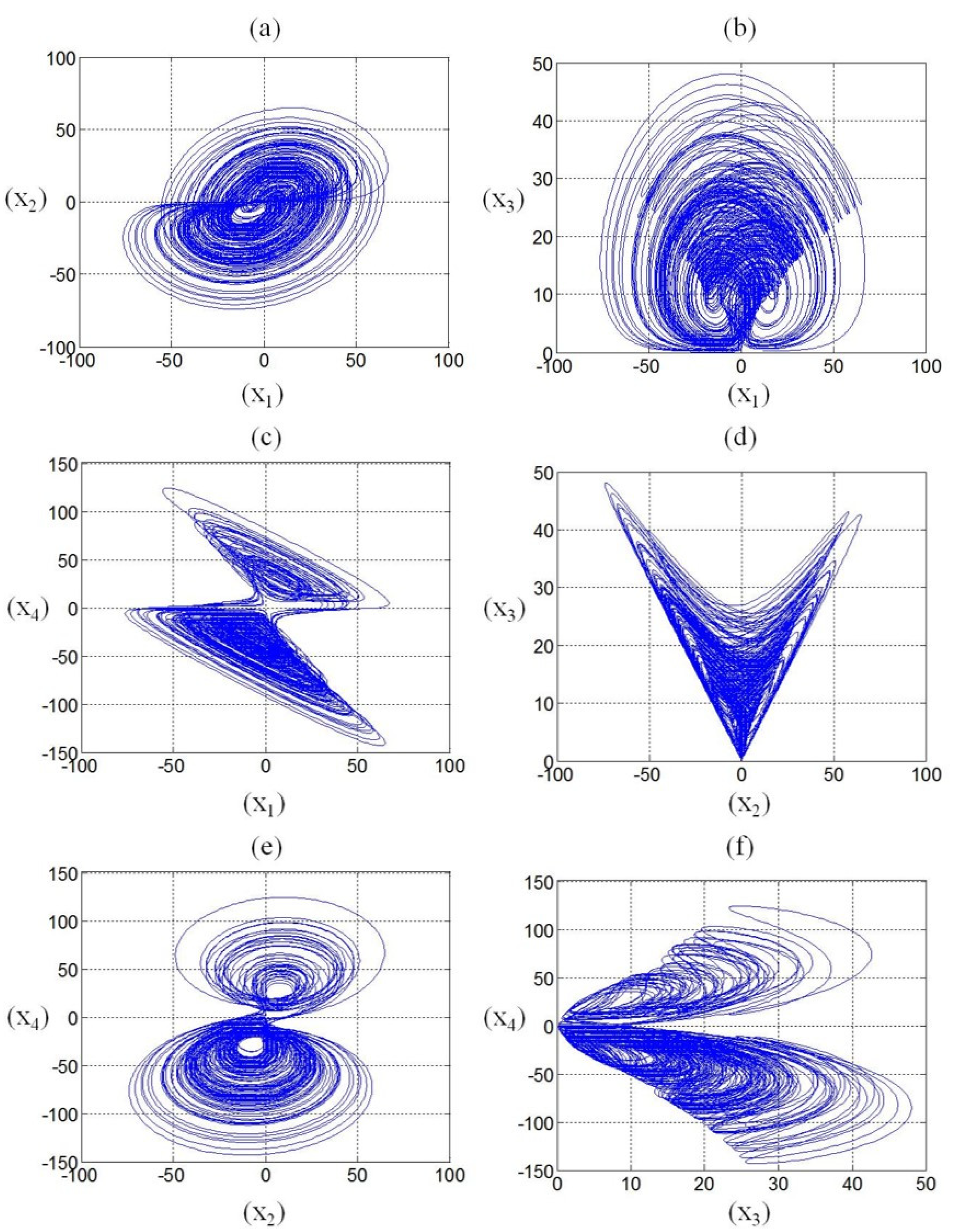
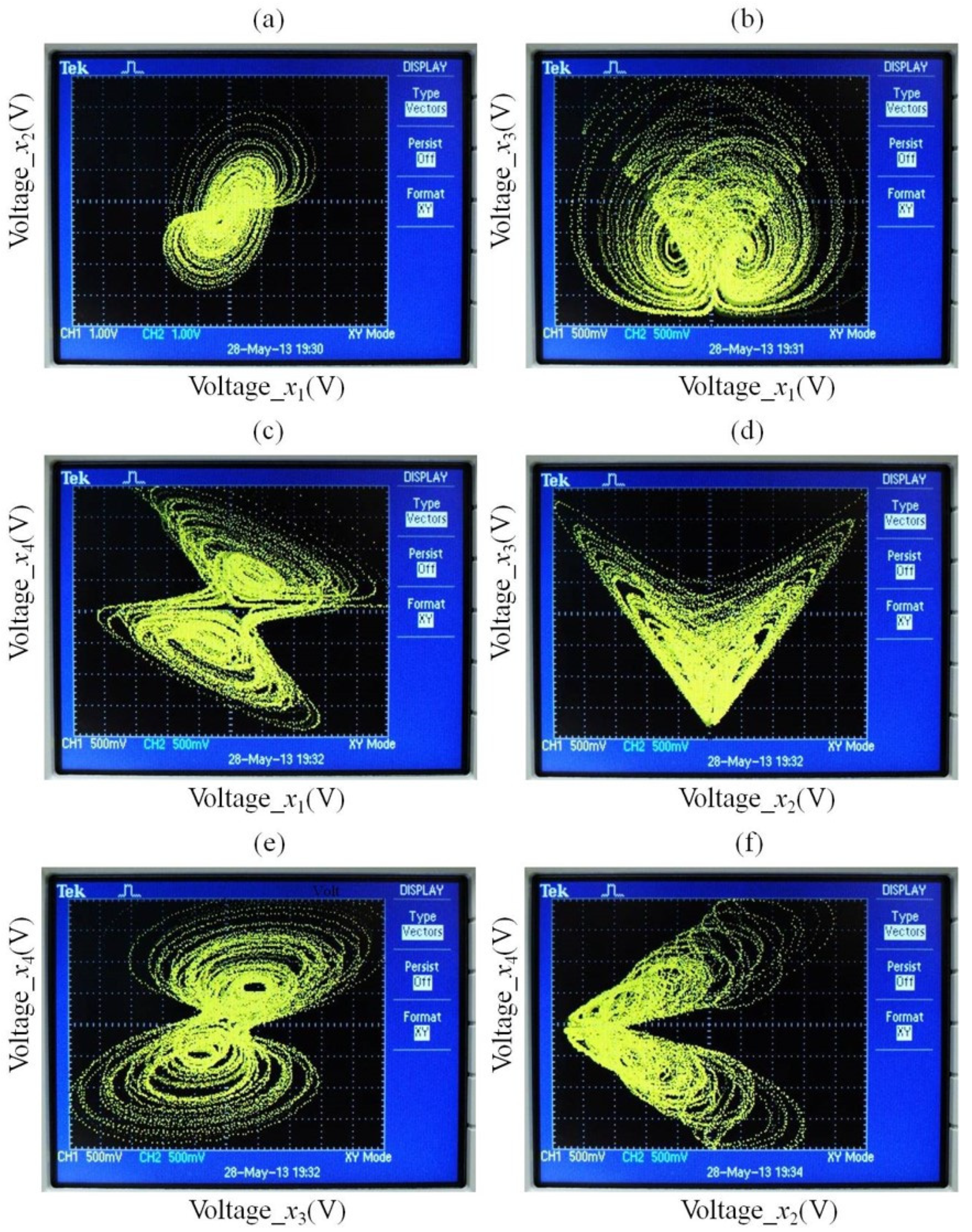
2. Chaotic Behavior Expression of the Four-Dimensional Chen–Lee System
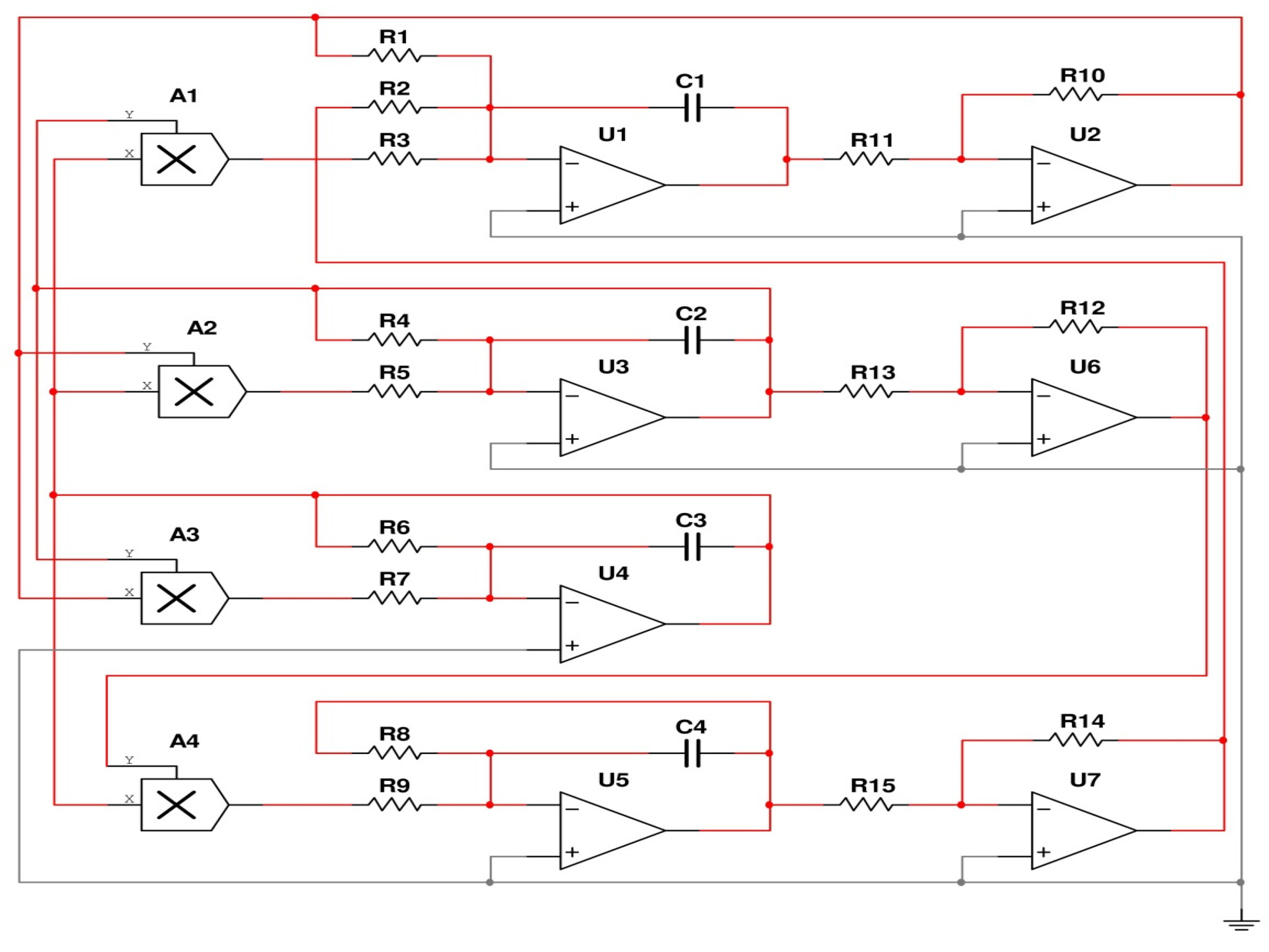
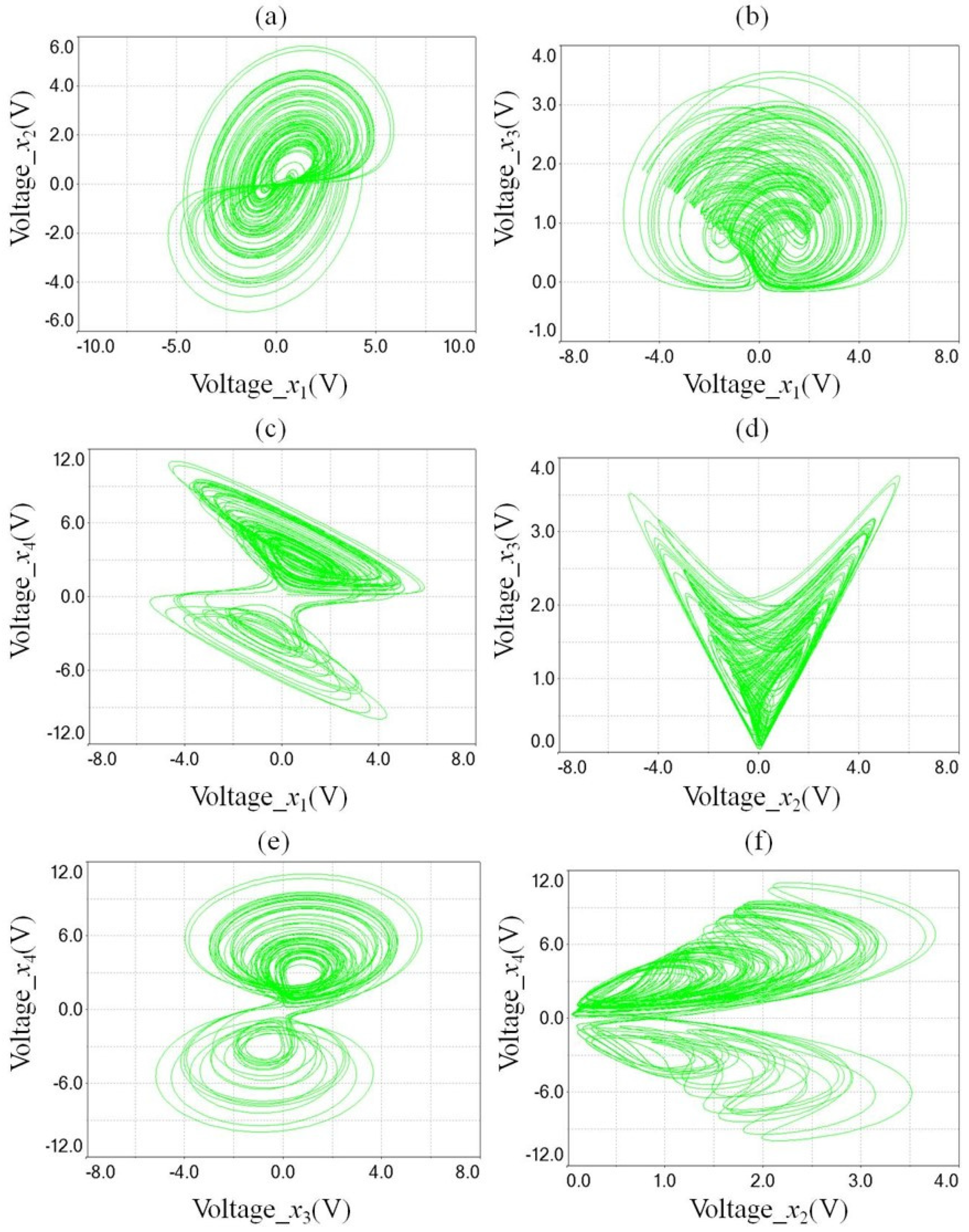
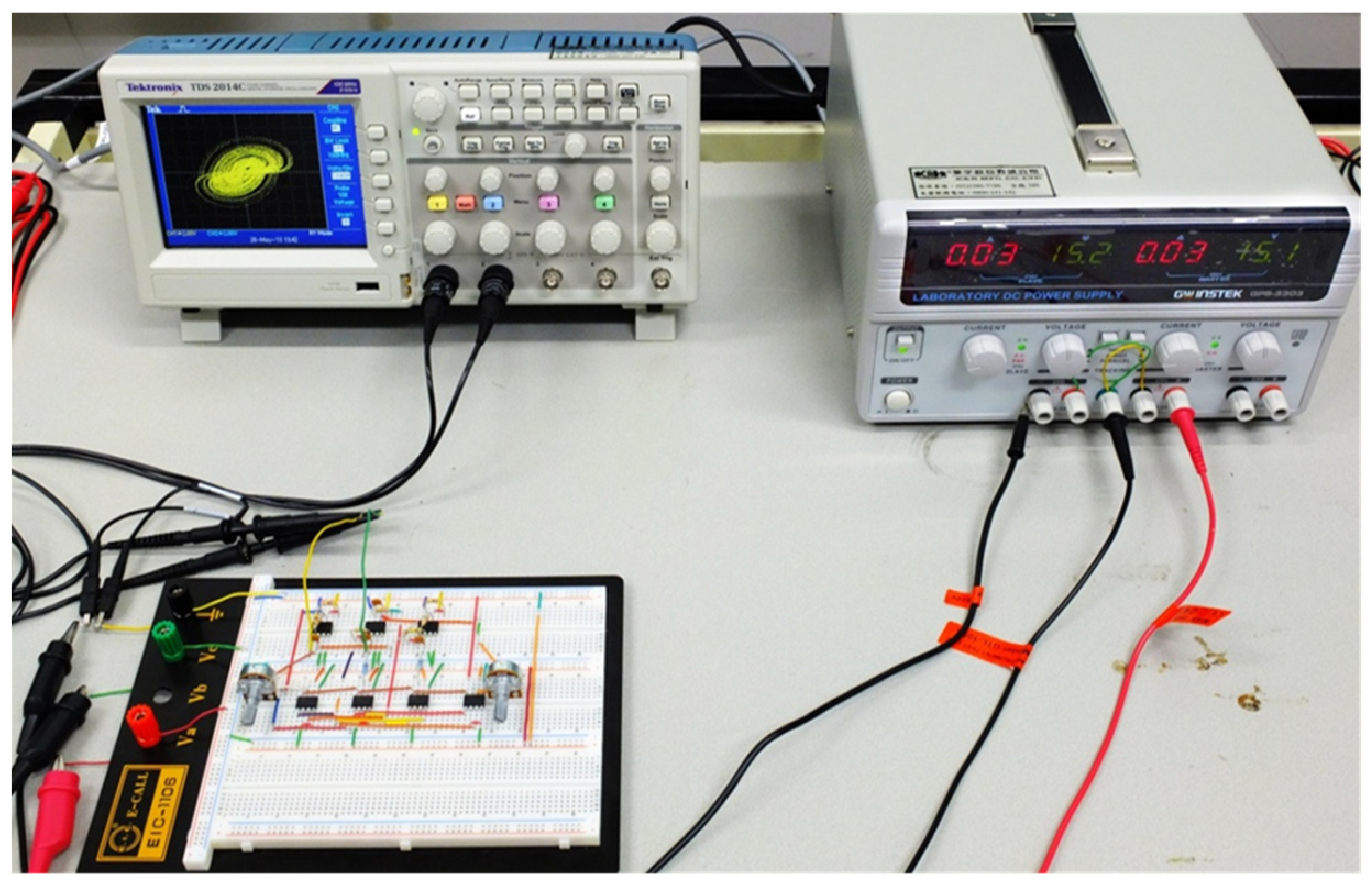
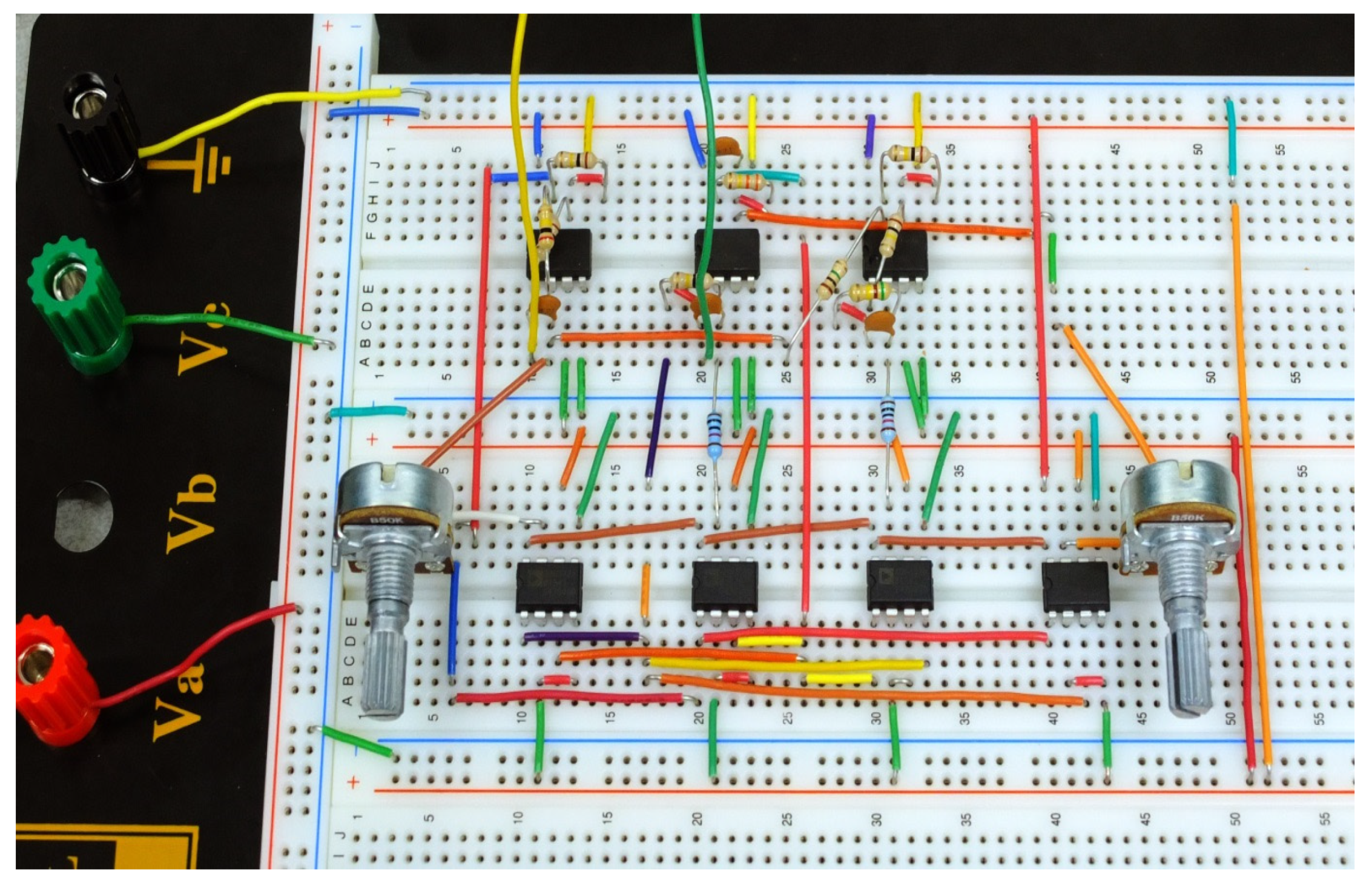
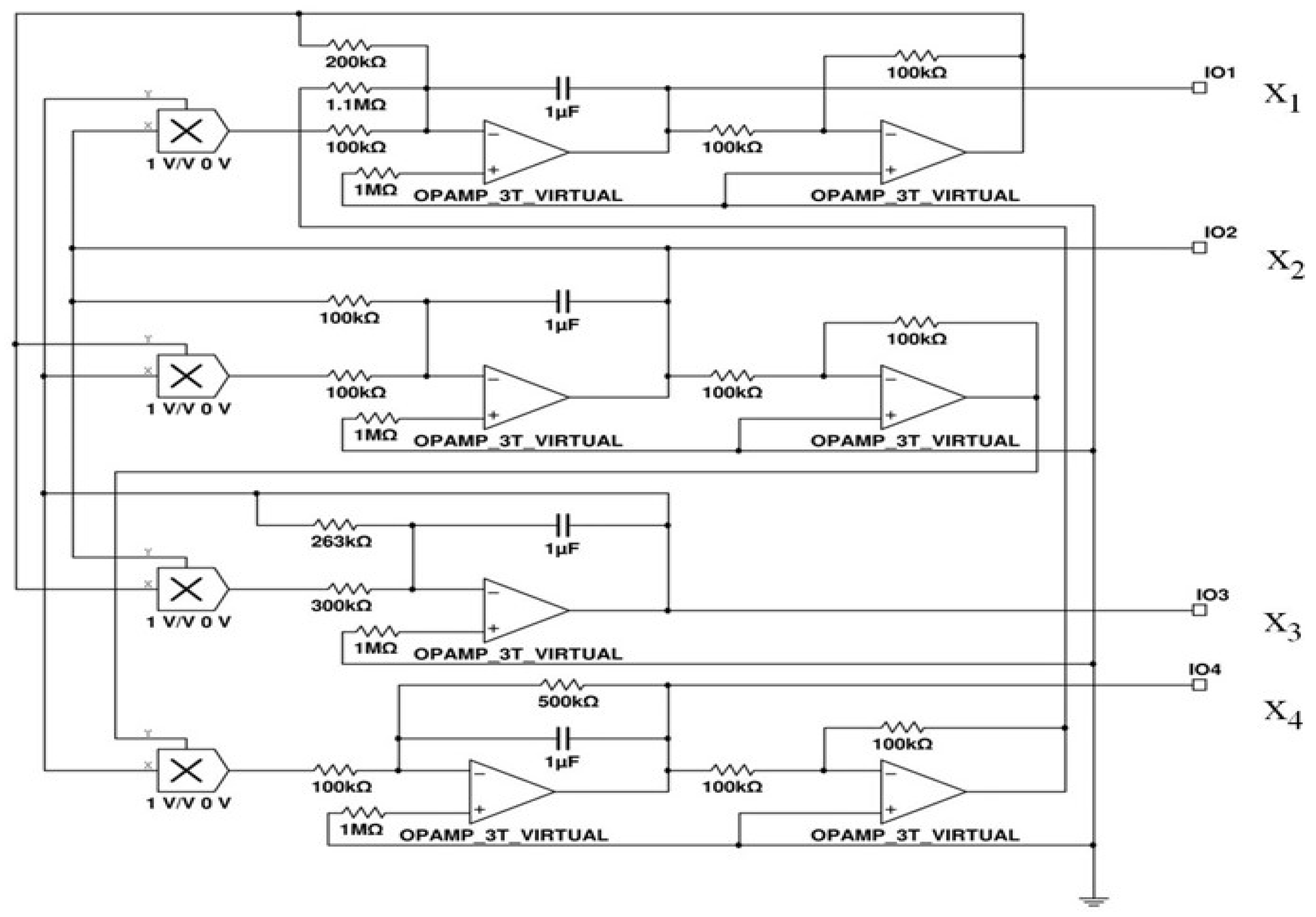
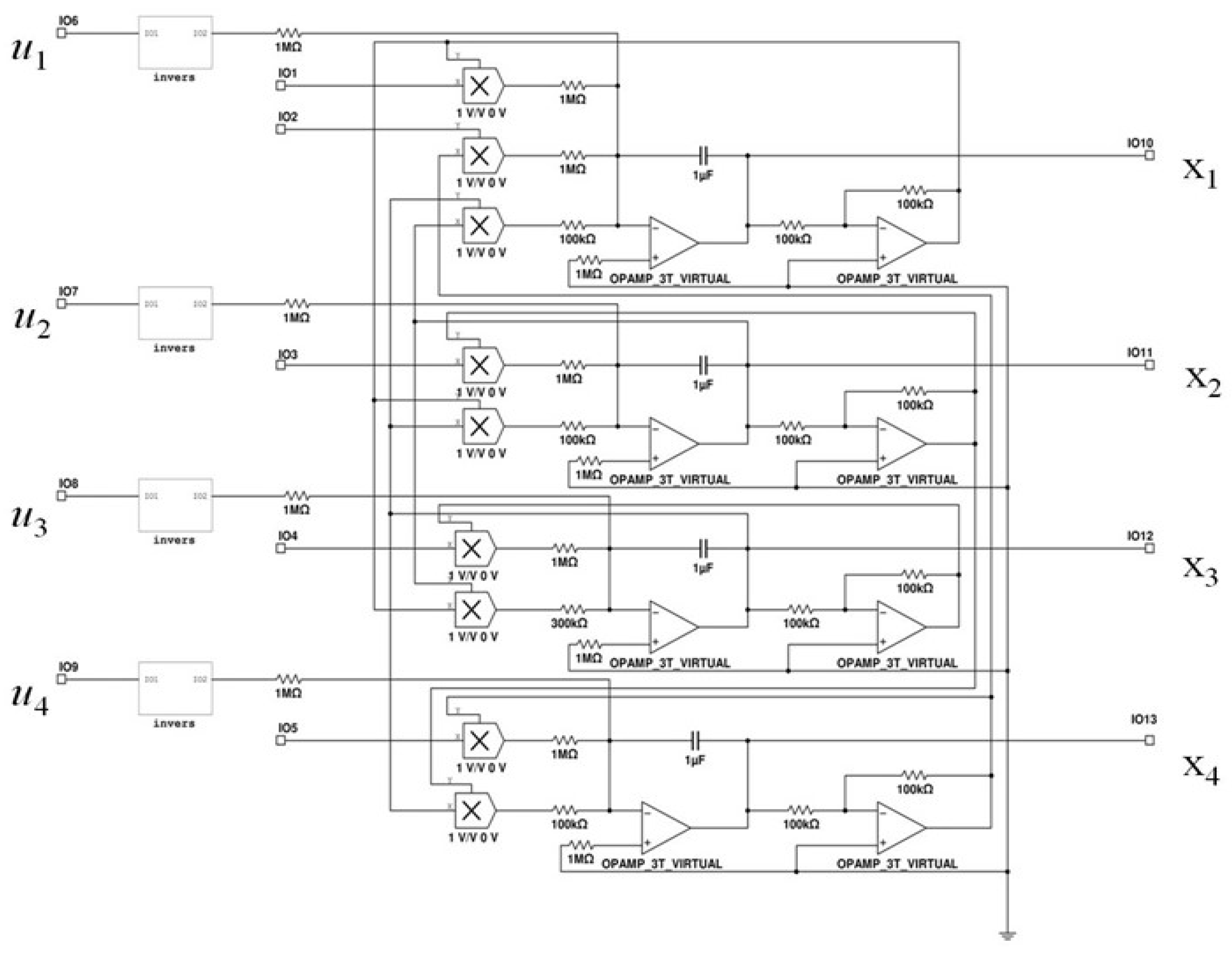
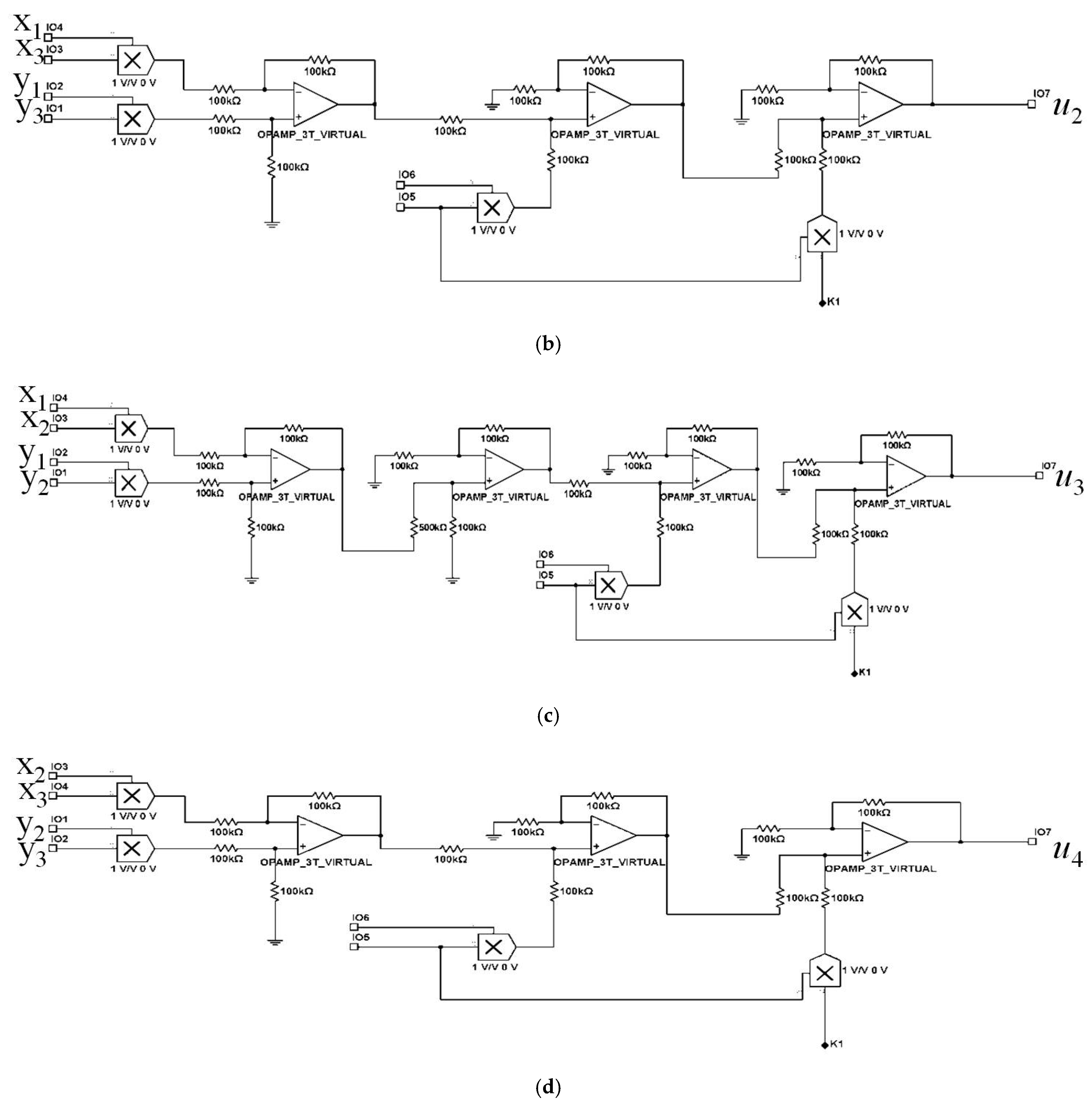
3. Implementation on Electronic Circuit—Software Simulation and Hardware Configurations
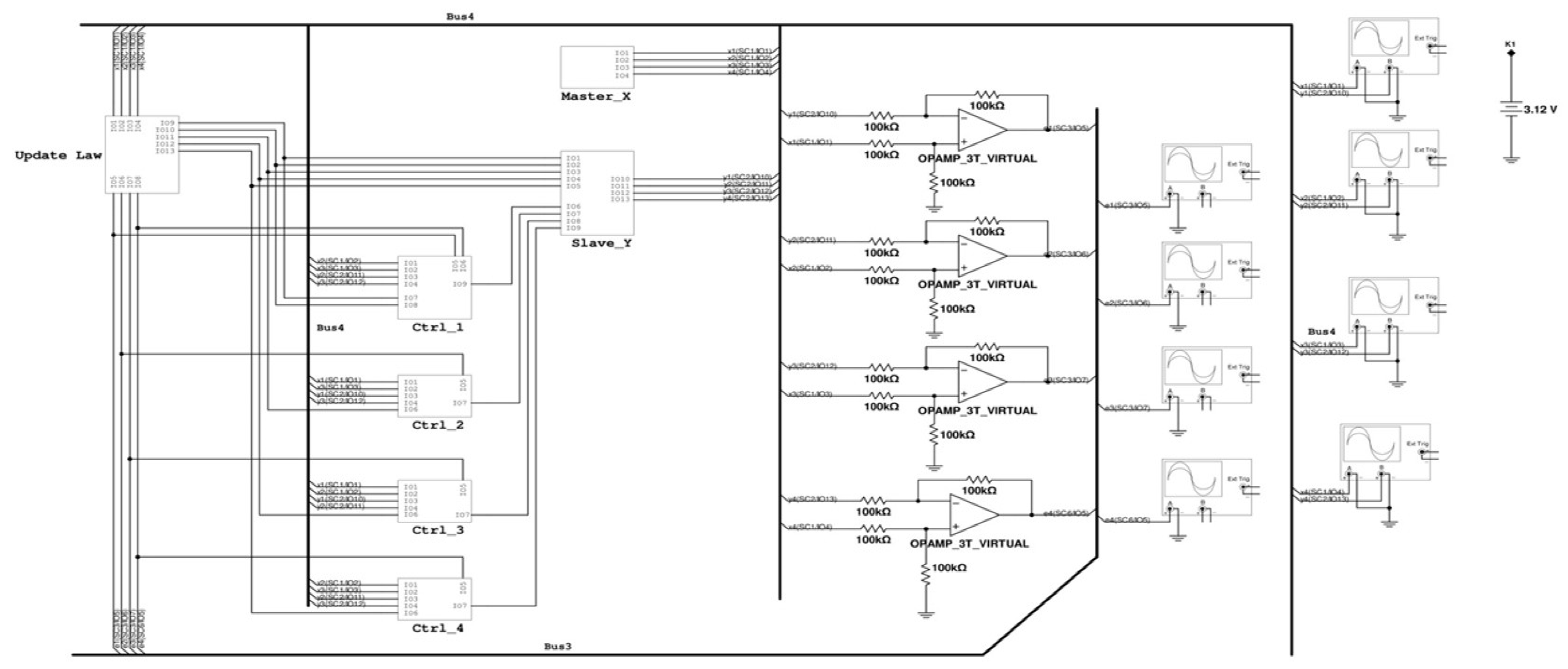
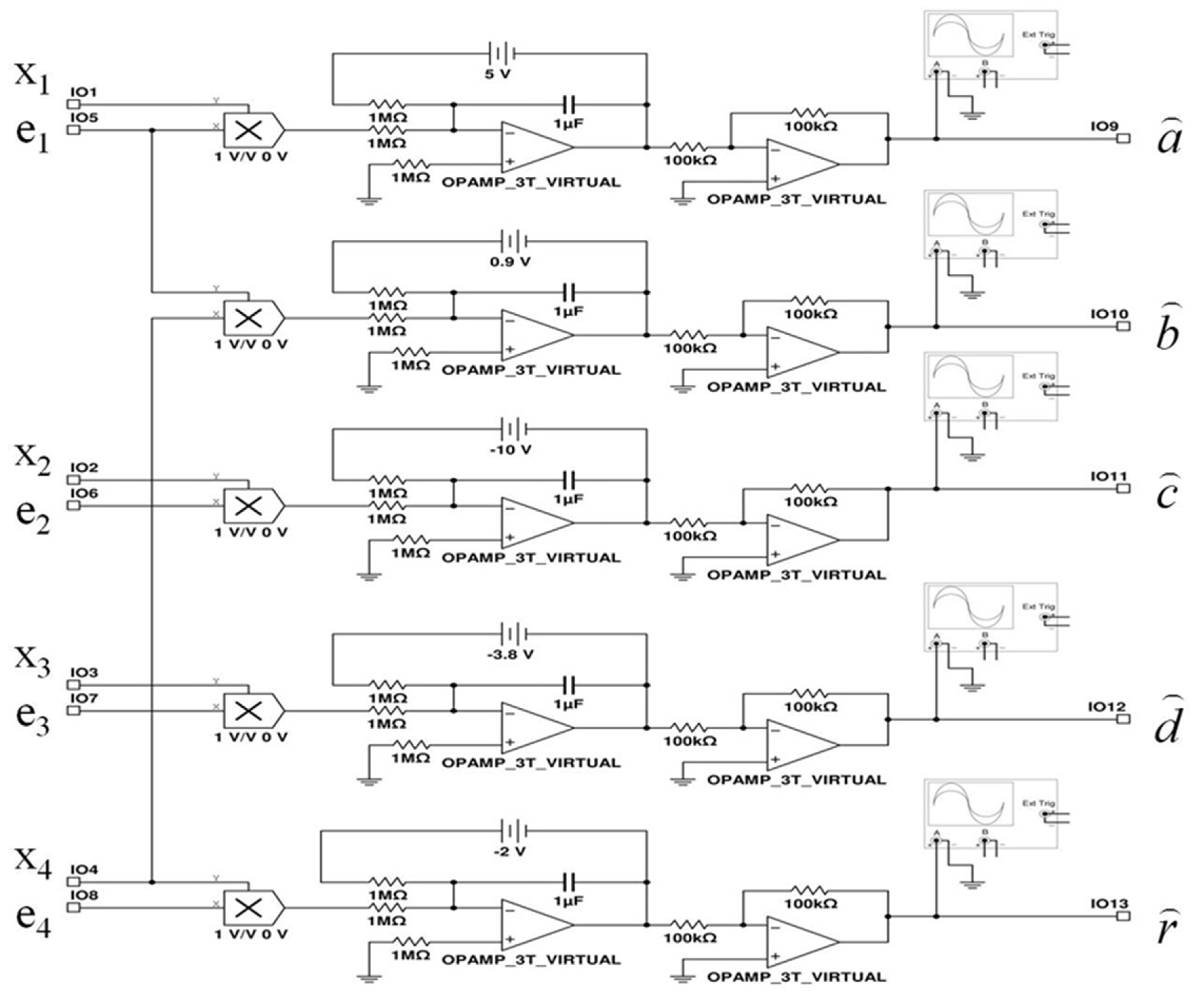
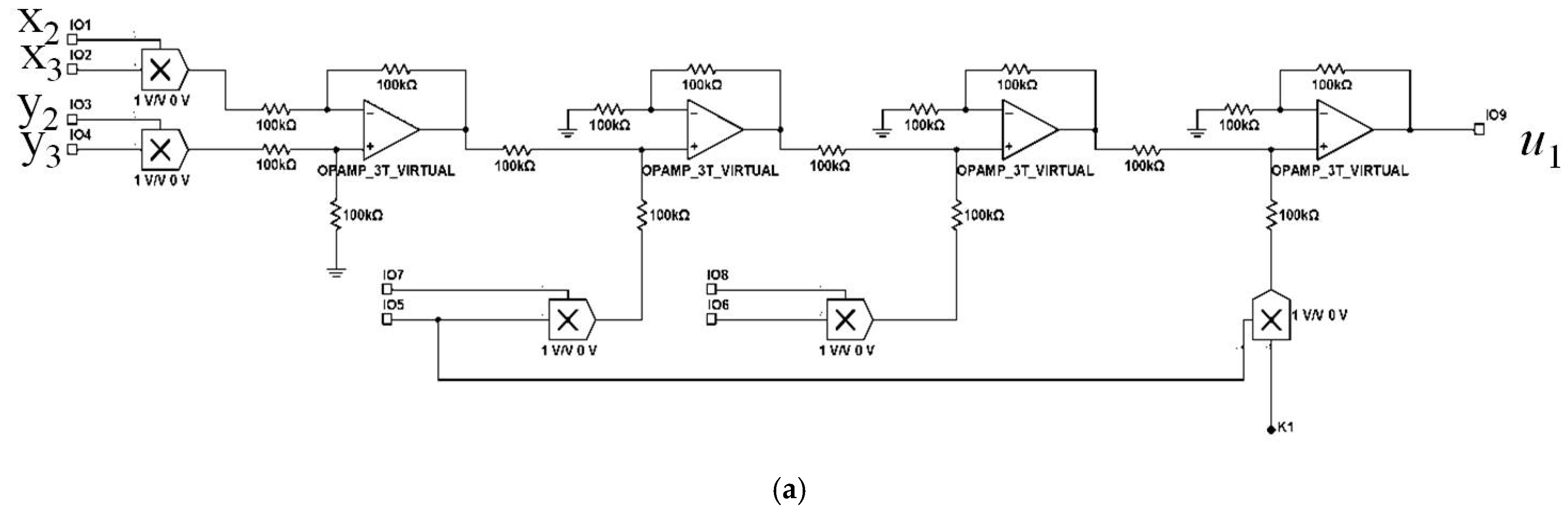
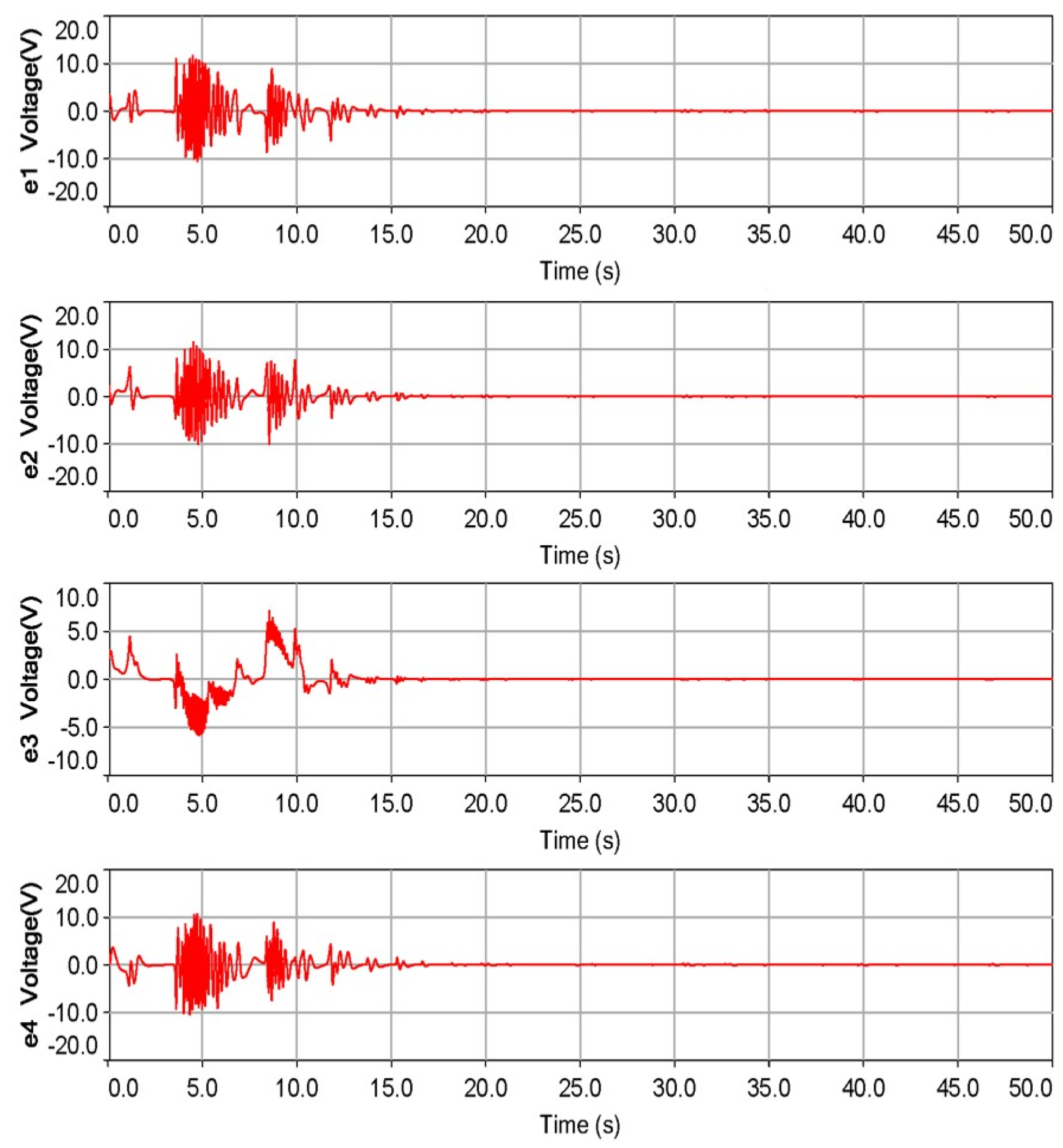
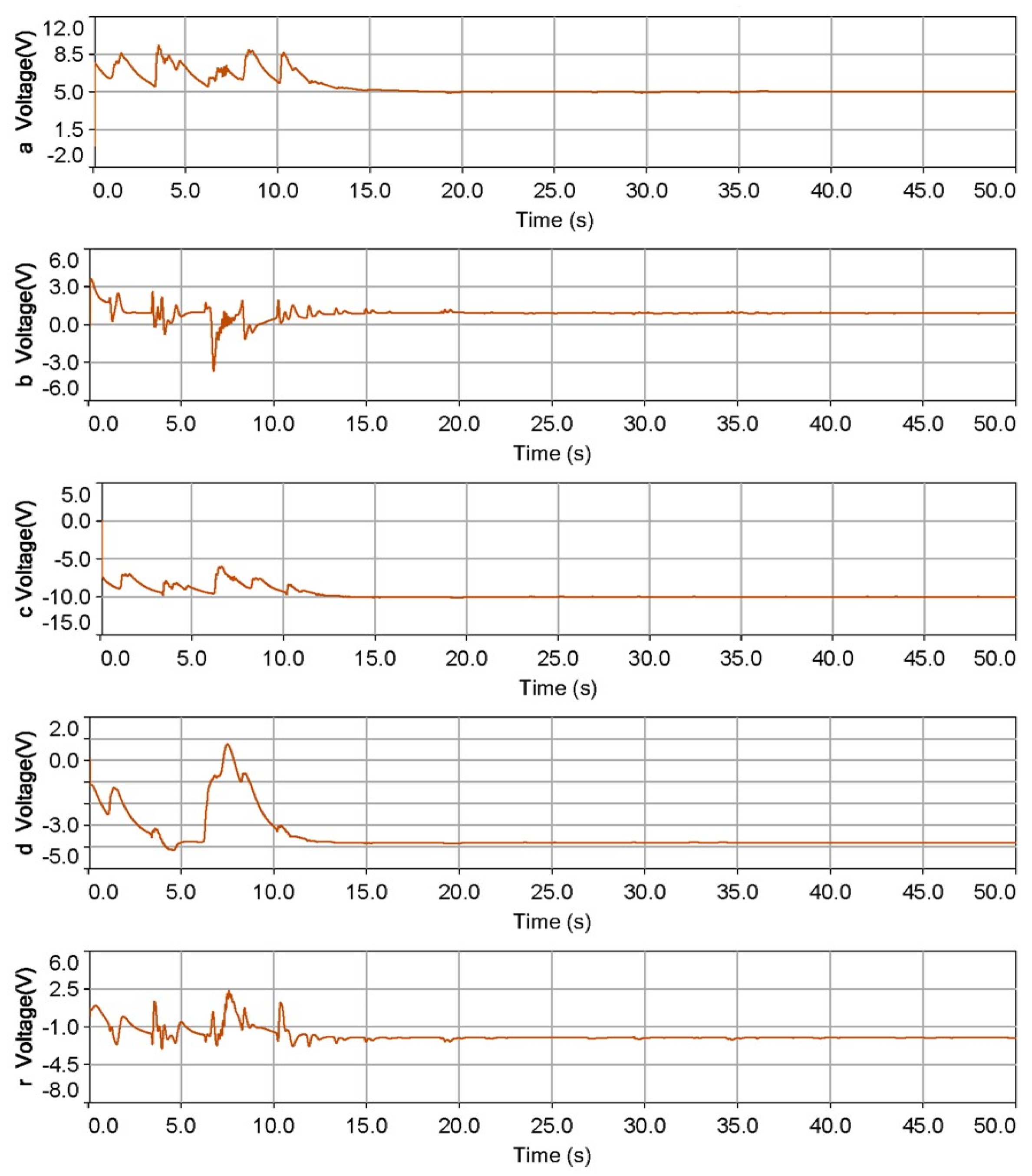
4. Adaptive Synchronization of the Four-Dimensional Chen–Lee System on Electronic Circuits
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cena, G.; Bertolotti, I.C.; Scanzio, S.; Valenzano, A.; Zunino, C. Synchronize Your Watches: Part II: Special-Purpose Solutions for Distributed Real-Time Control. IEEE Ind. Electron. Mag. 2013, 7, 27–39. [Google Scholar] [CrossRef]
- Li, R. A note on decay of correlation implies chaos in the sense of Devaney. Appl. Math. Model. 2015, 39, 6705–6710. [Google Scholar] [CrossRef]
- Pan, I.; Das, S.; Routh, A. Towards a global controller design for guaranteed synchronization of switched chaotic systems. Appl. Math. Model. 2015, 39, 2311–2331. [Google Scholar] [CrossRef]
- Tam, L.-M.; Lao, S.-K.; Sheu, L.-J.; Chen, H.-K. Impulsive Synchronization and Its Implementation in Chen–Lee Systems. Int. J. Mod. Phys. B 2011, 25, 3893–3903. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Shi, P. Output-Feedback Based Sliding Mode Control for Fuzzy Systems with Actuator Saturation. IEEE Trans. Fuzzy Syst. 2016, 24, 1282–1293. [Google Scholar] [CrossRef]
- Li, S.Y.; Tam, L.M.; Tsai, S.E.; Ge, Z.M. Novel Fuzzy Modeling and Synchronization of Chaotic Systems with Multinon-linear Terms by Advanced Ge-Li Fuzzy Model. IEEE Trans. Cybern. Seb. 2015, 46, 2228–2237. [Google Scholar] [CrossRef]
- Trcala, M. Spectral stochastic modeling of uncertainties in nonlinear diffusion problems of moisture transfer in wood. Appl. Math. Model. 2015, 39, 1740–1748. [Google Scholar] [CrossRef]
- Wang, X.; Chen, Y.; Han, G.; Song, C. Nonlinear dynamic analysis of a single-machine infinite-bus power system. Appl. Math. Model. 2015, 39, 2951–2961. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Wu, L.; Lam, H.-K.; Du, H. Event-Triggered Fault Detection of Nonlinear Networked Systems. IEEE Trans. Cybern. 2016, 47, 1041–1052. [Google Scholar] [CrossRef] [Green Version]
- Gholipour, R.; Khosravi, A.; Mojallali, H. Multi-objective optimal backstepping controller design for chaos control in a rod-type plasma torch system using Bees algorithm. Appl. Math. Model. 2015, 39, 4432–4444. [Google Scholar] [CrossRef]
- Pan, I.; Das, S.; Das, S. Multi-objective active control policy design for commensurate and incommensurate fractional or-der chaotic financial systems. Appl. Math. Model. 2015, 39, 500–514. [Google Scholar] [CrossRef]
- Liang, S.; Wu, R.; Chen, L. Comparison principles and stability of nonlinear fractional-order cellular neural networks with multiple time delays. Neurocomputing 2015, 168, 618–625. [Google Scholar] [CrossRef]
- Nana, B.; Woafo, P. Chaotic masking of communication in an emitter–relay–receiver electronic setup. Nonlinear Dyn. 2015, 82, 899–908. [Google Scholar] [CrossRef]
- Abedini, M.; Gomroki, M.; Salarieh, H.; Meghdari, A. Identification of 4D Lü hyper-chaotic system using identical sys-tems synchronization and fractional adaptation law. Appl. Math. Modell. 2014, 38, 4652–4661. [Google Scholar] [CrossRef]
- Lin, C.-J.; Su, X.-Y.; Yu, K.-T.; Jian, B.-L.; Yau, H.-T. Inspection on Ball Bearing Malfunction by Chen-Lee Chaos System. IEEE Access 2020, 8, 28267–28275. [Google Scholar] [CrossRef]
- Li, S.-Y.; Gu, K.-R. A smart fault-detection approach with feature production and extraction processes. Inf. Sci. 2020, 513, 553–564. [Google Scholar] [CrossRef]
- Li, S.-Y.; Gu, K.-R.; Huang, S.-C. A chaotic system-based signal identification Technology: Fault-diagnosis of industrial bearing system. Measurement 2021, 171, 108832. [Google Scholar] [CrossRef]
- Anees, A.; Siddiqui, A.M.; Ahmed, F. Chaotic substitution for highly autocorrelated data in encryption algorithm. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3106–3118. [Google Scholar] [CrossRef]
- Sadeghian, H.; Salarieh, H.; Alasty, A.; Meghdari, A. On the fractional-order extended Kalman filter and its application to chaotic cryptography in noisy environment. Appl. Math. Model. 2014, 38, 961–973. [Google Scholar] [CrossRef]
- Li, S.Y.; Hernández, M.A.B.; Tam, L.M.; Chen, C.S. A Cloud Image Data Protection Algorithm with Multi-Level Encryption Scheme and Automated-Selection Mechanism. Appl. Sci. 2019, 9, 5146. [Google Scholar] [CrossRef] [Green Version]
- Schimmack, M.; Costa, M.L.; Mercorelli, P. Comparing Two Voltage Observers in a Sensorsystem using Repetitive Control. IFAC-PapersOnLine 2016, 49, 7–11. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C.; Mercorelli, P. Global Finite-Time Stabilization of Planar Linear Systems with Actuator Saturation. IEEE Trans. Circuits Syst. II Express Briefs 2016, 64, 947–951. [Google Scholar] [CrossRef]
- Braune, S.; Liu, S.; Mercorelli, P. Design and control of an electromagnetic valve actuator. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 1657–1662. [Google Scholar]
- Mercorelli, P.; Werner, N. An Adaptive Resonance Regulator Design for Motion Control of Intake Valves in Camless Engine Systems. IEEE Trans. Ind. Electron. 2016, 64, 3413–3422. [Google Scholar] [CrossRef]
- Murali, K.; Yu, H.; Varadan, V.; Leung, H. Secure communication using a chaos based signal encryption scheme. IEEE Trans. Consum. Electron. 2001, 47, 709–714. [Google Scholar] [CrossRef]
- Nguyen, N.; Pham-Nguyen, L.; Nguyen, M.B.; Kaddoum, G. A Low Power Circuit Design for Chaos-Key Based Data En-cryption. IEEE Access 2020, 8, 104432–104444. [Google Scholar] [CrossRef]
- Chen, J.-J.; Yan, D.-W.; Duan, S.-K.; Wang, L.-D. Memristor-based hyper-chaotic circuit for image encryption. Chin. Phys. B 2020, 29, 110504. [Google Scholar] [CrossRef]
- Mohamed, G.; Nessrine, A.; Mohamed, A.H.; Jihene, M.; Abdellatif, M. Improved Chaos-Based Cryptosystem for Medical Image Encryption and Decryption. Scient. Program. 2020, 2020, 1–22. [Google Scholar]
- Baby, H.T.; Sujatha, B.R. Voice and Text Encryption using Chaotic Circuits. Int. J. Innovat. Tech. Explor. Eng. 2020, 9, 1181–1184. [Google Scholar]
- Chen, H.-K.; Lee, C.-I. Anti-control of chaos in rigid body motion. Chaos Solitons Fractals 2004, 21, 957–965. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Apparatus/Components | Model | Quantity |
|---|---|---|
| DC Power Supply | GPS-3303 | 1 |
| Oscilloscope | TDS2014C | 1 |
| OP-Amplifier | LF412CN | 4 |
| Multiplier | AD633 | 4 |
| Capacitor | 417 uF | 4 |
| Resister | 100 KΩ 204 KΩ 267 KΩ Variable resistor 50 K Ω | 11 1 1 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.-H.; Chang, C.-L.; Li, S.-Y. Adaptive Control of Chaotic Signals: Investigated by Simulation Software and Real Electronic Circuits. Actuators 2021, 10, 284. https://doi.org/10.3390/act10110284
Yang C-H, Chang C-L, Li S-Y. Adaptive Control of Chaotic Signals: Investigated by Simulation Software and Real Electronic Circuits. Actuators. 2021; 10(11):284. https://doi.org/10.3390/act10110284
Chicago/Turabian StyleYang, Cheng-Hsiung, Che-Lun Chang, and Shih-Yu Li. 2021. "Adaptive Control of Chaotic Signals: Investigated by Simulation Software and Real Electronic Circuits" Actuators 10, no. 11: 284. https://doi.org/10.3390/act10110284
APA StyleYang, C. -H., Chang, C. -L., & Li, S. -Y. (2021). Adaptive Control of Chaotic Signals: Investigated by Simulation Software and Real Electronic Circuits. Actuators, 10(11), 284. https://doi.org/10.3390/act10110284