
Development and Evaluation of Energy-Saving Electro-Hydraulic Actuator



Abstract
:1. Introduction
2. Proposed Energy Saving Hydraulic System
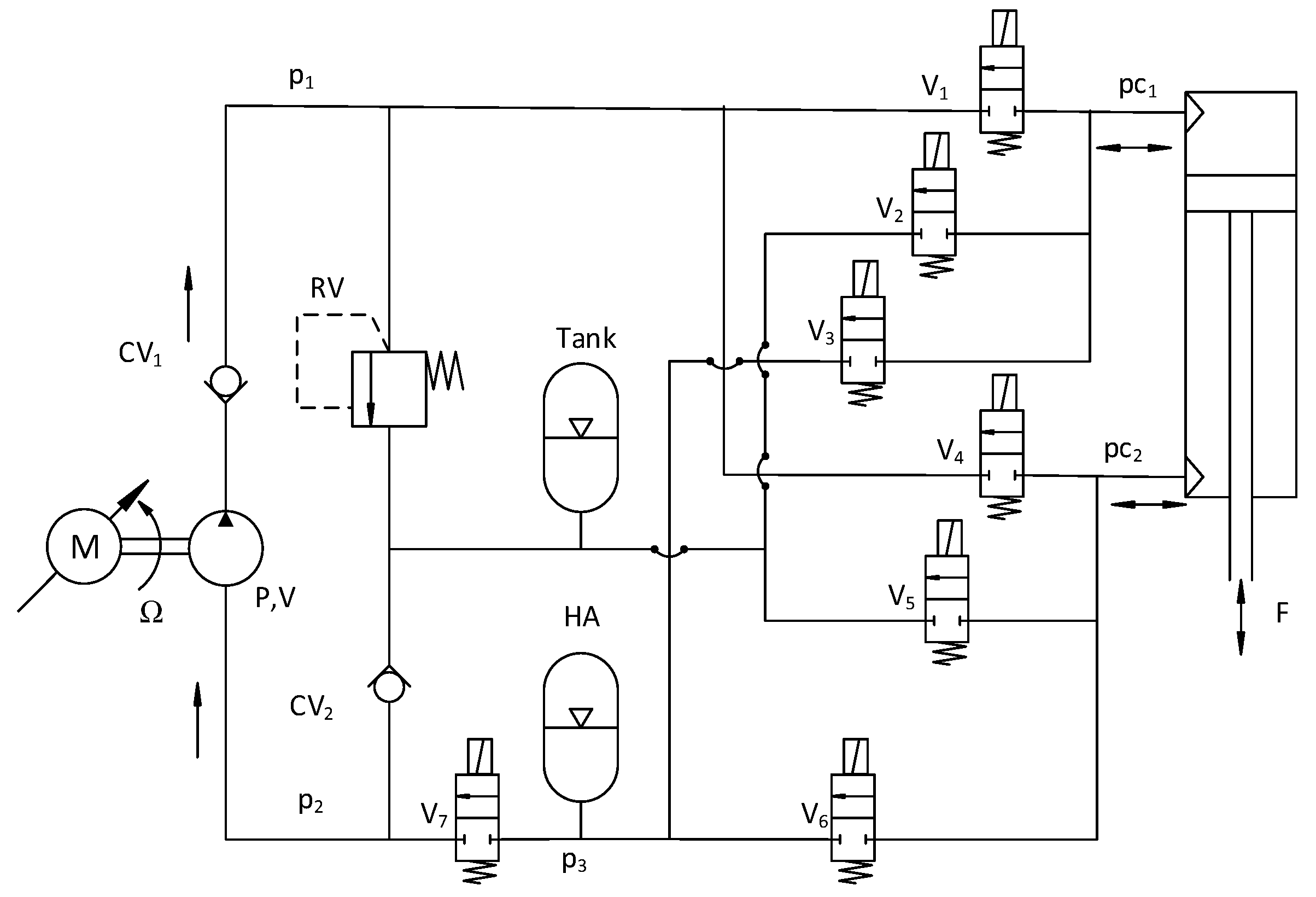
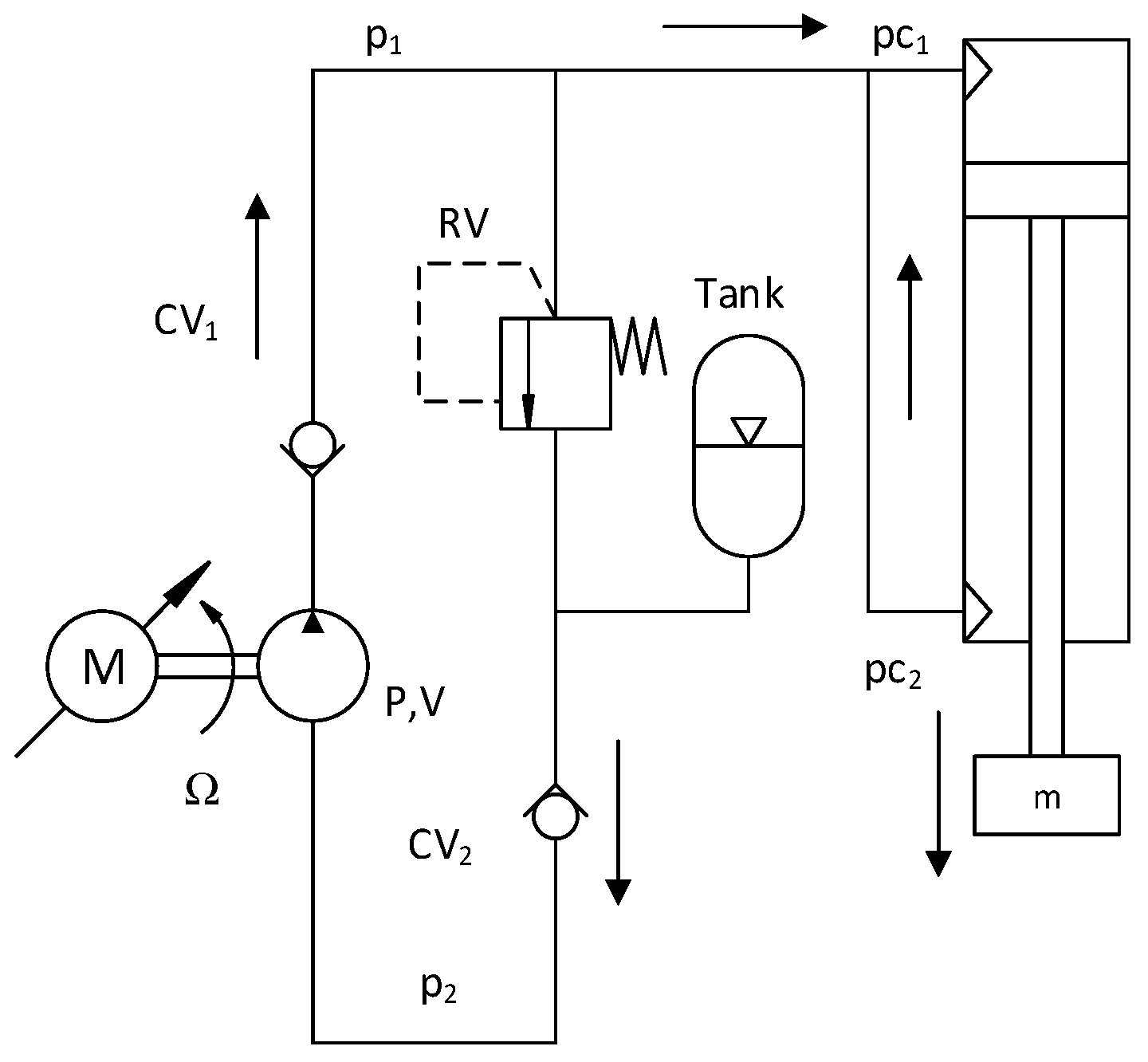
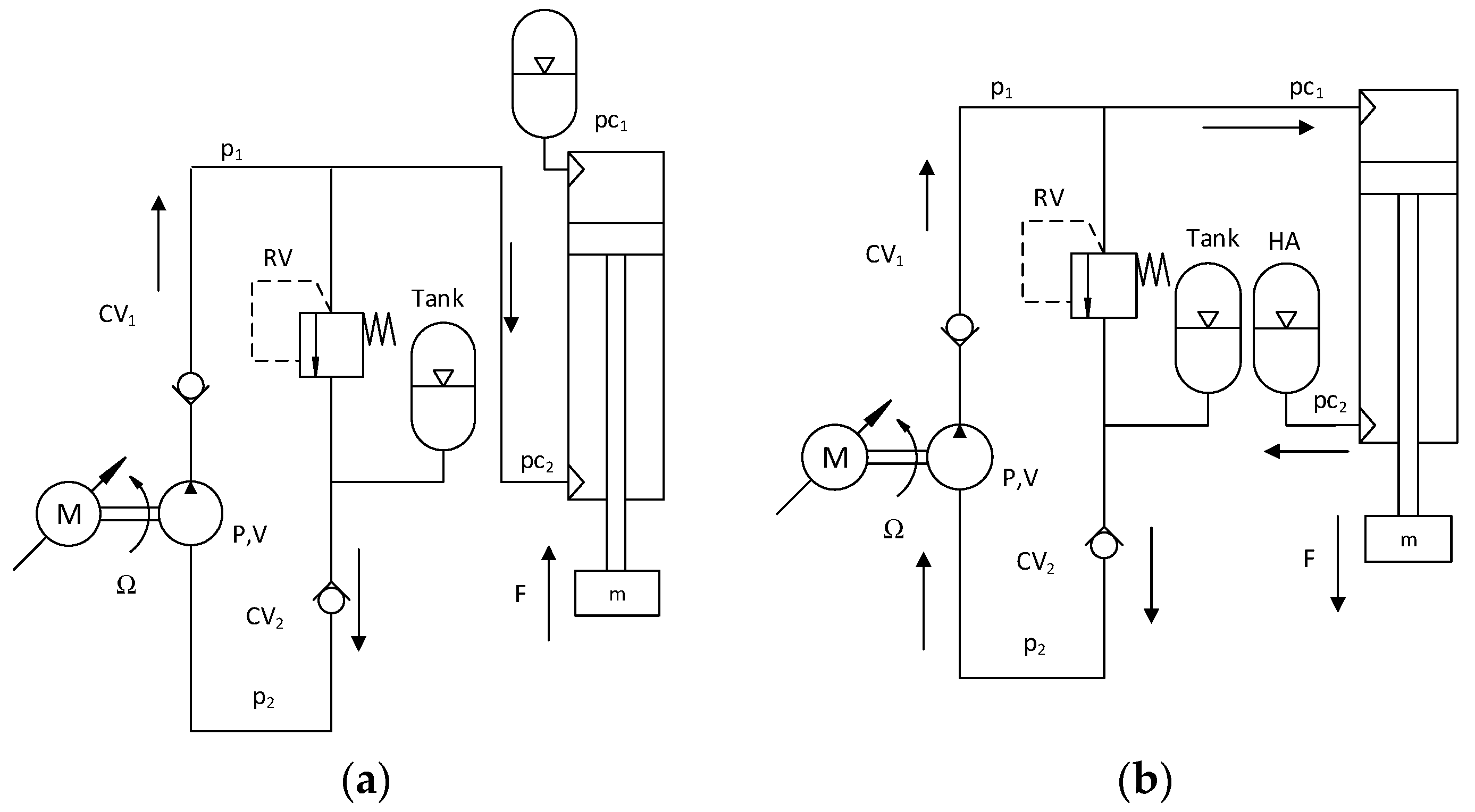
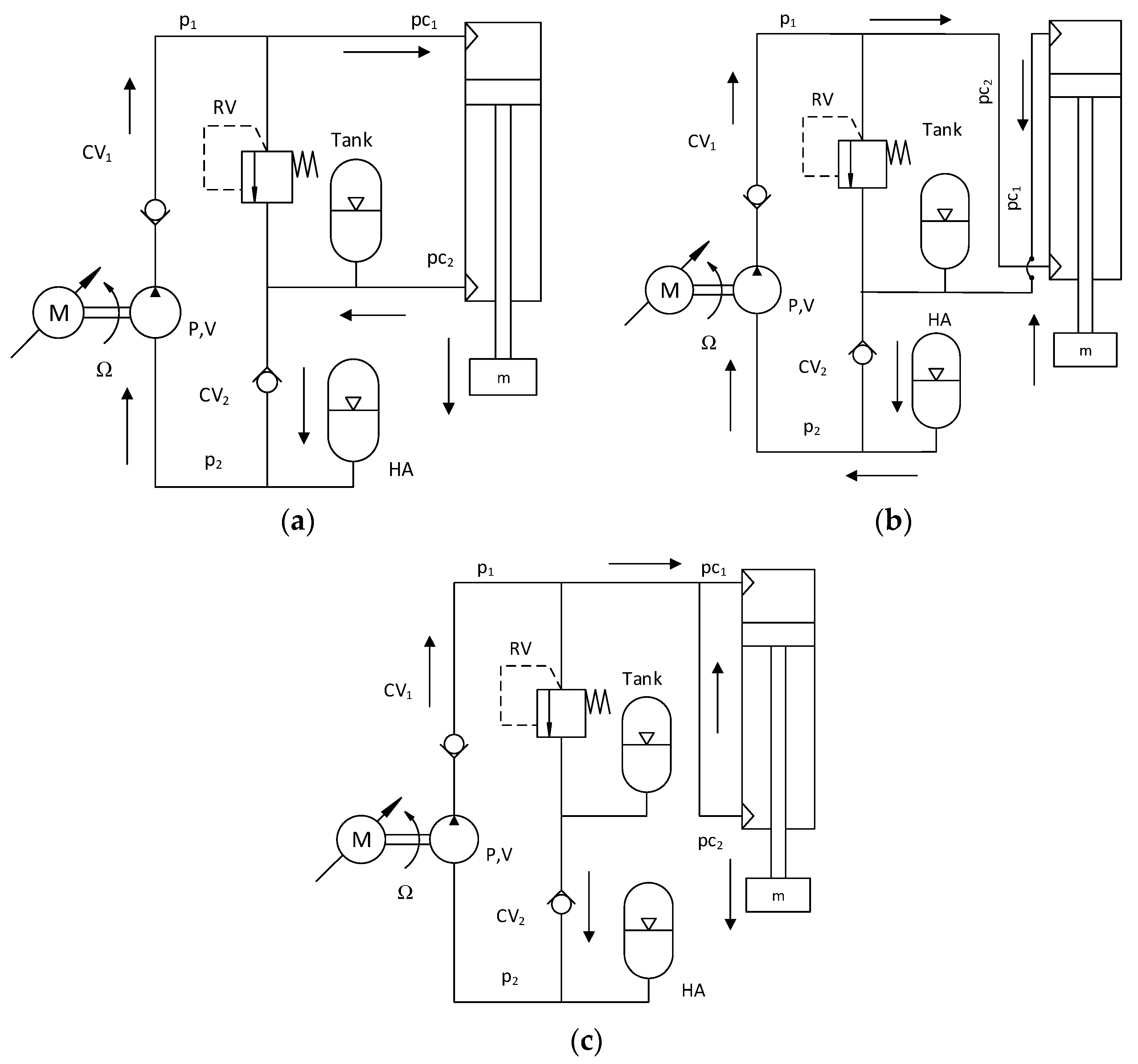
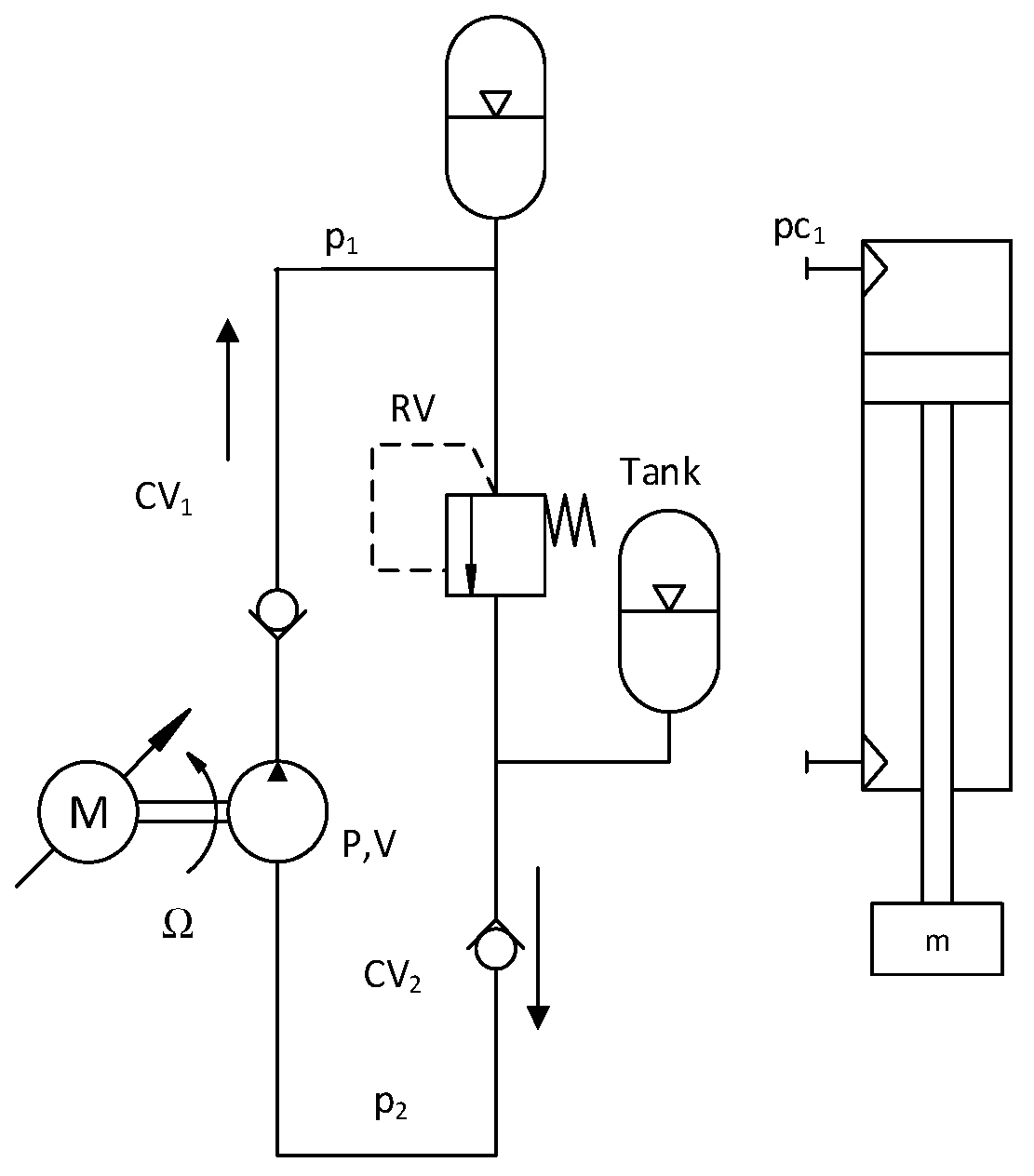
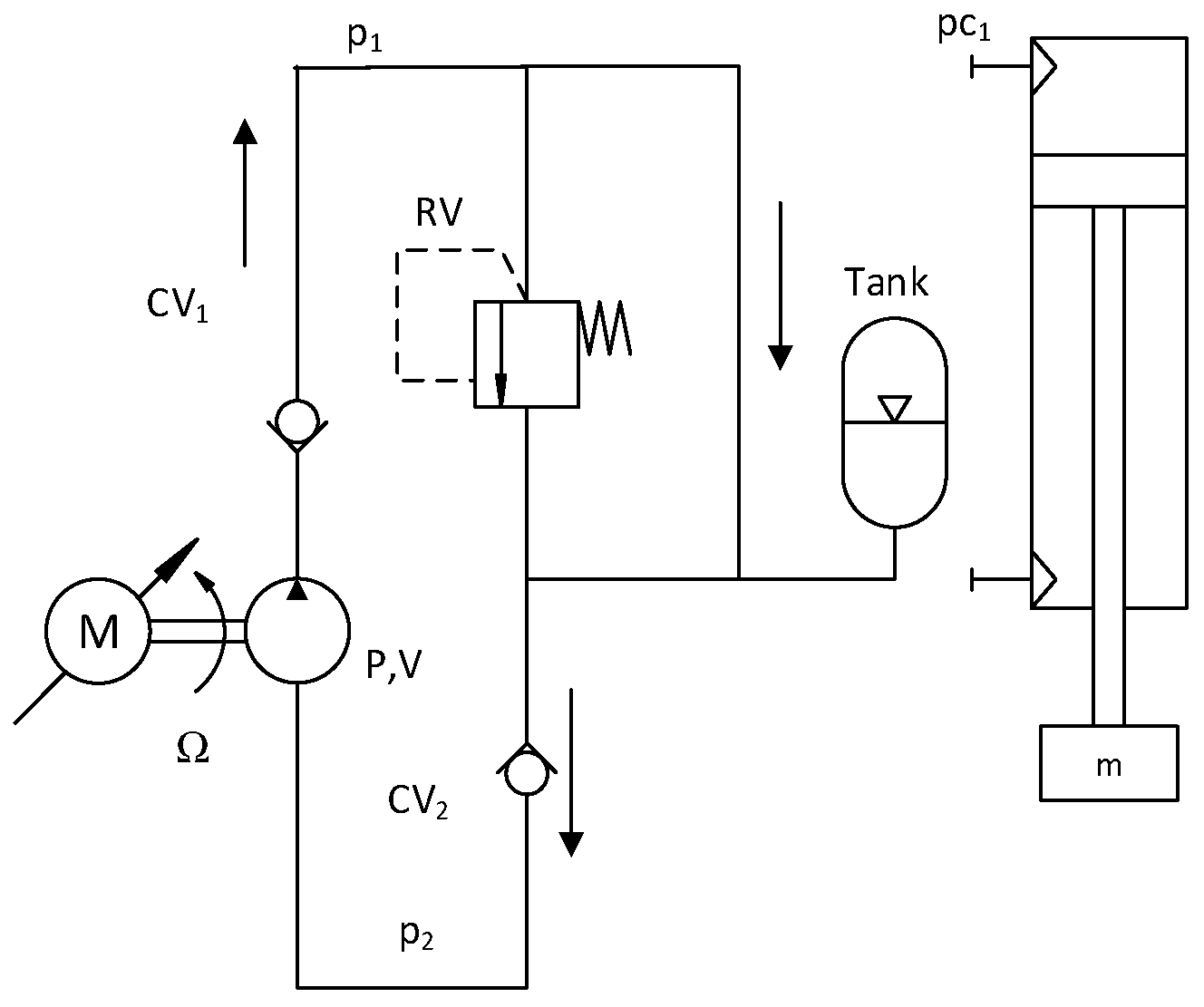
2.1. Hydraulic Circuit
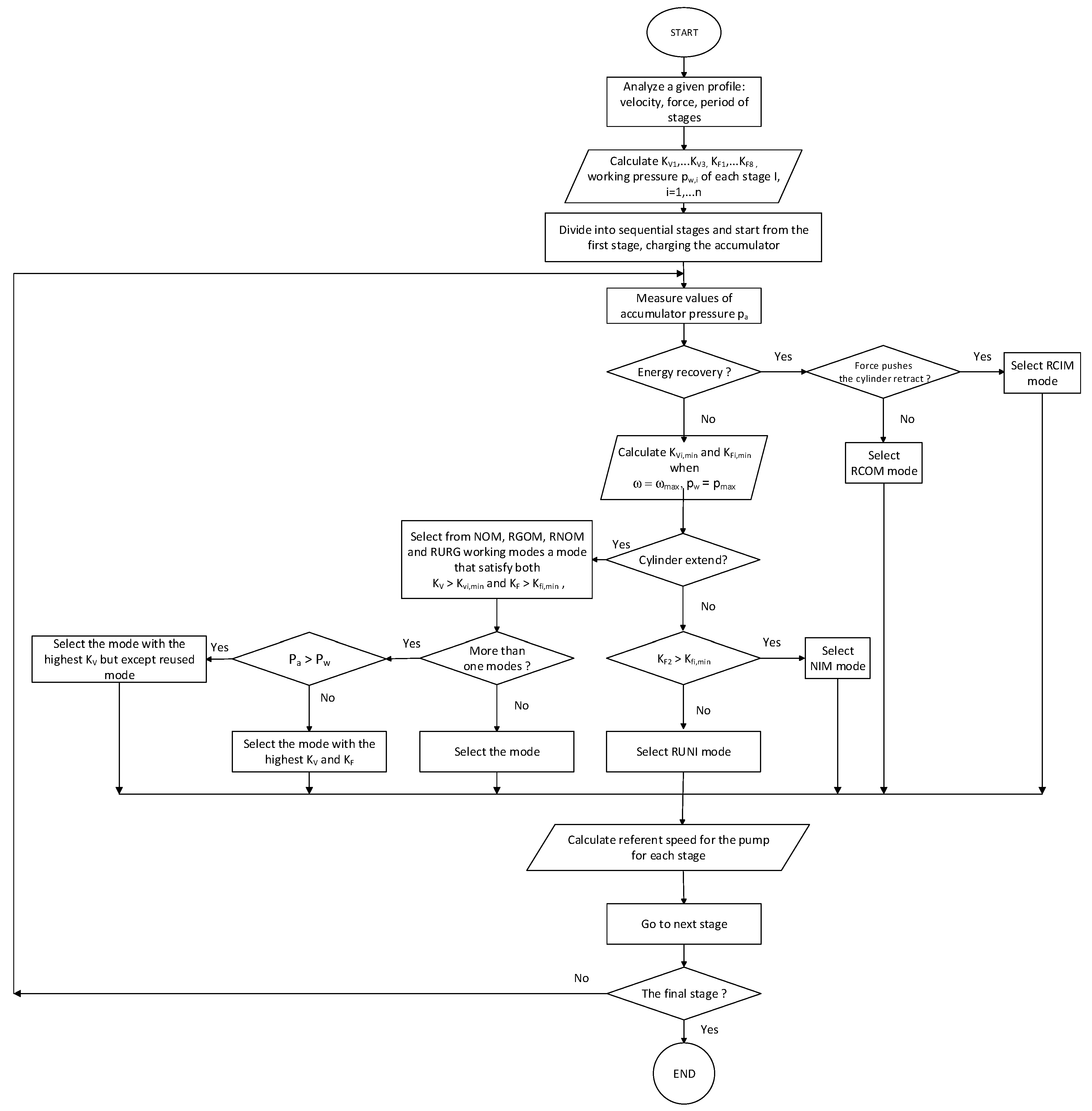
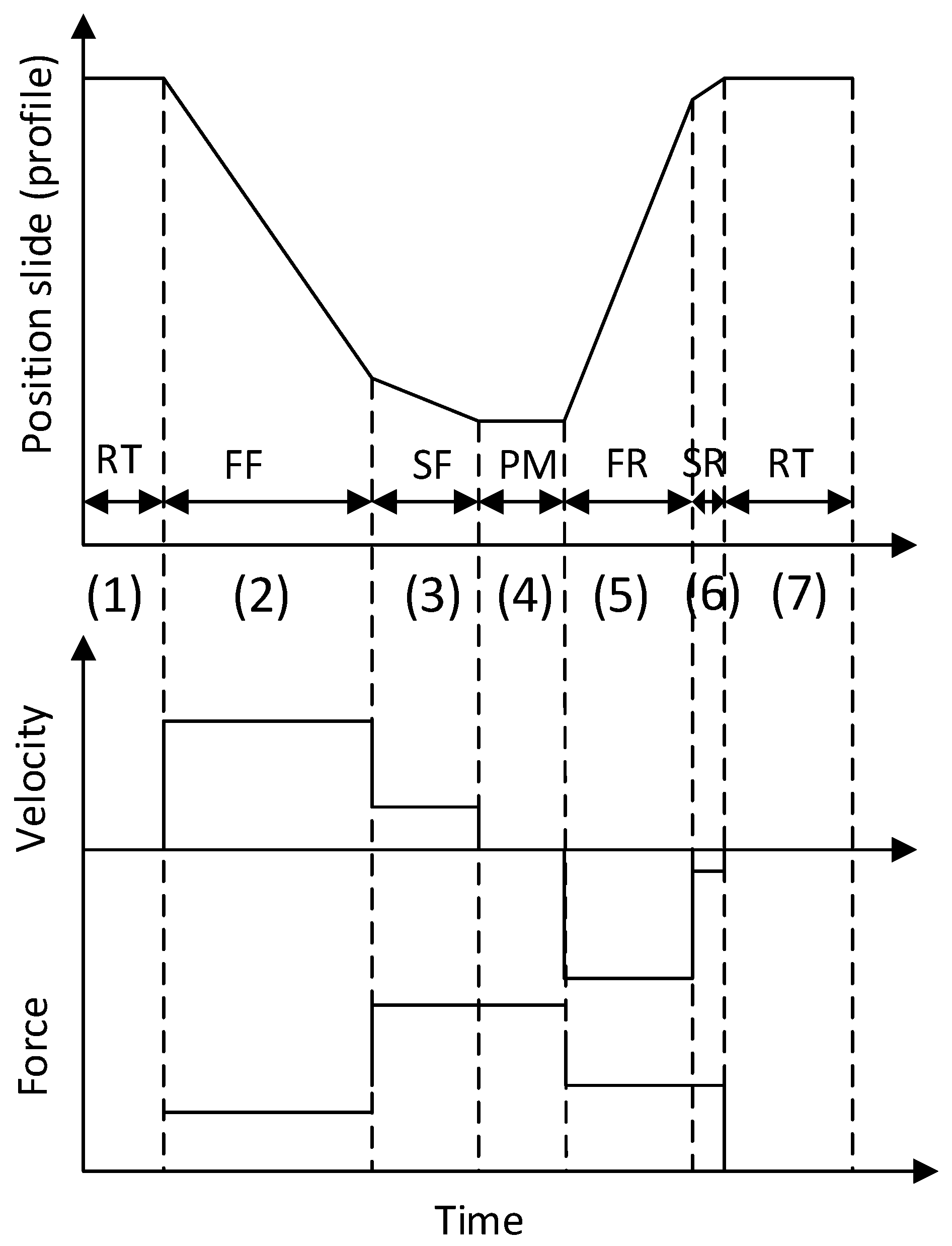
2.2. Control Strategy
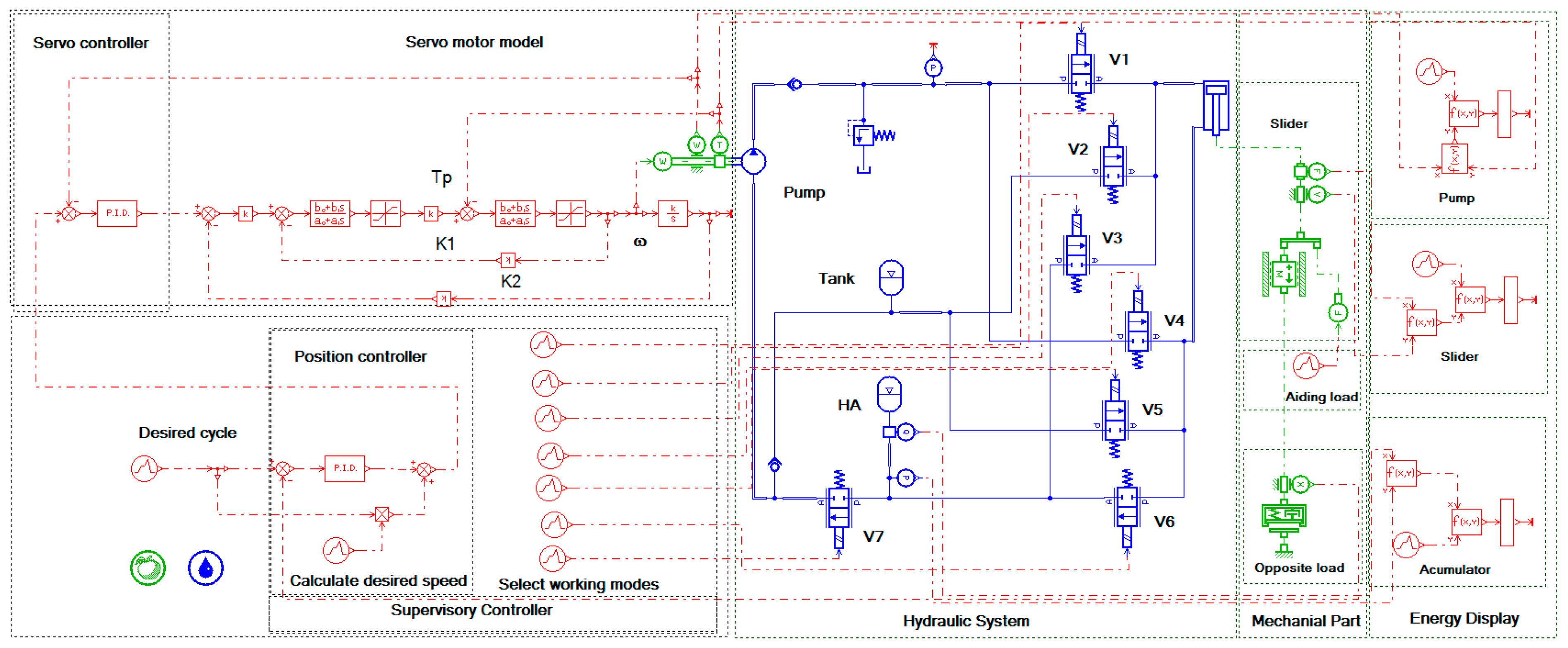
3. Modeling of the System in AMESim Software
3.1. Hydraulic Pump
3.2. Hydraulic Accumulator
3.3. Hydraulic Cylinder and Slider
3.4. Hydraulic Valves
3.5. Hydraulic Pipes
3.6. Energy Model
3.7. AC Servo Motor and Servo Controller Models
4. Simulation Results
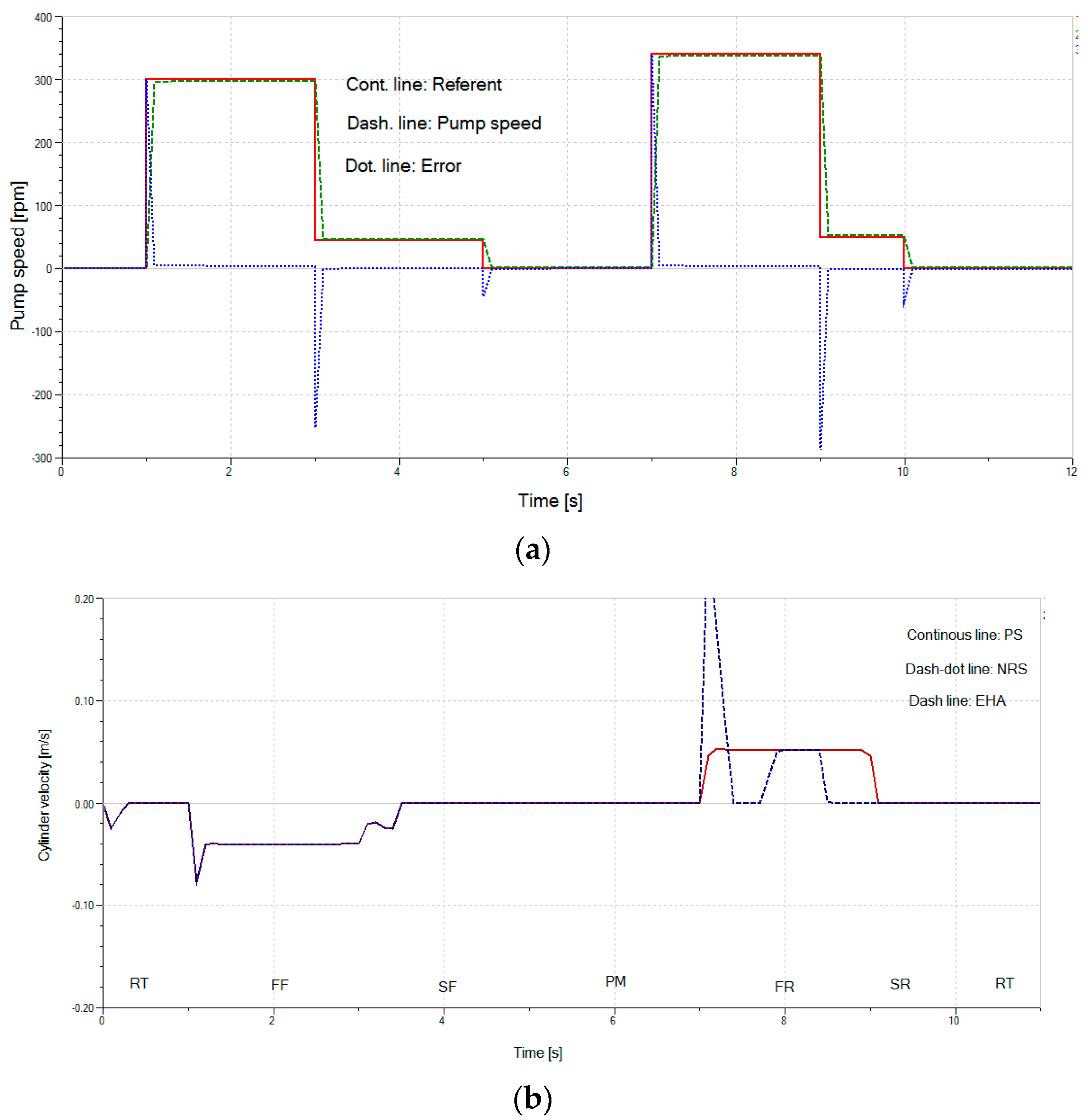
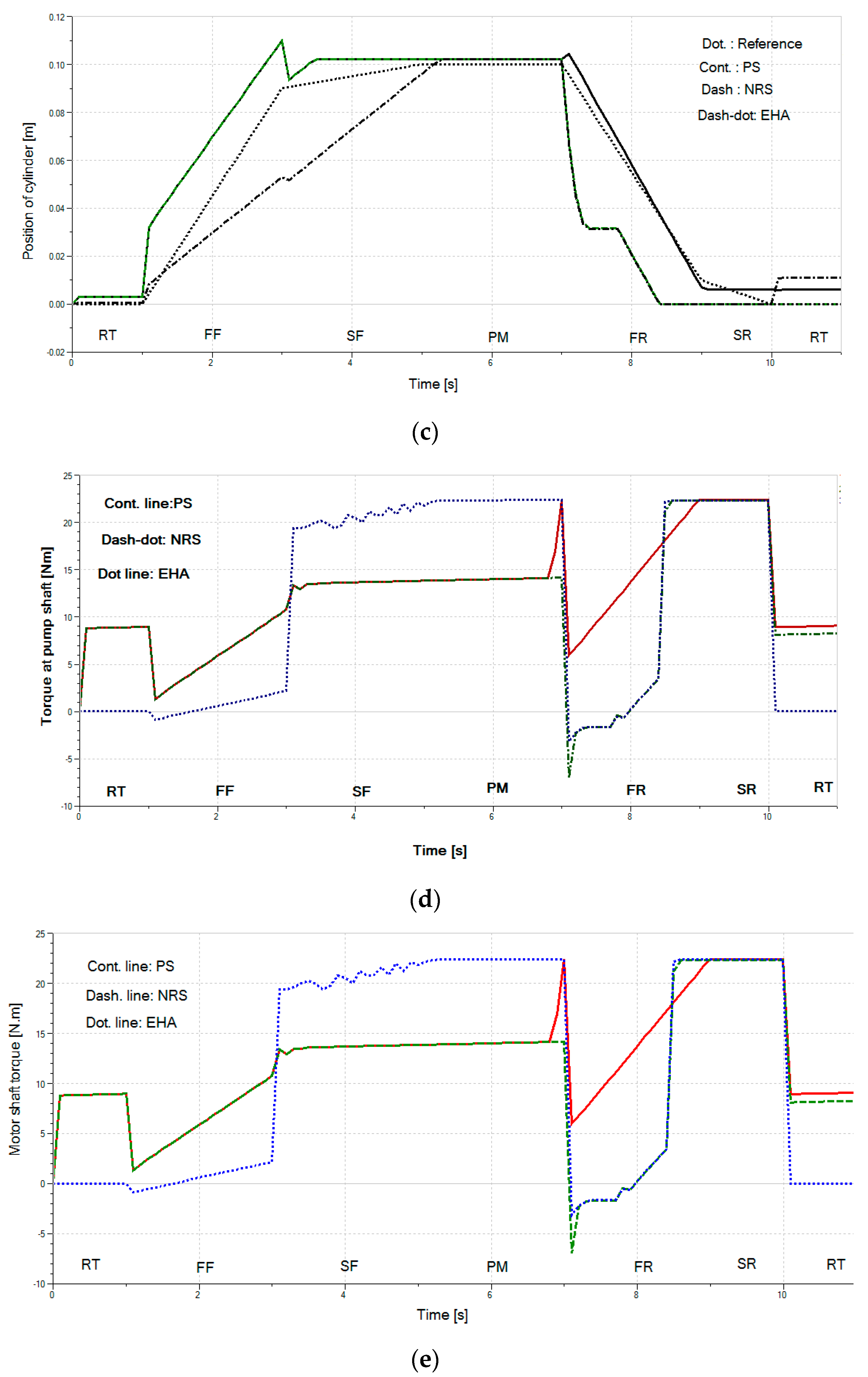
4.1. Open Response
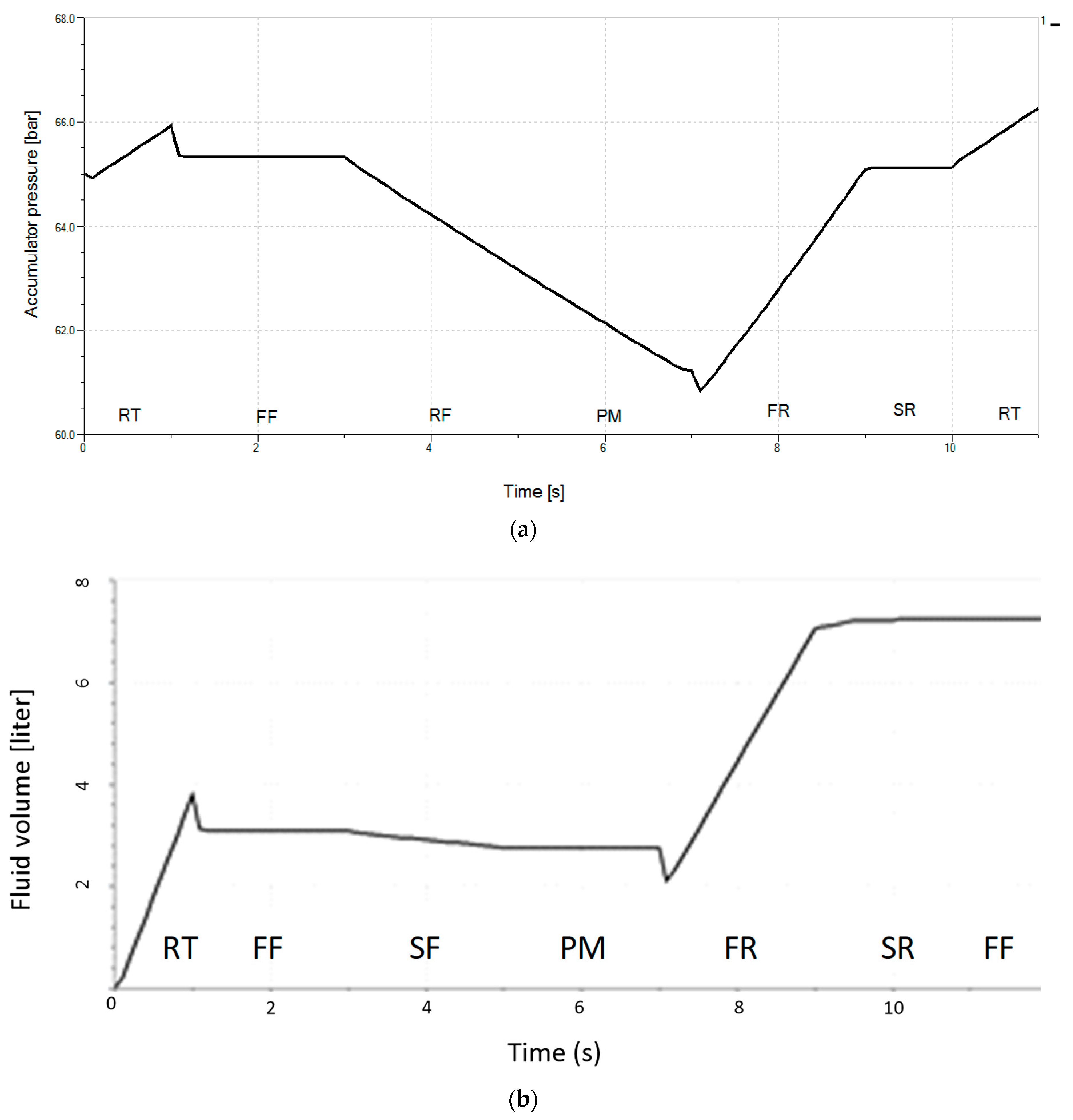
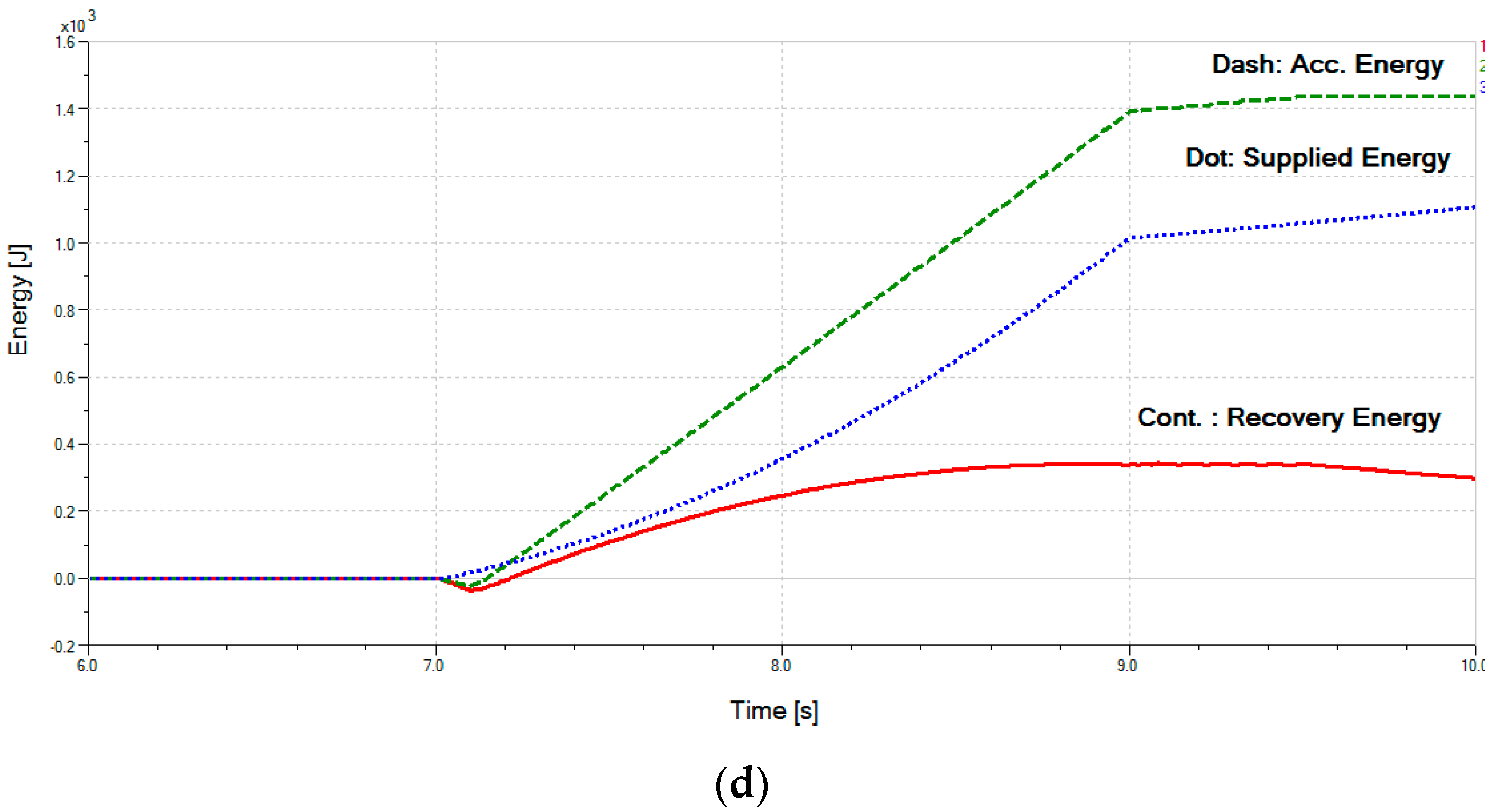
4.2. Energy Recovery Ability of the System for PS Strategy
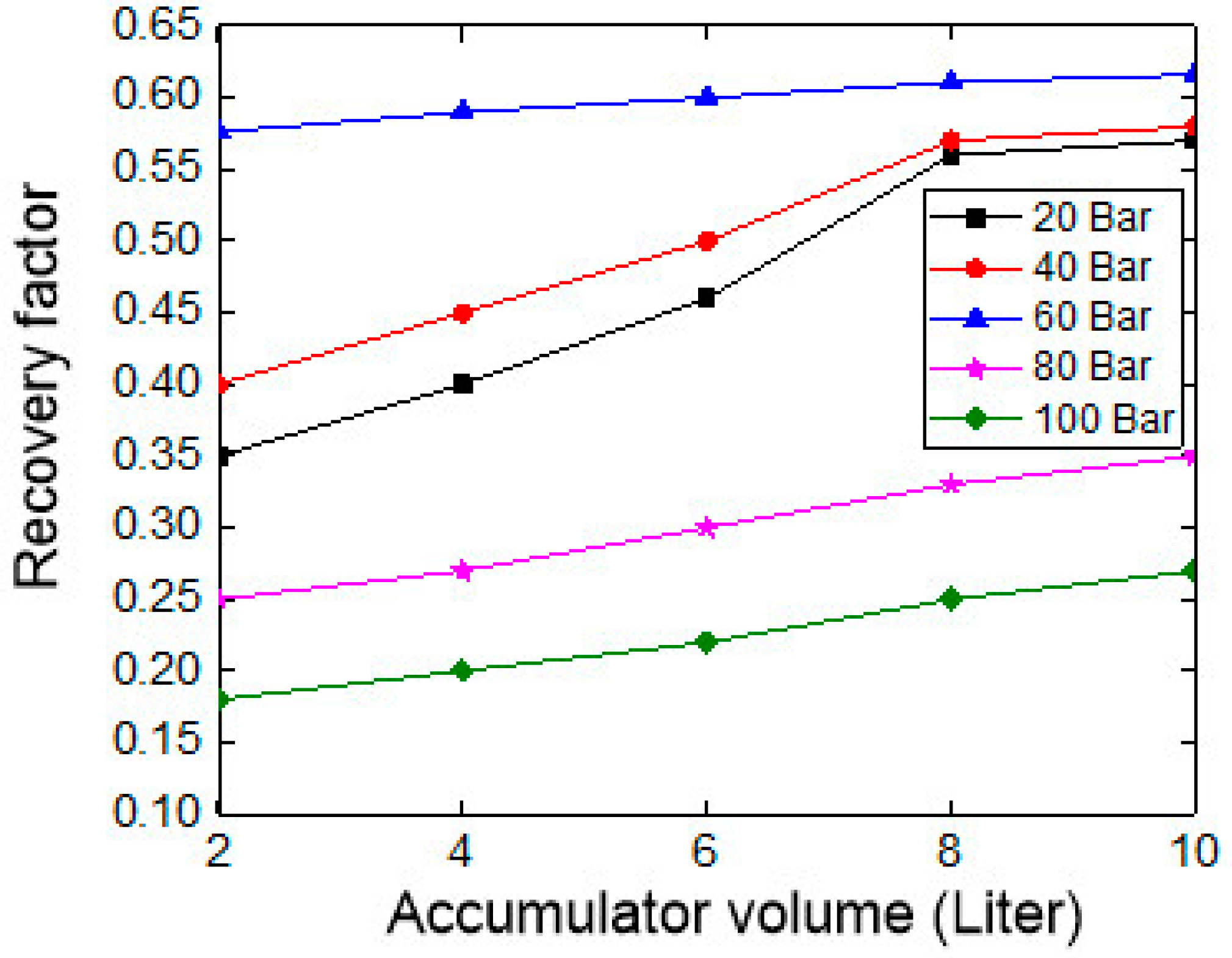
4.3. Effect of the Accumulator Parameters on Energy Recovery Potential of the System
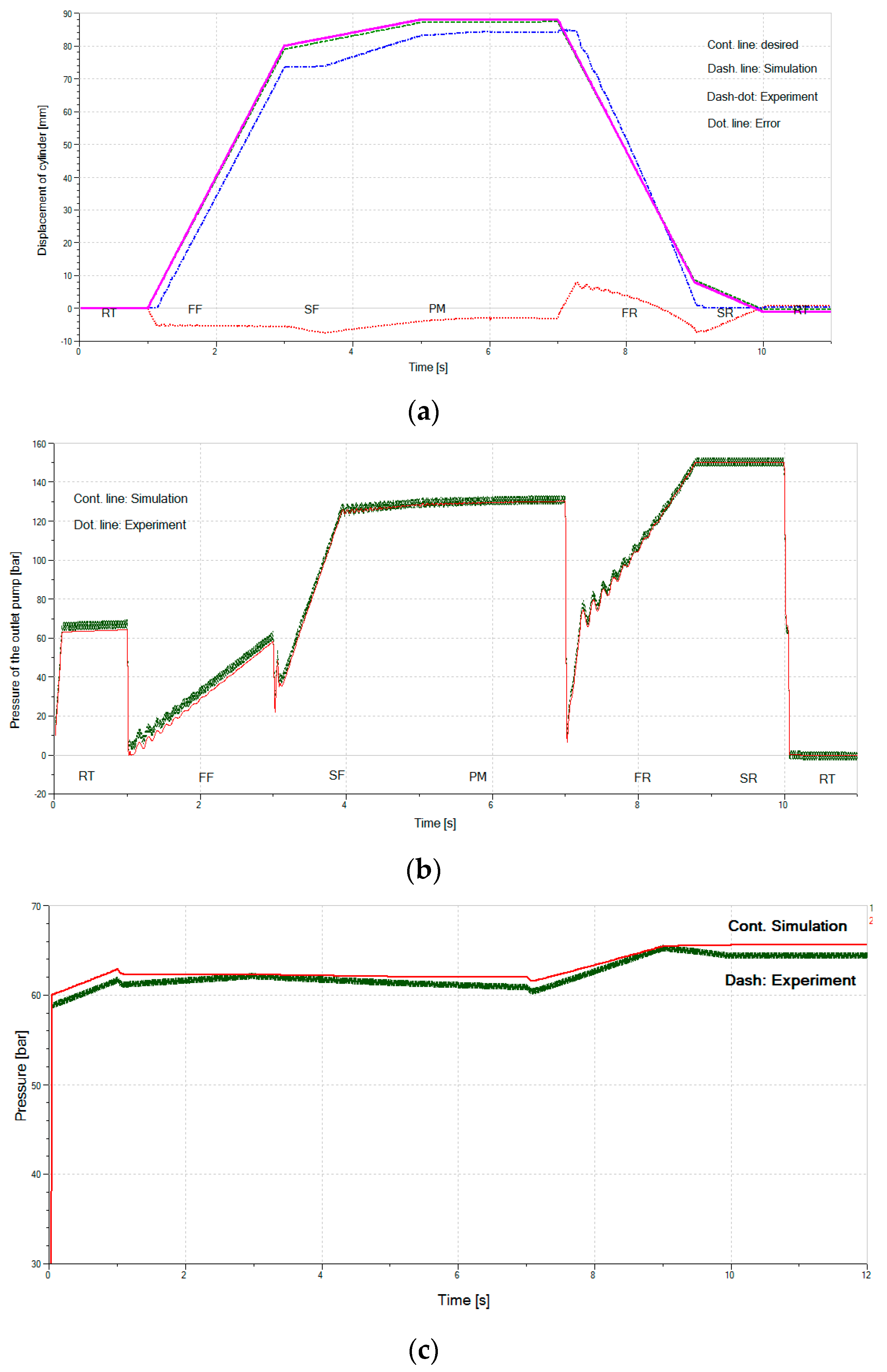
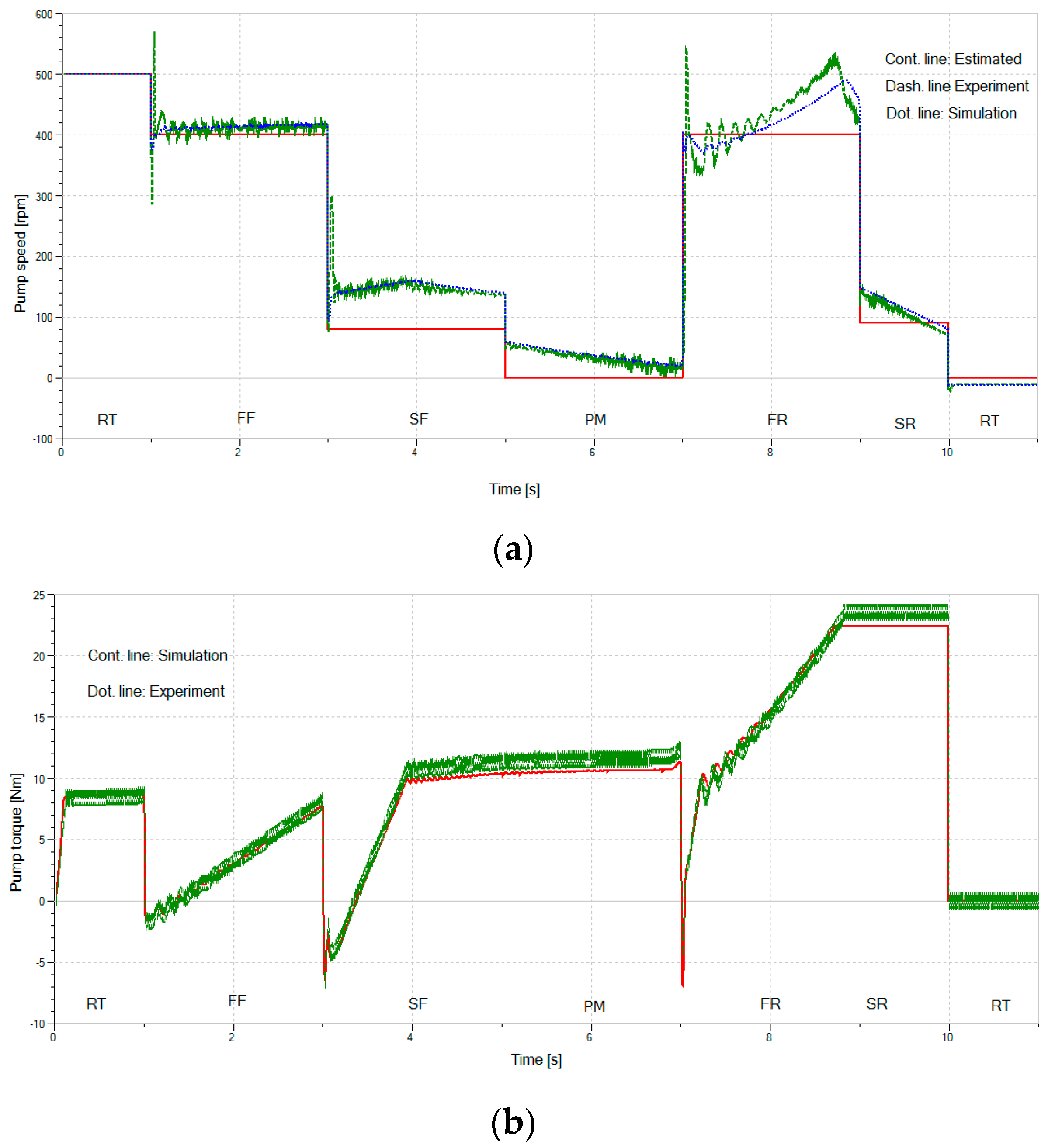
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Manring, N.D.; Fales, R.C. Hydraulic Control System, 2nd ed.; Wiley: Hoboken, NJ, USA, 2020. [Google Scholar]
- Zhao, K.; Liu, Z.; Yu, S.; Li, X.; Huang, H.; Li, B. Analytical energy dissipation in large and medium-sized hydraulic press. J. Clean. Prod. 2015, 103, 908–915. [Google Scholar] [CrossRef]
- Gao, M.; He, K.; Li, L.; Wang, Q. A Review on Energy Consumption, Energy Efficiency and Energy Saving of Metal Forming Processes from Different Hierarchies. Processes 2019, 7, 357. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wang, Y.; Huang, H.; Li, X.; Li, L.; Zhou, D. An Energy Matching Method for Hydraulic Press Group Based on Operation Load Profile. Procedia CIRP 2016, 48, 219–223. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Huang, H.; Zhao, F.; Sutherland, J.W.; Liu, Z. An Energy-Saving Method by Balancing the Load of Operations for Hydraulic Press. IEEE/ASME Trans. Mechatron. 2017, 22, 2673–2683. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, H.; Zhao, F.; Li, L.; Liu, Z. An Improved Energy-Saving Design Method for Drive System with Multi Motor-Pumps by Using Genetic Algorithm. Procedia CIRP 2019, 80, 79–83. [Google Scholar]
- Song, W.; Liu, S.; Pan, H.; Zhu, S. Investigation on the design of hydraulic high-speed punching press with a large press force and a long press stroke. Adv. Mech. Eng. 2016, 8, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Lu, B.; Zhang, C.; Sadatomi, M. Optimal Design of Hydraulic System for an Industrial Press Machine for Performance Improvement and Noise Reduction. Open J. Mech. Eng. 2013, 1, 1–16. [Google Scholar]
- Vacca, A.; Franzoni, G. Hydraulic Fluid Power; Wiley: Hoboken, NJ, USA, 2021; pp. 379–413. [Google Scholar]
- Ligang, H.; Yu, T.; Jio, Z.; Li, Y. Active Load-Sensitive Electro-Hydrostatic Actuator for More Electric Aircraft. Appl. Sci. 2020, 10, 6978. [Google Scholar]
- Casoli, P.; Scolari, P.; Minav, T.; Rundo, M. Comparative Energy Analysis of a Load Sensing System and a Zonal Hydraulics for a 9-Tonne Excavator. Actuators 2020, 9, 39. [Google Scholar] [CrossRef]
- Lovrec, D.; Kastrevc, M.; Ulaga, M. Ectro hydraulic load sensing with a speed controlled hydraulic supply system on forming machines. Int. J. Adv. Manuf. Technol. 2008, 41, 1066–1075. [Google Scholar] [CrossRef]
- Huova, M.; Aalto, A.; Linjama, M.; Huhtala, K. Study of Energy Losses in Digital Hydraulic Multi-Pressure Actuator. In Proceedings of the 15th Scandinavian International Conference on Fluid Power, SICFP’17, Linköping, Sweden, 7–9 June 2017; pp. 214–223. [Google Scholar]
- Heybroek, K.; Sahlman, M. A hydraulic hybrid excavator based on multi-chamber cylinders and secondary control—Design and experimental validation. Int. J. Fluid Power 2018, 19, 91–105. [Google Scholar] [CrossRef]
- Kalaiarassan, G.; Krishnamurthy, K. Digital hydraulic single-link trajectory tracking control through flow-based control. Meas. Control 2019, 52, 775–787. [Google Scholar] [CrossRef]
- Sell, P.N.; Johnston, D.N.; Plummer, A.R.; Kudzma, S. Control of a fast switching valve for digital hydraulics. In Proceedings of the 13th Scandinavian International Conference on Fluid Power, SICFP2013, Linköping, Sweden, 3–5 June 2013; pp. 497–503. [Google Scholar]
- Pourmovahed, A.; Beachey, N.; Fronczak, F. Modeling of a Hydraulic Energy Regeneration System—Part I: Analytical Treatment. ASME 1992, 114, 155–159. [Google Scholar]
- Kim, C.S.; Lee, C.O. Speed control of an overcenetered variable displacement hydraulic motor with a load torque observer. Control. Eng. Pract. 1996, 4, 1563–1570. [Google Scholar] [CrossRef]
- Guo, M.; Wang, L.; Jia, Z.; Liang, J. Wang Application of Hydraulic Transformer on Energy Saving for Boom System of Hybrid Hydraulic Excavator. Appl. Mech. Mater. 2017, 868, 118–123. [Google Scholar]
- Lee, S.; Li, Y.P. A Hardware-In-The-Loop (HIL) Testbed for Hydraulic Transformers Research. In Proceedings of the SICFP2017, Linköping, Sweden, 7–9 June 2017; pp. 179–185. [Google Scholar]
- Alle, N.; Hiremath, S.S.; Makaram, S.; Subramaniam, K.; Talukdar, A. Review on electro hydrostatic actuator for flight control. Intern. J. Fluid Power 2016, 17, 125–145. [Google Scholar]
- Du, C.; Plummer, A.R.; Johnston, D.N. Performance analysis of an energy-efficient variable supply pressure electro-hydraulic motion control system. Control. Eng. Pract. 2016, 48, 10–21. [Google Scholar] [CrossRef]
- Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve—Controlled Actuator—Part 1: Motion Control. Actuators 2019, 8, 79. [Google Scholar] [CrossRef] [Green Version]
- Sharghi, A.H.; Mohammadi, R.K.; Farrokh, M.; Zolfagharysaravi, S. Feed-Forward Controlling of Servo-Hydraulic Actuators Utilizing a Least-Squares Support—Vector Machine. Actuators 2020, 9, 11. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Book, W.J.; Huggins, J.D. Application of Singular Perturbation Theory to Hydraulic Pump Controlled Systems. IEEE/ASME Trans. Mechatron. 2012, 17, 251–259. [Google Scholar] [CrossRef]
- Lin, Y.; Shi, Y.; Burton, R. Modeling and Robust Discrete-Time Sliding-Mode Control Design for a Fluid Power Electrohydraulic Actuator (EHA) System. IEEE/ASME Trans. Mechatron. 2013, 18, 1–10. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Jaiswal, S.; Sopanen, J.; Mikkola, A. Efficiency comparison of various friction models of a hydraulic cylinder in the framework of multibody system dynamics. Nonlinear Dyn. 2021, 104, 3497–3515. [Google Scholar] [CrossRef]
- Tran, X.B.; Yanada, H. Dynamic Friction Behaviors of Pneumatic Cylinders. Intell. Control Autom. 2013, 4, 180–190. [Google Scholar] [CrossRef] [Green Version]
- Dulger, C.L.; Kirecci, A. Motion Control and Implementation for an AC Servomotor System. Model. Simul. Eng. 2007, 2007, 50586. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Li, Y.; Chen, W.; Du, R.; Chen, Q. Characteristic Modeling and Control of Servo Systems with Backlash and Friction. Math. Probl. Eng. 2014, 2014, 328450. [Google Scholar] [CrossRef]
- Sheng, H.W.; Wei, L.C.; Lo, H.P.; Shiuh, Y.S. Precision Control and Compensation of Servomotors and Machine Tools via the Disturbance Observer. IEEE Trans. Ind. Electron. 2009, 57, 420–431. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Defining Working Modes | Control Vales | ||||||
|---|---|---|---|---|---|---|---|---|
| V1 | V2 | V3 | V4 | V5 | V6 | V7 | ||
| 1 | Normal-out mode (NOM) | ON | OFF | OFF | OFF | ON | OFF | OFF |
| 2 | Normal-in mode (NIM) | OFF | ON | OFF | ON | OFF | OFF | OFF |
| 3 | Regenerative mode (RGOM) | ON | OFF | OFF | ON | OFF | OFF | OFF |
| 4 | Recovery-out mode (RCOM) | ON | OFF | OFF | OFF | OFF | ON | OFF |
| 5 | Recovery-in mode (RCIM) | OFF | OFF | ON | ON | OFF | OFF | OFF |
| 6 | Reused normal-out mode (RUNO) | ON | OFF | OFF | OFF | ON | OFF | ON |
| 7 | Reused normal-in mode (RUNI) | OFF | ON | OFF | ON | OFF | OFF | ON |
| 8 | Reused regenerative mode (RURG) | ON | OFF | OFF | ON | OFF | OFF | ON |
| 9 | Charging accumulator mode (CAM) | ON | OFF | ON | OFF | OFF | OFF | OFF |
| 10 | Unloading pump mode (ULM) | ON | ON | OFF | OFF | OFF | OFF | OFF |
| No | Working Modes | Characteristics | Factors | |
|---|---|---|---|---|
| KV | KF | |||
| 1 | NOM | High force Low speed | ||
| 2 | NIM | Low force High speed | ||
| 3 | RGOM | Low force High speed | ||
| 4 | RCOM | Energy recovery in extend direction | KV1 | −KF1 |
| 5 | RCIM | Energy recovery in retract direction | KV2 | −KF2 |
| 6 | RUNO | The highest force Low speed | KV1 | |
| 7 | RUNI | High force High speed | KV2 | |
| 8 | RURG | High force High speed | KV3 | |
| 9 | CAM | Sharing power | 0 | 0 |
| 10 | ULM | Unloading system | 0 | 0 |
| Requirement of Factors | Phase in the Pressing Cycle | ||||||
|---|---|---|---|---|---|---|---|
| RT | FF | SF | PR | FR | SR | RT | |
| Phase number | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Velocity factor KV,min | NO | HIGH | LOW | LOW | HIGH | LOW | NO |
| Force factor KF,min | NO | LOW | HIGH | HIGH | LOW | LOW | NO |
| Order | Pressing Phases | PS | NRS | EHA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| KV | KF | Working Modes | KV | KF | Working Modes | KV | KF | Working Modes | ||
| 1 | RT | 0 | 0 | CAM | 0 | 0 | CAM | 0 | 0 | ULM |
| 2 | FF | KV3 | KF3 | RGOM | KV3 | KF3 | RGOM | KV1 | KF1 | NOM |
| 3 | SF | KV1 | KF6 | RUNO | KV1 | KF6 | RUNO | KV1 | KF1 | NOM |
| 4 | PM | KV1 | KF6 | RUNO | KV1 | KF6 | RUNO | KV1 | KF1 | NOM |
| 5 | FR | KV2 | -KF2 | RCIM | KV2 | KF2 | NIM | KV2 | KF2 | NIM |
| 6 | SR | KV2 | -KF2 | RCIM | KV2 | KF2 | NIM | KV2 | KF2 | NIM |
| 7 | RT | 0 | 0 | ULM | 0 | 0 | ULM | 0 | 0 | ULM |
| No | Pressing Phase | Characteristics of the Three Control Strategies | ||
|---|---|---|---|---|
| PS | NRS | EHA | ||
| 1 | RT | No velocity, no force, low input power | No velocity, no force, low input power | No velocity, no force, no input power |
| 2 | FF | High velocity, low force | High velocity, low force | Low velocity, high force |
| 3 | SF | Low velocity, high force, low pump torque | Low velocity, high force, low pump torque | Low velocity, high force, high pump torque |
| 4 | PM | Low velocity, high force, low pump torque | Low velocity, high force, low pump torque | Low velocity, high force, high pump torque |
| 5 | FR | Energy recovery, high velocity, low force | No energy recovery, high velocity, low force | No energy recovery, high velocity, low force |
| 6 | SR | Energy recovery, high velocity, low force | No energy recovery, high velocity, low force | No energy recovery, high velocity, low force |
| 7 | RT | No velocity, no force, no input power | No velocity, no force, no input power | No velocity, no force, no input power |
| No | Equipment | Parameters | Values | Unit |
|---|---|---|---|---|
| 1 | Hydraulic pump | Displacement (V) | 1.6 × 10−6 | m3/rad |
| Volumetric efficiency in pump mode | as a function of speed end pressure | - | ||
| Mechanical efficiency in pump mode | ||||
| Volumetric efficiency in motor mode | as a function of speed end pressure | - | ||
| Mechanical efficiency in motor mode | ||||
| Moment of inertia | 0.012 | kg·m2 | ||
| 2 | Hydraulic valve | Nominal flow rate | 10−3 | m3/s |
| Sifting time | 20 | ms | ||
| 3 | Hydraulic cylinder | Bore diameter D | 6 × 10−2 | m |
| Rod diameter d | 4.5 × 10−3 | m | ||
| Max Stroke | 0.3 | m | ||
| Dead volume at port 1 end | 5 × 10−5 | m3 | ||
| Dead volume at port 2 end | 5 × 10−5 | m3 | ||
| Leakage coefficient | 10−7 | m3/s/bar | ||
| 4 | Hydraulic accumulator | Pre-charge pressure | 60 × 105 | Pa |
| Volume | 6 × 10−3 | m3 | ||
| 5 | Slider | Mass | 100 | kg |
| External load | 30 | kN | ||
| Viscous friction coefficient | 0.1 | N/(m/s) | ||
| Coulomb force | 250 | N | ||
| Stiction force | 800 | N | ||
| 6 | Spring | Stiffness | 12 × 104 | N/m |
| 7 | Pipe | Diameter | 12.8 × 10−3 | m |
| Bulk modulus | 8 × 109 | Pa | ||
| Length | 0.5–1.5 | m | ||
| 8 | Relief valve | Setting pressure | 15 | MPa |
| Pressing Phases | RT | FF | SF | PM | FR | SR | RT |
|---|---|---|---|---|---|---|---|
| Phase numbers | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Period (second) | 1 | 2 | 2 | 2 | 2 | 1 | 1 |
| External force (kN) | 0 | 0 | 30 | 30 | 0 | 0 | 0 |
| Speed of the pump (rpm) | |||||||
| PS strategy | 500 | 400 | 80 | 0 | 400 | 90 | 0 |
| NRS | 500 | 400 | 80 | 0 | 400 | 90 | 0 |
| EHA | 500 | 800 | 160 | 0 | 400 | 90 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ho, T.H.; Le, T.D. Development and Evaluation of Energy-Saving Electro-Hydraulic Actuator. Actuators 2021, 10, 302. https://doi.org/10.3390/act10110302
Ho TH, Le TD. Development and Evaluation of Energy-Saving Electro-Hydraulic Actuator. Actuators. 2021; 10(11):302. https://doi.org/10.3390/act10110302
Chicago/Turabian StyleHo, Triet Hung, and Thanh Danh Le. 2021. "Development and Evaluation of Energy-Saving Electro-Hydraulic Actuator" Actuators 10, no. 11: 302. https://doi.org/10.3390/act10110302
APA StyleHo, T. H., & Le, T. D. (2021). Development and Evaluation of Energy-Saving Electro-Hydraulic Actuator. Actuators, 10(11), 302. https://doi.org/10.3390/act10110302