
Evaluation of Dynamic Load Reduction for a Tractor Semi-Trailer Using the Air Suspension System at all Axles of the Semi-Trailer



Abstract
:1. Introduction
1.1. Background
1.2. Related Works
1.2.1. Air Suspension Model
Development of the Model of the Air Suspension System
Integrating the Model of the Air Suspension System in Vehicle Models
1.2.2. Dynamic Load
1.3. Paper Contributions
- −
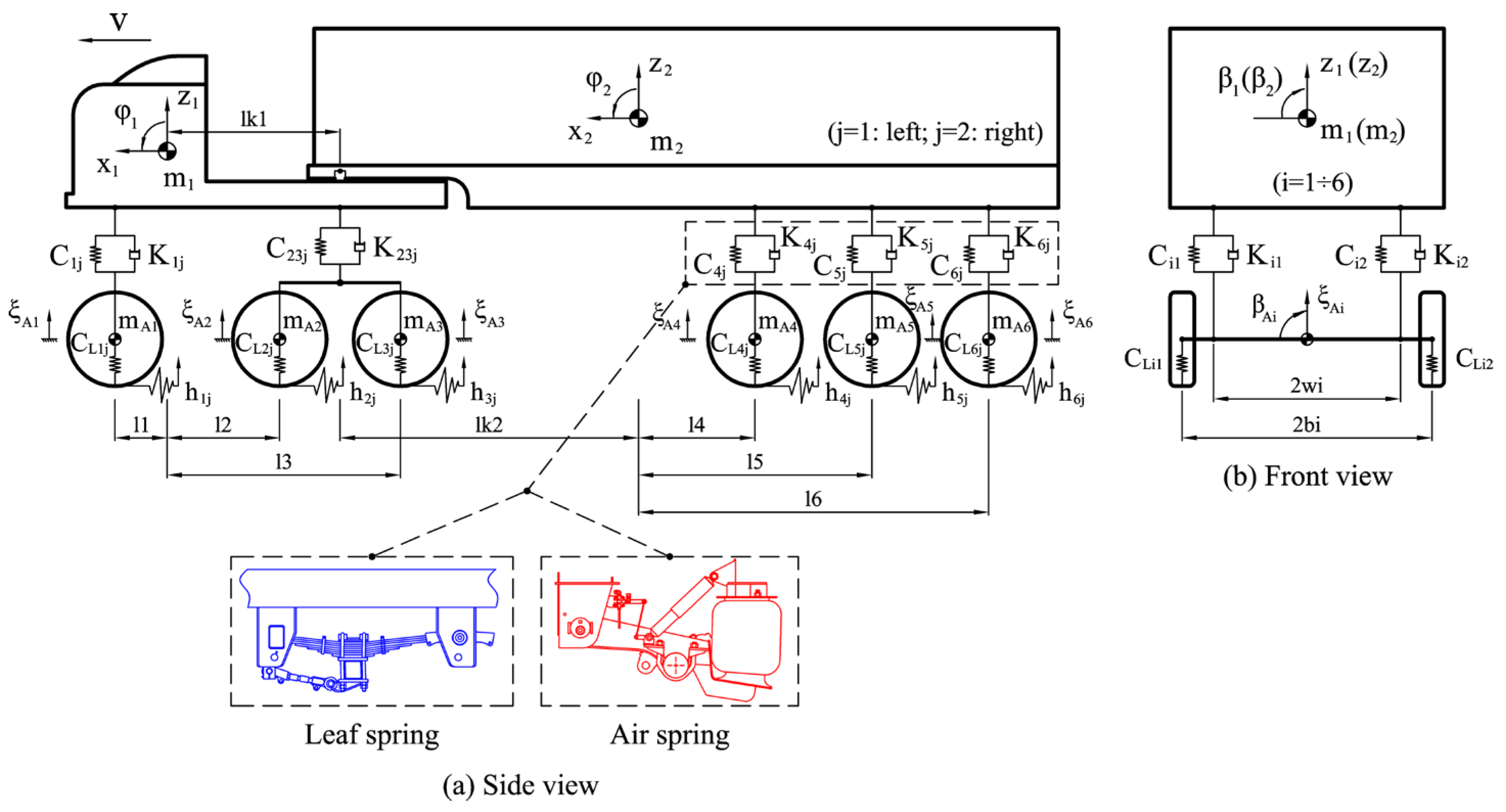
- Propose a full vertical dynamic model of a 6-axle tractor semi-trailer with 26 degrees of freedom for the leaf spring suspension systems and 28 degrees of freedom for the air suspension systems. Leaf suspension systems are used for the tractor and the air suspension system for the semi-trailer. These two suspension systems are presented as two sub-models, in which the air suspension system is based on the GENSYS model and integrated into the vehicle model.
- −
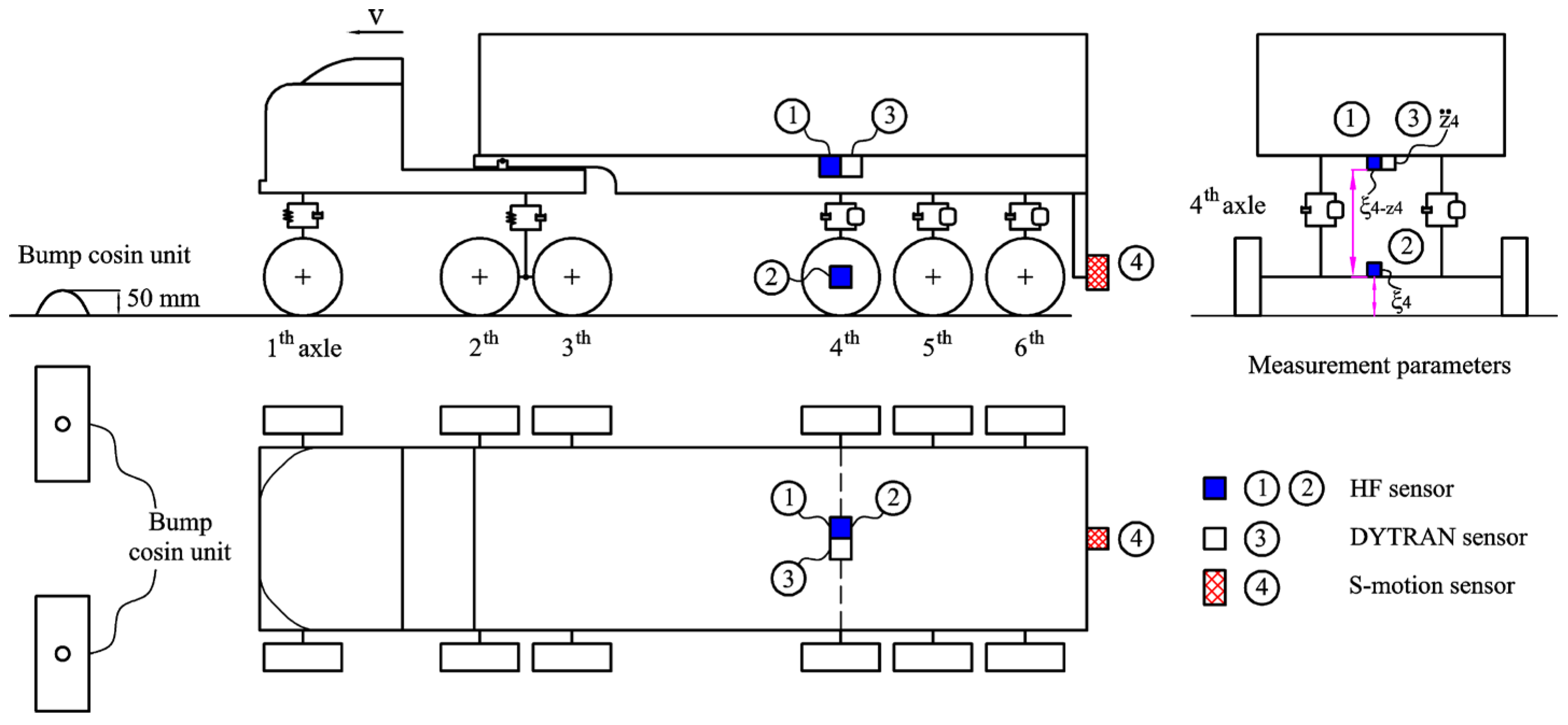
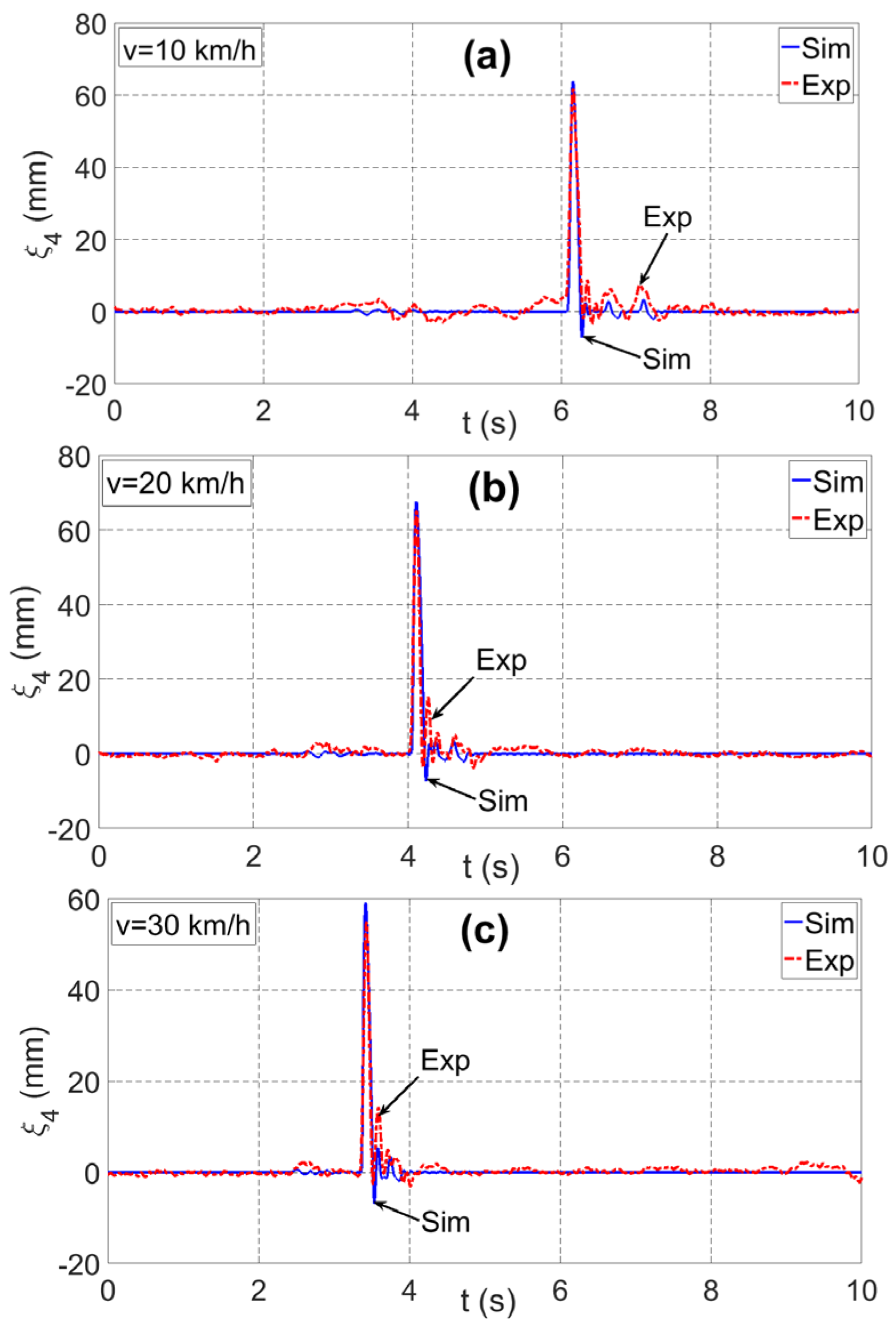
- Validate the full model through real experiments using measurement parameters, including: displacement of un-sprung mass at the 4th axle, relative displacement of sprung and un-sprung mass at the 4th axle (suspension space), acceleration of sprung mass at the 4th axle, and movement velocity of the vehicle. The validation results between the research model and the experiments at different velocities showed that the Pearson correlation coefficient is higher than 0.8, and the percent error of the highest value is smaller than 6.3%.
- −
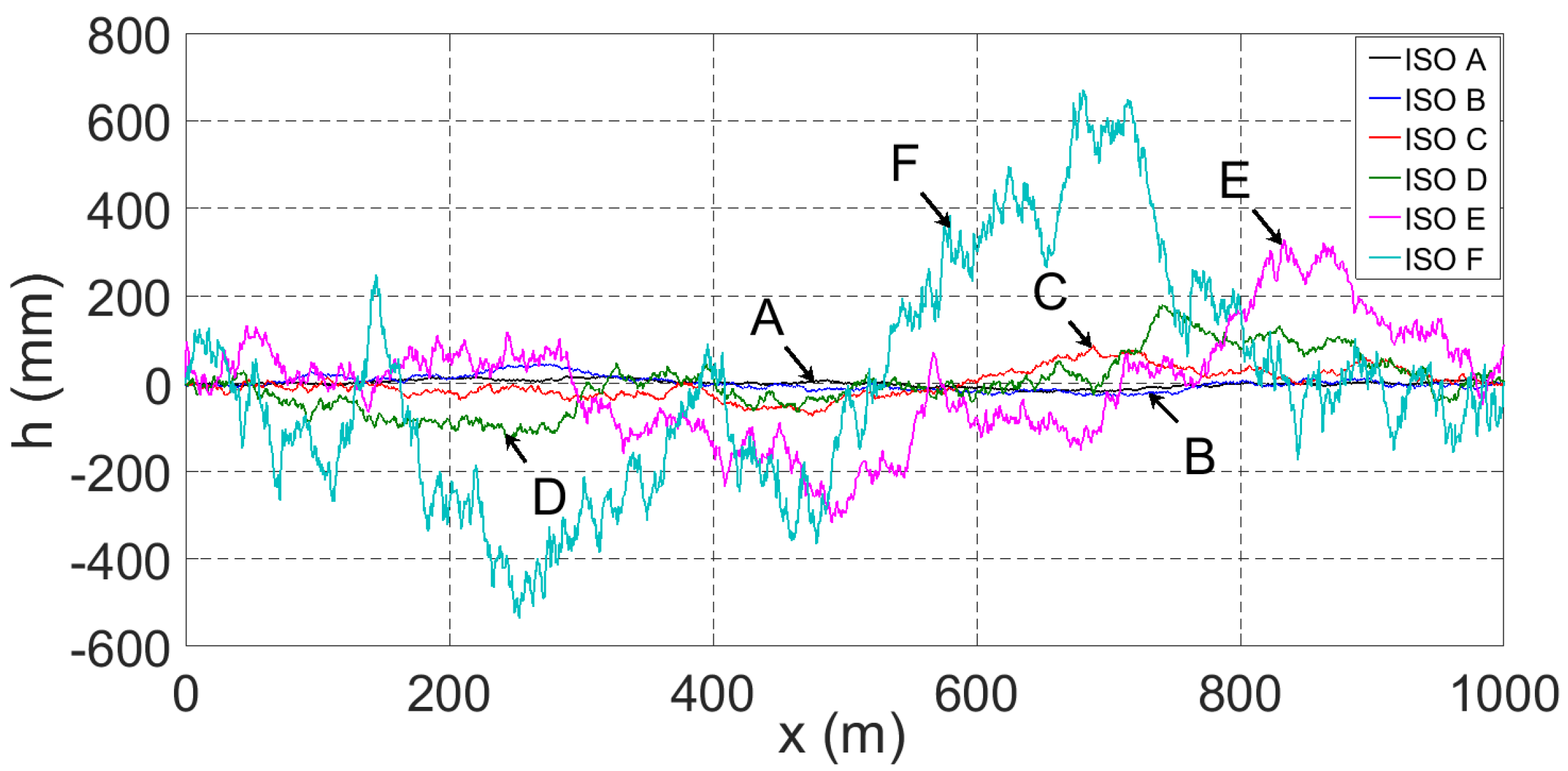
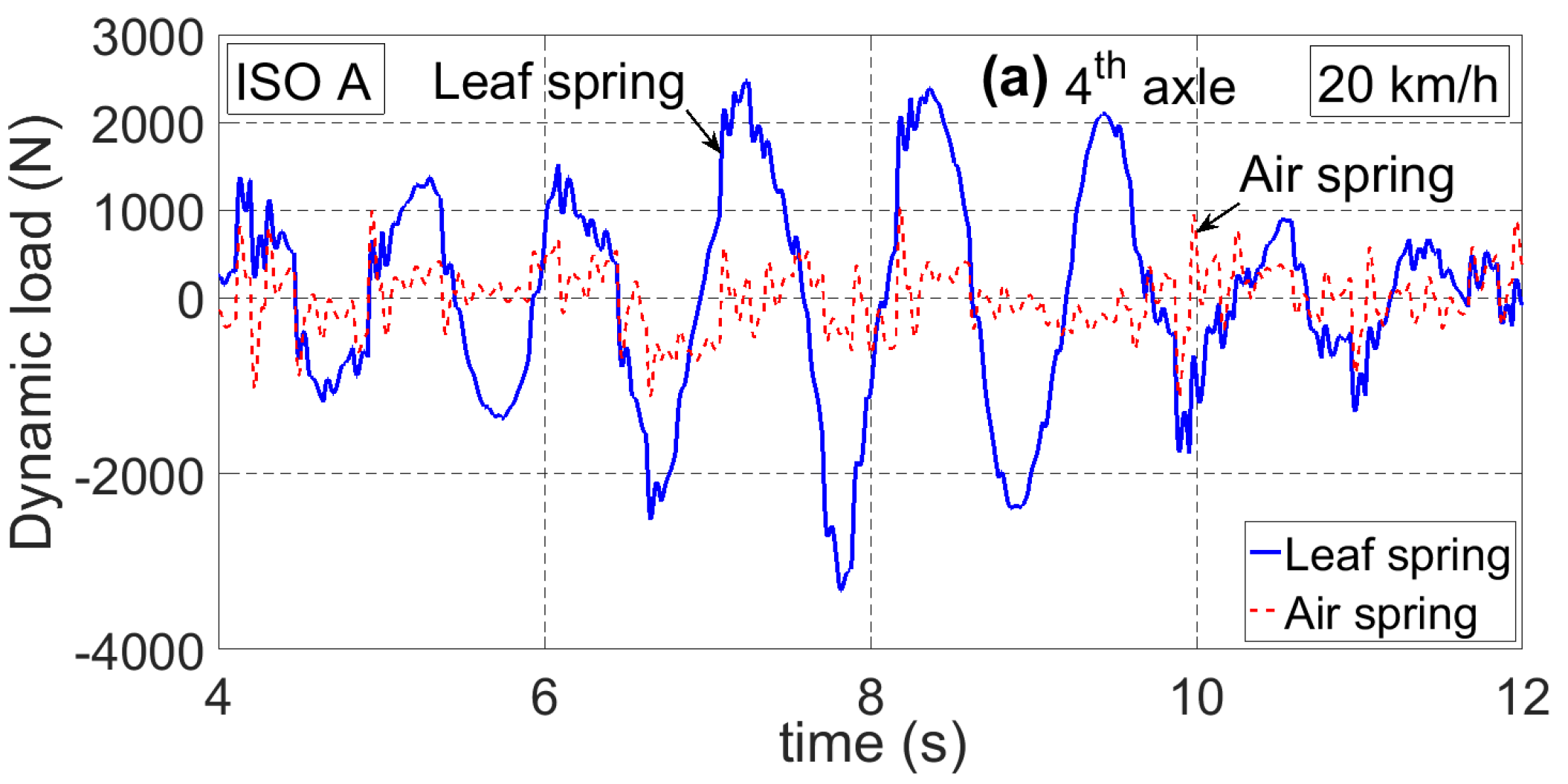
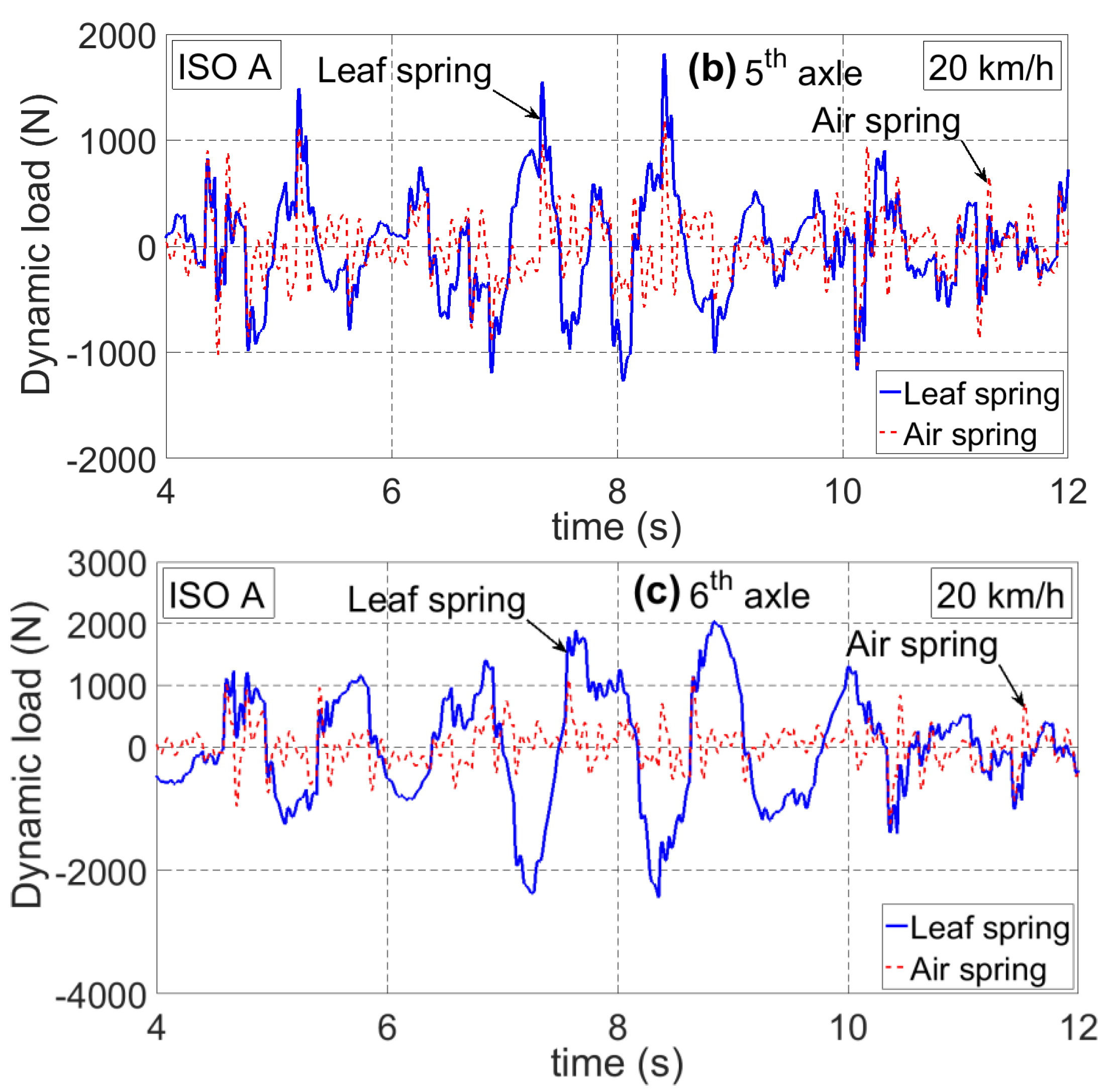
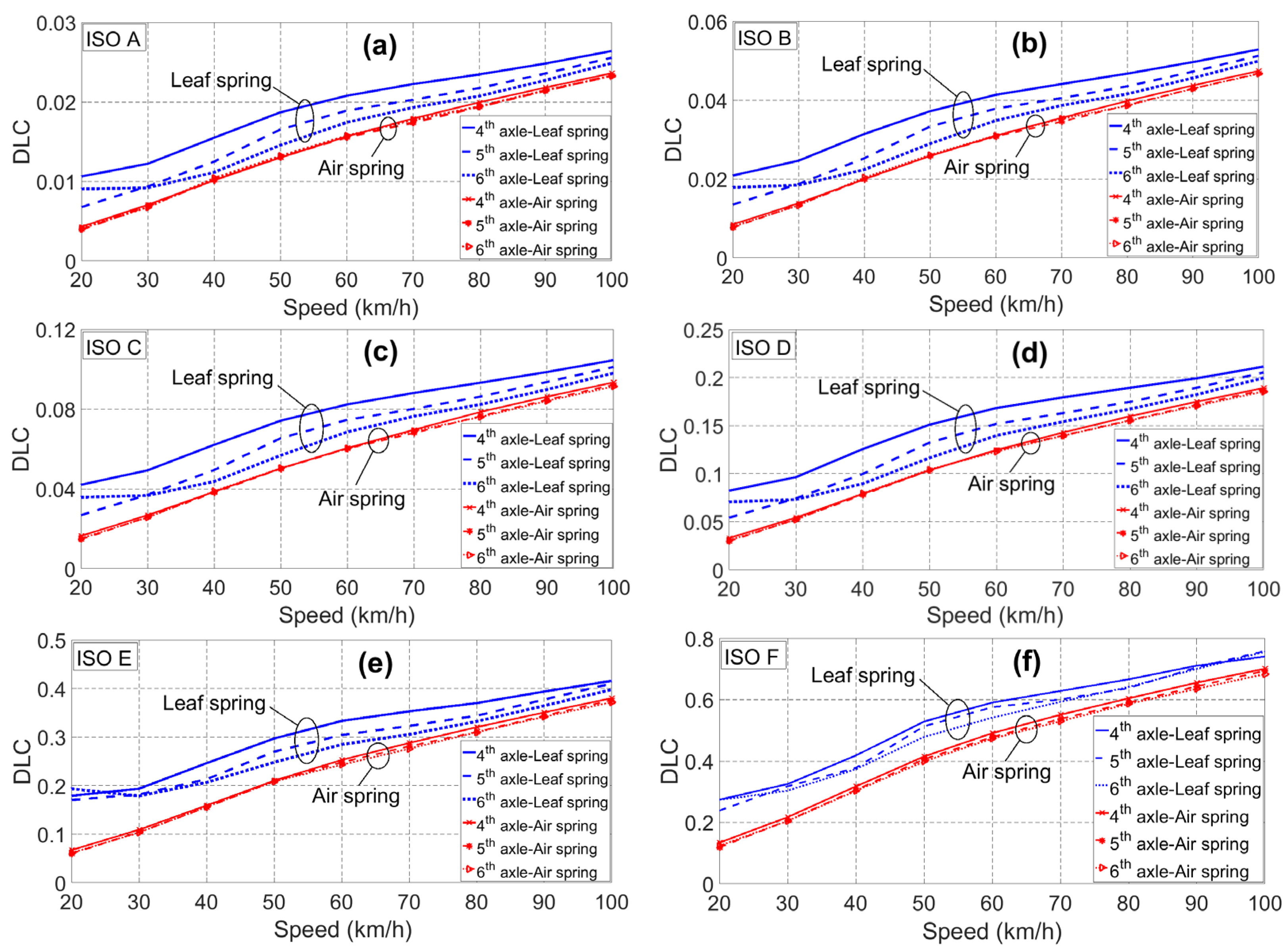
- Comparisons of the DLC on the 4th, 5th, and 6th axles of the semi-trailer with the two types of suspension system in diversified driving conditions, including: velocity range from 20 to 100 km/h and random types of roads according to ISO 8608:2016, ranging from road A to road F. Comparative results will show that the air suspension system could, on average, reduce dynamic load by up to 29.3% compared to the conventional semi-trailer using the leaf spring suspension systems.
2. Vehicle Modeling of a Tractor Semi-Trailer
2.1. Full Model of a Tractor Semi-Trailer
2.2. Suspension Models of Semi-Trailer
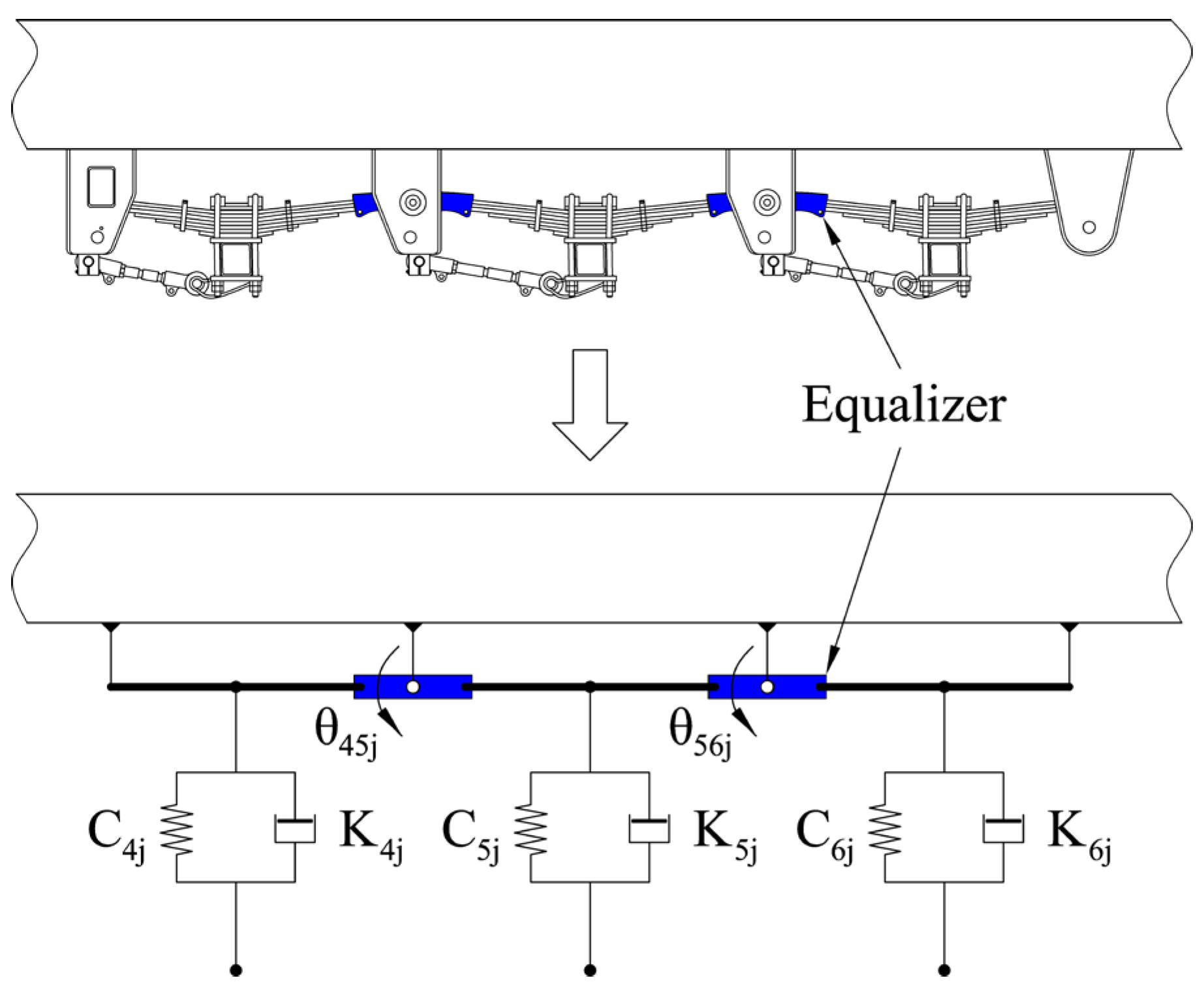
2.2.1. Leaf Spring Model
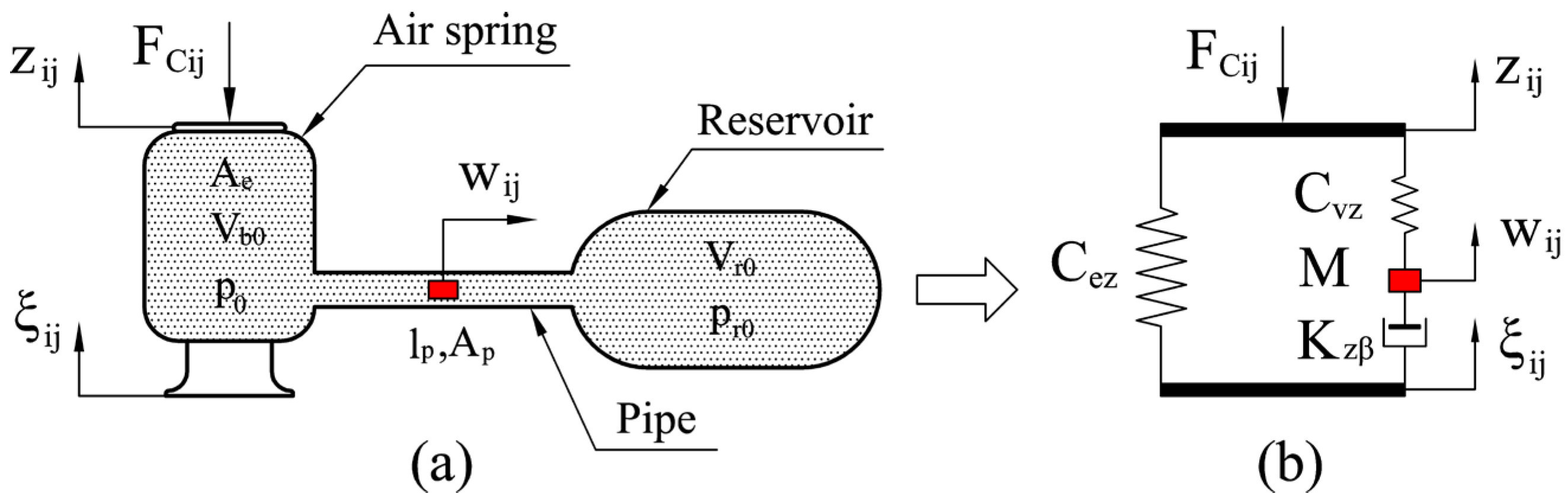
2.2.2. Air Suspension Model
2.3. Random Road Profile
3. Evaluation Criteria
4. Validation of the Tractor Semi-Trailer Model Using Real Experiments
4.1. Experimental Purpose
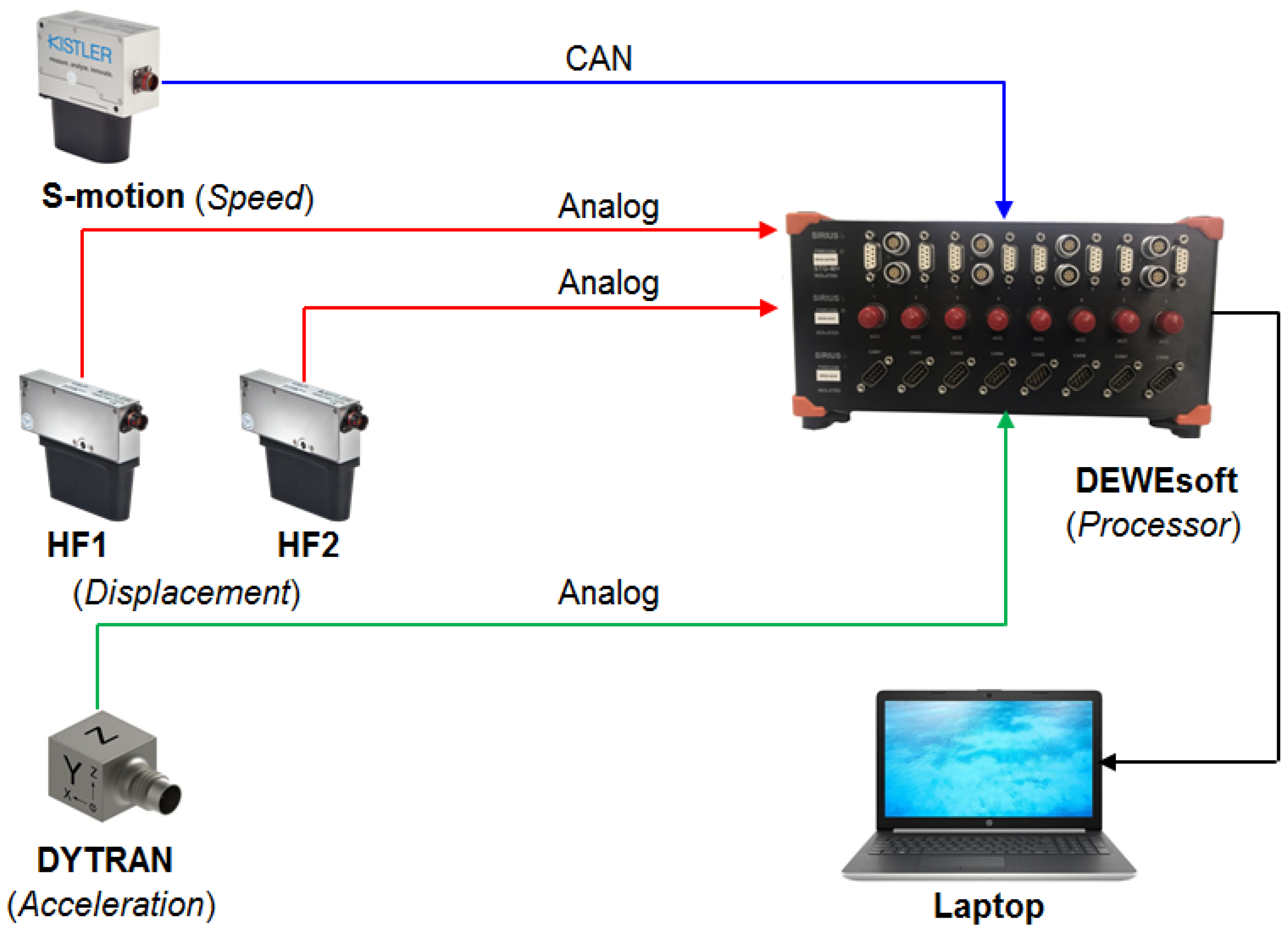
4.2. Equipment for the Experiment
- −
- Displacement measurement sensor (02 units), HF-750C by Kistler (Ostfildern, Germany).
- −
- Acceleration measurement sensor (01 unit), DYTRAN-3263A2 by DYTRAN Instruments, Inc. (Chatsworth, CA, USA).
- −
- Vehicle speed sensor (01 chiếc), Correvit S-motion DTI model 2055A by Kistler (Ostfildern, Germany).
- −
- Signal processor set, model SIRIUS, a set of 3 types: SIRIUSi-8xSTGM+, SIRIUSi-8xACC, and SIRIUSi-8xCAN, by DEWEsoft (Trbovlje, Slovenia).
- −
- A computer for control and displaying measurement results.
4.3. The Design of Experiments
4.4. Results
4.5. Comparison of the Results in Simulation and Experiments
5. Simulation Results Analysis
- −
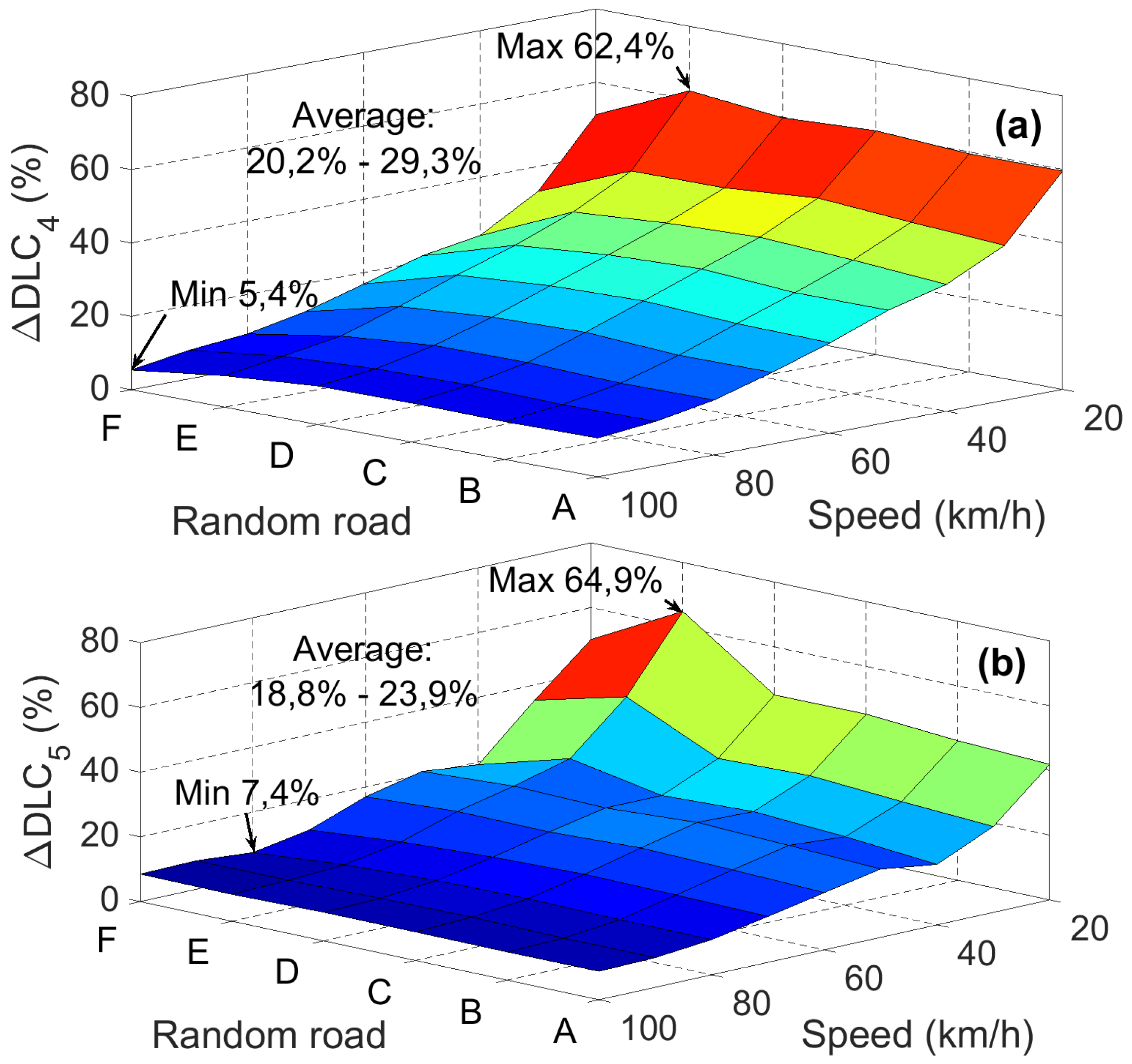
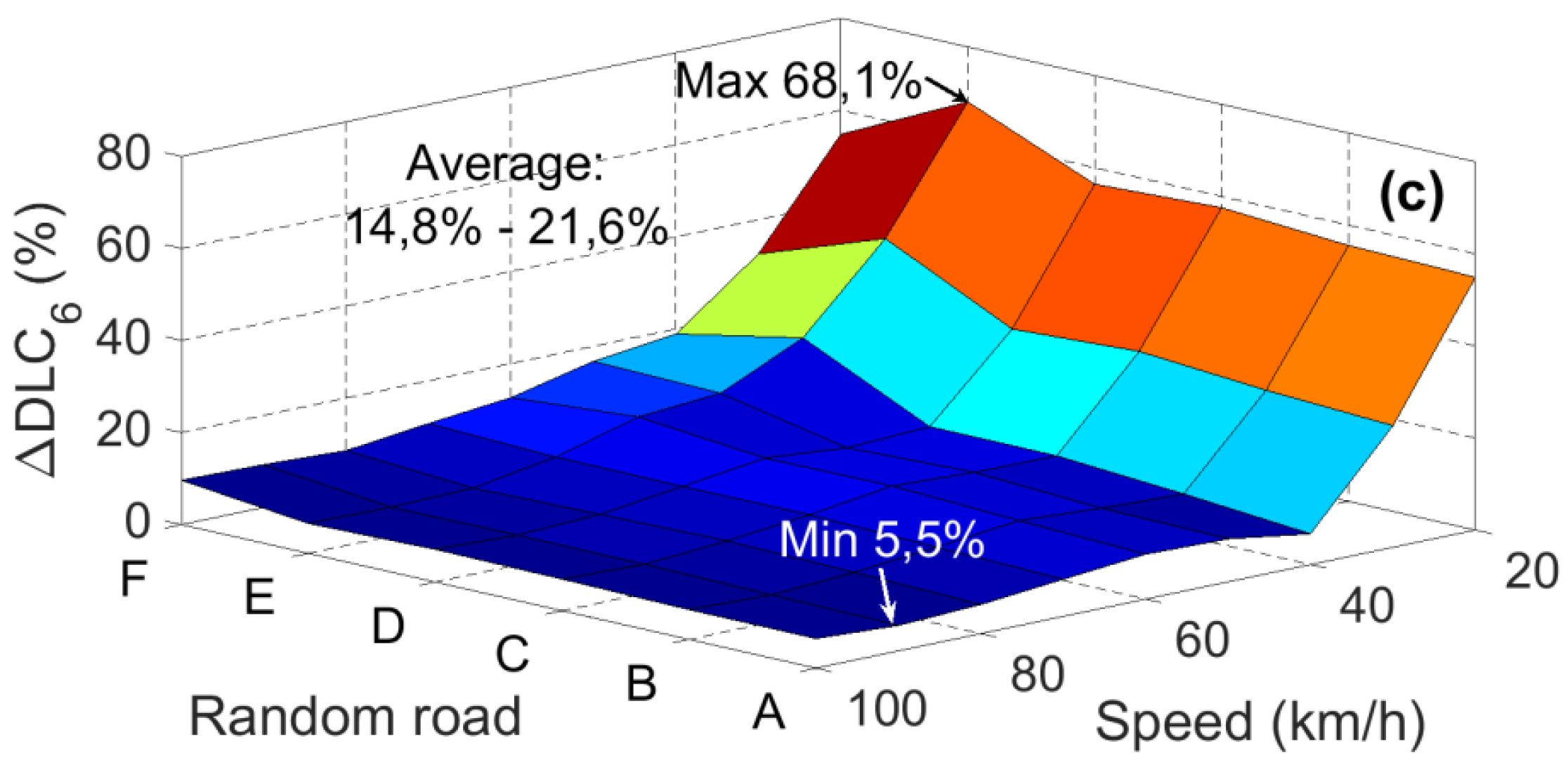
- ΔDLC in both suspension systems became smaller when the vehicle speed was higher. At low speed, the extent of the reduction in DLC was remarkable: by 62.4% at the 4th axle, at 20 km/h, on the road type E, by 64.9% at the 5th axle on the road type E, and by 68.1% at the 6th axle on the road type E. When vehicle speed increased, the extent to which DLC reduced was smaller: by 5.4% at the speed of 100 km/h, on the road type F, at the 4th axle, by 7.4% at the speed of 80 km/hm on the road type F, at the 5th axle, and by 5.5% at the speed of 90 km/h, on the road type A, at the 6th axle.
- −
- The average ΔDLC value with both suspension systems gradually reduced from the 4th axle to the 6th axle; at the 4th axle, it was reduced the most, by 29.3%, at the 5th axle by 23.9%, and at the 6th axle by 21.6%.
- −
- −
- The excitation of each axle is not simultaneous, there is a phase difference between axles.
- −
- The geometrical position of each axle relative to the vehicle’s center of gravity is different, leading to a different vertical displacement at each axle.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Equations to Determine Binding Forces
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Parameters | Symbol | Value | Unit |
|---|---|---|---|---|
| 1 | Distance from CG of tractor to 1st axle | l1 | 1.522 | m |
| 2 | Distance from CG of tractor to 2nd axle | l2 | 1.528 | m |
| 3 | Distance from CG of tractor to 3rd axle | l3 | 2.828 | m |
| 4 | Distance from CG of tractor to 5th wheel | lk1 | 1.918 | m |
| 5 | Distance from CG of semi-trailer to kingpin | lk2 | 5.377 | m |
| 6 | Distance from CG of semi-trailer to 4th axle | l4 | 2.493 | m |
| 7 | Distance from CG of semi-trailer to 5th axle | l5 | 3.803 | m |
| 8 | Distance from CG of semi-trailer to 6th axle | l6 | 5.113 | m |
| 9 | Tire trace on 1st axle of tractor | 2b1 | 2.06 | m |
| 10 | Tire trace on 2nd and 3rd axles of tractor | 2b2, 2b3 | 1.85 | m |
| 11 | Tire trace on 4th, 5th, and 6th axles of semi-trailer | 2b4, 2b5, 2b6 | 1.84 | m |
| 12 | Width between 2 leaf springs of 1st axle of tractor | 2w1 | 0.88 | m |
| 13 | Width between 2 leaf springs of 2nd and 3rd axles of tractor | 2w2, 2w3 | 1.02 | m |
| 14 | Width between 2 air springs of 4th, 5th, and 6th axles of semi-trailer | 2w4, 2w5, 2w6 | 0.89 | m |
| 15 | Static tire diameter of tractor and semi-trailer | rij | 0.542 | m |
| 16 | Sprung mass of tractor | m1 | 6490 | kg |
| 17 | Sprung mass of semi-trailer | m2 | 36,210 | kg |
| 18 | Un-sprung mass distributed on 1st axle of tractor | mA1 | 570 | kg |
| 19 | Un-sprung mass distributed on 2nd and 3rd axles of tractor | mA2, mA3 | 785 | kg |
| 20 | Un-sprung mass distributed on 4th, 5th, and 6th axles of semi-trailer | mA4, mA5, mA6 | 750 | kg |
| 21 | Leaf spring stiffness of wheels 11 and 12 of tractor | C11, C12 | 250,000 | N/m |
| 22 | Leaf spring stiffness of wheels 231 and 232 of tractor | C231, C232 | 1,400,000 | N/m |
| 23 | Tire stiffness of wheels 11 and 12 of tractors | CL11, CL12 | 980,000 | N/m |
| 24 | Leaf spring stiffness of wheels 41, 42, 51, 52, 61, and 62 of semi-trailer | C4j, C5j, C6j | 313,700 | N/m |
| 25 | Tire stiffness of wheels 21, 22, 31, and 32 of tractor | CL2j, CL3j | 1,960,000 | N/m |
| 26 | Tire stiffness of wheels 41, 42, 51, 52, 61, and 62 of semi-trailer | CL4j, CL5j, CL6j | 1,960,000 | N/m |
| 27 | Damping coefficient of wheels 11 and 12 of tractor | K11, K12 | 15,000 | Ns/m |
| 28 | Damping coefficient of wheels 231 and 232 of tractor | K231, K232 | 30,000 | Ns/m |
| 29 | Damping coefficient of wheels 41, 42, 51, 52, 61, and 62 of semi-trailer | K4j, K5j, K6j | 15,000 | Ns/m |
| 30 | Effective area of the air spring (calculated for 1 air spring) | Ae | 0.0483 | m2 |
| 31 | Diameter of the air spring | Db | 0.248 | m |
| 32 | The inner diameter of the pipe | dp | 0.01 | m |
| 33 | Pipe length | lp | 3 | m |
| 34 | Initial pressure of the air spring in full load | p0 | 818,000 | Pa |
| 35 | Pressure of reservoir | pr | 8.5 × 105 | Pa |
| 36 | Atmospheric pressure | pa | 1.0 × 105 | Pa |
| 37 | Initial volume of the air spring | Vb0 | 12 × 10−3 | m3 |
| 38 | Volume of reservoir (one piece) | Vr0 | 0.048 | m3 |
| 39 | Specific mass density of atmospheric air in standard condition | ρ | 1.185 | kg/m3 |
| 40 | Adiabatic coefficient | n | 1.4 | / |
| 41 | Non-linear exponential factor | β | 1.8 | / |
| 42 | Loss coefficient | kt | 3.5 | / |
References
- Available online: https://hdstruckdrivinginstitute.com/blog/semi-trucks-numbers/ (accessed on 6 November 2021).
- Number of Lories, Road Tractors, Semi-Trailers and Trailers. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=File:Number_of_lorries,_road_tractors,_semi-trailers_and_trailers,_2012.png#file (accessed on 6 November 2021).
- Cebon, D. Handbook of Vehicle-Road Interaction; Taylor & Francis: London, UK; New York, NY, USA, 1999; pp. 310–334. [Google Scholar]
- Chen, Y. Modeling Control and Design STUDY of Balanced Pneumatic Suspension for Improved Roll Stability in Heavy Trucks. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2017; p. 8. [Google Scholar]
- Wang, J. Nonlinear Modeling and h-Infinity Model Reference Control of Pneumatic Suspension System. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2012. [Google Scholar]
- Quaglia, G.; Sorli, M. Air Suspension Dimensionless Analysis and Design Procedure; Department of Mechanics, Politecnico di Torino: Torino, Italy, 2001. [Google Scholar]
- Van Tan, V. Enhancing the Roll Stability of Heavy Vehicles by Using an Active Anti-Roll Bar System. Ph.D. Thesis, University Grenoble Alpes, Grenoble, France, 2017. [Google Scholar]
- Zhu, H.; Yang, J.; Zhang, Y.; Feng, X. A novel air spring dynamic model with pneumatic thermodynamics, effective friction and viscoelastic damping. J. Sound Vib. 2017, 408, 87–104. [Google Scholar] [CrossRef]
- Nieto, A.J.; Morales, A.L.; Gonzalez, A.; Chicharro, J.M.; Pintado, P. An analytical model of pneumatic suspension based on an experimental characterization. J. Sound Vib. 2008, 313, 290–307. [Google Scholar] [CrossRef] [Green Version]
- Chang, F.; Lu, Z.H. Dynamic Model of an Air Spring and Integration into a Vehicle Dynamics Model. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 1813–1825. [Google Scholar] [CrossRef]
- Chen, Y.; He, J.; King, M.; Chen, W.; Wang, C.; Zhang, W. Model development and Dynamic Load-Sharing of Longitudinal-Connected Air Suspensions. J. Mech. Eng. 2013, 59, 14–24. [Google Scholar] [CrossRef] [Green Version]
- White, D.L. Parametric Study of Leveling System Characteristics on Roll Stability of Trailing Arm Air Suspension for Heavy Trucks; SAE Technical Paper No. 2000-01-3480; SAE International: Warrendale, PA, USA, 2000. [Google Scholar]
- Nakajima, T.; Shimokawa, Y.; Mizuno, M.; Sugiyama, H. Air Suspension System Model Coupled with Leveling and Differential Pressure Valves for Railroad Vehicle Dynamics Simulation. J. Comput. Nonlinear Dyn. 2014, 9, 031006. [Google Scholar] [CrossRef]
- Sayyaadi, H.; Shokouhi, N. Effects of Air Reservior Volume and Connecting Pipes Length and Diameter on the Air Spring Behavior in Rail-Vehicles; Department of Mechanical Engineering, Sharif University of Technology: Sharif, Iran, 2009. [Google Scholar]
- Moheyeldein, M.M.; Abd-El-Tawwab, A.M.; Abd El-gwwad, K.A.; Salem, M.M. An analytical study of the performance indices of air spring suspensions over the passive suspension. Beni-Suef Univ. J. Basic Appl. Sci. 2018, 7, 5245–5534. [Google Scholar] [CrossRef]
- Abid, H.J.; Chen, J.; Nassar, A.A. Equivalent air spring suspension model for quarter-passive model of passenger automobiles. Hindawi Publ. Corp. Int. Sch. Res. Not. 2015, 2015, 974020. [Google Scholar] [CrossRef] [Green Version]
- Tang, G.; Zhu, H.; Zhang, Y.; Sun, Y. Studies of Air Spring Mathematical Model and Its Performance in Cab Suspension System of Commercial Vehicle; SAE Technical Paper 2015-01-0608; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Hondo, T.; Tanaka, T. Investigation of relationship between initial setting of leveling valves and air spring pressure of a railway vehicle when assuming the centrifugal force action. In The IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks; Springer: Cham, Switzerland, 2020; pp. 252–260. [Google Scholar]
- Razdan, S.; Awasare, P.J.; Bhave, S.Y. Active Vibration Control using Air Spring. J. Inst. Eng. Ser. C 2018, 100, 1–12. [Google Scholar] [CrossRef]
- Buhari, R.; Rohani, M.M.; Abdullah, M.E. Dynamic Load Coefficient of Tyre Forces from Truck Axles. Appl. Mech. Mater. 2013, 405–408, 1900–1911. [Google Scholar] [CrossRef] [Green Version]
- Siddiqui, O.M. Dynamic Analysis of a Modern Urban Bus for Assessment of Ride Quality and Dynamic Wheel Loads. Ph.D. Thesis, Concordia University, Montreal, QC, Canada, 2000. [Google Scholar]
- Muluka, V. Optimal Suspension Damping and Axle Vibration Absorber for Reduction of Dynamic Tyre Loads. Ph.D. Thesis, Concordia University Montreal, Montreal, QC, Canada, 1998. [Google Scholar]
- Hu, P.; Zhang, X.N.; Tian, S. Research on heavy truck dynamic load coefficient and influence factors. MATEC Web Conf. 2016, 81, 02015. [Google Scholar] [CrossRef] [Green Version]
- Blundell, M.; Harty, D. The Multibody Systems Approach to Vehicle Dynamics; Elsevier: Berlin/Heidelberg, Germany, 2004; pp. 326–393. [Google Scholar]
- Berg, M. A Three-dimensional airspring model with friction and orifice damping. Veh. Syst. Dyn. 1999, 33, 528–539. [Google Scholar] [CrossRef]
- Van Tan, V.; Hung, T.M.; Sename, O. An investigation into the ride comfort of buses using an air suspension system. Int. J. Heavy Veh. Syst. 2021, 28, 184–205. [Google Scholar] [CrossRef]
- ISO 8608. Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data; ISO: Geneva, Switzerland, 2016.
- Sweatman, P.F. A Study of Dynamic Wheel Forces in Axle Group Suspensions of Heavy Vehicles; Australian Road Research Board: Melbourne, Australia, 1983. [Google Scholar]
- Mukaka, M.M. Statistics Corner: A guide to appropriate use of Correlation coefficient in medical research. Malawi Med. J. 2012, 24, 69–71. [Google Scholar]
- Pugi, L.; Alfatti, F.; Berzi, L.; Favilli, T.; Pierini, M.; Forrier, B.; D’hondt, T.; Sarrazin, M. Fast modelling and identification of hydraulic brake plants for automotive applications. Int. J. Fluid Power 2020, 21, 169–210. [Google Scholar] [CrossRef]
- Pugi, L.; Palazzolo, A.; Fioravanti, D. Simulation of railway brake plants: An application to SAADKMS freight wagons. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2008, 222, 321–329. [Google Scholar] [CrossRef]















| No. | Parameters | Symbols | Sensors | Position |
|---|---|---|---|---|
| 1 | Relative displacement of the sprung mass and un-sprung mass at the 4th axle | ξ4-z4 | HF1 | 1 |
| 2 | Displacement of the un-sprung mass at the 4th axle | ξ4 | HF2 | 2 |
| 3 | Acceleration of the sprung mass relative to the 4th axle | DYTRAN | 3 | |
| 4 | Speed of the vehicle | v | S-motion | 4 |
| Speed | r(ξ4–z4) [-] | r(ξ4) [-] | [-] |
|---|---|---|---|
| 10 km/h | 0.8058 | 0.9449 | 0.8547 |
| 20 km/h | 0.8540 | 0.9192 | 0.8560 |
| 30 km/h | 0.8994 | 0.9530 | 0.8381 |
| Speed | max(ξ4–z4) (%) | max(ξ4) (%) | max( ) (%) |
|---|---|---|---|
| 10 km/h | 1.80 | 3.45 | 0.24 |
| 20 km/h | 3.45 | 4.12 | 1.35 |
| 30 km/h | 5.89 | 6.23 | 5.78 |
| ΔDLC4 (%) | Random Road | ||||||
|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | ||
| Speed (km/h) | 20 | 59.5 | 59.5 | 61.0 | 59.8 | 62.4 | 51.2 |
| 30 | 42.2 | 43.8 | 45.6 | 43.7 | 43.5 | 33.2 | |
| 40 | 34.6 | 36.5 | 38.0 | 37.1 | 35.3 | 24.1 | |
| 50 | 30.5 | 30.6 | 32.3 | 31.4 | 29.2 | 21.6 | |
| 60 | 24.6 | 25.1 | 26.6 | 25.9 | 24.1 | 16.9 | |
| 70 | 19.5 | 19.5 | 21.0 | 20.4 | 18.5 | 12.4 | |
| 80 | 15.0 | 14.8 | 15.7 | 15.6 | 13.4 | 9.3 | |
| 90 | 12.2 | 12.0 | 12.5 | 12.2 | 10.9 | 7.8 | |
| 100 | 10.6 | 10.3 | 10.6 | 10.5 | 8.6 | 5.4 | |
| Average | 27.6 | 28.0 | 29.3 | 28.5 | 27.3 | 20.2 | |
| ΔDLC5 (%) | Random Road | ||||||
|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | ||
| Speed (km/h) | 20 | 41.9 | 43.1 | 45.3 | 45.1 | 64.9 | 50.1 |
| 30 | 26.5 | 28.2 | 30.1 | 29.4 | 42.4 | 35.2 | |
| 40 | 18.7 | 21.2 | 22.9 | 21.8 | 27.1 | 19.2 | |
| 50 | 21.1 | 22.3 | 23.4 | 21.8 | 22.5 | 20.9 | |
| 60 | 17.7 | 18.6 | 19.4 | 18.2 | 18.5 | 17.0 | |
| 70 | 14.2 | 14.7 | 15.1 | 14.3 | 13.0 | 10.6 | |
| 80 | 10.9 | 11.0 | 11.4 | 10.9 | 9.7 | 7.4 | |
| 90 | 9.2 | 9.1 | 9.6 | 9.3 | 8.8 | 8.8 | |
| 100 | 8.8 | 8.7 | 8.8 | 8.9 | 8.3 | 8.5 | |
| Average | 18.8 | 19.7 | 20.6 | 20.0 | 23.9 | 19.8 | |
| ΔDLC6 (%) | Random Road | ||||||
|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | ||
| Speed (km/h) | 20 | 54.9 | 55.6 | 57.5 | 56.4 | 68.1 | 54.8 |
| 30 | 26.4 | 27.9 | 30.1 | 28.7 | 42.1 | 32.5 | |
| 40 | 6.7 | 9.1 | 11.1 | 11.2 | 24.3 | 18.9 | |
| 50 | 9.3 | 9.8 | 11.3 | 10.4 | 16.0 | 16.7 | |
| 60 | 9.7 | 10.8 | 12.1 | 11.9 | 14.6 | 12.6 | |
| 70 | 8.1 | 8.8 | 9.6 | 9.5 | 9.7 | 10.7 | |
| 80 | 6.3 | 7.1 | 7.7 | 7.2 | 6.7 | 8.6 | |
| 90 | 5.5 | 5.9 | 6.3 | 6.4 | 6.3 | 9.3 | |
| 100 | 6.4 | 6.5 | 6.9 | 7.1 | 6.5 | 9.6 | |
| Average | 14.8 | 15.7 | 17.0 | 16.5 | 21.6 | 19.3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, D.V.; Tan, V.V.; Niem, V.T.; Sename, O. Evaluation of Dynamic Load Reduction for a Tractor Semi-Trailer Using the Air Suspension System at all Axles of the Semi-Trailer. Actuators 2022, 11, 12. https://doi.org/10.3390/act11010012
Ha DV, Tan VV, Niem VT, Sename O. Evaluation of Dynamic Load Reduction for a Tractor Semi-Trailer Using the Air Suspension System at all Axles of the Semi-Trailer. Actuators. 2022; 11(1):12. https://doi.org/10.3390/act11010012
Chicago/Turabian StyleHa, Dang Viet, Vu Van Tan, Vu Thanh Niem, and Olivier Sename. 2022. "Evaluation of Dynamic Load Reduction for a Tractor Semi-Trailer Using the Air Suspension System at all Axles of the Semi-Trailer" Actuators 11, no. 1: 12. https://doi.org/10.3390/act11010012
APA StyleHa, D. V., Tan, V. V., Niem, V. T., & Sename, O. (2022). Evaluation of Dynamic Load Reduction for a Tractor Semi-Trailer Using the Air Suspension System at all Axles of the Semi-Trailer. Actuators, 11(1), 12. https://doi.org/10.3390/act11010012