
Equivalent Rope Length-Based Trajectory Planning for Double Pendulum Bridge Cranes with Distributed Mass Payloads




Abstract
:1. Introduction
- (1)
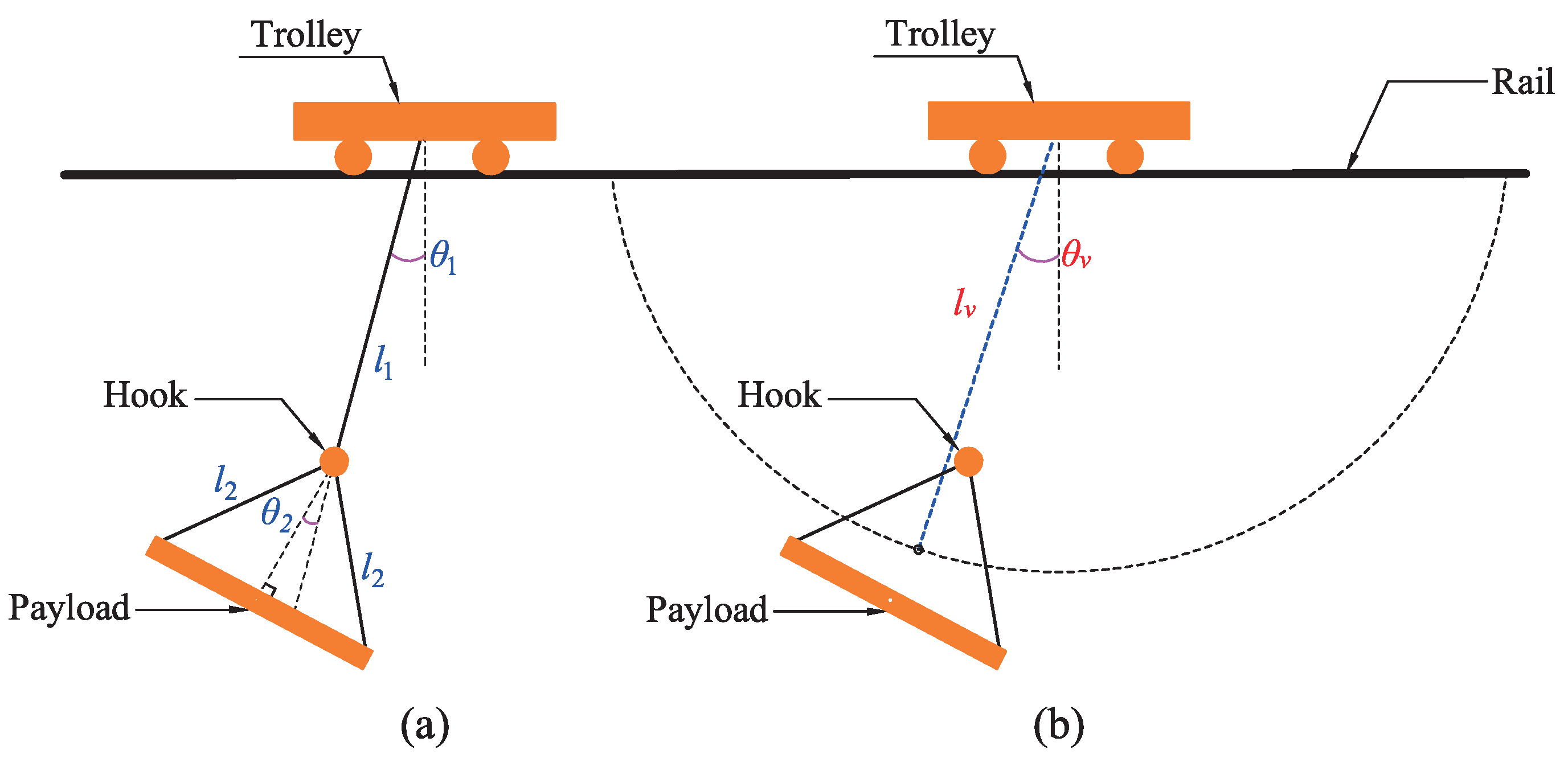
- The concept of the equivalent rope length is proposed to transform the complex double pendulum crane system with the DMP into an equivalent single pendulum crane system;
- (2)
- The mathematical model of the ERL is established and the anti-swing trajectory planning with the ERL is proposed;
- (3)
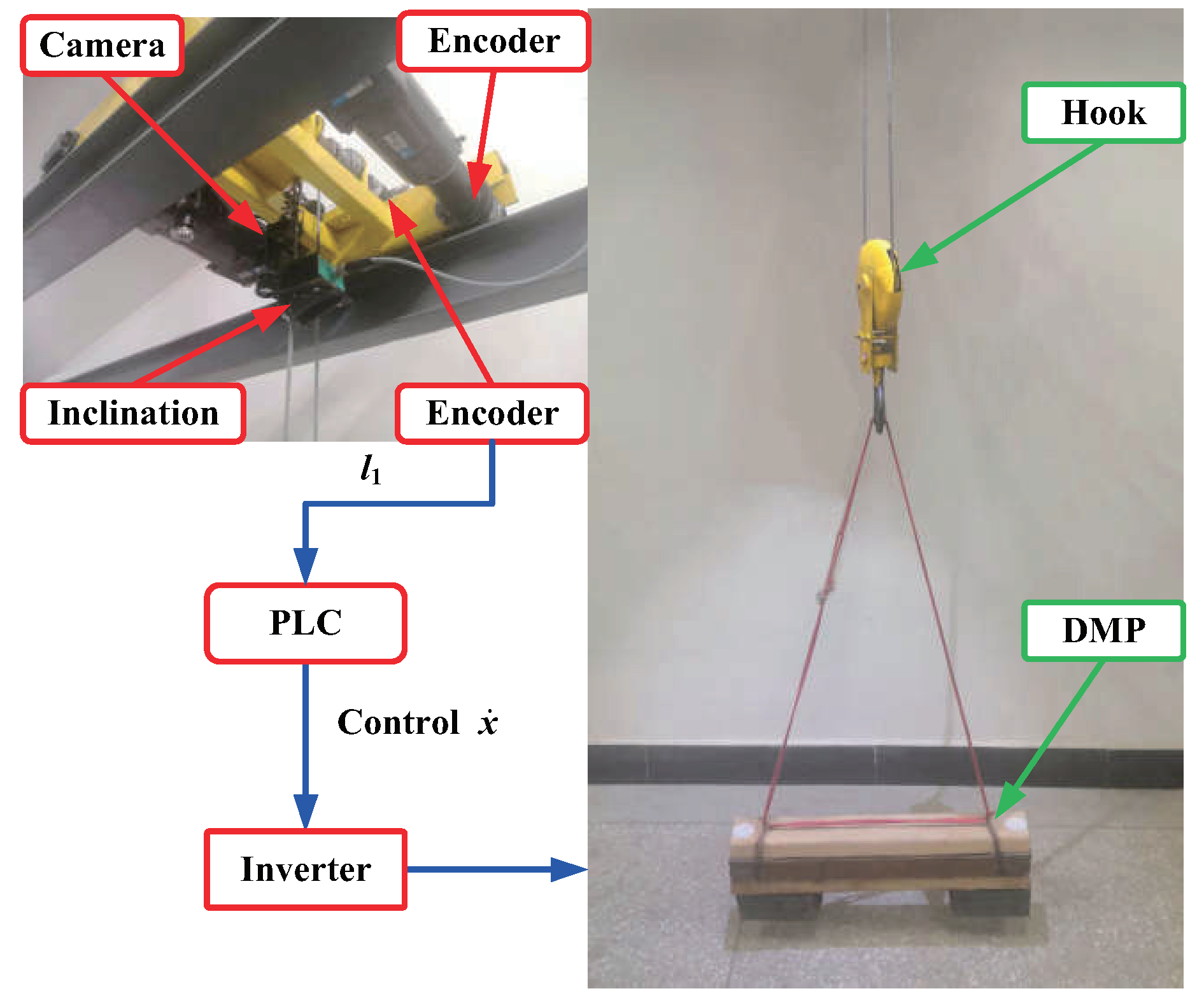
- The effectiveness of the proposed method is verified by the hardware platform including PLC, inverter and asynchronous motor.
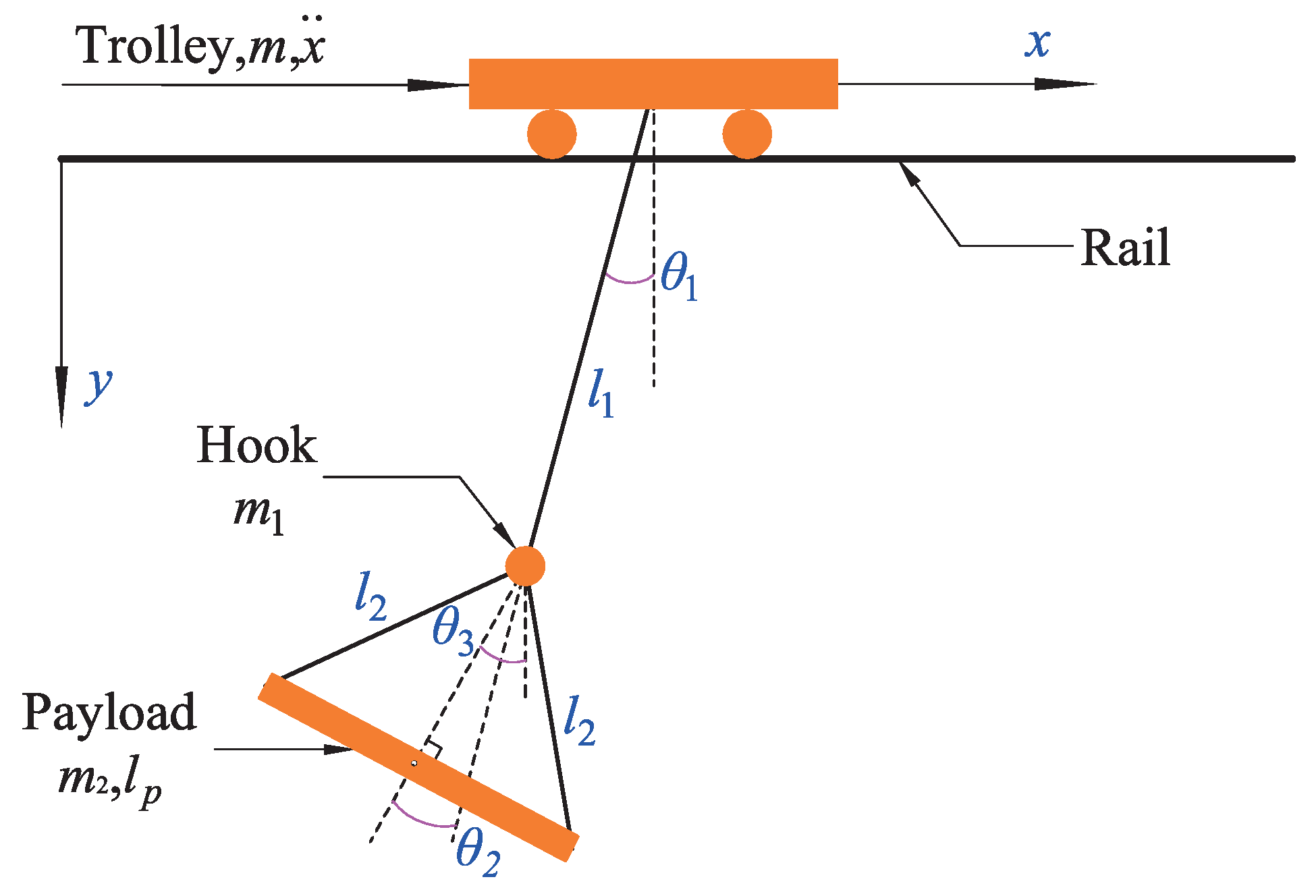
2. Model of the Double Pendulum Crane with the DMP
3. Anti-Swing Trajectory Planning with the ERL
3.1. Concept of the Equivalent Rope Length
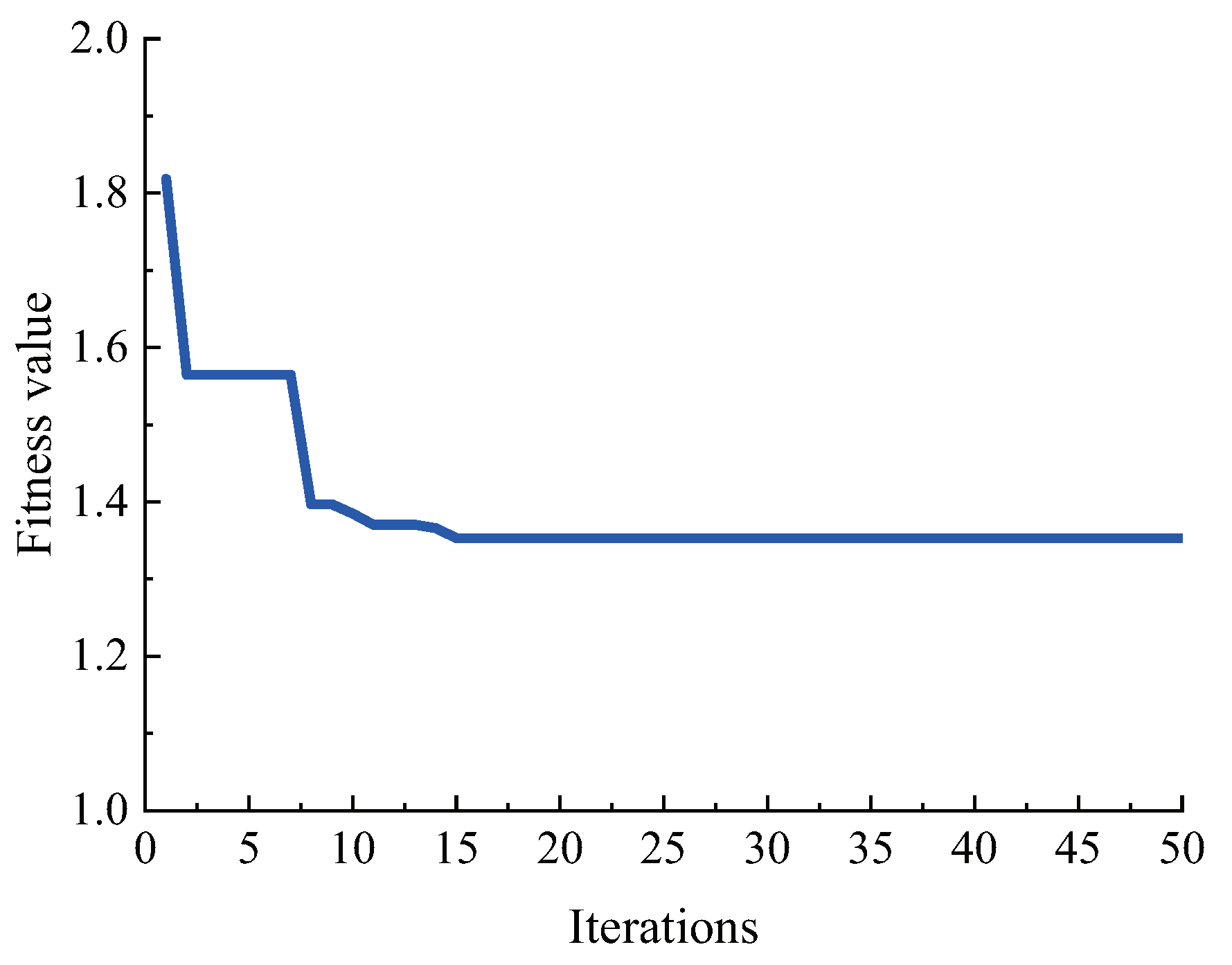
3.2. Anti-Swing Trajectory Planning with the ERL
| Algorithm 1 Penalty Procedure |
| if 0 < < then Fitness value is chosen as Equation (12) else Fitness value is equal to end if |
4. Simulation Verification
4.1. Simulation 1: Comparison with Other Fitness Functions
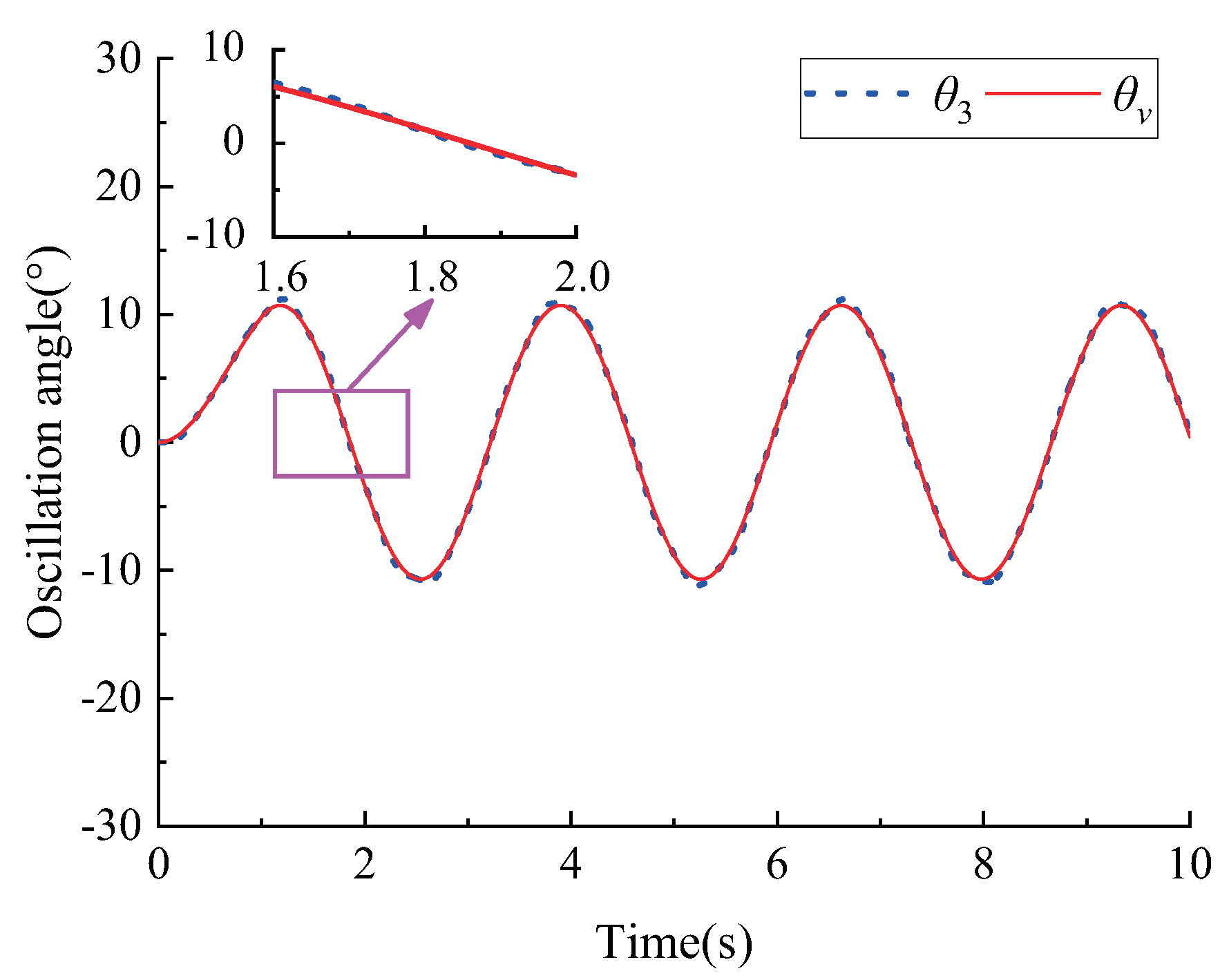
4.2. Simulation 2: Verification the Effectiveness of the Mathematical Model of the ERL
5. Experimental Verification
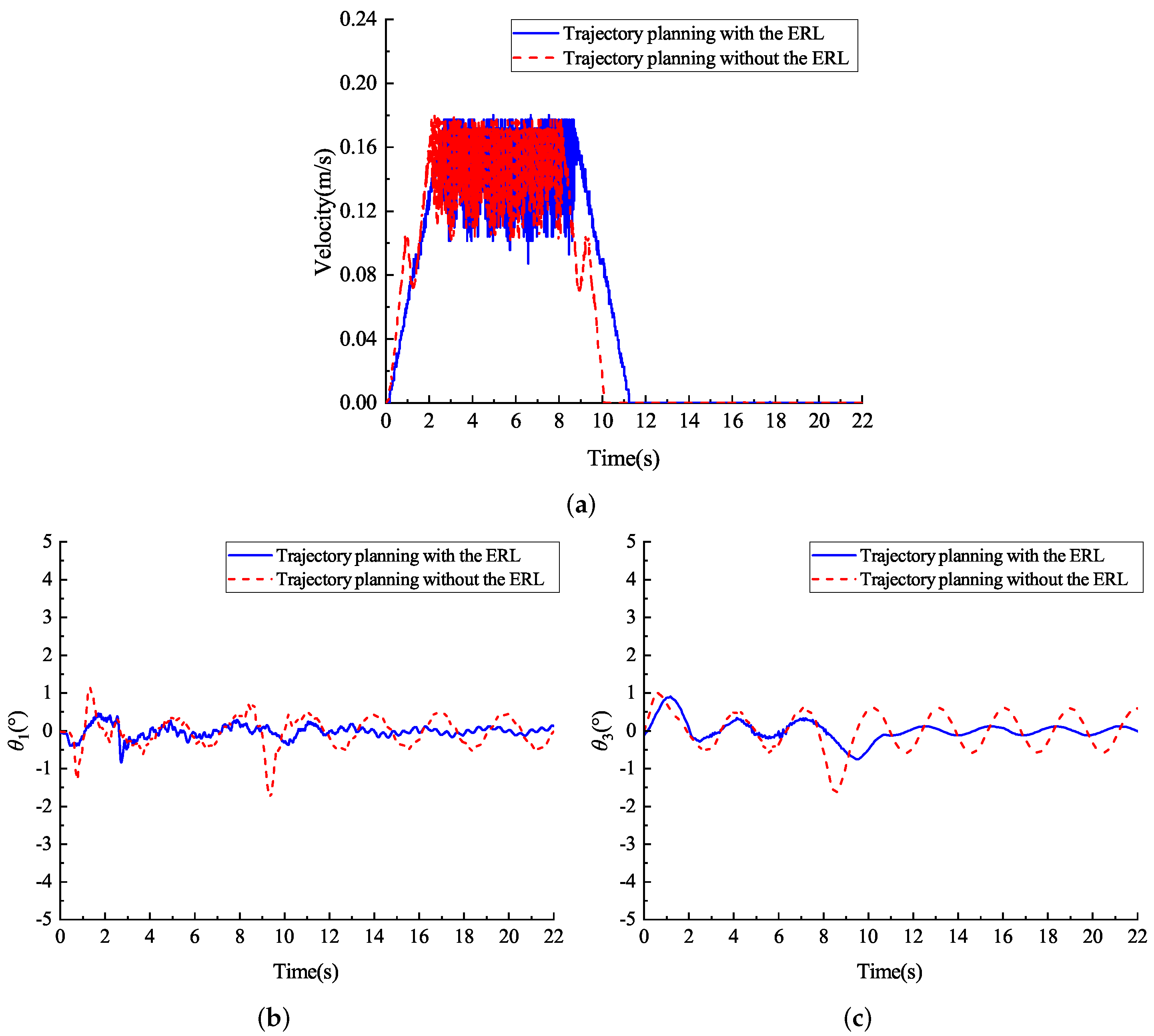
5.1. Experiment 1: Comparison with the Trajectory Planning without the ERL
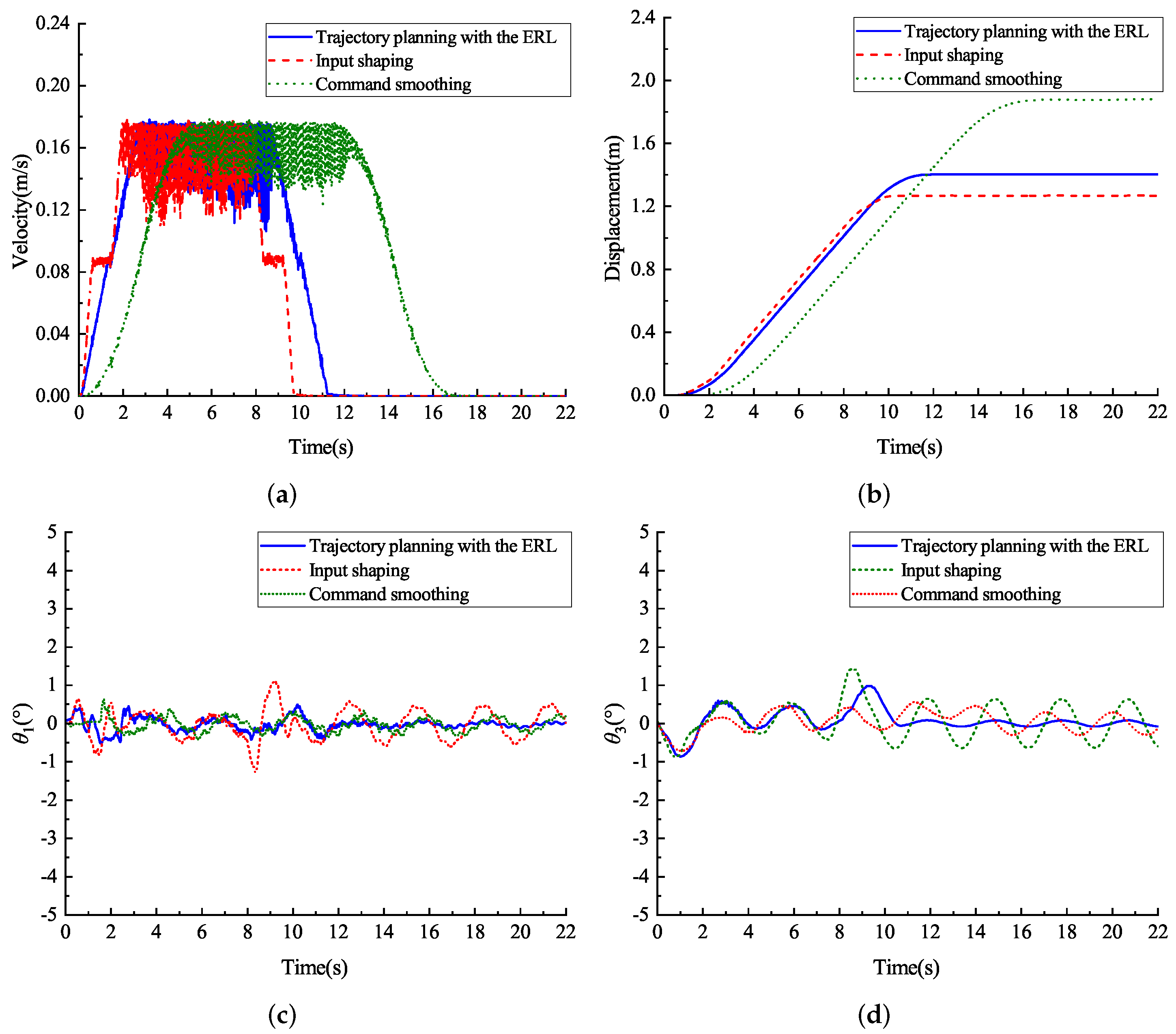
5.2. Experiment 2: Comparison with Existing Methods
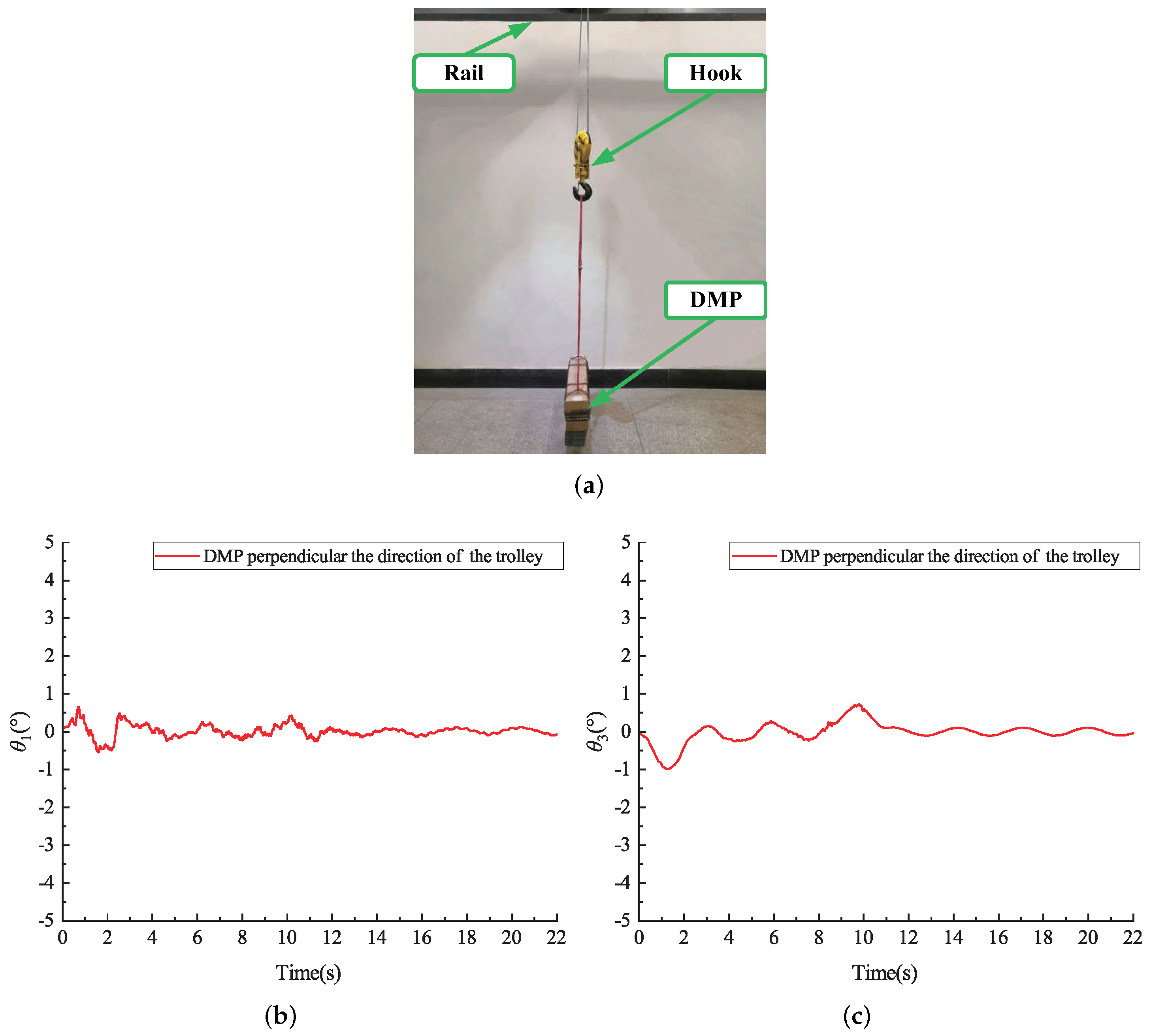
5.3. Experiment 3: Experimental Verification in Different DMP Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ERL | Equivalent rope length |
| DMP | Distributed mass payload |
| PSO | Particle swarm optimization |
| PID | Proportional integral derivative |
References
- Meng, Q.X.; Lai, X.Z.; Yan, Z.; Su, C.Y.; Wu, M. Motion planning and adaptive neural tracking control of an uncertain two-link rigid-flexible manipulator with vibration amplitude constraint. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–15. [Google Scholar] [CrossRef]
- Chen, H.; Sun, N. Nonlinear control of underactuated systems subject to both actuated and unactuated state constraints with experimental verification. IEEE Trans. Ind. Electron. 2019, 67, 7702–7714. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, K.X.; Lei, M.Z.; He, X.X. Disturbance-compensation-based continuous sliding mode control for overhead cranes with disturbances. IEEE Trans. Autom. Sci. Eng. 2020, 17, 2182–2189. [Google Scholar] [CrossRef]
- Zhang, M.H.; Zhang, Y.F.; Cheng, X.G. An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems. Int. J. Control Autom. Syst. 2019, 17, 1579–1588. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Fang, Y.C. Adaptive fuzzy control for a class of MIMO underactuated systems with plant uncertainties and actuator deadzones: Design and experiments. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Chai, L.; Guo, Q.; Liu, H.; Ding, M.B. Linear active disturbance rejection control for double-pendulum overhead cranes. IEEE Access 2021, 9, 52225–52237. [Google Scholar] [CrossRef]
- Zhang, M.H.; Zhang, Y.F.; Ji, B.; Ma, C.H.; Cheng, X.G. Modeling and energy-based sway reduction control for tower crane systems with double-pendulum and spherical-pendulum effects. Meas. Control 2020, 53, 141–150. [Google Scholar] [CrossRef] [Green Version]
- O’Connor, W.; Habibi, H. Gantry crane control of a double-pendulum, distributed-mass load, using mechanical wave concepts. Mech. Sci. 2013, 4, 251–261. [Google Scholar] [CrossRef]
- Abdel-razak, M.H.; Ata, A.A.; Mohamed, K.T.; Haraz, E.H. Proportional–Integral-derivative controller with inlet derivative filter fine-tuning of a double-pendulum gantry crane system by a multi-objective genetic algorithm. Eng. Optim. 2019, 52, 527–548. [Google Scholar] [CrossRef]
- Sun, N.; Fu, Y.; Yang, T.; Zhang, J.Y.; Fang, Y.C.; Xin, X. Nonlinear motion control of complicated dual rotary crane systems without velocity feedback: Design, analysis, and hardware experiments. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1017–1029. [Google Scholar] [CrossRef]
- Ouyang, H.M.; Xu, X.; Zhang, G.M. Energy-shaping-based nonlinear controller design for rotary cranes with double-pendulum effect considering actuator saturation. Autom. Constr. 2020, 111, 103054. [Google Scholar] [CrossRef]
- Fu, Y.; Sun, N.; Yang, T.; Qiu, Z.H.; Fang, Y.C. Adaptive coupling anti-swing tracking control of underactuated dual boom crane systems. IEEE Trans. Syst. Man Cybern.-Syst. 2021, 1–13. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Fang, Y.C.; Wu, Y.M.; Chen, H. Transportation control of double-pendulum cranes with a nonlinear quasi-PID scheme: Design and experiments. IEEE Trans. Syst. Man Cybern.-Syst. 2018, 49, 1408–1418. [Google Scholar] [CrossRef]
- Ouyang, H.M.; Deng, X.; Xi, H.; Zhang, G.M.; Mei, L. Novel robust controller design for load sway reduction in double-pendulum overhead cranes. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4359–4371. [Google Scholar] [CrossRef]
- Ouyang, H.M.; Wang, J.; Zhang, G.M.; Mei, L.; Deng, X. Novel adaptive hierarchical sliding mode control for trajectory tracking and load sway rejection in double-pendulum overhead cranes. IEEE Access 2019, 7, 10353–10361. [Google Scholar] [CrossRef]
- Shi, H.T.; Li, G.; Ma, X.; Sun, J. Research on nonlinear coupling anti-swing control method of double pendulum gantry crane based on improved energy. Symmetry 2019, 11, 1511. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, H.M.; Tian, Z.; Yu, L.L.; Zhang, G.M. Adaptive tracking controller design for double-pendulum tower cranes. Mech. Mach. Theory 2020, 153, 103980. [Google Scholar] [CrossRef]
- Qian, D.; Tong, S.; Yang, B.; Lee, S. Design of simultaneous input-shaping-based SIRMs fuzzy control for double-pendulum-type overhead cranes. Bull. Pol. Acad. Sci. Tech. Sci. 2015, 63, 887–896. [Google Scholar] [CrossRef]
- Chen, Q.R.; Cheng, W.M.; Gao, L.C.; Fottner, J. A pure neural network controller for double-pendulum crane anti-sway control: Based on Lyapunov stability theory. Asian J. Control 2021, 23, 387–398. [Google Scholar] [CrossRef]
- Jaafar, H.I.; Mohamed, Z.; Ahmad, M.A.; Wahab, N.A.; Ramli, L.; Shaheed, M.H. Control of an underactuated double-pendulum overhead crane using improved model reference command shaping: Design, simulation and experiment. Mech. Syst. Signal Proc. 2021, 151, 107358. [Google Scholar] [CrossRef]
- Charfeddine, S.; Boudjemline, A.; Ben Aoun, S.; Jerbi, H.; Kchaou, M.; Alshammari, O.; Elleuch, Z.; Abbassi, R. Design of a fuzzy optimization control structure for nonlinear systems: A disturbance-rejection method. Appl. Sci. 2021, 11, 2612. [Google Scholar] [CrossRef]
- Hamidi, F.; Aloui, M.; Jerbi, H.; Kchaou, M.; Abbassi, R.; Popescu, D.; Ben Aoun, S.; Dimon, C. Chaotic particle swarm optimisation for enlarging the domain of attraction of polynomial nonlinear systems. Electronics 2020, 9, 1704. [Google Scholar] [CrossRef]
- Jaafar, H.I.; Mohamed, Z.; Mohd Subha, N.A.; Husain, A.R.; Ismail, F.S.; Ramli, L.; Tokhi, M.O.; Shamsudin, M.A. Efficient control of a nonlinear double-pendulum overhead crane with sensorless payload motion using an improved PSO-tuned PID controller. J. Vib. Control 2018, 25, 907–921. [Google Scholar] [CrossRef]
- Giacomelli, M.; Padula, F.; Simoni, L.; Visioli, A. Simplified input-output inversion control of a double pendulum overhead crane for residual oscillations reduction. Mechatronics 2018, 56, 37. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, M.A.; Ismail, R.M.T.R.; Ramli, M.S.; Nasir, A.N.K.; Ghani, N.A.; Noordin, N.H. Comparison of input shaping techniques for sway suppression in a double-pendulum-type overhead crane. In Proceedings of the 2009 Third UKSim European Symposium on Computer Modeling and Simulation, Athens, Greece, 25–27 November 2009; pp. 321–326. [Google Scholar]
- Jaafar, H.I.; Mohamed, Z.; Ramli, L.; Abdullahi, A.M. Vibration control of a nonlinear double-pendulum overhead crane using feedforward command shaping. In Proceedings of the 2018 IEEE Conference on Systems, Process and Control (ICSPC), Melaka, Malaysia, 14–15 December 2018; pp. 118–122. [Google Scholar]
- Boscariol, P.; Richiedei, D. Robust point-to-point trajectory planning for nonlinear underactuated systems: Theory and experimental assessment. Robot. Comput.-Integr. Manuf. 2018, 50, 256–265. [Google Scholar] [CrossRef]
- Chen, H.; Fang, Y.C.; Sun, N. A swing constrained time-optimal trajectory planning strategy for double pendulum crane systems. Nonlinear Dyn. 2017, 89, 1513–1524. [Google Scholar] [CrossRef]
- Singhose, W.E.; Towell, S.T. Double-pendulum gantry crane dynamics and control. In Proceedings of the 1998 IEEE International Conference on Control Applications (Cat. No. 98CH36104), Trieste, Italy, 4 September 1998; Volume 2, pp. 1205–1209. [Google Scholar]
- Fujioka, D.; Shah, M.; Singhose, W. Robustness analysis of input-shaped model reference control on a double-pendulum crane. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 2561–2566. [Google Scholar]
- Jaafar, H.I.; Mohamed, Z.; Shamsudin, M.A.; Mohd Subha, N.A.; Ramlia, L.; Abdullahi, A.M. Model reference command shaping for vibration control of multimode flexible systems with application to a double-pendulum overhead crane. Mech. Syst. Signal Proc. 2019, 115, 677–695. [Google Scholar] [CrossRef]
- Huang, J.; Liang, Z.; Zang, Q. Dynamics and swing control of double-pendulum bridge cranes with distributed-mass beams. Mech. Syst. Signal Proc. 2015, 54, 357–366. [Google Scholar] [CrossRef]
- Huang, J.; Xie, X.M.; Liang, Z. Control of bridge cranes with distributed-mass payload dynamics. IEEE-ASME Trans. Mechatron. 2014, 20, 481–486. [Google Scholar] [CrossRef]
- Peng, J.H.; Huang, J.; Singhose, W. Payload twisting dynamics and oscillation suppression of tower cranes during slewing motions. Nonlinear Dyn. 2019, 98, 1041–1048. [Google Scholar] [CrossRef]
- Wu, Q.X.; Wang, X.K.; Hua, L.; Xia, M.H. Dynamic analysis and time optimal anti-swing control of double pendulum bridge crane with distributed mass beams. Mech. Syst. Signal Proc. 2020, 144, 106968. [Google Scholar] [CrossRef]
- Wu, Q.X.; Wang, X.K.; Hua, L.; Xia, M.H. Modeling and nonlinear sliding mode controls of double pendulum cranes considering distributed mass beams, varying roped length and external disturbances. Mech. Syst. Signal Proc. 2021, 158, 107756. [Google Scholar] [CrossRef]
- Takemoto, A.; Miyoshi, T.; Terashima, K. Operation assist control system of rotary crane using proposed haptic joystick as man-machine interface. In Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication (IEEE Catalog No. 04TH8759), RO-MAN 2004, Kurashiki, Japan, 22 September 2004; pp. 533–538. [Google Scholar]
- Chen, S.; Wang, Y.; Zhang, P.; Su, C.Y. Continuous control strategy of planar 3-linkage underactuated manipulator based on broad neural network. Actuators 2021, 10, 249. [Google Scholar] [CrossRef]
- Maiti, D.; Acharya, A.; Chakraborty, M.; Konar, A.; Janarthanan, R. Tuning PID and PIλDδ controllers using the integral time absolute error criterion. In Proceedings of the 2008 4th International Conference on Information and Automation for Sustainability, Colombo, Sri Lanka, 12–14 December 2008; pp. 457–462. [Google Scholar]
- Wu, Q.X.; Wang, X.K.; Hua, L.; Xia, M.H. Improved time optimal anti-swing control system based on low-pass filter for double pendulum crane system with distributed mass beam. Mech. Syst. Signal Proc. 2021, 151, 107444. [Google Scholar] [CrossRef]
- Fujioka, D.; Singhose, W. Optimized input-shaped model reference control on double-pendulum system. J. Dyn. Sys. Meas. Control 2018, 140, 101004. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | (kg) | (kg) | (m) | (m) |
|---|---|---|---|---|
| Values | 2.500 | 34.130 | 0.890 | 0.465 |
| Fitness Functions | (m) | (s) | (°) | (°) | (s) |
|---|---|---|---|---|---|
| IAE | 1.859 | 1.368 | 0.764 | 0.032 | 2.736 |
| ITAE | 1.836 | 1.256 | 0.855 | 0.010 | 2.581 |
| ISE | 1.716 | 1.316 | 0.794 | 0.097 | 2.631 |
| ITSE | 1.719 | 1.316 | 0.795 | 0.097 | 2.632 |
| Methods | Amplitude () | Time (s) | ||||||
|---|---|---|---|---|---|---|---|---|
| Input shaping | ||||||||
| 0.22 | 0.22 | 0.22 | 0.22 | 0 | 0.21 | 1.36 | 1.57 | |
| Command smoothing | a | T | ||||||
| 0.176 | 5.44 | |||||||
| Methods | Operation Time (s) | Translational Displacement (m) | |
|---|---|---|---|
| Simulation | Experiment | ||
| Trajectory planning with the ERL | 11.16 | 1.51 | 1.40 |
| Input shaping | 9.54 | 1.37 | 1.27 |
| Command smoothing | 16.88 | 2.01 | 1.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Sun, N.; Wang, X. Equivalent Rope Length-Based Trajectory Planning for Double Pendulum Bridge Cranes with Distributed Mass Payloads. Actuators 2022, 11, 25. https://doi.org/10.3390/act11010025
Wu Q, Sun N, Wang X. Equivalent Rope Length-Based Trajectory Planning for Double Pendulum Bridge Cranes with Distributed Mass Payloads. Actuators. 2022; 11(1):25. https://doi.org/10.3390/act11010025
Chicago/Turabian StyleWu, Qingxiang, Ning Sun, and Xiaokai Wang. 2022. "Equivalent Rope Length-Based Trajectory Planning for Double Pendulum Bridge Cranes with Distributed Mass Payloads" Actuators 11, no. 1: 25. https://doi.org/10.3390/act11010025
APA StyleWu, Q., Sun, N., & Wang, X. (2022). Equivalent Rope Length-Based Trajectory Planning for Double Pendulum Bridge Cranes with Distributed Mass Payloads. Actuators, 11(1), 25. https://doi.org/10.3390/act11010025